一种实验室样本配送调度方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及配送调度技术领域,具体为一种实验室样本配送调度方法。
背景技术
实验室样本配送时常在大量的样本配送方面需要运用到配送车来进行配送,在于实验室样本存储仓库之间进行联网运行期间,可以根据对配送样本过程的线路优化和储存状态来获取最高效的实验室样本配送调度方法。
例如现有的 CN202111069472.9 一种联合配送方法及装置,其技术方案要点是:包括以下步骤:获取所有配送终端的配送状态信息,所述配送状态信息包括有运动状态信息、当前位置信息以及第一配送方向信息;获取新的配送请求信息,所述新的配送请求信息包括有源站点位置信息以及第二配送方向信息;根据所述所有配送终端的配送状态信息以及所述新的配送请求信息划分所有所述配送终端的优先级,并将所述新的配送请求信息发送至优先级最高的所述配送终端。本申请提供的一种联合配送方法及装置具有减少配送路径、降低功耗、利用率高以及提高安全性的优点。
上述的一种联合配送方法及装置通过获取所有配送终端的配送状态信息以及新的配送请求信息,结合配送状态信息以及新的配送请求信息来划分配送终端的优先级,由优先级最高的配送终端来执行新的配送请求,但是其并没有根据配送目的地的装卸货时间来进一步优化配送路径,针对上述情况,我们推出了一种实验室样本配送调度方法。
发明内容
针对现有技术的不足,本发明提供了一种实验室样本配送调度方法,解决了上述背景技术中提出的问题。
为实现以上目的,本发明通过以下技术方案予以实现:一种实验室样本配送调度方法,包括数台用于实验室样品配送用的配送车和用于储存实验室样本的无人值守的储仓,以及用于对实验室样品配送过程进行调度的控制系统,所述配送车上载有装载量感知单元,所述储仓内安置有多组用于储存实验室样本的储货架,所述控制系统与人工控制系统联机运行;
所述配送车的载物台上通信连接有装载量感知单元,且所述配送车的车身四周均分布有用于在行进过程中进行距离感应的距离感应单元,所述所述配送车上还搭载有与所述控制系统之间保持通信连接的通信系统;
所述储仓预留有方便所述配送车进出的进出口,且所述储货架的架体上安装有用于对样品储存情况进行感知的货架装载量感知单元,以及对所述配送车的载物台上装载的实验室样本进行取放的机械手臂;
所述储仓的地面上预埋有用于引导所述配送车行进且具有感应功能的配送路径,所述配送路径内嵌设有位置动态感应单元,且在所述配送路径的每个拐点处均设置有位置感应节点,并且所述位置感应节点以及所述位置动态感应单元与所述控制系统之间均保持通讯连接;
所述储仓内另设有呈网格状分布的纵横定位网格,且所述纵横定位网格的每个交叉点处均由顶部设置的投光器以及地面铺设的受光器组成;
所述控制系统与所述人工控制系统之间进行数据同步共享,且在对所述配送车的运行状态进行改变时,所述人工控制系统的优先级系数大于所述控制系统的优先级系数,并且各感应单元采集的数据优先与所述控制系统中的预装数据进行比对。
进一步的,包括以下步骤:
步骤一:所述配送车在装载实验室样本后,其以所述储仓预留的进出口为起点,以所述配送路径为行进基准线进行样本配送,所述配送车的实验室样本装载量由所述装载量感知单元感知并反馈至所述控制系统;
步骤二:利用配送路径内嵌设的位置动态感应单元将所述配送车沿着所述配送路径的行进轨迹以及行进速度进行数据采集,并将所采集的数据传输至所述控制系统,并与所述控制系统内的预装数据进行比对;
步骤三:在所述配送车沿着所述配送路径行进过程中,利用所述纵横定位网格的节点内设置的投光器和受光器感知的感光变化来估算所述配送车的行进时的偏移量,将所述配送车行进的偏移量进行反馈至所述控制系统内,并将偏移量与所述控制系统内的预装数据进行比对并进行纠偏操作;
步骤四:利用所述配送路径的每个拐点处均设置的位置感应节点以及所述位置动态感应单元将所述配送路径上所感应到的所述配送车的数量反馈至所述控制系统,所述控制系统利用所述装载量感知单元反馈的所述配送车的装载量和所述储货架上设置的货架装载量感知单元反馈的所述储货架的储存量与预装数据进行比对,并估算沿着不同路径进行时间和并等待前一辆所述配送车的摆放实验室样品的时间以及等待将这一辆所述配送车上装载的实验室样品摆放至所述储货架的的摆放时间,并计算出对应的里程值;
步骤五:将所计算的各个里程值从大到小进行排序,根据最小里程值的配送路线优选为最佳配送路线,并将最佳配送路线经所述通信系统下发给所述配送车,引导所述配送车进行实验室样本配送;
步骤六:当所述配送车的行进路径出现偏差时的偏差率较之于所述控制系统内的预装数据中允许的最大偏差率相比呈现持续上升趋势,且经由所述控制系统进行纠偏后,仍无法进行校正时,所述人工控制系统优先启用并介入控制。
本发明提供了一种实验室样本配送调度方法,具备以下有益效果:
本申请配送车的载物台上通信连接有装载量感知单元,且配送车的车身四周均分布有用于在行进过程中进行距离感应的距离感应单元,方便配送车感知与周围物体之间的相对距离,并方便控制系统实时把控配送车的运行状态,预防出现碰撞事故;
本申请储货架的架体上安装有用于对样品储存情况进行感知的货架装载量感知单元,根据货架装载量感知单元实时反馈货架的可装载量,及时引导控制系统进行配送路径的优化;
本申请储仓的地面上预埋有用于引导配送车行进且具有感应功能的配送路径,配送路径内嵌设有位置动态感应单元,利用位置动态感应单元感知配送路径上的每个配送车的具体动态位置,进而把控配送车的运行速度等参数,且在配送路径的每个拐点处均设置有位置感应节点,利用位置感应节点对应的实时数据来判断对应的配送路径上的配送车的运行数量等具体参数;
本申请的控制系统利用装载量感知单元反馈的配送车的装载量和储货架上设置的货架装载量感知单元反馈的储货架的储存量与预装数据进行比对,并估算沿着不同路径进行时间和并等待前一辆配送车的摆放实验室样品的时间以及等待将这一辆配送车上装载的实验室样品摆放至储货架的的摆放时间,并计算出对应的里程值。
附图说明
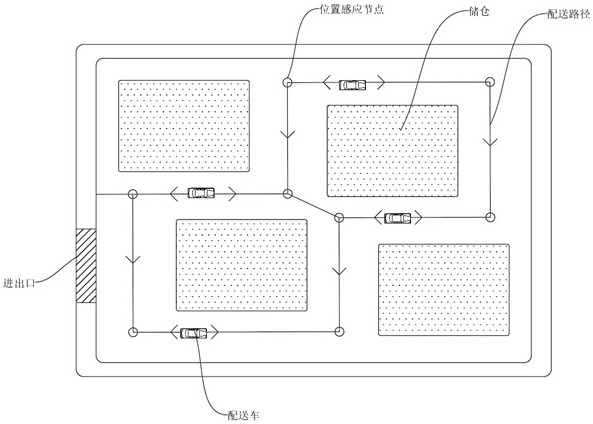
图1为本发明一种实验室样本配送调度方法的配送路径示意图;
图2为本发明一种实验室样本配送调度方法的纵横定位网格示意图;
图3为本发明一种实验室样本配送调度方法的控制系统的流程示意图。
具体实施方式
请参阅图1、图2和图3,本发明提供一种技术方案:一种实验室样本配送调度方法,包括数台用于实验室样品配送用的配送车和用于储存实验室样本的无人值守的储仓,以及用于对实验室样品配送过程进行调度的控制系统,配送车上载有装载量感知单元,储仓内安置有多组用于储存实验室样本的储货架,控制系统与人工控制系统联机运行;
配送车的载物台上通信连接有装载量感知单元,且配送车的车身四周均分布有用于在行进过程中进行距离感应的距离感应单元,方便配送车感知与周围物体之间的相对距离,并方便控制系统实时把控配送车的运行状态,预防出现碰撞事故,配送车上还搭载有与控制系统之间保持通信连接的通信系统,利用通信系统与控制系统之间实时保持通讯;
储仓预留有方便配送车进出的进出口,且储货架的架体上安装有用于对样品储存情况进行感知的货架装载量感知单元,根据货架装载量感知单元实时反馈货架的可装载量,及时引导控制系统进行配送路径的优化,以及对配送车的载物台上装载的实验室样本进行取放的机械手臂,对配送车上的实验室样本进行取放;
储仓的地面上预埋有用于引导配送车行进且具有感应功能的配送路径,配送路径内嵌设有位置动态感应单元,利用位置动态感应单元感知配送路径上的每个配送车的具体动态位置,进而把控配送车的运行速度等参数,且在配送路径的每个拐点处均设置有位置感应节点,利用位置感应节点对应的实时数据来判断对应的配送路径上的配送车的运行数量等具体参数,并且位置感应节点以及位置动态感应单元与控制系统之间均保持通讯连接;
储仓内另设有呈网格状分布的纵横定位网格,且纵横定位网格的每个交叉点处均由顶部设置的投光器以及地面铺设的受光器组成,利用投光器与受光器之间是否被遮挡来细化配送车的具体偏移量,生成具体的对应的坐标位置;
控制系统与人工控制系统之间进行数据同步共享,且在对配送车的运行状态进行改变时,人工控制系统的优先级系数大于控制系统的优先级系数,即使控制系统对配送车的校正出现不足的情况,可以人工介入来利用人工控制系统进行纠偏,并且各感应单元采集的数据优先与控制系统中的预装数据进行比对。
实验室样本配送调度方法包括以下步骤:
步骤一:配送车在装载实验室样本后,其以储仓预留的进出口为起点,以配送路径为行进基准线进行样本配送,配送车的实验室样本装载量由装载量感知单元感知并反馈至控制系统;
步骤二:利用配送路径内嵌设的位置动态感应单元将配送车沿着配送路径的行进轨迹以及行进速度进行数据采集,并将所采集的数据传输至控制系统,并与控制系统内的预装数据进行比对;
步骤三:在配送车沿着配送路径行进过程中,利用纵横定位网格的节点内设置的投光器和受光器感知的感光变化来估算配送车的行进时的偏移量,将配送车行进的偏移量进行反馈至控制系统内,并将偏移量与控制系统内的预装数据进行比对并进行纠偏操作;
步骤四:利用配送路径的每个拐点处均设置的位置感应节点以及位置动态感应单元将配送路径上所感应到的配送车的数量反馈至控制系统,控制系统利用装载量感知单元反馈的配送车的装载量和储货架上设置的货架装载量感知单元反馈的储货架的储存量与预装数据进行比对,并估算沿着不同路径进行时间和并等待前一辆配送车的摆放实验室样品的时间以及等待将这一辆配送车上装载的实验室样品摆放至储货架的的摆放时间,并计算出对应的里程值;
步骤五:将所计算的各个里程值从大到小进行排序,根据最小里程值的配送路线优选为最佳配送路线,并将最佳配送路线经通信系统下发给配送车,引导配送车进行实验室样本配送;
步骤六:当配送车的行进路径出现偏差时的偏差率较之于控制系统内的预装数据中允许的最大偏差率相比呈现持续上升趋势,且经由控制系统进行纠偏后,仍无法进行校正时,人工控制系统优先启用并介入控制。
综上,该实验室样本配送调度方法,使用时,首先将实验室样本装载于配送车的载物台上,实验室样本的装载量经由装载量感知单元发送至控制系统控制,沿着储仓的进出口发车,在配送车沿着配送路径行驶的同时,配送车的车身四周均分布的用于在行进过程中进行距离感应的距离感应单元和配送车上还搭载的与控制系统之间保持通信连接的通信系统,将配送车的事实运行状态反馈至控制系统,而在配送路径上内嵌设有位置动态感应单元,将各组配送车实际运行的位置信息进一步反馈至控制系统,并且,控制系统根据在配送路径的每个拐点处均设置的位置感应节点,实时把握每条路径上的配送车的状态,而且控制系统利用装载量感知单元反馈的配送车的装载量和储货架上设置的货架装载量感知单元反馈的储货架的储存量与预装数据进行比对,并估算沿着不同路径进行时间和并等待前一辆配送车的摆放实验室样品的时间以及等待将这一辆配送车上装载的实验室样品摆放至储货架的的摆放时间,并计算出对应的里程值,将所计算的各个里程值从大到小进行排序,根据最小里程值的配送路线优选为最佳配送路线,并将最佳配送路线经通信系统下发给配送车,引导配送车进行实验室样本配送,一旦经过配送车运行时出现偏移,纵横定位网格的节点内设置的投光器和受光器感知的感光变化来估算配送车的行进时的偏移量,将配送车行进的偏移量进行反馈至控制系统内,并将偏移量与控制系统内的预装数据进行比对并进行纠偏操作,一旦配送车的偏移量超过控制系统中的最大允许偏移量时,经控制系统介入纠偏后仍不能校正的,则人工控制系统优先启用并对配送车介入控制。
- 一种配送调度方法及装置
- 一种应用于物流配送中心的车辆分配过程的优化调度方法
- 一种基于变模式分解和样本熵理论的综合能源系统优化调度方法
- 一种基于样本熵的新能源电力系统优化调度方法
- 一种无人实验室样本配送AGV小车
- 一种样本调度系统及样本调度方法