一种市政工程路面平整度检测及平整机器人
文献发布时间:2024-04-18 19:48:15
技术领域
本发明涉及路面平整度检测技术领域,具体为一种市政工程路面平整度检测及平整机器人。
背景技术
道路工程是指以道路为对象而进行的规划、设计、施工、养护与管理工作的全过程及其所从事的工程实体。随着我国公路事业的不断的发展和进步,对于公路平整度的要求也越来越高,由于在施工中存在一些问题,路基路面会出现不同程度的起伏,在路面的验收过程中,需要对路面的平整度进行检查。这时就需要使用到路面平整度检测装置,但是现有的路面平整度检测装置仅能进行检测,无法对所检测到的不平整道路进行进一步处理,如将凸块去除掉或将坑洼填平,这就导致仍然不便于车辆在该路段进行行驶。因此,发明一种市政工程路面平整度检测及平整机器人。
发明内容
鉴于上述和/或现有一种市政工程路面平整度检测及平整机器人中存在的问题,提出了本发明。
因此,本发明的目的是提供一种市政工程路面平整度检测及平整机器人,能够解决上述提出现有的问题。
为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
一种市政工程路面平整度检测及平整机器人,其包括车体,还包括:
用于对市政工程路面的平整度进行检测的检测组件;
用于对所检测到的凸块进行铲除收集的凸块去除组件;
用于对所检测到的坑洼进行填平的填充组件;
用于使凸块去除组件和填充组件进行多方位移动的XYZ轴移动组件,且车体上安装两组XYZ轴移动组件,一组所述XYZ轴移动组件上安装凸块去除组件,另一组所述XYZ轴移动组件上安装填充组件。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述车体包括:
承载板;
通孔,所述通孔开设在承载板的中端内壁上;
收集盒,所述收集盒固定安装在通孔的内壁上;
承载杆,所述承载板的顶部固定安装若干承载杆;
顶板,所述顶板的底部固定安装若干承载杆;
车轮,所述承载板的两端均设有两组车轮;
L形板,所述L形板固定安装在承载板的左侧上。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述检测组件包括:
摄像头,用于对市政工程路面的图像进行采集,且摄像头安装在L形板上;
储存模块,用于储存各种市政工程路面不平整的图像数据;
比对模块,用于将摄像头所采集的图像与储存模块中所储存的图像进行对比;
中央处理器,用于判断摄像头所采集的图像是否在储存模块中存在;
尺寸获取模块,用于对不平整的路面尺寸进行计算;
发送模块,用于将不平整的路面图像及尺寸发送给工作人员;
其中,具体的:
所述摄像头与所述比对模块相连接,所述比对模块与所述储存模块相连接,所述比对模块与所述中央处理器相连接,所述中央处理器与所述尺寸获取模块相连接,所述尺寸获取模块与所述发送模块相连接。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述XYZ轴移动组件包括:
两组第一侧板,所述第一侧板固定安装在顶板的底部上;
第一螺杆,所述第一螺杆通过轴承转动连接在两组第一侧板之间;
第一滑块,所述第一滑块螺纹连接在第一螺杆上;
第一支撑板,所述第一支撑板固定安装在第一滑块的底部上;
第一导向杆,所述第一导向杆固定安装在两组第一侧板之间,且第一滑块的内壁滑动连接第一导向杆;
第一伺服电机,所述第一伺服电机固定安装在一组第一侧板上,且第一伺服电机的输出轴与第一螺杆固定连接;
第二侧板,所述第一支撑板的底部两侧均固定安装第二侧板;
第二螺杆,所述第二螺杆通过轴承转动连接在两组第二侧板之间;
第二滑块,所述第二滑块螺纹连接在第二螺杆上;
第二支撑板,所述第二支撑板固定安装在第二滑块的底部上;
第二导向杆,所述第二导向杆固定安装在两组第二侧板之间,且第二滑块的内壁滑动连接第二导向杆;
第二伺服电机,所述第二伺服电机固定安装在一组第二侧板上,且第二伺服电机的输出轴与第二螺杆固定连接;
第一盒体,所述第一盒体固定安装在第二支撑板的底部上;
第一电动推杆,所述第一电动推杆固定安装在第一盒体的内壁上,左侧所述第一电动推杆中的活塞杆安装凸块去除组件,右侧所述第一电动推杆中的活塞杆安装填充组件。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述凸块去除组件包括:
第一固定板,左侧所述第一电动推杆中的活塞杆固定安装第一固定板;
铲除组件,所述铲除组件安装在第一固定板的底部左侧上;
扫帚组件,所述扫帚组件安装在第一固定板的底部中端上;
簸箕组件,所述簸箕组件安装在第一固定板的底部右侧上。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述铲除组件包括:
第一支撑板,所述第一固定板的底部左侧两端均固定安装第一支撑板;
第一转轴,所述第一转轴通过轴承转动连接在两组第一支撑板之间;
第一旋转板,所述第一旋转板固定安装在第一转轴上;
第三伺服电机,所述第三伺服电机固定安装在一组第一支撑板上,且第三伺服电机的输出轴与第一转轴固定连接;
刀片,所述刀片固定安装在第一旋转板的一侧上。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述扫帚组件包括:
第三侧板,所述第一固定板的底部中端两侧均固定安装第三侧板;
第三螺杆,所述第三螺杆通过轴承转动连接在两组第三侧板之间;
第三滑块,所述第三滑块螺纹连接在第三螺杆上;
第三导向杆,所述第三导向杆固定安装在两组第三侧板之间,且第三滑块的内壁滑动连接第三导向杆;
第五伺服电机,所述第五伺服电机固定安装在一组第三侧板上,且第五伺服电机的输出轴与第三螺杆固定连接;
第二支撑板,所述第三滑块的底部两端均固定安装第二支撑板;
第二转轴,所述第二转轴通过轴承转动连接在两组第二支撑板之间;
第二旋转板,所述第二旋转板固定安装在第二转轴上;
第六伺服电机,所述第六伺服电机固定安装在一组第二支撑板上,且第六伺服电机的输出轴与第二转轴固定连接;
扫帚,所述扫帚固定安装在第二旋转板的一侧上。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述簸箕组件包括:
第三支撑板,所述第一固定板的底部右侧两端均固定安装第三支撑板;
第三转轴,所述第三转轴通过轴承转动连接在两组第三支撑板之间;
第三旋转板,所述第三旋转板固定安装在第三转轴上;
第七伺服电机,所述第七伺服电机固定安装在一组第三支撑板上,且第七伺服电机的输出轴与第三转轴固定连接;
连接块,所述连接块固定安装在第一旋转板的一侧上;
簸箕,所述簸箕固定安装在连接块的一侧上。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述填充组件包括:
第二固定板,左侧所述第一电动推杆中的活塞杆固定安装第二固定板;
空心管,所述空心管固定安装在第二固定板的右侧内壁上;
泥浆泵,所述泥浆泵固定安装在承载板的顶部右侧上,且泥浆泵的输出端与空心管通过管道相连通;
用于储存泥浆的储存箱,所述储存箱固定安装在承载板的顶部右侧上,且储存箱与泥浆泵的输入端通过管道相连通。
作为本发明所述的一种市政工程路面平整度检测及平整机器人的一种优选方案,其中:所述填充组件还包括:
第二盒体,所述第二盒体固定安装在第二固定板的左侧底部上;
第二电动推杆,所述第二电动推杆固定安装在第二盒体的内壁上;
下压板,所述第二电动推杆中的活塞杆固定安装下压板。
与现有技术相比:
1.通过设置检测组件对市政工程路面的平整度进行检测,通过设置凸块去除组件对所检测到的凸块进行处理,通过设置填充组件对所检测到的坑洼进行处理,具有能够实现对所检测到的不平整道路进行及时处理,进而会便于车辆在该路段进行行驶,提高了效率;
2.通过设置铲除组件对依附在路面上的杂质进行铲除,通过设置扫帚组件和簸箕组件对未依附在路面上的杂质进行清理,具有能够实现对路面上的杂质进行清理及收集的作用,进而会确保路面的平整性;
3.通过设置填充组件,具有能够实现对所检测到的坑洼进行填平的作用,通过对所检测到的坑洼进行填平,具有进一步确保路面的平整性。
附图说明
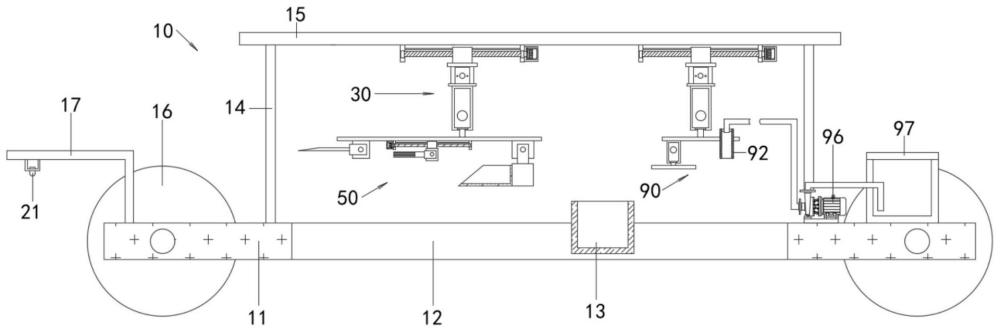
图1为本发明结构正视示意图;
图2为本发明车体结构示意图;
图3为本发明XYZ轴移动组件正视示意图;
图4为本发明XYZ轴移动组件仰视示意图;
图5为本发明L形板结构示意图;
图6为本发明凸块去除组件正视示意图;
图7为本发明铲除组件局部结构俯视示意图;
图8为本发明扫帚组件局部结构俯视示意图;
图9为本发明簸箕组件局部结构俯视示意图;
图10为本发明填充组件局部结构正视示意图;
图11为本发明检测组件流程示意图。
图中:车体10、承载板11、通孔12、收集盒13、承载杆14、顶板15、车轮16、L形板17、检测组件20、摄像头21、比对模块22、储存模块23、中央处理器24、尺寸获取模块25、发送模块26、XYZ轴移动组件30、第一侧板31、第一螺杆32、第一滑块33、第一导向杆34、第一伺服电机35、第一支撑板36、第二侧板37、第二螺杆38、第二滑块39、第二导向杆40、第二伺服电机41、第二支撑板42、第一盒体43、第一电动推杆44、凸块去除组件50、第一固定板51、铲除组件60、第一支撑板61、第一转轴62、第一旋转板63、第三伺服电机64、刀片66、扫帚组件70、第三侧板71、第三螺杆72、第三滑块73、第三导向杆74、第五伺服电机75、第二支撑板76、第二转轴77、第二旋转板78、扫帚781、第六伺服电机79、簸箕组件80、第三支撑板81、第三转轴82、第三旋转板83、连接块84、簸箕85、第七伺服电机86、填充组件90、第二固定板91、空心管92、第二盒体93、第二电动推杆94、下压板95、泥浆泵96、储存箱97。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
本发明提供一种市政工程路面平整度检测及平整机器人,请参阅图1-图11,包括车体10,还包括:用于对市政工程路面的平整度进行检测的检测组件20、用于对所检测到的凸块进行铲除收集的凸块去除组件50、用于对所检测到的坑洼进行填平的填充组件90、用于使凸块去除组件50和填充组件90进行多方位移动的XYZ轴移动组件30;
且车体10上安装两组XYZ轴移动组件30,一组XYZ轴移动组件30上安装凸块去除组件50,另一组XYZ轴移动组件30上安装填充组件90。
车体10包括:承载板11、通孔12、收集盒13、承载杆14、顶板15、车轮16、L形板17;
通孔12开设在承载板11的中端内壁上,承载板11上设有用于对检测组件20、凸块去除组件50、填充组件90和XYZ轴移动组件30进行供电的蓄电池,收集盒13固定安装在通孔12的内壁上,承载板11的顶部固定安装若干承载杆14,顶板15的底部固定安装若干承载杆14,承载板11的两端均设有两组车轮16,L形板17固定安装在承载板11的左侧上。
检测组件20包括:摄像头21,用于对市政工程路面的图像进行采集,且摄像头21安装在L形板17上、储存模块23,用于储存各种市政工程路面不平整的图像数据、比对模块22,用于将摄像头21所采集的图像与储存模块23中所储存的图像进行对比、中央处理器24,用于判断摄像头21所采集的图像是否在储存模块23中存在、尺寸获取模块25,用于对不平整的路面尺寸进行计算、发送模块26,用于将不平整的路面图像及尺寸发送给工作人员;
摄像头21与比对模块22相连接,比对模块22与储存模块23相连接,比对模块22与中央处理器24相连接,中央处理器24与尺寸获取模块25相连接,尺寸获取模块25与发送模块26相连接;
工作原理:使车体10如图1所示,自左向右进行移动,在车体10移动时,则会通过摄像头21对市政工程路面的图像进行采集,采集后,则会通过比对模块22将摄像头21所采集的图像与储存模块23中所储存的图像进行对比,对比后,则会通过中央处理器24判断摄像头21所采集的图像是否在储存模块23中存在,若是存在,则会通过尺寸获取模块25对不平整的路面尺寸进行计算,若是凸块,则不计算,若是坑洼,则获取其容量,过后,则会通过发送模块26将不平整的路面图像及尺寸发送给工作人员,以让工作人员判断该不平整路面是否能够进行处理,若是不能进行处理则进行标记,若是能够处理则通过凸块去除组件50和填充组件90进行处理。
XYZ轴移动组件30包括:两组第一侧板31、第一螺杆32、第一滑块33、第一导向杆34、第一伺服电机35、第一支撑板36、第二侧板37、第二螺杆38、第二滑块39、第二导向杆40、第二伺服电机41、第二支撑板42、第一盒体43、第一电动推杆44;
第一侧板31固定安装在顶板15的底部上,第一螺杆32通过轴承转动连接在两组第一侧板31之间,第一滑块33螺纹连接在第一螺杆32上,第一支撑板36固定安装在第一滑块33的底部上,第一导向杆34固定安装在两组第一侧板31之间,且第一滑块33的内壁滑动连接第一导向杆34,第一伺服电机35固定安装在一组第一侧板31上,且第一伺服电机35的输出轴与第一螺杆32固定连接,第一支撑板36的底部两侧均固定安装第二侧板37,第二螺杆38通过轴承转动连接在两组第二侧板37之间,第二滑块39螺纹连接在第二螺杆38上,第二支撑板42固定安装在第二滑块39的底部上,第二导向杆40固定安装在两组第二侧板37之间,且第二滑块39的内壁滑动连接第二导向杆40,第二伺服电机41固定安装在一组第二侧板37上,且第二伺服电机41的输出轴与第二螺杆38固定连接,第一盒体43固定安装在第二支撑板42的底部上,第一电动推杆44固定安装在第一盒体43的内壁上,左侧第一电动推杆44中的活塞杆安装凸块去除组件50,右侧第一电动推杆44中的活塞杆安装填充组件90;
工作原理:通过第一伺服电机35使第一螺杆32进行旋转,当第一螺杆32旋转时,则会在第一滑块33的作用下带动第一电动推杆44左右移动,此时,通过第二伺服电机41使第二螺杆38进行旋转,当第二螺杆38旋转时,则会在第二滑块39的作用下带动第一电动推杆44前后移动,直至使第一电动推杆44位于合适的位置,然后,使第一电动推杆44进行升降,以实现能够对凸块去除组件50和填充组件90的位置进行调节。
凸块去除组件50包括:第一固定板51、铲除组件60、扫帚组件70、簸箕组件80;
左侧第一电动推杆44中的活塞杆固定安装第一固定板51,铲除组件60安装在第一固定板51的底部左侧上,扫帚组件70安装在第一固定板51的底部中端上,簸箕组件80安装在第一固定板51的底部右侧上;
铲除组件60包括:第一支撑板61、第一转轴62、第一旋转板63、第三伺服电机64、刀片66;
第一固定板51的底部左侧两端均固定安装第一支撑板61,第一转轴62通过轴承转动连接在两组第一支撑板61之间,第一旋转板63固定安装在第一转轴62上,第三伺服电机64固定安装在一组第一支撑板61上,且第三伺服电机64的输出轴与第一转轴62固定连接,刀片66固定安装在第一旋转板63的一侧上;
扫帚组件70包括:第三侧板71、第三螺杆72、第三滑块73、第三导向杆74、第五伺服电机75、第二支撑板76、第二转轴77、第二旋转板78、扫帚781、第六伺服电机79;
第一固定板51的底部中端两侧均固定安装第三侧板71,第三螺杆72通过轴承转动连接在两组第三侧板71之间,第三滑块73螺纹连接在第三螺杆72上,第三导向杆74固定安装在两组第三侧板71之间,且第三滑块73的内壁滑动连接第三导向杆74,第五伺服电机75固定安装在一组第三侧板71上,且第五伺服电机75的输出轴与第三螺杆72固定连接,第三滑块73的底部两端均固定安装第二支撑板76,第二转轴77通过轴承转动连接在两组第二支撑板76之间,第二旋转板78固定安装在第二转轴77上,第六伺服电机79固定安装在一组第二支撑板76上,且第六伺服电机79的输出轴与第二转轴77固定连接,扫帚781固定安装在第二旋转板78的一侧上;
簸箕组件80包括:第三支撑板81、第三转轴82、第三旋转板83、连接块84、簸箕85、第七伺服电机86;
第一固定板51的底部右侧两端均固定安装第三支撑板81,第三转轴82通过轴承转动连接在两组第三支撑板81之间,第三旋转板83固定安装在第三转轴82上,第七伺服电机86固定安装在一组第三支撑板81上,且第七伺服电机86的输出轴与第三转轴82固定连接,连接块84固定安装在第一旋转板63的一侧上,簸箕85固定安装在连接块84的一侧上;
工作原理:当不平整路面为可处理的凸起时,若是为依附在路面上的杂质时(如泥土等),使车体10进行移动,直至凸起位于刀片66一侧的正下方,此时,通过第三伺服电机64使第一转轴62带动第一旋转板63上的刀片66进行转动,以使刀片66处于倾斜状态(尖锐端朝下,且朝向凸起),过后,使刀片66往下移动,直至刀片66的尖锐端与路面接触,此时,使刀片66往凸起处进行移动,以实现对凸起进行铲除,进而使凸起不再依附在路面上;
当对凸起铲除后,亦或者所检测的凸起并未依附在路面上时,使车体10进行移动,直至凸起位于簸箕85和扫帚781之间的正下方,此时,通过第七伺服电机86使第三转轴82带动第三旋转板83上的簸箕85进行转动,直至簸箕85处于倾斜状(簸箕85的开口端朝下,且朝向凸起),此时,使簸箕85进行下降,直至箕85的开口端与路面相接触,然后,通过第六伺服电机79使第二转轴77带动第二旋转板78上的扫帚781进行转动,直至扫帚781与路面相接触,然后,通过第五伺服电机75使第三螺杆72进行旋转,以使扫帚781往簸箕85处进行移动,在扫帚781往簸箕85处进行移动时,则会将凸起扫到簸箕85中,过后,使簸箕85恢复至原位,并使簸箕85移至收集盒13处,进而将簸箕85中的凸起置于收集盒13中。
填充组件90包括:第二固定板91、空心管92、第二盒体93、第二电动推杆94、下压板95、泥浆泵96、用于储存泥浆的储存箱97;
左侧第一电动推杆44中的活塞杆固定安装第二固定板91,空心管92固定安装在第二固定板91的右侧内壁上,泥浆泵96固定安装在承载板11的顶部右侧上,且泥浆泵96的输出端与空心管92通过管道相连通,储存箱97固定安装在承载板11的顶部右侧上,且储存箱97与泥浆泵96的输入端通过管道相连通,第二盒体93固定安装在第二固定板91的左侧底部上,第二电动推杆94固定安装在第二盒体93的内壁上,第二电动推杆94中的活塞杆固定安装下压板95;
工作原理:当不平整路面为可处理的坑洼时,使车体10进行移动,直至填充组件90位于该坑洼的正上方,此时,使第二固定板91往下移动,以使空心管92位于坑洼的正上方,过后,通过泥浆泵96将储存箱97中的泥浆输送至坑洼处,直至所输送的泥浆量与所获取的容量相匹配,过后,使下压板95位于坑洼的正上方,然后,通过第二电动推杆94使下压板95往坑洼处进行移动,以实现将坑洼中的泥浆压平。
虽然在上文中已经参考实施方式对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。