一种外墙全自动喷涂智能设备
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及建筑工业设备领域,具体是一种外墙全自动喷涂智能设备。
背景技术
涂料,传统名称为油漆。所谓涂料是涂覆在被保护或被装饰的物体表面,并能与被涂物形成牢固附着的连续薄膜,通常是以树脂、或油、或乳液为主,添加或不添加颜料、填料,添加相应助剂,用有机溶剂或水配制而成的粘稠液体。
现在外墙喷涂工具是纯手工借助喷涂机施工的,施工速度慢,效率低,喷涂不均匀,人工费用成本高。
发明内容
本发明的目的在于提供一种外墙全自动喷涂智能设备,以解决上述背景技术中提出的问题。为实现上述目的,本发明提供如下技术方案:
一种外墙全自动喷涂智能设备,包括:喷枪头,其通过机器人进行安装,所述喷枪头通过机器人调整位置完成喷涂;喷枪头连通在上料罐上,并由上料罐进行供料;控制系统,所述控制系统上设有视觉控制系统和喷涂控制系统,且连接控制机器人并配合视觉控制系统进行运作,调整喷枪头的位置,再利用喷涂控制系统控制喷枪头和上料罐协同完成控制喷涂时间和出料大小的喷涂;以及,所述机器人上设置有挡板,再利用视觉控制系统自动检测外墙涂料颜色不一,通过挡板做遮挡保护,利用视觉控制系统自动记忆上次喷涂的位置,暂停后可继续原位置喷涂。
进而,控制系统通过设有的视觉控制系统智能检测出外墙线条等异形部位,自动测出异形部位与墙体之间的距离,通过机器人自动调节喷枪头与墙面的喷涂距离;视觉控制系统可智能识别障碍物,并发出警报;实时监控喷涂情况,自动记录喷涂情况,可数据采集,自动分析并上传到数据库;实现了节省人工,降低成本;不需要人工喷涂,只要单人操作机器,即可自动喷涂;节省材料,精准喷涂;施工速度快;省去外墙施工的高危风险。
解决了现在外墙喷涂工具是纯手工借助喷涂机施工的,施工速度慢,效率低,喷涂不均匀,人工费用成本高的问题。
在本发明外墙全自动喷涂智能设备中:所述机器人为六轴机器人,设置有六个轴机械臂。
本发明外墙全自动喷涂智能设备进一步的方案:所述机器人上加装有伺服电机。
在本发明外墙全自动喷涂智能设备中:所述视觉控制系统设置有视觉识别相机摄像头,而视觉识别相机摄像头安装在机器人上靠近喷枪头的位置处,并利用视觉识别相机摄像头自动检测。
本发明外墙全自动喷涂智能设备进一步的方案:位于所述喷枪头与机器人之间安装有监测感应器。
在本发明外墙全自动喷涂智能设备中:所述喷枪头通过出料管连通在上料罐上,并由上料罐进行供料。
本发明外墙全自动喷涂智能设备进一步的方案:所述上料罐上安装有空压机。
在本发明外墙全自动喷涂智能设备中:所述控制系统包含有电源控制系统、自动升降控制系统、喷涂控制系统、自动记忆系统、智能检测系统、智能感应系统、自动报警系统、定位系统、自动计算系统和储存系统。
在本发明外墙全自动喷涂智能设备中:所述机器人安装在吊篮上,而吊篮通过固定连接有的固定绳实现电机带动完成升降调整;所述上料罐安装在吊篮上;以及控制系统上配合吊篮设置有吊篮自动升降系统。
与现有技术相比,本发明外墙全自动喷涂智能设备,包括:喷枪头,其通过机器人进行安装,所述喷枪头通过机器人调整位置完成喷涂;喷枪头连通在上料罐上,并由上料罐进行供料;控制系统,所述控制系统上设有视觉控制系统和喷涂控制系统,且连接控制机器人并配合视觉控制系统进行运作,调整喷枪头的位置,再利用喷涂控制系统控制喷枪头和上料罐协同完成控制喷涂时间和出料大小的喷涂;以及,所述机器人上设置有挡板,再利用视觉控制系统自动检测外墙涂料颜色不一,通过挡板做遮挡保护,利用视觉控制系统自动记忆上次喷涂的位置,暂停后可继续原位置喷涂;控制系统通过设有的视觉控制系统智能检测出外墙线条等异形部位,自动测出异形部位与墙体之间的距离,通过机器人自动调节喷枪头与墙面的喷涂距离;视觉控制系统可智能识别障碍物,并发出警报;实时监控喷涂情况,自动记录喷涂情况,可数据采集,自动分析并上传到数据库;实现了节省人工,降低成本;不需要人工喷涂,只要单人操作机器,即可自动喷涂;节省材料,精准喷涂;施工速度快;省去外墙施工的高危风险。
附图说明
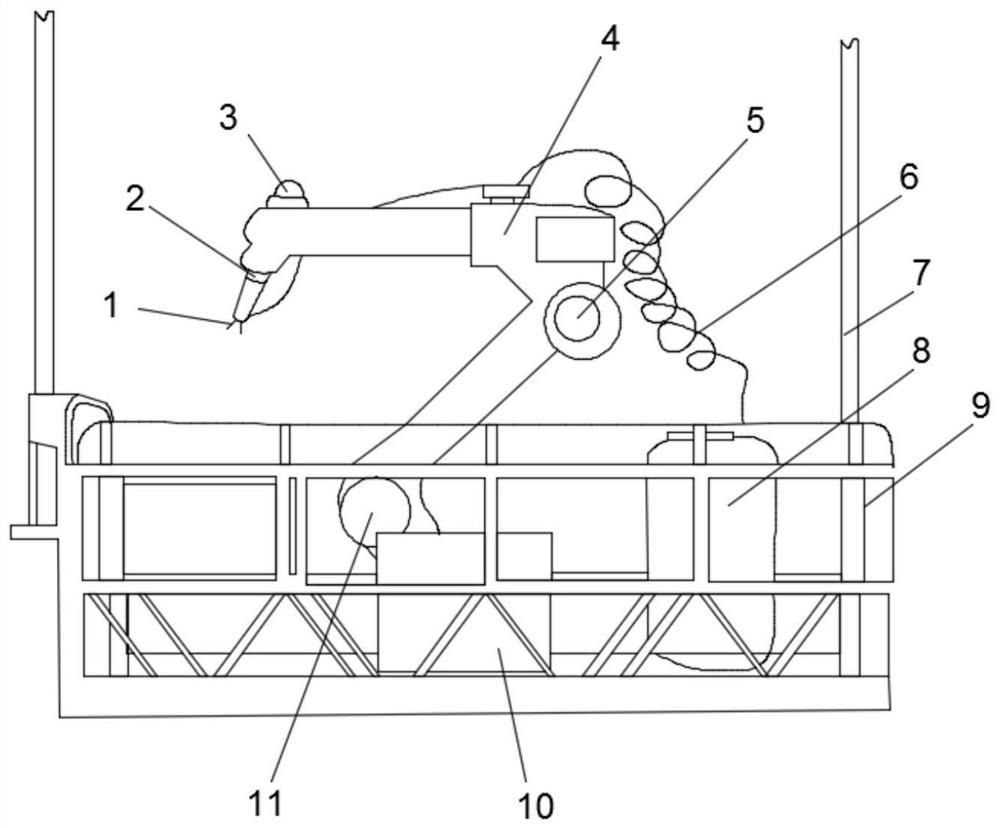
图1为本发明外墙全自动喷涂智能设备的结构示意图。
图中:1-喷枪头;2-监测感应器;3-视觉识别相机摄像头;4-机器人;5-伺服电机;6-出料管;7-固定绳;8-上料罐;9-吊篮;10-控制系统;11-挡板。
具体实施方式
下面结合具体实施方式对本发明的技术方案作进一步详细地说明。
针对现在外墙喷涂工具是纯手工借助喷涂机施工的,施工速度慢,效率低,喷涂不均匀,人工费用成本高的问题,本发明的目的在于提供一种外墙全自动喷涂智能设备,以解决上述问题。为实现上述目的,本发明提供如下技术方案:
本发明实施例中,如图1所示,一种外墙全自动喷涂智能设备,包括:喷枪头1,其通过机器人4进行安装,所述喷枪头1通过机器人4调整位置完成喷涂;喷枪头1连通在上料罐8上,并由上料罐8进行供料;
控制系统10,所述控制系统10上设有视觉控制系统和喷涂控制系统,且连接控制机器人4并配合视觉控制系统进行运作,调整喷枪头1的位置,再利用喷涂控制系统控制喷枪头1和上料罐8协同完成控制喷涂时间和出料大小的喷涂;
以及,所述机器人4上设置有挡板11,再利用视觉控制系统自动检测外墙涂料颜色不一,通过挡板11做遮挡保护,利用视觉控制系统自动记忆上次喷涂的位置,暂停后可继续原位置喷涂。
本发明实施例中,控制系统10通过设有的视觉控制系统智能检测出外墙线条等异形部位,自动测出异形部位与墙体之间的距离,通过机器人4自动调节喷枪头1与墙面的喷涂距离;视觉控制系统可智能识别障碍物,并发出警报;实时监控喷涂情况,自动记录喷涂情况,可数据采集,自动分析并上传到数据库;实现了节省人工,降低成本;不需要人工喷涂,只要单人操作机器,即可自动喷涂;节省材料,精准喷涂;施工速度快;省去外墙施工的高危风险。
本发明实施例中,如图1所示,所述机器人4为六轴机器人,设置有六个轴机械臂,且手臂长1.4米,左右单边展开能伸最长距离为1.4米,可以根据外立面不同角度进行360旋转喷涂,每个手臂的关节均可根据喷涂部位不一自由旋转,升降高度不限。进一步的,所述机器人4上加装有伺服电机5。
本发明实施例中,如图1所示,所述视觉控制系统设置有视觉识别相机摄像头3,而视觉识别相机摄像头3安装在机器人4上靠近喷枪头1的位置处,并利用视觉识别相机摄像头3自动检测。进一步的,位于所述喷枪头1与机器人4之间安装有监测感应器2。
所述喷枪头1通过出料管6连通在上料罐8上,并由上料罐8进行供料。进一步的,所述上料罐8上安装有空压机。
本发明实施例中,如图1所示,所述控制系统10包含有电源控制系统、电源控制系统、智能检测系统、智能感应系统、自动报警系统、定位系统、自动计算系统和储存系统。
所述机器人4安装在吊篮9上,而吊篮9通过固定连接有的固定绳7实现电机带动完成升降调整;所述上料罐8安装在吊篮9上;以及控制系统10上配合吊篮9设置有吊篮自动升降系统。
本发明外墙全自动喷涂智能设备,包括:喷枪头1,其通过机器人4进行安装,所述喷枪头1通过机器人4调整位置完成喷涂;喷枪头1连通在上料罐8上,并由上料罐8进行供料;控制系统10,所述控制系统10上设有视觉控制系统和喷涂控制系统,且连接控制机器人4并配合视觉控制系统进行运作,调整喷枪头1的位置,再利用喷涂控制系统控制喷枪头1和上料罐8协同完成控制喷涂时间和出料大小的喷涂;以及,所述机器人4上设置有挡板11,再利用视觉控制系统自动检测外墙涂料颜色不一,通过挡板11做遮挡保护,利用视觉控制系统自动记忆上次喷涂的位置,暂停后可继续原位置喷涂;控制系统10通过设有的视觉控制系统智能检测出外墙线条等异形部位,自动测出异形部位与墙体之间的距离,通过机器人4自动调节喷枪头1与墙面的喷涂距离;视觉控制系统可智能识别障碍物,并发出警报;实时监控喷涂情况,自动记录喷涂情况,可数据采集,自动分析并上传到数据库;实现了节省人工,降低成本;不需要人工喷涂,只要单人操作机器,即可自动喷涂;节省材料,精准喷涂;施工速度快;省去外墙施工的高危风险。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
上面对本发明的较佳实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 一种外墙全自动喷涂智能设备
- 一种全自动外墙喷涂装置