一种用于电力巡检的无人机飞行控制方法及系统
文献发布时间:2023-06-19 09:49:27
技术领域
本发明涉及无人机技术领域,具体为一种用于电力巡检的无人机飞行控制方法及系统。
背景技术
随着经济的快速发展,无人机电力巡检工作已成为常态,无人机在室外复杂环境下能稳定工作已成为基本要求。
传统的无人机自动降落技术是在起飞的时候记录home点,在根据该home点返航和自动降落。但某些特殊使用工况下,如室外大山环境下进行无人机电力巡检时,会由于地理环境的影响,难以找到平整的无人机降落位置,因此很容易由于GPS定位误差导致无人机无法精准降落到预定地点,而是降落到沟里或坑里,导致炸机事故发生。
发明内容
针对现有技术的不足,本发明提供了一种用于电力巡检的无人机飞行控制方法及系统,其可以在无人机降落过程中通过宽、窄两种视场,以对降落靶标进行快速识别和定位,实现无人机的精准降落控制,有效防止炸机情况发生。
为实现上述目的,本发明提供如下技术方案:
提供了一种无人机降落控制方法,其包括如下步骤:
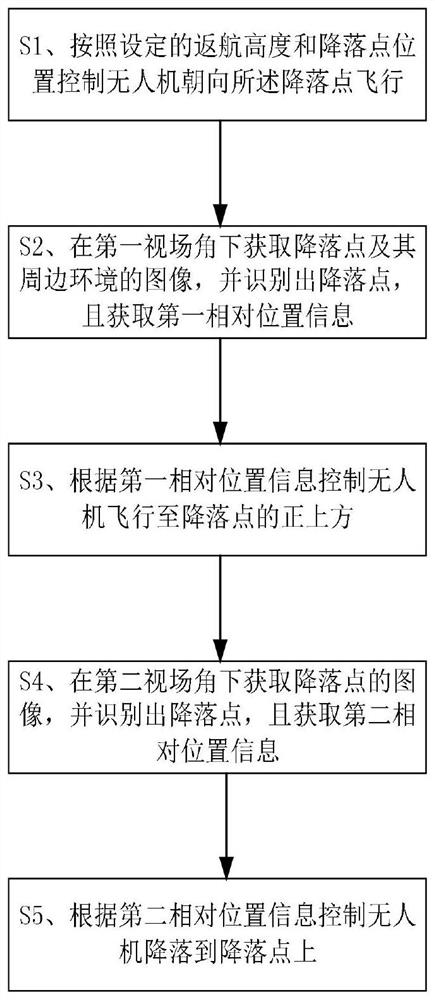
S1、按照设定的返航高度和降落点位置控制无人机朝向所述降落点飞行;
S2、开启第一成像设备,以在第一视场角下获取降落点及其周边环境的图像,并从中识别出降落点,且通过视觉算法等实时获取无人机与降落点的第一相对位置信息;
S3、根据所述无人机与降落点的第一相对位置信息控制无人机飞行至所述降落点的正上方;
S4、开启第二成像设备,以在第二视场角下获取降落点的图像,并从中识别出降落点,且获取无人机与降落点的第二相对位置信息;
以及S5、根据所述无人机与降落点的第二相对位置信息控制无人机降落到降落点上,以完成无人机的精准降落。
优选的,所述第一相对位置信息包括无人机相对降落点的距离。
优选的,所述第二相对位置信息包括无人机相对降落点的高度。
优选的,所述第一视场角大于第二视场角。
还提供一种可实现上述无人机飞行控制方法的无人机飞行控制系统,其包括:
第一成像设备,其用于提供第一视场角,且在第一视场角下获取降落点及其周边环境的图像,并从中识别出降落点;
第二成像设备,其用于提供第二视场角,且在第二视场角下获取降落点的图像,并从中识别出降落点;
位置计算单元,其用于通过视觉算法等实时获取无人机与降落点的第一相对位置信息以及第二相对位置信息;
飞控单元,其连接所述位置计算单元,用于根据所述第一相对位置信息控制无人机朝向所述降落点飞行,且位于降落点正上方,以及根据所述第二相对位置信息控制无人机降落到所述降落点上。
优选的,所述第一成像设备包括第一云台、第一相机和第一图像识别单元,所述第一云台用于提供第一视场角,且带动所述第一相机运动,以在第一视场角下获取降落点及其周边环境的图像,所述第一图像识别单元用于从图像中识别出降落点。
优选的,所述第二成像设备包括第二云台、第二相机和第二图像识别单元,所述第二云台用于提供第二视场角,且带动所述第二相机运动,以在第二视场角下获取降落点的图像,所述第二图像识别单元用于从图像中识别出降落点。
与现有技术相比,本发明具备以下有益效果:
本发明可基于宽、窄两种视场对降落点进行快速识别和定位技术,在无人机返航时通过宽视场(即第一视场角)对降落点及其周边环境进行快速识别,解算出无人机与降落点的相对位置信息,进而控制无人机进行粗返航定位;在降落阶段使用窄视场(即第二视场角)的对降落点进行精准识别,最终使无人机进行精准降落到降落点上,从而大大提高电力巡检任务、室外复杂环境下的无人机降落安全性能。
附图说明
图1为本发明中无人机飞行控制方法的步骤流程图;
图2为本发明中无人机飞行控制系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:
如图1所示,本实施例中的无人机飞行控制方法可适用于基于无人机的电力巡检,该方法具体包括:
S1、按照设定的返航高度和降落点位置控制无人机朝向所述降落点飞行;所述降落点可以是固定降落点;
S2、当无人机与降落点的距离满足预设条件时(如两者的距离为20m时),开启第一成像设备,以在第一视场角下获取降落点及其周边环境的图像,并从中识别出降落点,且通过视觉算法等实时获取无人机与降落点的第一相对位置信息,包括无人机相对降落点的距离等;
S3、根据所述无人机与降落点的第一相对位置信息控制无人机飞行至所述降落点的正上方,以完成无人机基于降落点的初步定位;
S4、开启第二成像设备,以在第二视场角下获取降落点的图像,并从中识别出降落点,且通过视觉算法等实时获取无人机与降落点的第二相对位置信息,包括无人机相对降落点的高度等;
以及S5、根据所述无人机与降落点的第二相对位置信息控制无人机降落到降落点上,以完成无人机的精准降落。
本实施例中,所述第一视场角大于第二视场角,由此可基于宽、窄两种视场对降落点进行快速识别和定位技术,即,在无人机返航时通过宽视场(即第一视场角)对降落点及其周边环境进行快速识别,解算出无人机与降落点的相对位置信息,进而控制无人机进行粗返航定位;在降落阶段使用窄视场(即第二视场角)的对降落点进行精准识别,最终使无人机进行精准降落到降落点上,从而大大提高电力巡检任务、室外复杂环境下的无人机降落安全性能。
实施例2:
本实施例提供了一种可实现实施例1中所述无人机飞行控制方法的无人机飞行控制系统,如图2所示,其包括:
第一成像设备1,其用于提供第一视场角,且在第一视场角下获取降落点及其周边环境的图像,并从中识别出降落点;
第二成像设备2,其用于提供第二视场角,且在第二视场角下获取降落点的图像,并从中识别出降落点;
位置计算单元3,其用于通过视觉算法等实时获取无人机与降落点的第一相对位置信息以及第二相对位置信息;所述第一相对位置信息包括无人机相对降落点的距离等,第二相对位置信息,包括无人机相对降落点的高度等;且所述第一视场角大于第二视场角;
飞控单元4,其连接所述位置计算单元3,用于根据所述第一相对位置信息控制无人机朝向所述降落点飞行,且位于降落点正上方,以及根据所述第二相对位置信息控制无人机降落到所述降落点上。
具体的,所述第一成像设备1包括第一云台、第一相机和第一图像识别单元,所述第一云台用于提供第一视场角,且带动所述第一相机运动,以在第一视场角下获取降落点及其周边环境的图像,所述第一图像识别单元用于从图像中识别出降落点;
所述第二成像设备2包括第二云台、第二相机和第二图像识别单元,所述第二云台用于提供第二视场角,且带动所述第二相机运动,以在第二视场角下获取降落点的图像,所述第二图像识别单元用于从图像中识别出降落点。
综上所述,本发明可基于宽、窄两种视场对降落点进行快速识别和定位技术,在无人机返航时通过宽视场(即第一视场角)对降落点及其周边环境进行快速识别,解算出无人机与降落点的相对位置信息,进而控制无人机进行粗返航定位;在降落阶段使用窄视场(即第二视场角)的对降落点进行精准识别,最终使无人机进行精准降落到降落点上,从而大大提高电力巡检任务、室外复杂环境下的无人机降落安全性能。
需要说明的是,上述实施例1-2中的技术特征可进行任意组合,且组合而成的技术方案均属于本申请的保护范围。在本文中,诸如术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种用于电力巡检的无人机飞行控制方法及系统
- 一种用于电力巡检的无人机飞行控制方法及装置