一种抓取冰块的机械手
文献发布时间:2023-06-19 09:43:16
技术领域
本发明属于抓取机械装置技术领域,具体涉及一种抓取冰块的机械手。
背景技术
在进行冰的研究前,需要使用锯骨机、切片机或电链锯对冰块进行切割。切割前需要实验人员徒手搬运,且切割时还需要实验人员用手扶住冰块以完成切割操作。众所周知,冰的表面光滑且温度低,单人徒手搬运不便,且表面低温容易损伤搬运人员的身体健康,同时使用电动工具切割时手扶冰块的危险性大。所以需要一种抓取冰块的机械手解决上述问题。
专利号为CN201520857867.9,名称为《一种箱子搬运抓手》的实用新型专利公开了一种箱子搬运抓手,但是其依靠自身夹持力不能搬运表面光滑的冰块,且该实用新型的体积较大不具有便携性,适用性受到限制。专利号为CN201020582397.7,名称为《低速箱子用抓手及机械臂》的实用新型专利虽然具有底部挡板,但是各挡板使用电动和液压分别,操作繁琐,功能单一且不方便携带。
发明内容
本发明的目的在于提供可以方便抓取各种尺寸冰块的一种抓取冰块的机械手。
本发明的目的通过如下技术方案来实现:包括左支架、右支架、中心支架和手柄;所述的左支架包括左支架壳体、左支架公头、外伸缩臂、内伸缩臂和伸缩底脚;所述的左支架壳体设置在中心支架的左侧,在左支架壳体内部右上方设有第一滑轮,在左支架壳体内部右下方设有第二滑轮;所述的左支架公头的左端与左支架壳体上部右端连接,左支架公头的右端伸入中心支架中并通过推力弹簧与中心支架右端连接;所述的外伸缩臂整体设置在左支架壳体内部,外伸缩臂顶面通过拉力弹簧与左支架壳体的顶面连接,在外伸缩臂顶面左侧设有第四滑轮,在外伸缩臂顶面右侧设有第三滑轮,在外伸缩臂底面左侧设有第五滑轮;所述的内伸缩臂上部设置在外伸缩臂内部,内伸缩臂的顶面通过拉力弹簧与外伸缩臂的顶面连接,内伸缩臂底部伸出左支架壳体,在内伸缩臂底部开设有直线滑道,在内伸缩臂顶面左侧设有第六滑轮,在内伸缩臂顶面右侧设有第七滑轮,在内伸缩臂底部右侧设有第八滑轮,第八滑轮位于伸缩底脚的上方;所述的伸缩底脚通过直线滑道与内伸缩臂的底部连接,且伸缩底脚整体长度大于内伸缩臂底部的直线滑道长度;所述的伸缩底脚前端成楔形,伸缩底脚的尾端通过推力弹簧与内伸缩臂外侧壁面连接;所述的中心支架内部左右两侧分别布置有传动滑轮组,在中心支架中部外侧设有握把;所述的手柄左右两侧通过直线滑道安装在中心支架下端,手柄与中心支架之间安装有推力弹簧,手柄左右两端通过齿条分别与布置在手柄左右两侧的皮带收紧棘轮连接;所述的皮带收紧棘轮安装在中心支架底面下端,在皮带收紧棘轮的轮轴内安装有棘齿,在皮带收紧棘轮上缠有皮带,手柄左右两侧皮带收紧棘轮上的皮带分别通过中心支架内部左右两侧的传动滑轮组进入左支架和右支架,进入左支架的皮带依次绕过第一滑轮、第二滑轮、第三滑轮、第四滑轮、第五滑轮、第六滑轮、第七滑轮、第八滑轮并固定在伸缩底脚的尾端;所述的右支架结构与左支架相同。
本发明还可以包括:
所述的中心支架上布置有皮带复位按钮;所述的皮带复位按钮布置在握把附近,皮带复位按钮通过控制线与手柄左右两侧的皮带收紧棘轮的轮轴内的棘齿相连,当皮带复位按钮按下后,皮带收紧棘轮轮轴处的棘齿失效,皮带收紧棘轮自由转动,皮带松弛。
在所述的中心支架左右两侧底部内壁上布置止滑器;所述的外伸缩臂左右两侧底部内壁上布置有止滑器;所述的左支架壳体左右两侧底部内壁上布置有止滑器;所述的中心支架上布置有自锁按钮;所述的自锁按钮布置在握把附近,自锁按钮通过控制线与所有止滑器连接,当自锁按钮被按动后,止滑器产生膨胀,从而固定左支架、右支架与中央支架的相对位置、固定内伸缩臂、外伸缩臂与左支架及右支架的相对位置。
所述的左支架壳体右端外壁上布置有条形防滑橡胶;所述的内伸缩臂右端的外壁上布置有梯形防滑橡胶,且梯形防滑橡胶设置在伸缩底脚与左支架壳体之间。
本发明的有益效果在于:
本发明提供了一种抓取冰块的机械手,为冰的加工人员提供一种方便抓取各种尺寸冰块的解决方案,主要运用于冰的加工领域。本发明具有扶住冰块的附加属性。即抓取冰块后,实验人员亦可通过该机械手间接扶住冰块,降低直接手扶冰块在锯骨机、链锯切割操作时的危险性。
附图说明
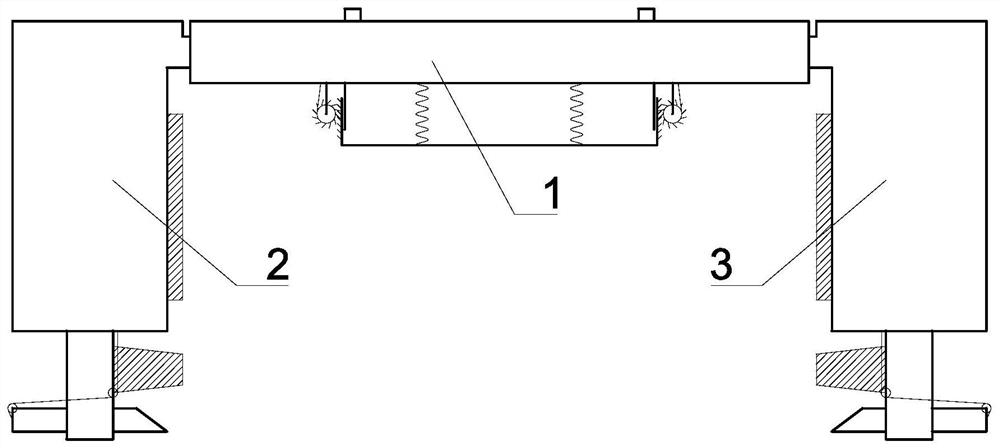
图1是本发明的总体结构示意图。
图2是本发明的水平伸缩机构的示意图。
图3是本发明的皮带收紧机构的示意图。
图4是本发明的纵向伸缩机构的主视图。
图5是本发明的纵向伸缩机构的侧视图。
具体实施方式
下面结合附图对本发明做进一步描述。
本发明涉及一种抓取机械装置,尤其涉及一种抓取冰的机械手。本发明旨在提供一种抓取冰的机械手,为冰的加工人员提供一种方便抓取各种尺寸冰块的解决方案,主要运用于冰的加工领域。
一种抓取冰块的机械手,包括左支架2、右支架3、中心支架1和手柄9;所述的左支架2包括左支架壳体、左支架公头6、外伸缩臂31、内伸缩臂30和伸缩底脚32;所述的左支架壳体设置在中心支架1的左侧,在左支架壳体内部右上方设有第一滑轮22,在左支架壳体内部右下方设有第二滑轮23;所述的左支架公头6的左端与左支架壳体上部右端连接,左支架公头6的右端伸入中心支架1中并通过推力弹簧13与中心支架1右端连接;所述的外伸缩臂31整体设置在左支架壳体内部,外伸缩臂31顶面通过拉力弹簧11与左支架壳体的顶面连接,在外伸缩臂31顶面左侧设有第四滑轮25,在外伸缩臂31顶面右侧设有第三滑轮24,在外伸缩臂31底面左侧设有第五滑轮26;所述的内伸缩臂30上部设置在外伸缩臂31内部,内伸缩臂30的顶面通过拉力弹簧12与外伸缩臂31的顶面连接,内伸缩臂30底部伸出左支架壳体,在内伸缩臂30底部开设有直线滑道,在内伸缩臂30顶面左侧设有第六滑轮27,在内伸缩臂30顶面右侧设有第七滑轮28,在内伸缩臂30底部右侧设有第八滑轮29,第八滑轮29位于伸缩底脚32的上方;所述的伸缩底脚32通过直线滑道与内伸缩臂30的底部连接,且伸缩底脚32整体长度大于内伸缩臂30底部的直线滑道长度;所述的伸缩底脚32前端成楔形,伸缩底脚32的尾端通过推力弹簧16与内伸缩臂30外侧壁面连接;所述的中心支架1内部左右两侧分别布置有传动滑轮组18、19、20,在中心支架1中部外侧设有握把8;所述的手柄9左右两侧通过直线滑道5安装在中心支架1下端,手柄9与中心支架1之间安装有推力弹簧14、15,手柄9左右两端通过齿条10分别与布置在手柄左右两侧的皮带收紧棘轮21连接;所述的皮带收紧棘轮21安装在中心支架1底面下端,在皮带收紧棘轮21的轮轴内安装有棘齿,在皮带收紧棘轮21上缠有皮带,手柄9左右两侧皮带收紧棘轮上的皮带分别通过中心支架1内部左右两侧的传动滑轮组18进入左支架2和右支架3,进入左支架2的皮带4依次绕过第一滑轮22、第二滑轮23、第三滑轮24、第四滑轮25、第五滑轮26、第六滑轮27、第七滑轮28、第八滑轮29并固定在伸缩底脚32的尾端;所述的右支架3结构与左支架相同。
所述的中心支架1上布置有皮带复位按钮37;所述的皮带复位按钮37布置在握把8附近,皮带复位按钮37通过控制线与手柄9左右两侧的皮带收紧棘轮21的轮轴内的棘齿相连,当皮带复位按钮37按下后,皮带收紧棘轮轮轴处的棘齿失效,皮带收紧棘轮自由转动,皮带松弛。在所述的中心支架1左右两侧底部内壁上布置止滑器33;所述的外伸缩臂31左右两侧底部内壁上布置有止滑器34;所述的左支架壳体左右两侧底部内壁上布置有止滑器34;所述的中心支架上布置有自锁按钮35;所述的自锁按钮35布置在握把8附近,自锁按钮35通过控制线与所有止滑器连接,当自锁按钮35被按动后,止滑器产生膨胀,从而固定左支架2、右支架3与中央支架1的相对位置、固定内伸缩臂30、外伸缩臂31与左支架2及右支架3的相对位置。所述的左支架壳体右端外壁上布置有条形防滑橡胶39;所述的内伸缩臂右端的外壁上布置有梯形防滑橡胶40,且梯形防滑橡胶40设置在伸缩底脚32与左支架壳体之间。
实施例1:
本发明的一种抓取冰块的机械手为左右对称结构,简单起见,仅介绍该装置的左半部分。
结合图1,装置包括3部分,分别是中心支架1、左支架2、右支架3.
结合图2,左支架公头6套在中心支架母头7内,中心支架母头7内壁和左支架公头6外壁间布置有直线滑道5,中心支架1和左支架2通过推力弹簧13和上述直线滑道5相互结合。中心支架1和左支架2可以相对自由滑动但不会分离。当无外力作用时,左支架公头6能在推力弹簧13的拉力作用下伸出中心支架母头7外。滑轮19固定在左支架2上,滑轮20和滑轮18固定在中心支架1上。
结合图3,手柄9和中心支架1通过直线滑道8相连,受到推力弹簧14和推力弹簧15的推力作用。手柄两侧固定有齿条。手柄9被操作人员手掌握动时,所述的齿条10能上下往复运动,从而带动皮带收紧棘轮21单向转动。所述的齿条10和皮带收紧棘轮21之间通过齿轮齿条传动,当手柄9不被握动时,齿条10和皮带收紧棘轮21之间无接触。所述的皮带收紧棘轮21的轮轴内安装有棘齿。所述皮带收紧棘轮21上缠有数圈皮带,且固定在中心支架1上。皮带复位按钮37布置在握把8附近,通过控制线和两皮带收紧棘轮21轮轴内的棘齿相连,当皮带复位按钮37按下后,皮带收紧棘轮21轮轴处的棘齿失效,皮带收紧棘轮21自由转动,皮带可以自由松弛。
结合图4、图5,内伸缩臂30套在外伸缩臂31内,受拉力弹簧12和直线滑道限制。外伸缩臂31套在左支架2的空腔内,受拉力弹簧11和直线滑道的限制。伸缩底脚32前端成楔形,通过直线滑道与内伸缩臂30的底部相连,伸缩底脚32的尾端和内伸缩臂30的底部之间连有推力弹簧16。滑轮24和滑轮25固定在外伸缩臂31的顶端,滑轮26固定在外伸缩臂31的底端,滑轮27和滑轮28固定在内伸缩臂30的顶端,滑轮29固定在内伸缩臂30的底端,滑轮23和滑轮22固定在左支架2上。
结合图2、图3、图4、图5,所述的拉力弹簧或推力弹簧具有如下的弹力关系:推力弹簧16产生的推力,大于拉力弹簧12产生的拉力,等于拉力弹簧11产生的拉力,大于推力弹簧13产生的推力,大于皮带收紧棘轮21的轮轴处发条产生的使皮带收紧的力。所述的弹簧排序可以实现在皮带收紧时,下述机构能够以下述约定的顺序执行规定动作:左支架公头6收缩进中心支架母头7中,从而左支架2靠近中心支架1,直至夹紧冰块,进而实现匹配拟抓取冰块宽度;内伸缩臂30从外伸缩臂31内部的空腔内向下伸出,外伸缩臂31从左支架2的空腔内继续向下伸出;内伸缩臂30底部触地后,皮带上的张力将大于推力弹簧16的推力,伸缩底脚32会在皮带4的拉力作用下伸出,前端楔形将楔入拟抓取冰块底部。至此,完成对冰块的抓取动作。
结合图2、图3、图4、图5,左支架公头6和中心支架母头7之间布置有止滑器33,所述止滑器33固定在中心支架母头7内壁上。内伸缩臂30和外伸缩臂31之间布置有止滑器34,所述的止滑器34固定在外伸缩臂内壁上,外伸缩臂31和左支架2之间布置有止滑器33,所述的止滑器34固定在左支架2空腔内壁上。所述止滑器33和止滑器34通过控制线和握把8处的自锁按钮35相连。当自锁按钮35被按动后,所述的止滑器33和止滑器34会产生膨胀,从而固定左支架2、右支架3与中央支架1的相对位置,固定内伸缩臂30、外伸缩臂31与左支架2及右支架3的相对位置。
结合图2、图4、图5,左支架2和内伸缩臂30的外壁布置有防滑橡胶39和防滑橡胶40。上述防滑橡胶39和防滑橡胶40的外表面处于同一平面。可以和拟抓取冰块的侧面紧密接触,防止冰块向下滑脱。
本机械手可以自由抓取长20-60厘米,高10-90厘米,宽度任意的冰块。该发明最小形态长30厘米,高35厘米,厚10厘米;完全展开形态长70厘米,高95厘米,厚10厘米。操作人员通过往复握动手柄收紧皮带,皮带带动左支架、右支架、外伸缩臂、内伸缩臂和伸缩底脚运动,实现抓取动作。具体操作方法如下:
抓取冰块前的准备:
在执行抓取动作前,操作人员握住握把8,按下自锁按钮35取消锁定,令左支架公头6和右支架公头完全从中心支架母头7中弹出。再令本机械手所在平面垂直于地面,然后将本机械手置于拟抓取冰块上表面,令本机械手的中心支架1下表面和冰块上表面相接触。
此时由于推力弹簧13的推力作用,左支架2和右支架3处于远离中心支架1的极限位置。同时,内伸缩臂30和外伸缩臂31在拉力弹簧11和拉力弹簧12的拉力作用下完全缩入收纳在左支架2的空腔内。同时,伸缩底脚32在推力弹簧16的推力作用下,处于极限位置,即楔形一侧隐藏在内伸缩臂30内,另一侧露在内伸缩臂30外。同时,皮带4上无张力,处于松弛状态。
抓取冰块:
开始进行抓取操作时,操作人员手掌不断握动手柄9,手柄9带动齿条10上下移动,驱动皮带收紧棘轮21单向转动。因所述的皮带收紧棘轮21内部装有棘轮,所述的皮带收紧棘轮21能单向转动不断收紧皮带,依次带动左支架2和右支架3向中央支架1收缩,内伸缩臂30和外伸缩臂31向下伸出,内伸缩臂30触地后伸缩底脚32伸出,伸缩底脚前端的楔形区嵌入冰块底部,实现对冰块的抓取动作。操作人员使用拇指按下手部自锁按钮35,所述动作通过控制线传递给止滑器34和止滑器33,从而固定左支架2、右支架3与中央支架1的相对位置,固定内伸缩臂30、外伸缩臂31与左支架2及右支架3的相对位置。
放下冰块:
在完成抓取冰块的动作后,操作人员按下皮带复位按钮37,皮带失去了被皮带收紧棘轮21的约束后失去了拉力,伸缩底脚32被推力弹簧16推动,缩入内伸缩臂30内部归位,即伸缩底脚32被从冰块底面抽回。该机械手完成了放下冰块的动作。由于止滑器33和止滑器34依然处于碰撞状态,因此左支架2、右支架3与中央支架1的相对位置不变,内伸缩臂30、外伸缩臂31与左支架2及右支架3的相对位置不变。
再次抓取冰块:
如果再次抓取同尺寸的冰块,则在完成上述“抓取冰块前的准备”动作后,直接反复握动手柄9。完成上述“抓取冰块”的动作。
如果需要抓取其他尺寸的冰块,需要按动自锁按钮35以取消止滑器33和止滑器34的膨胀动作,使本机械手完全处于上述“抓取冰块前的准备”动作前的初始状态。然后从上述“抓取冰块前的准备”动作开始操作。
协助固定冰块:
本发明作为连接操作人员和冰块之间桥梁,方便操作人员握持冰块。降低直接徒手接触冰块进行电动工具切割等操作时的危险性,减小操作人员直接徒手接触冰块时冰块表面低温对操作人员产生的健康潜在危害。
在完成上述“放下冰块”动作后,不按动自锁按钮35,此时本发明未恢复到初始状态。即左支架2和右支架3未完全伸开到初始位置,内伸缩臂30和外伸缩臂31依然在左支架2外。操作人员直接将本发明套在冰块上,使左支架2底部的伸缩底脚31和右支架3底部的伸缩底脚31分别在两个相对、相互平行的平面。然后用手握动手柄9,此时皮带将会收紧。直至所述的两侧伸缩底脚32伸出夹紧冰块的两个相对、相互平行的平面,实现对冰块的固定。
此时操作人员即可以抓住本发明从而间接控制冰块的空间位置,避免了与冰块的直接接触。
收纳携带:
按下自锁按钮35取消锁定后,整个机械手将恢复至初始状态,即左支架2和右支架3完全伸出,内伸缩臂30、外伸缩臂31完全缩入左支架2的空腔中。双手向内挤压左支架2和右支架3,直至所述的左支架公头6和右支架公头完全卡入中心支架1中,按下自锁按钮35锁定装置。至此,完成收纳动作,该机械手处于最小形态,方便携带。
与现有技术相比,本发明的有益效果是:
1.本装置能够自动判断所抓取冰块的高度,自动在适当高度伸出底角铲起冰块。
2.自动识别冰块长宽高三围尺寸的装置使用一套操纵装置操纵,识别过程中不需要人工转换。
3.可以抓取任意尺寸的冰块。在单人体力能够承担的情况下,能抓取并搬运宽20-60厘米,高10-90厘米,任意长度的冰块。
4.具有扶住冰块的附加属性。即抓取冰块后,实验人员亦可通过该机械手间接扶住冰块,降低直接手扶冰块在锯骨机、链锯切割操作时的危险性。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种抓取冰块的机械手
- 一种抓取机械手装置及具有该抓取机械手装置的机器人