一种猕猴桃果实自动摘取机及使用方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及猕猴桃摘取技术领域,具体涉及一种猕猴桃果实自动摘取机及使用方法。
背景技术
猕猴桃质地柔软,口感酸甜,含有猕猴桃碱蛋白水解酶,单宁果胶和糖类等有机物以及钙钾,硒,等人体所需的17种氨基酸还,含有丰富的维生素C葡萄酸,果糖,柠檬酸,苹果酸脂肪,是比较好的水果,猕猴桃作为高枝果类作物,果实产量大,果品成熟较为集中,人工摘取较为不便。
现有技术中,为便于对猕猴桃果实进行摘取,有采用机械臂对猕猴桃果实进行摘取,该采摘方式可大幅度降低人力的浪费,适用于对大量的猕猴桃进行快速摘取,节省了人力物力。
上述通过机械臂对猕猴桃进行摘取的方式虽然提高了猕猴桃的摘取效率,但是机械臂摘取猕猴桃的过程中多无法精准控制夹持猕猴桃的力度,容易造成猕猴桃的损坏,并且为了提高摘取猕猴桃的效率,现有的机械臂摘取猕猴桃过程中对摘取的猕猴桃多采用管道导向,自重落下的方式进行收集,该收集猕猴桃的方式虽然可一定程度上降低猕猴桃落至收集箱内的速度,但是猕猴桃在沿管道落至收集箱内时依旧会可能出现因碰撞而导致的果肉软烂,进而影响摘取的猕猴桃质量。
发明内容
本发明的目的在于提供一种猕猴桃果实自动摘取机及使用方法,解决以下技术问题:
如何避免通过机械臂对猕猴桃摘取夹持过程中易损坏猕猴桃的问题;
如何避免通过猕猴桃在自重作用下沿导管收集的猕猴桃可能因碰撞而导致果肉软烂的问题。
本发明的目的可以通过以下技术方案实现:
一种猕猴桃果实自动摘取机,包括车体和安装在车体上的机械臂;
安装在所述机械臂上的摘取筒,所述摘取筒上安装有视觉传感器,所述摘取筒内设有柔性夹持组件,用于对猕猴桃进行夹持;
设于所述摘取筒上的挡杆组件,用于对猕猴桃枝柄进行阻挡限位;
滑动连接在所述车体内的泵气组件,所述泵气组件通过波纹管与摘取筒相连通,用于对猕猴桃进行除尘和减缓其下落速度;
设于所述车体内的分拣组件,用于对不同重量的猕猴桃进行分拣存放。
于一实施例中,所述柔性夹持组件包括环状气囊,所述环状气囊固定连接在摘取筒内壁上;
所述摘取筒底端连通有锥形筒,所述锥形筒底端与波纹管相连通,所述锥形筒侧壁上连通有第一导气管,所述第一导气管远离锥形筒的一端与环状气囊相连通,所述第一导气管内安装有压力阀。
进一步地,所述摘取筒靠近底端的侧壁上固定连接有收纳盒,所述收纳盒内滑动连接有封堵板,所述封堵板上安装有压力传感器,所述摘取筒内开设有与封堵板相对应的封堵滑槽;
所述收纳盒内固定连接有电动伸缩杆,所述电动伸缩杆伸缩端与封堵板固定连接。
进一步地,所述挡杆组件包括活塞筒,所述活塞筒固定连接在摘取筒上,所述活塞筒内滑动连接有活塞头,所述活塞头上固定连接有顶杆,所述顶杆远离活塞头一端上固定连接有中空挡杆;
所述环状气囊通过第二导气管与活塞筒相连通,所述活塞筒内设有拉簧,所述拉簧两端分别与活塞筒和活塞头固定连接。
进一步地,所述活塞筒靠近中空挡杆方向的侧壁上连通有导气软管,所述导气软管远离活塞筒一端与中空挡杆相连通,所述中空挡杆上开设有开口朝下的喷气孔。
进一步地,所述摘取筒靠近机械臂方向的侧壁上固定连接有泄气管,所述泄气管与环状气囊相连通,所述泄气管上连通有开口向下的朝向管;
所述泄气管内滑动连接有滑动杆,所述滑动杆上开设有通气槽,所述通气槽内壁上开设有开口向下的通孔,所述通孔与朝向管相配合;
所述泄气管内固定连接有挡环,所述挡环上固定连接有弹簧,所述弹簧远离挡环的一端与滑动杆固定连接,所述机械臂上固定连接有与滑动杆相配合的顶块。
于一实施例中,所述泵气组件包括分拣滑块,所述分拣滑块滑动连接在车体内,所述分拣滑块内开设有空腔,所述空腔与波纹管底端相连通,所述分拣滑块一侧固定连接有气泵,所述气泵输出端与空腔相连通。
进一步地,所述分拣组件包括螺纹杆,所述螺纹杆转动连接在车体内,所述分拣滑块螺纹连接在螺纹杆上且底部与车体内壁相贴合,所述螺纹杆一端固定连接有从动齿轮;
所述车体内固定连接有伺服电机,所述伺服电机输出端上固定连接有主动齿轮,所述主动齿轮与从动齿轮相啮合。
进一步地,所述车体内通过挡板和隔板分隔成三个存放腔,所述挡板上开设有与各个存放腔相对应的进料口,所述进料口上转动连接有配重板;
所述空腔侧壁上开设有排料口,所述排料口与进料口相配合;
所述车体上转动连接有卸货门,用于对三个所述存放腔进行封堵,所述卸货门上开设有多个通气孔,所述车体上转动连接有锁扣,所述锁扣与卸货门相配合。
一种猕猴桃果实自动摘取机的使用方法,具有以下步骤:
第一步:启动车体和气泵,车体移动至待摘取的猕猴桃下方,机械臂驱动摘取筒向猕猴桃方向靠近,经视觉传感器的定位精准的将摘取筒套至猕猴桃周围,气泵通过波纹管、摘取筒输送的空气对猕猴桃底部及周围表面进行除尘;
第二步:控制封堵板移动对摘取筒底端进行封堵,气泵输送的空气对环状气囊和活塞筒进行充气,环状气囊对摘取筒内猕猴桃进行柔性夹持,活塞筒内活塞头滑动推动中空挡杆对此猕猴桃枝柄进行限定阻挡,然后喷气孔喷出的空气对猕猴桃上表面进行除尘;
第三步:机械臂驱动摘取筒转动对猕猴桃进行摘取,顶块对滑动杆进行顶动,环状气囊和活塞筒内空气通过泄气管排出,猕猴桃自重落至压力传感器上,对猕猴桃重量进行测量并控制封堵板收缩,猕猴桃经波纹管落入分拣滑块内,波纹管内气流对猕猴桃下落速度进行降低;
第四步:分拣滑块移动至对应存放腔进料口出,摘取筒对下一个猕猴桃柔性夹持时,封堵板对摘取筒封堵,波纹管及分拣滑块内气压上升,顶动配重板转动打开,气流推动分拣滑块内猕猴桃进入对应存放腔内。
本发明的有益效果:
(1)本发明通过封堵板对摘取筒进行封堵,使锥形筒内的空气突破压力阀的阻挡经第一导气管进入环状气囊内,从而使环状气囊膨胀以达到对位于摘取筒内猕猴桃进行柔性夹持的目的。
(2)本发明通过猕猴桃在摘取完成后在其自重落下过程中,气流在波纹管内较大的流速,对经波纹管滑落的猕猴桃产生较大的反向作用力,如此可达到对猕猴桃下落速度充分减缓的目的。
(3)本发明通过机械臂驱动摘取筒以中空挡杆为转动轴进行转动,从而使猕猴桃枝柄和猕猴桃连接处产生较大的拉力,进而使猕猴桃和猕猴桃枝柄相脱离,从而完成对该猕猴桃的摘取。
(4)本发明通过伺服电机驱动螺纹杆转动,可驱动分拣滑块在螺纹杆方向上移动,使排料口与需要存放的存放腔的配重板相对齐,当封堵板对摘取筒进行封堵时,波纹管和空腔内气压会增大,此时空腔内的气压会顶动此时与其相对应存放腔的配重板,此时进入存放腔内的气流会带动放置在空腔内的猕猴桃滚动至该存放腔内。
附图说明
下面结合附图对本发明作进一步的说明。
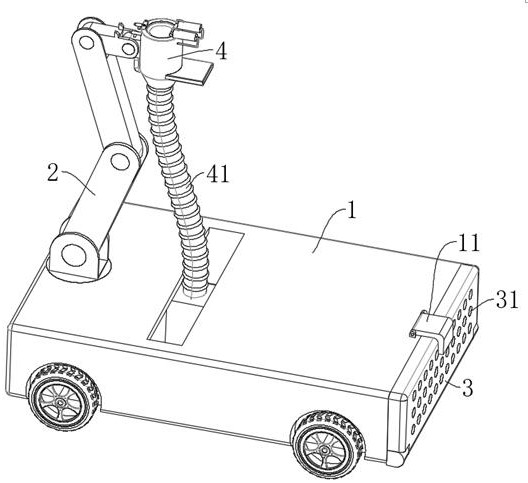
图1是本发明提出的一种猕猴桃果实自动摘取机的结构示意图;
图2是本发明提出的一种猕猴桃果实自动摘取机摘取筒部分的结构示意图;
图3是本发明提出的一种猕猴桃果实自动摘取机柔性夹持组件的结构示意图;
图4是本发明提出的一种猕猴桃果实自动摘取机挡杆组件的结构示意图;
图5是本发明提出的一种猕猴桃果实自动摘取机泄气管部分的结构示意图;
图6是本发明图5中A区域的局部结构放大图;
图7是本发明提出的一种猕猴桃果实自动摘取机车体部分的正视图;
图8是本发明图7中B区域的局部结构放大图;
图9是本发明提出的一种猕猴桃果实自动摘取机车体部分的俯视图。
附图标记:1、车体;11、锁扣;12、存放腔;13、挡板;14、配重板;15、隔板;2、机械臂;21、顶块;3、卸货门;31、通气孔;4、摘取筒;41、波纹管;42、视觉传感器;43、收纳盒;431、封堵板;432、压力传感器;44、环状气囊;45、第一导气管;451、压力阀;46、锥形筒;5、活塞筒;51、第二导气管;52、导气软管;53、拉簧;6、泄气管;61、滑动杆;62、通气槽;63、通孔;64、朝向管;65、挡环;66、弹簧;7、中空挡杆;71、喷气孔;72、顶杆;73、活塞头;8、分拣滑块;81、空腔;82、气泵;83、排料口;84、螺纹杆;85、从动齿轮;9、伺服电机;91、主动齿轮。
实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-图9所示,在一个实施例中,提供了一种猕猴桃果实自动摘取机,包括车体1和安装在车体1上的机械臂2;
安装在机械臂2上的摘取筒4,摘取筒4上安装有视觉传感器42,摘取筒4内设有柔性夹持组件,用于对猕猴桃进行夹持;
设于摘取筒4上的挡杆组件,用于对猕猴桃枝柄进行阻挡限位;
滑动连接在车体1内的泵气组件,泵气组件通过波纹管41与摘取筒4相连通,用于对猕猴桃进行除尘和减缓其下落速度;
设于车体1内的分拣组件,用于对不同重量的猕猴桃进行分拣存放。
通过上述技术方案,本实施例中通过视觉传感器42和机械臂2配合将摘取筒4套至待摘取的猕猴桃周围,泵气组件通过摘取筒4持续喷出气体对猕猴桃底部及周围进行除尘,然后通过柔性夹持组件对该猕猴桃进行柔性夹持,以避免对猕猴桃夹持过程中造成损坏,并通过挡杆组件对此猕猴桃的枝柄进行阻挡限位,然后机械臂2驱动摘取筒4以挡杆组件的档杆为转动轴进行转动,从而使猕猴桃从其枝柄上脱离,再取消对猕猴桃的柔性夹持,使猕猴桃在其自重下沿波纹管41滑落,滑落过程中波纹管41内持续向上的气流可减缓猕猴桃落下的速度,以保证猕猴桃落入车体1内不会因碰撞而致果肉软烂,猕猴桃落入分拣组件后,分拣组件会根据猕猴桃的不同重量进行分拣存放。
作为本发明的一种实施方式,请参阅图1-图6所示,柔性夹持组件包括环状气囊44,环状气囊44固定连接在摘取筒4内壁上;
摘取筒4底端连通有锥形筒46,锥形筒46底端与波纹管41相连通,锥形筒46侧壁上连通有第一导气管45,第一导气管45远离锥形筒46的一端与环状气囊44相连通,第一导气管45内安装有压力阀451。
进一步地,摘取筒4靠近底端的侧壁上固定连接有收纳盒43,收纳盒43内滑动连接有封堵板431,封堵板431上安装有压力传感器432,摘取筒4内开设有与封堵板431相对应的封堵滑槽;
收纳盒43内固定连接有电动伸缩杆,电动伸缩杆伸缩端与封堵板431固定连接。
通过上述技术方案,当视觉传感器42检测到摘取筒4套至猕猴桃周围后,可控制收纳盒43内的电动伸缩杆启动将封堵板431从收纳盒43内顶动滑出,直至封堵板431对摘取筒4进行完全封堵,此时持续从波纹管41内向上流动的空气被封堵板431封堵后会导致波纹管41及锥形筒46内气压增大,从而可使锥形筒46内的空气突破压力阀451的阻挡经第一导气管45进入环状气囊44内,从而使环状气囊44膨胀以达到对位于摘取筒4内猕猴桃进行柔性夹持的目的,需要说明的是,环状气囊44为弹性气囊,可保证其未充气状态可自动收缩,避免对摘取套摘取筒4套至猕猴桃周围时进行干涉,锥形筒46的底端开口及波纹管41内径均小于摘取筒4的内径,可保证经波纹管41流入锥形筒46和摘取筒4的气流速度会减小,在摘取筒4套至猕猴桃周围时减小的气流不会对猕猴桃进行大幅度吹动,避免摘取筒4无法准确套至猕猴桃周围,而猕猴桃在摘取完成后在其自重落下过程中,因波纹管41内径变小,气流在波纹管41内流动时流速会增大,从而会对经波纹管41滑落的猕猴桃产生较大的反向作用力,如此可达到对猕猴桃下落速度充分减缓的目的。
进一步地,挡杆组件包括活塞筒5,活塞筒5固定连接在摘取筒4上,活塞筒5内滑动连接有活塞头73,活塞头73上固定连接有顶杆72,顶杆72远离活塞头73一端上固定连接有中空挡杆7;
环状气囊44通过第二导气管51与活塞筒5相连通,活塞筒5内设有拉簧53,拉簧53两端分别与活塞筒5和活塞头73固定连接。
进一步地,活塞筒5靠近中空挡杆7方向的侧壁上连通有导气软管52,导气软管52远离活塞筒5一端与中空挡杆7相连通,中空挡杆7上开设有开口朝下的喷气孔71。
通过上述技术方案,当环状气囊44被空气充满膨胀时,多余的空气会经第二导气管51进入活塞筒5内,并克服拉簧53的拉力将活塞头73向远离拉簧53的方向推动,如此即可通过顶杆72带动中空挡杆7向猕猴桃枝柄位置移动,直至中空挡杆7与猕猴桃枝柄接触并移动至摘取筒4轴心附近时停止,并且此时进入活塞筒5内的空气会通过导气软管52进入中空挡杆7内,并通过开设在中空挡杆7上的喷气孔71喷出,从而对猕猴桃的上表面进行吹风除尘。
进一步地,摘取筒4靠近机械臂2方向的侧壁上固定连接有泄气管6,泄气管6与环状气囊44相连通,泄气管6上连通有开口向下的朝向管64;
泄气管6内滑动连接有滑动杆61,滑动杆61上开设有通气槽62,通气槽62内壁上开设有开口向下的通孔63,通孔63与朝向管64相配合;
泄气管6内固定连接有挡环65,挡环65上固定连接有弹簧66,弹簧66远离挡环65的一端与滑动杆61固定连接,机械臂2上固定连接有与滑动杆61相配合的顶块21。
通过上述技术方案,当位于摘取筒4内的猕猴桃被充分夹持并且中空挡杆7对其枝柄进行限位抵挡后,机械臂2驱动摘取筒4以中空挡杆7为转动轴进行转动,此时猕猴桃在摘取筒4的带动下绕中空挡杆7转动,从而使猕猴桃枝柄和猕猴桃连接处产生较大的拉力,进而使猕猴桃和猕猴桃枝柄相脱离,从而完成对该猕猴桃的摘取,当摘取筒4转动至滑动杆61与顶块21相抵时,顶块21会对滑动杆61进行顶动,从而使滑动杆61克服弹簧66的弹力作用下向泄气管6内滑动,直至开设在滑动杆61上的通孔63与朝向管64相连通时,环状气囊44和活塞筒5内的空气分别会在自身弹力和拉簧53拉力作用下经泄气管6、通气槽62、通孔63和朝向管64排出,环状气囊44和活塞筒5复位,进而取消对已摘取猕猴桃的柔性夹持,猕猴桃在其自重作用下沿环状气囊44滑落至封堵板431上的压力传感器432上,压力传感器432对该猕猴桃进行承重记录并反馈,然后控制收纳盒43内的电动伸缩杆收缩将封堵板431收回,此时封堵板431上方的猕猴桃会沿锥形筒46和波纹管41滑动落下,而此时波纹管41内的空气又会通过锥形筒46持续向外流动,从而可对该猕猴桃进行一定程度的减缓其下落速度,避免猕猴桃滑落至车体1内时因动能过大,导致碰撞力度过大而致猕猴桃果肉软烂,从而避免了猕猴桃在自重作用下沿导管收集的猕猴桃可能因碰撞而导致果肉软烂的问题,需要说明的是每次环状气囊44内气体被泄出时摘取筒4的倾斜角度均为固定值,猕猴桃沿环状气囊44滑落至压力传感器432上时的角度也为固定的,此时压力传感器432上检测到猕猴桃的重量虽然不是其所有重量,但是根据此时猕猴桃的倾斜角度和压力传感器432上检测的压力即可获得猕猴桃的重量。
作为本发明的一种实施方式,请参阅图7-图9所示,泵气组件包括分拣滑块8,分拣滑块8滑动连接在车体1内,分拣滑块8内开设有空腔81,空腔81与波纹管41底端相连通,分拣滑块8一侧固定连接有气泵82,气泵82输出端与空腔81相连通,气泵82可持续将空气充入空腔81内,空腔81内的空气会持续通过波纹管41向上流动。
进一步地,分拣组件包括螺纹杆84,螺纹杆84转动连接在车体1内,分拣滑块8螺纹连接在螺纹杆84上且底部与车体1内壁相贴合,螺纹杆84一端固定连接有从动齿轮85;
车体1内固定连接有伺服电机9,伺服电机9输出端上固定连接有主动齿轮91,主动齿轮91与从动齿轮85相啮合。
进一步地,车体1内通过挡板13和隔板15分隔成三个存放腔12,挡板13上开设有与各个存放腔12相对应的进料口,进料口上转动连接有配重板14;
空腔81侧壁上开设有排料口83,排料口83与进料口相配合;
车体1上转动连接有卸货门3,用于对三个存放腔12进行封堵,卸货门3上开设有多个通气孔31,车体1上转动连接有锁扣11,锁扣11与卸货门3相配合。
通过上述技术方案,当摘取的猕猴桃经波纹管41落入空腔81后,根据压力传感器432获得的重量,控制伺服电机9工作带动主动齿轮91转动,从而带动从动齿轮85及螺纹杆84转动,因分拣滑块8螺纹连接在螺纹杆84上且分拣滑块8底部与车体1内壁相贴合,所以螺纹杆84转动过程中可驱动分拣滑块8在螺纹杆84方向上移动,使排料口83与需要存放的存放腔12的配重板14相对齐,当摘取筒4对第二个猕猴桃进行摘取过程中,封堵板431对摘取筒4进行封堵时,波纹管41和空腔81内气压会增大,此时空腔81内的气压会顶动此时与其相对应存放腔12的配重板14,从而使部分空气进入该存放腔12内,此时进入存放腔12内的气流会带动放置在空腔81内的猕猴桃滚动至该存放腔12内,进入存放腔12内的气流也会经通气孔31排出,以保证可将该猕猴桃充分的推入存放腔12内,当摘取第二个猕猴桃过程中,封堵板431收纳会收纳盒43后,波纹管41的空气可经摘取筒4快速排出,波纹管41及空腔81内气压降低,配重板14可在其自重作用下转动复位。
请参阅图1-图9所示,提供了一种猕猴桃果实自动摘取机的使用方法,具有以下步骤;
第一步:启动车体1和气泵82,车体1移动至待摘取的猕猴桃下方,机械臂2驱动摘取筒4向猕猴桃方向靠近,经视觉传感器42的定位精准的将摘取筒4套至猕猴桃周围,气泵82通过波纹管41、摘取筒4输送的空气对猕猴桃底部及周围表面进行除尘;
第二步:控制封堵板431移动对摘取筒4底端进行封堵,气泵82输送的空气对环状气囊44和活塞筒5进行充气,环状气囊44对摘取筒4内猕猴桃进行柔性夹持,活塞筒5内活塞头73滑动推动中空挡杆7对此猕猴桃枝柄进行限定阻挡,然后喷气孔71喷出的空气对猕猴桃上表面进行除尘;
第三步:机械臂2驱动摘取筒4转动对猕猴桃进行摘取,顶块21对滑动杆61进行顶动,环状气囊44和活塞筒5内空气通过泄气管6排出,猕猴桃自重落至压力传感器432上,对猕猴桃重量进行测量并控制封堵板431收缩,猕猴桃经波纹管41落入分拣滑块8内,波纹管41内气流对猕猴桃下落速度进行降低;
第四步:分拣滑块8移动至对应存放腔12进料口出,摘取筒4对下一个猕猴桃柔性夹持时,封堵板431对摘取筒4封堵,波纹管41及分拣滑块8内气压上升,顶动配重板14转动打开,气流推动分拣滑块8内猕猴桃进入对应存放腔12内。
以上对本发明的一个实施例进行了详细说明,但内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 一种自动中板齿接定尺剪切机及其使用方法
- 一种磁吸式自动套袋机及其使用方法
- 一种自动化高效环保设备用毛条机的使用方法
- 一种自动端子机及其使用方法
- 一种自动化多片式桥梁拼组的造桥机装置及其使用方法
- 一种软枣猕猴桃果实摘取装置
- 一种猕猴桃果实用自动套袋机