狭小空间伸缩梁机构
文献发布时间:2023-06-19 19:35:22
技术领域
本发明属于伸缩梁机构技术领域,特别涉及一种狭小空间伸缩梁机构。
背景技术
目前,机器人设计的领域常用的都是六轴机器人,此种机器人自由度高,动作能力强,工作几乎没有死角。机器人在实际工作过程中,若在空间较大的厂房内或者空间内,机器人通过沿着水平方向设置在较大的底座上,如图14,实现机器臂的自由转动,机器人作业半径较大,工作生产效率较高,主要应用于焊接、铸造、机械加工、智能仓储、汽车、航天等行业领域。
但是,对于空间受限制的厂房内或者应用场合狭小空间内,无法放置占地面积较大的底座,导致机器人无法工作,或只能放置体积较小的底座,会使机器人作业半径减小,机器人无法实现自动化工作。
发明内容
基于此,本发明提供一种狭小空间伸缩梁机构,以解决现有技术中存在的,对于空间受限制的厂房内或者应用场合狭小空间内,机器人作业半径减小,机器人无法实现自动化工作的技术问题。
本发明解决上述技术问题的技术方案如下:
一种狭小空间伸缩梁机构,包括本体、驱动座体及二级伸缩件,所述本体内部设置有腔体,所述驱动座体设置在所述本体上,所述二级伸缩件套接在所述腔体内,且所述驱动座体与所述二级伸缩件连接,所述驱动座体能够带动所述二级伸缩件在所述腔体内移动,所述本体外壁上设置有移动轨道及齿轨,所述驱动座体包括卡接座、卡接槽、齿轮、滑块及驱动电机,所述卡接座设置在所述本体上,所述卡接槽固定设置在所述卡接座上,所述卡接槽卡接在所述移动轨道上,所述齿轮与所述卡接座连接,且所述齿轮与所述齿轨相互啮合,所述滑块固定设置在所述卡接座上,所述驱动电机与所述齿轮连接,用于驱动所述齿轮转动。
优选地,所述二级伸缩件上设置有伸缩轨道,所述本体上设置有轨道槽,且所述轨道槽位于所述腔体内,所述伸缩轨道卡接在所述轨道槽内。
优选地,所述本体上还设置有同步带,所述同步带能够在所述本体上转动,所述驱动座体上设置有第一加紧件,所述第一加紧件与所述同步带连接,所述二级伸缩件上设置有第二加紧件,所述第二加紧件与所述同步带连接。
优选地,所述同步带包括转动轮及转动带,所述转动轮安装在所述本体上,所述转动带套接在所述转动轮上,所述转动轮转动带动所述转动带转动,所述第一加紧件夹持在所述转动带上,所述第二加紧件也夹持在所述转动带上。
优选地,所述移动轨道包括第一轨道及第二轨道,所述第一轨道及第二轨道设置在所述本体上,所述第一轨道位于所述齿轨的正下方,所述第二轨道位于所述本体下底端。
优选地,所述卡接槽包括第一槽体及第二槽体,所述第一槽体及第二槽体设置在所述卡接座上,所述第一槽体卡接在所述第一轨道上,所述第二槽体卡接在所述第二轨道上。
优选地,所述驱动座体还包括定位轮,所述定位轮与所述卡接座连接,且所述定位轮与所述齿轨相互啮合。
优选地,所述滑块上开设有限位槽。
优选地,所述滑块设置有N个,N≥2。
与现有技术相比,本发明至少具有以下优点:
所述狭小空间伸缩梁机构将原水平安装方向改变为竖直安装方式,使机器人即使在水平空间受限制的厂房内也能实现工作,且机器人在竖直空间内,由于厂房的半空中,并无其他物体限制,机器人或机器臂能够实现较大的作业半径,实现了整体结构的稳定性,保证了机器人在工作过程中,机器臂能够高速运转。
附图说明
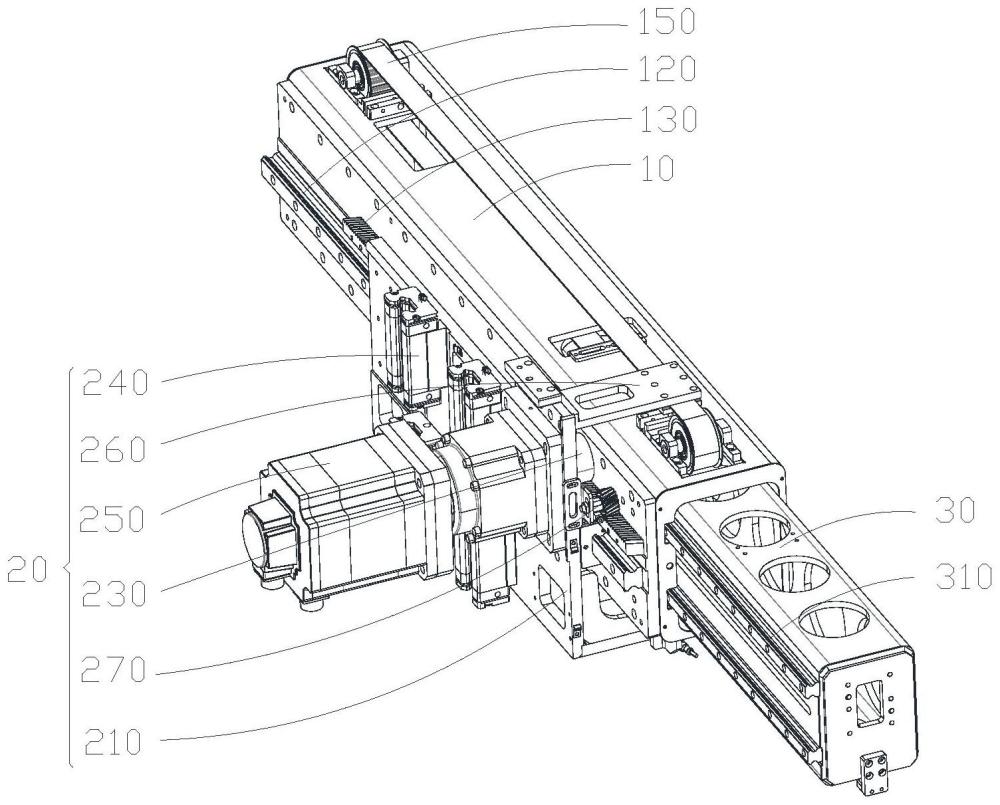
图1为狭小空间伸缩梁机构轴测图。
图2为狭小空间伸缩梁机构正视图。
图3为狭小空间伸缩梁机构右视图。
图4为狭小空间伸缩梁机构俯视图。
图5为驱动座体轴测图。
图6为驱动座体俯视图。
图7为驱动座体主视图。
图8为本体轴测图。
图9为本体主视图。
图10为二级伸缩件轴测图。
图11为现有技术机器人或机械臂与底座安装示意图。该安装方式中,水平放置的底座用于机器人或机械臂水平安装放置,此时机器人或机械臂的重力是作用于底座上。
图12为本发明在车间或厂房安装原理示意图。
图13为图1中隐藏部分结构,用于突出显示第一加紧件、第二加紧件与转动带的连接方式。
图14为现有技术机器人或机械臂安装实际示意图。
图中:本体10、腔体110、移动轨道120、第一轨道121、第二轨道122、齿轨130、轨道槽140、同步带150、转动轮151、转动带152、右半带1521、左半带1522、驱动座体20、卡接座210、卡接槽220、第一槽体221、第二槽体222、齿轮230、滑块240、限位槽241、驱动电机250、第一加紧件260、定位轮270、二级伸缩件30、伸缩轨道310、第二加紧件320。
具体实施方式
以下将结合本发明实施例的附图,对本发明的技术方案做进一步描述,本发明不仅限于以下具体实施方式。
需要理解的是,实施例的附图中相同或相似的标号对应相同或相似的部件。在本发明的描述中,需要理解的是,若有术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
请参看图1、图5及图8,一种狭小空间伸缩梁机构,包括本体10、驱动座体20及二级伸缩件30,所述本体10内部设置有腔体110,所述驱动座体20设置在所述本体10上,所述二级伸缩件30套接在所述腔体110内,且所述驱动座体20与所述二级伸缩件30连接,所述驱动座体20能够带动所述二级伸缩件30在所述腔体110内移动,所述本体10外壁上设置有移动轨道120及齿轨130,所述驱动座体20包括卡接座210、卡接槽220、齿轮230、滑块240及驱动电机250,所述卡接座210设置在所述本体10上,所述卡接槽220固定设置在所述卡接座210上,所述卡接槽220卡接在所述移动轨道120上,所述齿轮230与所述卡接座210连接,且所述齿轮230与所述齿轨130相互啮合,所述滑块240固定设置在所述卡接座210上,所述驱动电机250与所述齿轮230连接,用于驱动所述齿轮230转动。工作过程中:所述狭小空间伸缩梁机构竖直设置在地面上,首先,本体10竖直并固定在地面上,所述驱动座体20在本体10上上下滑动,滑动过程通过驱动电机250转动,带动所述齿轮230转动,所述齿轮230在所述齿轨130上移动,带动所述卡接槽220在所述移动轨道120上移动,进而带动所述卡接座210移动,所述卡接座210上的所述滑块240与机器人的机器臂连接,进而带动机器臂移动,同时,所述驱动座体20与所述二级伸缩件30连接,所述驱动座体20在所述本体10上移动,带动所述二级伸缩件30在所述腔体110内延伸或收缩,一般的,所述二级伸缩件30延伸出腔体110,所述二级伸缩件30会与厂房内的顶部横梁竖梁进行连接,起到固定该装置的作用。
图1为本发明的整体结构图,图11、12为本发明在车间或厂房安装原理示意图。可见,本发明的伸缩梁机构替代原始安装底座,将机器人或机械臂安装在本发明的滑块240上,使机器人或机械臂的重力通过滑块240作用于本体10,将原水平安装方向改变为竖直安装方式,使机器人即使在水平空间受限制的厂房内也能实现工作,且机器人在竖直空间内,由于厂房的半空中,并无其他物体限制,机器人或机器臂能够实现较大的作业半径,将机器人安装位置向上部空间延伸,充分利用工厂内竖直方向内的空间;本体10底部放置并固定于地面上,用于承受机器人的自身全部重力和机器臂在转动或沿本体10上下移动所受到的偏心力,由于机器人安装于本体10的一侧,存在较大的偏心力,使本体10与地面的连接处产生较大的应力,导致本体10不稳定或者产生晃动,所以设置竖直方向的二级伸缩件30,其与厂房的顶部横梁连接,并与本体10形成一个整体,将该伸缩梁机构从顶部、底部两端稳定连接,增加伸缩梁竖直方向的稳定性;同时二级伸缩件30只起到与厂房顶部横梁连接的作用,并不承受机器人的重量,也不会受到机器臂转动过程中偏心力的影响,所以二级伸缩件30和本体10之间的传动连接只实现二级伸缩件30的伸出或缩回,实现了整体结构的稳定性,保证了机器人在工作过程中,机器臂能够高速运转。
作为进一步描述,参看图10,所述二级伸缩件30上设置有伸缩轨道310,所述本体10上设置有轨道槽140,且所述轨道槽140位于所述腔体110内,所述伸缩轨道310卡接在所述轨道槽140内。所述二级伸缩件30能够沿着所述轨道槽140进行位移,并实现所述二级伸缩件30在所述腔体110内的延伸与收缩。
具体的,所述伸缩轨道310设置有两条,同时开设有两道轨道槽140,两条所述伸缩轨道310卡接进所述两道轨道槽140内,起到对所述二级伸缩件30的固定作用,也保证了所述二级伸缩件30在所述腔体110内能够平稳位移。
具体的,所述二级伸缩件30内部呈空壳状,避免了其质量过重,而使所述驱动座体20将所述二级伸缩件30从所述腔体110内延伸出时,使所述驱动座体20产生较大负荷。
为进一步,参看图8及图9,所述本体10上还设置有同步带150,所述同步带150能够在所述本体10上转动,所述驱动座体20上设置有第一加紧件260,所述第一加紧件260与所述同步带150连接,所述二级伸缩件30上设置有第二加紧件320,所述第二加紧件320与所述同步带150连接。所述本体10竖直设置,所述同步带150转动,通过所述第一加紧件260、第二加紧件320与所述同步带150连接,所述同步带150转动时,会带动所述二级伸缩机构从所述腔体110内伸出。
具体的,所述第一加紧件260包括第一上夹口及第一下夹口,所述第一上夹口与所述第一下夹口能够打开和闭合,所述第二加紧件320包括第二上夹口及第二下夹口,所述第二上夹口与所述第二下夹口能够打开和闭合。
进一步地,参看图8,所述同步带150包括转动轮151及转动带152,所述转动轮151安装在所述本体10上,所述转动带152套接在所述转动轮151上,所述转动轮151转动带152动所述转动带152转动,所述第一加紧件260夹持在所述转动带152上,所述第二加紧件320也夹持在所述转动带152上。
具体的,所述转动轮151包括转动轴及轮体,所述转动轴固定设置在所述本体10上,所述轮体套接在所述转动轴上,且能够在所述转动轴上进行转动,一般的,所述转动轮151设置有两个,一条转动带152套接在两个转动轮151上,实现所述转动带152的转动。
具体工作过程:所述第一加紧件260与第二加紧件320会夹持住所述转动带152,并保持固定,所述驱动座体20移动时,带动所述第一加紧件260移动,所述第一加紧件260移动,带动所述转动带152在所述转动轮151上进行转动,同时,由于所述第二加紧件320与所述转动带152夹持,同时,所述第二加紧件320与所述二级伸缩件30固定连接,所述转动带152转动过程中,会带动所述第二加紧件320沿所述第一加紧件260朝相反的方向移动,具体的,参见图13,当所述驱动座体20沿竖直方向向下运动时,带动所述第一加紧件260沿竖直方向向下运动,而所述第一加紧件260与所述右半带1521处于夹紧状态,两者之间不会发生相对移动,所述第一夹紧件260沿竖直方向向下移动过程中带动所述右半带1521沿竖直方向向下运动,随后所述转动轮151转动,同时,带动所述左半带1522沿竖直方向向上运动,所述左半带1522与所述第二夹紧件320相互夹紧,而所述第二夹紧件320与所述二级伸缩件30连接,所述左半带1522沿竖直方向向上运动带动所述二级伸缩件30沿竖直方向向上运动,进而带动所述二级伸缩件30从所述腔体110内伸出,当所述二级伸缩件30延伸至一定长度时,二级伸缩件30的端部会与厂房的横梁连接,例如通过外部连接机构将30的端部与厂房的横梁连接,当所述二级伸缩件30与厂房的横梁连接后,为避免所述驱动座体20在所述本体10上移动时,带动所述转动带152运动,则所述第一加紧件260打开,使所述第一加紧件260与所述转动带152分离,当所述第一加紧件260与所述转动带152分离后,所述驱动座体20在所述本体10上滑动时,所述第一加紧件260不再带动所述转动带152转动,具体的,所述第一加紧件260和第二夹紧件320为夹紧装置,如实施例1,所述第一加紧件260由第一上夹口和第一下夹口组成,第一上夹口与第一下夹口之间设置有螺栓,螺栓穿过所述转动带152同时与所述第一上夹口与第一下夹口连接,用于将所述第一加紧件260固定在所述转动带152上,同理,所述第二加紧件320由第二上夹口和第二下夹口组成,第二上夹口与第二下夹口之间设置有螺栓,螺栓穿过所述转动带152同时与所述第二上夹口与第二下夹口连接,用于将所述第二加紧件320固定在所述转动带152上;实施例2,所述第一加紧件260由第一上夹口和第一下夹口组成,所述第一上夹口与第一下夹口表面设置有防滑橡胶垫,当所述第一上夹口与第一下夹口加紧所述转动带152时,防滑橡胶垫会与所述转动带152相对贴合,用于增大所述第一加紧件与所述转动带152之间的摩擦力,然后通过卡箍固定第一上夹口与第一下夹口,将所述第一夹紧件牢牢固定在所述转动带152上,同理,所述第二加紧件320由第二上夹口和第二下夹口组成,所述第二上夹口与第二下夹口表面设置有防滑橡胶垫,当所述第二上夹口与第二下夹口加紧所述转动带152时,防滑橡胶垫会与所述转动带152相对贴合,用于增大所述第二加紧件与所述转动带152之间的摩擦力,然后通过卡箍固定第二上夹口与第二下夹口,将所述第二夹紧件320牢牢固定在所述转动带152上。
所述第一加紧件260可以独立实现与转动带152的夹紧和松开,当所述第一加紧件260和第二夹紧件320都夹紧转动带152时,通过一个驱动电机250,实现一个驱动电机250同时驱动所述驱动座体20和所述二级伸缩件30,实现同步移动的目的,并且根据工作需要,如果需要单独、分开驱动所述驱动座体20和所述二级伸缩件30,本设计的结构也可以实现,例如,当需要同时调节所述二级伸缩件时,所述第一加紧件260和所述第二夹紧件320同时夹紧所述转动带152,通过驱动电机250转动,即可实现同步驱动,当需要调节机器人的工作高度时,松开所述第一加紧件260与所述转动带152之间的连接,由所述驱动电机250单独带动所述驱动座体20在所述本体10上移动,即可实现自由调节机器人的工作高度。这与现有技术不同,现有技术中,所述二级伸缩件30的移动和驱动座体带动机器人的移动分别由两个驱动电机驱动,或者也有采用一个电机同时驱动的,但是只能实现同时移动,却不能实现所述二级伸缩件30与驱动座体20带动机器人移动的单独、分别调节。
更进一步地,所述移动轨道120包括第一轨道121及第二轨道122,所述第一轨道121及第二轨道122设置在所述本体10上,所述第一轨道121位于所述齿轨130的正下方,所述第二轨道122位于所述本体10下底端,一般的,所述第二轨道122设置在所述同步带150相对面。
进一步地,参看图5,所述卡接槽220包括第一槽体221及第二槽体222,所述第一槽体221及第二槽体222设置在所述卡接座210上,所述第一槽体221卡接在所述第一轨道121上,所述第二槽体222卡接在所述第二轨道122上。当所述第二槽体222卡接在所述第二轨道122上时,由于所述第二轨道122设置在同步带150相对面,则所述第二槽体222设置在所述第一加紧件260相对面,便于将所述第二槽体222卡接在所述第二轨道122上,防止所述第二槽体222从诉搜狐第二轨道122上脱离,也防止所述第一加紧件260发生偏移,便于第一加紧件260加持在所述转动带152上,具有固定和定位的功能。
更进一步地,参看图5,所述驱动座体20还包括定位轮270,所述定位轮270与所述卡接座210连接,且所述定位轮270与所述齿轨130相互啮合,所述定位轮270的直径小于所述齿轮230的直径,所述定位轮270起到对所述齿轮230的定位功能,当发现所述定位轮270出现偏移时,代表所述齿轮230也发生了偏移,能够及时对所述齿轮230进行修正并调节位置,防止齿轮230从所述齿轨130上脱离。
具体的,参看图5至图7,所述滑块240上开设有限位槽241,机器人的机器臂卡接在所述限位槽241内,所述限位槽241能够对机器臂进行固定,防止机器臂从所述限位槽241内脱落。
具体的,所述滑块240设置有N个,N≥2,一般的,所述滑块240设置有4个,便于更好的对机器臂进行固定。
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种应用于狭小空间内的多级联动快速伸缩机构
- 一种适用于梁底与盖梁间狭小空间的桥梁顶升反力装置