高稳定度测控温系统在轨噪声评价方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明属于航天器热控制技术领域,高稳定度测控温系统在轨噪声评价方法。
背景技术
高稳定性热控技术是基于引力波空间探测技术试验卫星的具体载荷需求和工程实际应用,针对现行的热控技术难以实现频率在0.1mHz至0.1Hz之间,1mK/Hz
卫星在轨过程中,该卫星被控对象(即载荷设备)的性能容易受到温度变化引起的热变形的影响,为了保证被控对象性能的稳定性,需要构建稳定的温度环境,这首先需要精确测量被控对象的温度,并对温度数据进行评价。
测温组件、控温组件、被控对象构成了高稳定度测控温体系,其中测温组件用于测量温度,包括测温电路和测温元件,其中测温元件的噪声属于低量级;控温组件用于输出控温功率,控制被控对象达到温度稳定的要求,包含控温电路、控温加热回路及控温算法;被控对象通常为激光干涉仪和加速度计,但不局限于此。
卫星在轨的温度控制水平长期以来仅以时域温度的最大波动范围进行评判,温度的时域测量必须使用统计学方法进行统计,统计结果仅仅表征时域下的控温能力,明确传统意义上的控温效果。然而在有高稳定性热控需求的情况下,由于温度波动的范围很窄,测温噪声的影响不可忽略。引入噪声概念后,原有的温度评判标准不再适用。
发明内容
为了解决时域特性无法直接获知温度稳定度对被控对象探测性能的影响的问题,本发明建立了一套针对高稳定度测控温系统的在轨噪声评价方法,从时域和频域两方面进性分析。其中,获取温度变化的频域影响,可以判断测温噪声是否会对被控对象的探测性能产生不利影响;此外频域分析结果可以有效解决时域分析中难以确定温度波动扰动源的问题,通过频域峰值确定扰动频率,协助确定扰动源,针对性的进行热控设计和改进,优化控温效果。
具体技术方案如下:
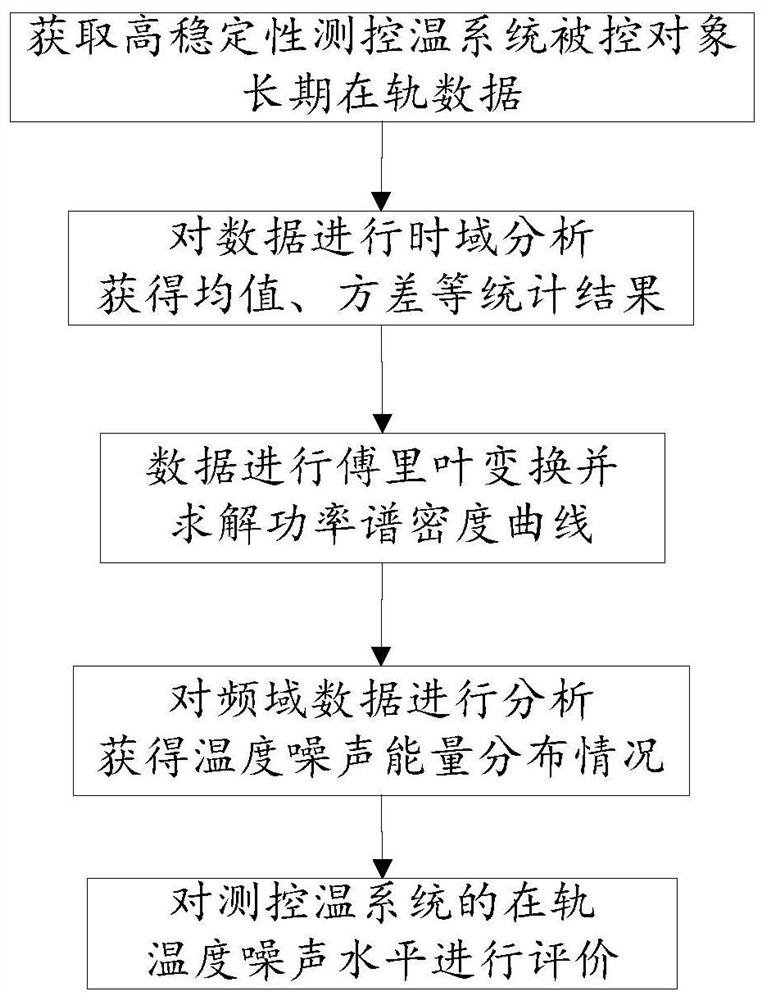
第一步:获取在轨被控设备温度数据。
第二步:使用统计方法获得数据按正态分布的均值、方差等结果。
第三步:对数据进行傅里叶变换,并求解功率谱密度,获得温度噪声能量分布情况。
第四步:经过上述时域、频域分析完成对高稳定度测控温系统在轨噪声水平的评价,确定温度扰动源对被控对象探测性能的影响。
有益效果
本发明确立了高稳定度测控温系统在轨噪声评价方法,其中,统计学方法下的时域分析弥补了频域中高稳定控温条件下噪声影响难以量化的问题;频域分析弥补了时域下无法获知是否影响被控设备探测的问题,频域分析协助确定了温度扰动源,从而进一步优化控温效果。使用本发明可以更好更全面的解释温度稳定度对被控设备测量系统的影响。
附图说明
图1为本发明的方法流程图。
图2为某引力波探测卫星的示意图。
图3为惯性传感器过境时段温度时域曲线。
图4为惯性传感器全时段温度时域曲线。
图5为惯性传感器全时段功率谱密度曲线。
具体实施方式
下面结合附图对本发明和实施效果进行详细描述。
本实施实例中研究对象为引力波应用技术先导试验卫星,卫星轨道高度630Km,降交点地方时为10:30,轨道为太阳同步轨道,如图2所示。该卫星的被控对象为激光干涉仪和加速度计,要求控温稳定度为优于±50mk。为实现高稳定度温度控制,测温组件选用四线制铂电阻组件,并采用了高稳定度测控温设备,具体包括1块测温和2块控温PCB板,最终安装在星内的堆栈组合体中。
卫星成功发射入轨后进行了高稳定度测控温系统的在轨控温性能测试。
下面对具体技术方案分步说明:
第一步:卫星在轨仅在过境时可以传输数据,故高稳定度测控温系统以1Hz频率向星务组件传送测控温数据,星务组件进行记录,在过境时通过数传组件对地下传数据。
被控设备为惯性传感器和激光干涉仪,取得的过境时段和全时段温度曲线如图3和图4所示,横轴为时间,纵轴为温度。其中过境时段样本数为600,持续10分钟;全时段样本数69600,持续19.33小时。
第二步:对上述数据进行时域分析,获得均值、标准差等统计数据结果,如表1所示。
第三步:对上述数据进行傅里叶变换,获得功率谱密度曲线如图5所示。
频域曲线显示噪声水平最好可维持在大约2.5mK/Hz
由此可以看出,被控对象探测敏感频段为大于0.1Hz,功率谱密度峰值范围在0.02~0.04Hz,两者不重叠,故温度波动不会对被控对象产生不利影响,影响度大约为2.5mK/Hz
频域下0.02~0.04Hz之间的波动峰值是由于控温设备的控制周期引起的,调整控温周期可以有效优化频域峰值的位置和振幅。
第四步:对上述时域和频域数据进行分析,并对结果进行评估如下:
1)短时间内的温度稳定性不能完全反应在轨全时段的温度稳定性。过境时段图3的温度稳定性明显好于全时段图4,这是由于全时段的温度涵盖了卫星阴影与阳照区,外热流的周期性波动导致全时段存在周期性温度波动。
2)图5表明在轨温度噪声控制在2.5mK/Hz
3)由图3可知,在轨主动控温回路引起的温度波动周期约25~50s,这与图5中0.02Hz~0.04Hz之间存在的噪声水平升高现象一致。即主动控温回路引起在轨被控对象的温度噪声为20mK/Hz
4)
5)表1
上述的说明,仅为本发明的实施例而已,非为限定本发明的实施例;凡熟悉该项技艺的人士,其所依本发明的特征范畴,所作的其它等效变化或修饰,皆应涵盖在本发明所申请专利范围内。
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
- 高稳定度测控温系统在轨噪声评价方法
- 高稳定度测控温系统在轨噪声评价方法