用于自动烹饪机的锅具称重装置、料理机及机器人
文献发布时间:2023-06-19 09:36:59
技术领域
本发明涉及智能机器人领域,具体而言,涉及一种用于自动烹饪机的锅具称重装置、料理机及机器人。
背景技术
随着社会的快速发展,现在的人们生活节奏快,工作压力大,这种生活环境使得人们没有更多的时间去准备烹饪,传统的人工烹饪方式已经无法很好地适应人们快节奏的生活方式,由智能厨房代替传统的人们亲自下厨制作美味饭菜的呼声越来越高。而近些年随着人工智能科技发展迅速,智能机器人应用领域越来越广,将智能机器人应用在烹饪领域也是必然的发展趋势。
由于非人工烹饪,对于烹饪中的菜品、调料以及汤汁的量的把控就无法依靠烹饪经验决定,机器更需要数据的支撑。那么在现有技术中普遍使用的烹饪机器人主要是通过设置在锅底的重量秤来采集国内菜品的质量数据,但仍存在一些问题:一是由于锅具呈半球形,其位置很难固定,导致称重不准确;二是锅具频繁晃动影响重量秤的精度,易导致重量秤称重不准确或损坏,稳定性差。
发明内容
本发明的目的在于提供一种用于自动烹饪机的锅具称重装置,其能够在一定程度上改善自动烹饪机锅具称重精度和稳定性。
本发明是这样实现的:
一种用于自动烹饪机的锅具称重装置,包括称重机构、控制器、限位机构、信号输出机构、报警机构、传力挂耳、缓冲构件以及抱箍,所述抱箍套设于所述锅具的外部,所述缓冲构件设置在所述抱箍与所述锅具之间;所述传力挂耳数量至少四组且间隔分布在所述抱箍上,多组所述传力挂耳均与所述抱箍连接;所述称重机构连接所述传力挂耳,用于测量所述传力挂耳的受力;所述称重机构连接所述控制器,并可将称重信号传输至所述控制器;所述控制器分别与所述信号输出机构及所述报警机构电连接;所述限位机构包括限位槽以及限位杆,所述限位槽设置于所述锅具的底部,所述限位杆的一端与自动烹饪机的外壳连接,所述限位杆的另一端设有限位开关,所述限位开关与所述控制器电连接。
在一种可行实施方案中,所述抱箍上设置有多组贴片,所述抱箍通过所述贴片与所述锅具外部连接,所述缓冲构件设置在所述贴片与所述锅具之间。
在一种可行实施方案中,所述传力挂耳的数量为四组,四组所述传力挂耳等间隔设置在所述抱箍上,且均与所述称重机构连接。
在一种可行实施方案中,所述限位杆具有第一伸缩杆、第二伸缩杆以及锁定件,所述第一伸缩杆插设于所述第二伸缩杆内,所述锁定件分别与所述第一伸缩杆及所述第二伸缩杆连接,用于锁定所述第一伸缩杆与所述第二伸缩杆之间的相对位置。
在一种可行实施方案中,所述称重机构包括承重盘、压力传感器以及与自动烹饪机的外壳连接的承重支架,所述传力挂耳设置在所述承重盘上,所述承重盘设置在所述压力传感器上端,所述压力传感器设置在所述承重支架上,且与所述控制器电连接。
在一种可行实施方案中,所述承重盘设有凹槽,所述传力挂耳设置于所述凹槽内。
在一种可行实施方案中,所述信号输出机构包括电子显示仪表,所述电子显示仪表与所述控制器电连接,用于显示称重数据。
本发明提供的用于自动烹饪机的锅具称重装置,其使用方法,主要包括以下步骤:
S1、设定报警阈值:
操作人员通过控制器设定最低重量阈值L及最高重量阈值H,将其写入数据库;
S2、调零:
所述称重机构采集所述锅具、所述抱箍、所述缓冲构件及所述传力挂耳的初始重量之和皮重X;所述称重机构将初始重量之和X写入数据库,最低重量阈值L应大于初始重量之和X;
S3、称重:
所述锅具中加入称重目标物品;所述称重机构采集所述锅具、所述目标物品、所述抱箍、所述缓冲构件及所述传力挂耳的总重量之和Y;
所述称重机构将总重量之和Y加入数据库,最高重量阈值H须小于总重量之和Y;
目标物品重量M=总重量之和Y-初始重量之和X;
本发明的有益效果至少包括:
本发明申请提供的用于自动烹饪机的锅具称重装置,在使用过程中,需要将与抱箍连接的传力挂耳放置于称重机构上,由于抱箍与缓冲构件套设于锅具外部,对锅具起到支撑作用,故而抱箍承受锅具的所有重力,并可将承受锅具的重力传力至与之连接的传力挂耳上,使得称重机构所称得重量为锅具、抱箍、缓冲构件以及传力挂耳的初始重量之和X,并可将初始重量之和X加入数据库中,也可利用信号输出机构输出初始重量之和X所对应的重量信号。再将锅具中放入目标物品,目标物品的重量通过锅具传输至抱箍,进而传输至传力挂耳,使得称重机构所称得重量为锅具、锅具内目标物品、抱箍、缓冲构件以及传力挂耳总重量之和Y,并可将总重量之和Y加入数据库中,操作人员也可利用信号输出机构输出总重量之和Y所对应的重量信号。操作人员可利用控制器比对总重量之和Y与初始重量之和X的数据差值,即为目标物品重量M的数值,故而本发明能够实现测量锅具自重以及锅具内目标物品的重量,由于本发明提供的用于自动烹饪机的锅具称重装置中抱箍环抱锅具外部,可以避免锅具出现晃动、旋转等情况,并且由于间隔设置多组传力挂耳,能够有效避免由于锅具放置不平造成的重量测量不准确的情况,此外,设置在抱箍与锅具之间的缓冲构件也能够缓冲锅具的晃动,从而使得使得测量数据更加准确,也不会称重机构造成损坏。此外,如当锅具出现晃动或旋转等情况时,抱箍上的多个与锅具外部贴合的部分能够相互抵消受到锅具对应部位施加的力,从而保证在测量锅具重量时的稳定性和测量精度,且不会损坏称重机构。
在操作本发明提供的用于自动烹饪机的锅具称重装置的过程中,需要注意,限位机构的限位杆的一端设有限位开关且插入限位槽的槽孔内。在使用时,限位杆与锅具底部无接触。如此设置,当锅具产生晃动时,限位槽随锅具产生晃动,但晃动受制于插设在限位槽的槽孔中的限位杆,如晃动幅度过大,限位槽受到限位杆的阻碍,进而大大降低与限位槽连接的锅具的晃动幅度,避免损坏称重机构,同时也能够增加称重机构测量锅具重量时的精度与稳定性。
综上,本发明提供的用于自动烹饪机的锅具称重装置,可在一定程度上改善自动烹饪机锅具的称重精度和稳定性。
本发明的另一目的在于提出一种料理机,其能够在一定程度上改善料理机称重精度和稳定性。
为达到上述目的,本发明的技术方案是这样实现的:
本发明提供的料理机,包括:控制系统、加料装置、排烟装置、加热装置、烹饪锅具以及如上述技术方案所述的用于自动烹饪机的锅具称重装置,所述控制系统分别与所述加料装置、所述排烟装置、所述加热装置及所述的用于自动烹饪机的锅具称重装置信号连接;所述加料装置、所述排烟装置、所述加热装置均与所述烹饪锅具连接;所述用于自动烹饪机的锅具称重装置与所述烹饪锅具连接,测量所述烹饪锅具的重量。
其中,用于自动烹饪机的锅具称重装置包括称重机构、控制器、限位机构、信号输出机构、报警机构、传力挂耳、缓冲构件以及抱箍:所述抱箍套设于所述烹饪锅具的外部,所述缓冲构件设置在所述抱箍与所述烹饪锅具之间;所述传力挂耳数量至少四组且间隔分布在所述抱箍上,多组所述传力挂耳均与所述抱箍连接;所述称重机构连接所述传力挂耳,用于测量所述传力挂耳的受力;所述称重机构连接所述控制器,并可将称重信号传输至所述控制器;所述控制器分别与所述信号输出机构及所述报警机构电连接;所述限位机构包括限位槽以及限位杆,所述限位槽设置于所述烹饪锅具的底部,所述限位杆的一端与自动烹饪机的外壳连接,所述限位杆的另一端设有限位开关,所述限位开关与所述控制器电连接。
所述控制系统分别与所述加料装置、所述排烟装置、所述加热装置及所述的用于自动烹饪机的锅具称重装置信号连接;所述加料装置、所述排烟装置、所述加热装置均与所述烹饪锅具连接;所述用于自动烹饪机的锅具称重装置与所述烹饪锅具连接,测量所述烹饪锅具的重量。
进一步地,所述加料装置设有加料流量计及控制阀门,所述用于自动烹饪机的锅具称重装置的信号输出机构连接所述控制系统,向所述控制系统输出称重信号;所述加料装置的加料流量计连接所述控制系统,向所述控制系统输出流量信号;所述控制系统连接所述控制阀门,以调节所述控制阀门的开关状态。
所述料理机与上述用于自动烹饪机的锅具称重装置相对于现有技术所具有的优势相同,在此不再赘述。
本发明的还一目的在于提出一种机器人,其能够在一定程度上改善料理机称重精度和稳定性。
为达到上述目的,本发明的技术方案是这样实现的:
本发明提供的机器人,包括:控制系统、加料装置、排烟装置、加热装置、烹饪锅具以及如上述技术方案所述的料理机。
其中,料理机包括有控制系统、加料装置、排烟装置、加热装置、烹饪锅具以及用于自动烹饪机的锅具称重装置。
所述机器人与上述用于自动烹饪机的锅具称重装置相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1为本发明实施例一提供的用于自动烹饪机的锅具称重装置的结构示意图;
图2为本发明实施例二提供的料理机的结构示意图;
图3为本发明实施例二提供的料理机的立体结构示意图;
图4为本发明实施例三提供的机器人的立体结构示意图;
图5为本发明实施例三提供的机器人的结构示意图。
图中:
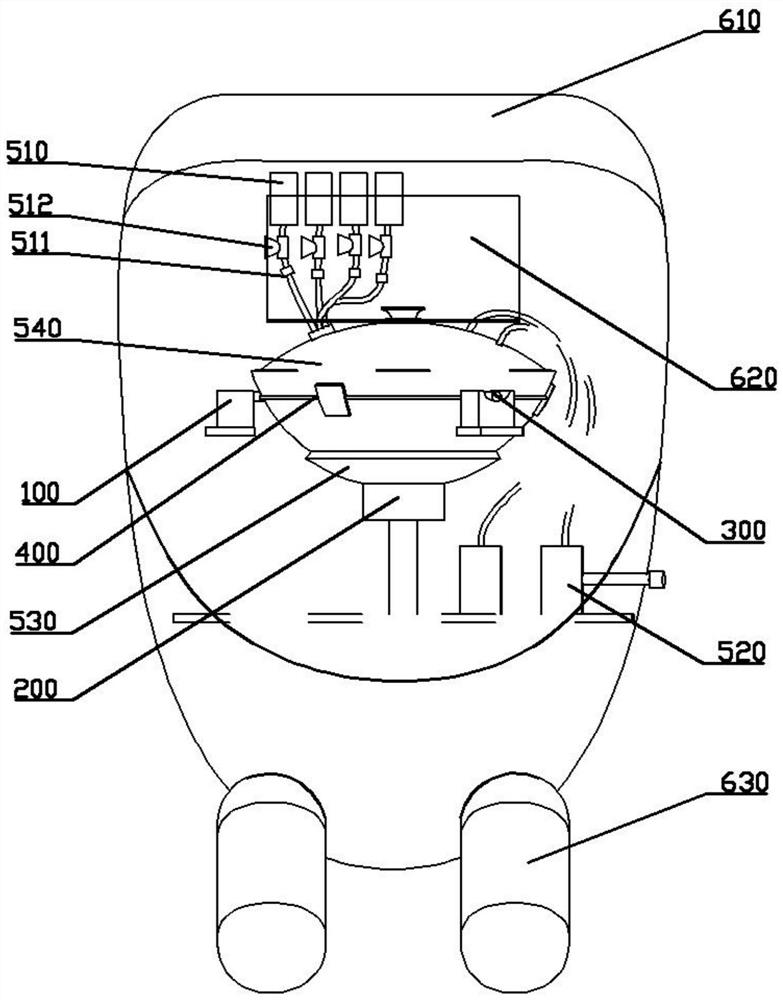
100-称重机构;200-限位机构;300-传力挂耳;400-抱箍;110-承重盘;120-压力传感器;130-承重支架;210-限位槽;220-限位杆;510-加料装置;520-排烟装置;530-加热装置;540-烹饪锅具540;610-外壳;620-控制面板;630-路径行走模块;511-加料流量计;512-控制阀门。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以通过各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
下面结合附图,对本发明的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
第一实施例
请参照图1及图2,本实施例提供一种用于自动烹饪机的锅具称重装置,包括称重机构100、控制器、限位机构200、信号输出机构、报警机构、传力挂耳300、缓冲构件以及抱箍400。
其中,抱箍400套设于锅具的外部。
抱箍400为环形结构,抱箍400的环形内圆直径小于锅具开口的最大直径,优选为锅具开口的最大直径的2/3,抱箍400套设于锅具外部,环抱锅具并与锅具贴合,用于承受并传递锅具及锅具内物品的重量。
优选地,在本发明实施例一中抱箍400为金属材质,以免由于锅具温度过高导致抱箍400损坏。
抱箍400也可为其他防火材料或不燃材料制成,如陶瓷材料。
缓冲构件设置在抱箍400与锅具之间,缓冲构件可为橡胶材料或其他耐高温软质材料,主要用于过滤烹饪过程中锅具产生的振动。
传力挂耳300数量至少四组且间隔分布在抱箍400上,多组传力挂耳300均与抱箍400连接;称重机构100连接传力挂耳300,用于测量传力挂耳300的受力。
称重机构100连接控制器,并可将称重信号传输至控制器,控制器分别与信号输出机构及报警机构电连接。
在本发明实施例一中,传力挂耳300连接抱箍400,并设置在称重机构100上,称重机构100固定或连接自动烹饪机的外壳610,称重机构100可水平设置在自动烹饪机内,传力挂耳300的一端连接抱箍400,另一端设置在称重机构100上,并将所承受的锅具重量、锅具内目标物品重量、抱箍400重量、缓冲机构重量以及传力挂耳300自重传力至称重机构100。
称重机构100与控制器电连接,连接方式可为通过数据线或导线等连接,也可为通过蓝牙等无线连接方式进行连接。
在本发明提供的实施例一中,称重机构100通过电连接可将称重信号传输至控制器,控制器与信号输出机构电连接,并可将称重信号处理后经信号输出机构输出信号。
控制器与报警机构电连接,如称重机构100所称初始重量之和X小于最低重量阈值L,称重机构100将数据发送控制器,控制器控制报警机构发出报警信号;如称重机构100所称总重量之和Y大于最高重量阈值H,称重机构100将数据发送控制器,控制器控制报警机构发出报警信号。
在本发明实施例一提供的用于自动烹饪机的锅具称重装置中,限位机构200包括限位槽210以及限位杆220。
限位槽210设置于锅具的底部,优选为底部正中,连接方式可为焊接等固定连接形式,以便增加连接稳固性。
限位杆220的一端与自动烹饪机的外壳610连接,限位杆220的另一端设有限位开关且插入限位槽210内,限位开关与控制器电连接。
限位槽210可设有槽口,限位杆220插入限位槽210的槽口。需要说明的是,限位杆220的尺寸应小于限位槽210的槽口尺寸。
本发明实施例一提供的用于自动烹饪机的锅具称重装置,其使用方法,主要包括以下步骤:
S1、设定报警阈值:
操作人员通过控制器设定最低重量阈值L及最高重量阈值H,将其写入数据库;
S2、调零:
当限位杆220插入限位槽210的一端不接触锅具底部时,限位开关关闭。称重机构100采集锅具、抱箍400、缓冲构件及传力挂耳300的初始重量之和皮重X,称重机构100将初始重量之和X写入数据库;
值得注意的是,最低重量阈值L须大于初始重量之和X,否则触发报警机构报警。
S3、称重:
在锅具中加入称重目标物品;称重机构100采集锅具、目标物品、抱箍400、缓冲机构及传力挂耳300的总重量之和Y;称重机构100将总重量之和Y写入数据库,最高重量阈值H须小于总重量之和Y,否则触发报警机构报警。
控制器调用数据X与数据Y并进行计算,目标物品重量M为总重量之和Y与初始重量之和X的差值,控制器将目标物品重量M所对应的电信号传输至信号输出机构,输出称重信号。
在使用本发明实施例一提供的用于自动烹饪机的锅具称重装置时,当限位杆220插入限位槽210的一端接触锅具底部时,锅具底部接触限位开关,限位开关开启,并将触发信号发送至控制器,控制器将信号进行处理后发送至报警机构,触发报警机构报警。
同时,当控制器同时接收到称重信号和限位开关的开启信号时,优先处理并传输限位开关的开启信号。
在使用本发明实施例一提供的用于自动烹饪机的锅具称重装置的过程中,操作人员需要将与抱箍400连接的传力挂耳300放置于称重机构100上,由于抱箍400与缓冲构件套设于锅具外部,对锅具起到支撑作用,故而抱箍400承受锅具的所有重力,并可将承受锅具的重力传力至与之连接的传力挂耳300上,使得称重机构100所称得重量为锅具、抱箍400、缓冲构件以及传力挂耳300的初始重量之和X,并可将初始重量之和X加入数据库中,也可利用信号输出机构输出初始重量之和X所对应的重量信号。
再将锅具中放入目标物品,目标物品的重量通过锅具传输至抱箍400,进而传输至传力挂耳300,使得称重机构100所称得重量为锅具、锅具内目标物品、抱箍400、缓冲构件以及传力挂耳300总重量之和Y,并可将总重量之和Y加入数据库中,操作人员也可利用信号输出机构输出总重量之和Y所对应的重量信号。
操作人员可利用控制器比对总重量之和Y与初始重量之和X的数据差值,即为目标物品重量M的数值,故而本发明实施例一能够实现测量锅具自重以及锅具内目标物品的重量,由于本发明实施例一提供的用于自动烹饪机的锅具称重装置中抱箍400环抱锅具外部,可以避免锅具出现晃动、旋转等情况,并且由于间隔设置多组传力挂耳300,能够有效避免由于锅具由于放置不平造成的重量测量不准确的情况。
此外,设置在抱箍400与锅具之间的缓冲构件也能够缓冲锅具的晃动,从而使得使得测量数据更加准确,也不会称重机构100造成损坏。
此外,如当锅具出现晃动或旋转等情况时,抱箍400上的多个与锅具外部贴合的部分能够相互抵消受到锅具对应部位施加的力,从而保证在测量锅具重量时的稳定性和测量精度,且不会损坏称重机构100。
在操作本发明提供的用于自动烹饪机的锅具称重装置的过程中,需要注意,限位机构200的限位杆220的一端设有限位开关且插入限位槽210的槽孔内。在使用时,限位杆220与锅具底部无接触。如此设置,当锅具产生晃动时,限位槽210随锅具产生晃动,但晃动受制于插设在限位槽210的槽孔中的限位杆220,如晃动幅度过大,限位槽210受到限位杆220的阻碍,进而大大降低与限位槽210连接的锅具的晃动幅度,避免损坏称重机构100,同时也能够增加称重机构100测量锅具重量时的精度与稳定性。
综上,使用本发明实施例一提供的用于自动烹饪机的锅具称重装置,可在一定程度上改善自动烹饪机锅具的称重精度和稳定性。
在一种可行实施方案中,抱箍400上设置有多组贴片,抱箍400通过贴片与锅具外部连接,缓冲构件设置在贴片与锅具之间。如此设置,更加贴合锅具底部线条,此外,也可增大抱箍400与锅具的接触面积,以增加二者之间的摩擦力。
在本发明实施例一提供的用于自动烹饪机的锅具称重装置中,贴片具有凹面结构,凹面结构的凹陷侧贴合锅具的外部,如此可使贴片与锅具贴合程度更强,此外,凹面机构可设有防滑凸起,以增加贴片与锅具之间的摩擦力。
在具体应用过程中,锅具可具有凹槽,该凹槽可用于容置贴片,不仅增强贴合效果且具有限位功能。
贴片的材质可为陶瓷、玻璃、金属等耐热材料。
在本发明实施例一提供的用于自动烹饪机的锅具称重装置中,传力挂耳300的数量为四组,四组传力挂耳300等间隔设置在抱箍400上,且均与称重机构100连接。如此设置,即便未将锅具在抱箍400上放置平整,也能够保证称重数据的精准性。
传力挂耳300与称重机构100的数量相同,传力挂耳300与称重机构100均为四组且一一对应设置,以保证传力挂耳300与称重机构100对锅具起到支撑作用。
在其他实施方式中,传力挂耳300与称重机构100的数量相同且均可为多组,多组传力挂耳300一一对应设置在称重机构100上。
在使用本发明实施例一提供的用于自动烹饪机的锅具称重装置时,控制器接收到多个称重机构100发送的部分称重数据后,将各部分称重数据求和处理后,所得数据为锅具、锅具内目标物品、抱箍400、缓冲机构及传力挂耳300的称重数据。
优选地,称重机构100包括承重盘110、压力传感器120以及承重支架130,传力挂耳300设置在承重盘110上,承重盘110设置在压力传感器120上端,压力传感器120设置在承重支架130上,且与控制器电连接。
在一种优选实施方案中承重支架130可水平设置且与自动烹饪机的外壳610连接,压力传感器120可与承重支架130连接,承重盘110设置在压力传感器120的上端,传力挂耳300设置在承重盘110上,并可将受到的锅具、锅具内目标物品、抱箍400、缓冲构件的力以及自身重力通过承重盘110传递至压力传感器120,压力传感器120将受到的力转换为信号并信号传输至控制器。
在本发明实施例一中,承重盘110设有凹槽,传力挂耳300设置于凹槽内,如此设置,一方面可在一定程度上降低本发明实施例一提供的用于自动烹饪机的锅具称重装置的整体高度,另一方面,承重盘110的凹槽能够对传力挂耳300起到限位作用,防止传力挂耳300在承重盘110上发生偏移。
优选地,信号输出机构包括电子显示仪表,电子显示仪表与控制器电连接,用于显示称重数据。
在本发明实施例一中,限位槽210置于锅具的底部中心位置,限位杆220的一端与自动烹饪机的外壳610刚性连接,另一端设有限位开关,并且插入在限位槽210内,限位杆220的直径应小于限位槽210的内径。本发明实施例一提供的用于自动烹饪机的锅具称重装置,在一种工况下,限位杆220设有限位开关的一端插入到限位槽210中,且未接触到锅具底部,限位开关未触发;在另一种工况下,限位杆220设有限位开关的一端插入到限位槽210中,并且与锅具底部接触,设置在限位杆220的另一端的限位开关受到挤压,并将信号传输至控制器,触发报警,提醒操作人员锅具存在位置下沉的情况。
在一种可行实施方案中,用于自动烹饪机的锅具称重装置还包括承重板,承重板设置在限位杆220的一端与自动烹饪机的外壳610之间。承重板水平设置,限位杆220与承重板可拆卸连接。
在本实施例的一种优选实施方式中,限位杆220具有第一伸缩杆、第二伸缩杆以及锁定件,第一伸缩杆插设于第二伸缩杆内,锁定件分别于第一伸缩杆及第二伸缩杆连接,用于锁定第一伸缩杆与第二伸缩杆的相对位置。
在本实施例一中,第一伸缩杆与第二伸缩杆可发生相对运动,二者通过相对运动并结合锁定件实现限位杆220的高度调节及固定,如此设置,便于限位杆220的高度调整,以适应不同高度需求的使用场景。
第二实施例
请参照图4,本发明实施例二提供的料理机,包括控制系统、加料装置510、排烟装置520、加热装置530、烹饪锅具540以及上述实施例的用于自动烹饪机的锅具称重装置。
其中,用于自动烹饪机的锅具称重装置包括称重机构100、控制器、限位机构200、信号输出机构、报警机构、传力挂耳300、缓冲构件以及抱箍400,抱箍400套设于烹饪锅具540的外部,缓冲构件设置在抱箍400与烹饪锅具540之间;传力挂耳300数量至少四组且间隔分布在抱箍400上,多组传力挂耳300均与抱箍400连接;称重机构100连接传力挂耳300,用于测量传力挂耳300的受力;称重机构100连接控制器,并可将称重信号传输至控制器;控制器分别与信号输出机构及报警机构电连接;限位机构包括限位槽210以及限位杆220,限位槽210设置于烹饪锅具540的底部,限位杆220的一端与自动烹饪机的外壳连接,限位杆220的另一端设有限位开关,限位开关与控制器电连接。
在本发明实施例二提供的料理机中,控制系统分别与加料装置510、排烟装置520、加热装置530及用于自动烹饪机的锅具称重装置信号连接;加料装置510、排烟装置520、加热装置530均与烹饪锅具540连接;用于自动烹饪机的锅具称重装置与烹饪锅具540连接,测量烹饪锅具540的重量。
加料装置510设有加料流量计511及控制阀门512,用于自动烹饪机的锅具称重装置的信号输出机构连接控制系统,向控制系统输出称重信号;加料装置510的加料流量计511连接控制系统,向控制系统输出流量信号;控制系统连接控制阀门512,以调节控制阀门512的开关状态。
第三实施例
请参照图5,本发明实施例三提供的机器人,包括外壳610、控制面板620、交互模块、路径行走模块630以及上述实施例所述的料理机。
其中,料理机具有控制系统、加料装置510、排烟装置520、加热装置530、烹饪锅具540以及用于自动烹饪机的锅具称重装置,料理机的控制系统分别与加料装置510、排烟装置520、加热装置530及用于自动烹饪机的锅具称重装置信号连接;加料装置510、排烟装置520、加热装置530均与烹饪锅具540连接;用于自动烹饪机的锅具称重装置与烹饪锅具540连接,测量烹饪锅具540的重量。
在本发明实施例三提供的机器人中,控制面板620设置在外壳610上,交互模块、路径行走模块630及料理机均与控制面板620连接,且设置在外壳610内。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 用于自动烹饪机的锅具称重装置、料理机及机器人
- 用于自动烹饪机的锅具称重装置及其使用方法