一种电磁驱动光栅加速度计及闭环检测方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及惯性导航、光学加速度计领域,具体涉及一种电磁驱动光栅加速度计及闭环检测方法。
背景技术
加速度计是惯性导航系统中关键的组成部分之一,广泛应用于国民生产生活的各个领域。传统的加速度计都是电容效应、压阻效应或者隧道电子效应,这种传感方式有着一些固有缺点,比如易受环境温度影响和受电磁干扰的交叉灵敏度影响。相比传统的加速度计来说,所属MOMES类的微米光栅加速度计抗电磁干扰能力强,体积小精度高,有更好的灵敏度和线性度,有着更好的前景和应用价值。加速度计的线性度和检测精度是评估加速度计性能的重要指标,而在加速度计的设计过程中,同时提升线性度和动态检测范围也是当前本领域的研究难点和热点之一。
为了提高微米光栅加速度计的检测精度,现有技术中通过设定压电陶瓷的震动频率来对光栅和检测质量块之间的距离进行调制,再通过放大滤波和相敏检调处理,来抑制光功率波动、探测器噪声和系统电路噪声对该微弱信号的影响,从而提升敏感加速度信号的检测分辨率。实验表明该检测方式的等效分辨率提升到3ug,但它仍属于一种开环检测的方式,无法解决光学干涉非线性的影响,使得它的线性检测量程小于1mg难以实现工程化应用。
为了提升微米光栅加速度计的线性度和动态检测范围,现有技术中进行了多种探索,例如采用静电驱动的静电力反馈方法。理论上的动态检测范围不再有限制,但由于静电电压与极板间距实际的输入输出关系符合二阶非线性函数,当较大的加速度输入时,需要更大的反馈电压可能造成极板的吸附和击穿效应。且引入2阶非线性环节,线性度并没有实质上的提升,检测精度反而有所下降。
发明内容
本发明的目的是提供一种电磁驱动光栅加速度计及闭环检测方法,在满足线性度和检测精度的前提下,使加速度计的动态检测范围也能更好地满足工程化应用的需求。
为了实现上述任务,本发明采用以下技术方案:
一种电磁驱动光栅加速度计,包括敏感结构和信号处理单元;
敏感结构部分包括腔体、激光器、质量块,悬臂梁,金属衍射光栅,透明介质层,线圈、磁铁和反射镜;其中:
腔体设置于透明介质层上部,金属衍射光栅粘于透明介质上层,悬臂梁架设于所述腔体内,质量块通过悬臂梁设置在金属衍射光栅的上方,悬臂梁上下振动时,带动质量块同时振动;在质量块底部设置有所述反射镜,反射镜和金属衍射光栅之间构成F-P谐振腔结构;所述腔体顶部设置有盖体,盖体底部设置所述磁铁,所述线圈缠绕在质量块上;线圈、质量块、磁铁共同构成磁力矩器;激光器设置在透明介质层下部,用于向透明介质层上发射激光;
激光器产生的激光一部分透过透明介质被金属衍射光栅反射形成衍射光线;另一部分透过金属衍射光栅,经过质量块底部的反射镜反射,再次透过金属衍射光栅形成衍射光线;两衍射光束在透明介质中发生干涉,形成各固定级次条纹强度随金属衍射光栅、反射镜间距变化的衍射干涉信号;通过信号处理单元接收所述衍射干涉信号并进行信号的解算。
进一步地,所述信号处理单元包括模拟电路和数字检测电路两部分;模拟电路部分由光电探测器、前置放大滤波电路、线性放大电路,线性放大电路与所述线圈连接;数字检测电路部分包括FPGA模块,A/D转换器、相敏检测模块、数字低通滤波器、控制器、D/A转换器,其中,光电探测器、前置放大滤波电路、A/D转换器、相敏检测模块依次连接,相敏检测模块的输出分别连接控制器、数字低通滤波电路,数字低通滤波电路连接控制器,控制器的输出以及FPGA模块的输出经过D/A转换器、线性放大电路的处理后加载在磁力矩器上。
一种电磁驱动光栅加速度计的闭环检测方法,包括:
经过敏感结构输出的衍射干涉信号通过光电探测器实现光电转换,经过前置放大滤波电路进行放大滤波后进入到数字检测电路,经过A/D转换器进行模数转换之后,与FPGA模块产生的解调信号在相敏检测模块中实现相敏解调,再通过数字低通滤波器滤除噪声和背景杂散光干扰,得到提纯后的闭环误差信号;将提纯后的闭环误差信号送入控制器进行PID控制调节,得到反馈信号U
进一步地,所述FPGA模块产生两路信号,一路为调制信号U
进一步地,衍射干涉信号通过光电探测器PD实现光电转换,经过前置放大滤波电路进行放大滤波后产生的信号U
进一步地,解调后的信号表示为:
其中,U
进一步地,所述数字滤波器的表达式H(z)=h(0)+h(1)z
进一步地,所述提纯后的闭环误差信号表示为:
与现有技术相比,本发明具有以下技术特点:
相比于现有的驱动方式,本发明采用电磁驱动的方式代替静电驱动和PZT驱动;首先它属于非接触激励,不易受外界环境干扰,且电磁力和反馈电流满足一阶非线性关系,相对于静电驱动来说线性度好反馈效率高,同样的加速度输入需要更小的反馈电压从而可以扩展检测范围,且降低了功耗。对闭环误差信号进行根本上的分析,通过PDH调制技术对闭环误差信号进行提纯,抑制了光源波动噪声和系统低频噪声的干扰,从而提升了系统的线性度和静态检测精度。
本发明提出的微米光栅加速度计闭环检测方法解决了检测精度和测量范围不可兼得的问题,采用电磁驱动闭环的方式提升了线性度降低了功耗,推进了工程实践的进度。
附图说明
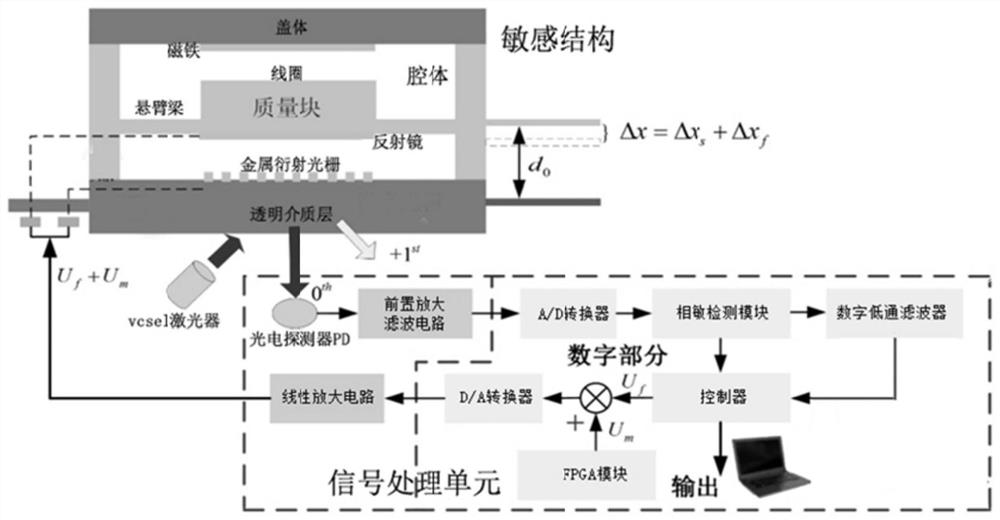
图1为本发明的电磁驱动光栅加速度计及闭环检测方法结构示意图;
图2为光电探测器输出和极板间距的关系示意图;
图3为调制闭环误差信号的理论频谱分布(左)调制闭环误差信号的实测频谱分布(右);
图4为解调闭环误差信号的理论频谱分布(左)解调闭环误差信号的实测频谱分布(右);
图5为闭环误差信号功率谱密度图。
具体实施方式
针对现有技术中存在的问题,本发明对静电驱动方式进行改进,采用磁电驱动闭环的方式。对于电磁驱动来说电磁力本身和反馈电流满足一阶线性关系,相对静电驱动的原理来说反馈效率高,同样的加速度输入需要更小的反馈补偿电压从而降低了功耗提供了更大的检测范围来满足实际工程实践的需要。并对该闭环误差信号进行本质上的分析,提出新的闭环信号检测方案,来从根本上提高微米光栅加速度计的线性度和检测精度。
本发明提出一种基于电磁反馈的微米光栅加速度计数字闭环检测方法,下面通过微米光栅加速度计闭环检测方案设计、闭环误差信号的噪声抑制和闭环误差信号信噪比测试验证三个部分对本发明技术方案进行详细说明。
1.电磁驱动光栅加速度计及闭环检测方法方案设计
基于磁电闭环的微米光栅加速度计如图3所示,包括敏感结构和信号处理单元两个部分,结构如图3所示。
敏感结构部分包括腔体、vcsel激光器、质量块,悬臂梁,金属衍射光栅,透明介质层,线圈、磁铁和反射镜;其中腔体设置于透明介质层上部,金属衍射光栅粘于透明介质上层,悬臂梁架设于所述腔体内,质量块通过悬臂梁设置在金属衍射光栅的上方,悬臂梁上下振动时,带动质量块同时振动;在质量块底部设置有所述反射镜,反射镜和金属衍射光栅之间构成F-P谐振腔(法布里-珀罗谐振腔)结构;所述腔体顶部设置有盖体,盖体底部设置所述磁铁,所述线圈缠绕在质量块上;线圈、质量块、磁铁共同构成磁力矩器;vcsel激光器设置在透明介质层下部,用于向透明介质层上发射激光。
vcsel激光器产生的激光一部分透过透明介质被金属衍射光栅反射形成衍射光线;另一部分透过金属衍射光栅,经过质量块底部的反射镜反射,再次透过金属衍射光栅形成衍射光线;两衍射光束在透明介质中发生类似迈克尔逊干涉,形成各固定级次条纹强度随金属衍射光栅、反射镜间距变化的衍射干涉信号;通过信号处理单元接收所述衍射干涉信号并进行信号的解算。
信号处理单元是光栅加速度计信息读出系统的硬件平台,包括模拟电路和数字检测电路两部分;模拟电路部分由光电探测器PD、前置放大滤波电路、线性放大电路,线性放大电路与所述线圈连接;数字检测电路部分包括FPGA模块,A/D转换器、相敏检测模块、数字低通滤波器、控制器、D/A转换器。光电探测器PD接收衍射干涉信号并经过前置放大滤波电路处理后进入数字检测电路进行后续的信号处理。
在本方案中,前置放大滤波电路除了实现微弱信号的放大滤波,另外还可以完成光电探测器输出与A/D转换器输入的电平匹配;线性放大电路是沟通数字检测电路部分和磁力矩器的桥梁实现阻抗电平匹配。
整个光栅加速度计闭环检测方法的工作原理为:
经过敏感结构输出的衍射干涉信号(即加速度信号)通过光电探测器PD实现光电转换,经过前置放大滤波电路进行放大滤波后进入到数字检测电路,经过A/D转换器进行模数转换之后,与FPGA模块产生的解调信号在相敏检测模块中实现相敏解调(PSD),再通过数字低通滤波器滤除1/f噪声和背景杂散光干扰,得到提纯后的闭环误差信号;将提纯后的闭环误差信号送入控制器进行PID控制调节,得到与外界输入的加速度信号成线性关系的反馈信号U
所述FPGA模块产生两路信号,一路为调制信号U
2.闭环误差信号的噪声抑制
理论上,任何具有干涉分辨率的衍射级次光都可以用来检测加速度改变引起的位移变化,且每级次条纹呈一定的间距分布。通过理论仿真分析,0级次光携带的能量最大具有更好的光学灵敏度。故本方案中以0级次光为研究对象,光电探测器探测到的衍射干涉信号的电压输出可表示为:
上式中,I
但微米光栅加速度计作为一种光学读出式加速度计,受光源波动影响极大,主要表现为作为加法项的光功率漂移、杂散光噪声和乘法项的光源强度噪声,如式1所示,导致光电探测器输出的加速度信息是一个可能被过度噪声所淹没的微弱信号,所以很难去准确提取代表外界输入加速度信息的误差信号Δx。目前的闭环检测方案默认光源的长期入射光强平均值是一个固定值,将微米光栅加速度计系统近似为线性系统,把I
针对这些问题,本发明设计了一个新颖的基于PDH调制技术的数字闭环检测方案,首先通过PDH(Pound-Drever-Hall)调制解调方法来将微米光栅加速度计的输出调制到高频,来抑制系统的1/f和杂散光干扰,从而精确的提取到闭环误差信号。本方案所提出的光栅加速度计的敏感结构,实质是一种FM-to-AM,通过调制改变的是金属衍射光栅和反射镜之间的间距d,实际上改变的是干涉光强信号的相差,等效为干涉场的相位调制。PDH调制解调技术主要是基于锁定放大的原理,针对频率较低的慢变信号它主要由调制信号、解调信号、相敏检测器(PSD)和低通滤波器组成(LPF),这些模块都是通过FPGA芯片产生和实现的。
调制信号和解调信号具有相同的频率ω
上式中,U
根据贝塞尔公式,调制后的信号的表达式可以化简为:
其中β=4π/λ,A表示调制信号的幅度,J
由上式可以得到调制后的信号U
则衍射干涉信号通过光电探测器PD实现光电转换,经过前置放大滤波电路进行放大滤波后产生的信号U
上式中,k
理论上来说,数字低通滤波器带宽做的越窄,噪声信号被滤除的越干净,只希望保留准确闭环误差信号Δx(t);但是数字低通滤波器带宽做的越低,对应的延时就会越高,解调环节带来的时滞会导致闭环系统的不稳定性或降低系统的性能。所以综合考虑带宽和延时的关系,设计了一个32阶次,1kHz带宽的FIR数字滤波器,滤波器的表达式H(z)=h(0)+h(1)z
通过滤波器将J的高阶次分量滤掉,整个PDH调制解调过程的频谱能量分布如图3和图4所示。调制后乘法项部分对应的光强能量被分解到nω
3.闭环误差信号信噪比对比测试
为了验证本方案中的调制方法对闭环误差信号的噪声抑制效果,设计了一组对比实验。第一组为采用本方案的调制解调方法,由FPGA模块以100MHz时钟产生数字幅度为512,频率为5Hz的正弦信号通过16位的D/A转换器,与反馈调制信号一起作用于磁力矩器模拟外界加速度输入。采集解调数字滤波后的信号和准PDH调制后的闭环误差信号。另一组实验不对闭环误差信号进行任何处理直接送入PID控制器处理。两组试验采集到的数据作傅里叶变换得到的功率谱密度如附图5所示。
可以看到两种闭环检测方案下,在5Hz的加速度输入频率能量上是一致的,闭环误差信号的频率与输入信号频率相同。采用本方案调制技术的磁电驱动微米光栅加速度计系统的闭环误差信号信噪比为-42dB,相对于不做噪声抑制处理的闭环误差信号信噪比提升约19dB,这是由于加速度计系统低频1/f噪声和滤波带宽内的光源能量波动得以抑制,证明了所设计的基于PDH调制的闭环检测方法可以对磁电驱动微米光栅加速度计的闭环误差信号进行提纯,从而提高加速度计的静态检测精度。
本方案基于电磁反馈的微米光栅加速度计的闭环驱动方式,磁力矩器模块由缠绕在质量块上的线圈和盖体下方的磁铁组成,作为微米光栅加速度计磁电驱动的执行机构。加载在线圈上的电压包括调制电压和反馈电压两个部分,分别实现调制驱动和负反馈。相比静电驱动,由电磁驱动所产生的电磁力本身和反馈电流满足一阶线性关系反馈效率高,可以实现两个方向加速度输入的闭环检测,扩大了检测范围,同样的输入需要更小的反馈补偿电压从而降低了功耗。
基于PDH(Pound-Drever-Hall)调制技术的闭环误差信号处理方法,首先针对闭环误差信号的干扰源进行本质上的分析,通过PDH调制解调方法来将微米光栅加速度计的输出调制到高频,来抑制系统的1/f和杂散光干扰,从而精确的提取到闭环误差信号,最终在保证不牺牲动态测试范围的前提下提升了线性度和检测精度。
以上实施例仅用于说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行同等替换;而这些修改或替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围,均应包含在本申请的保护范围之内。
- 一种电磁驱动光栅加速度计及闭环检测方法
- 一种基于磁旋光微光学加速度计的加速度信息闭环检测系统