一种车间起重用悬臂式起重机及其使用方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明属于起重机技术领域,具体涉及一种车间起重用悬臂式起重机及其使用方法。
背景技术
起重机是指在一定范围内垂直提升和水平搬运重物的多动作起重机械。又称天车,航吊,吊车。轮胎起重机的主要特点是:其行驶驾驶室与起重操纵室合二为一、是由履带起重机(履带吊)演变而成,将行走机构的履带和行走支架部分变成有轮胎的底盘,克服了履带起重机(履带吊)履带板对路面造成破坏的缺点,属于物料搬运机械。桥式起重机是横架于车间、仓库和料场上空进行物料吊运的起重设备。由于它的两端坐落在高大的水泥柱或者金属支架上,形状似桥。桥式起重机的桥架沿铺设在两侧高架上的轨道纵向运行,可以充分利用桥架下面的空间吊运物料,不受地面设备的阻碍。它是使用范围最广、数量最多的一种起重机械。
目前常用的悬臂式起重机在车间使用时,大都不便于调节起重机悬臂和钩爪的角度,在车间通过钩爪钩取物品时存在诸多不便,便于调节起重机悬臂和钩爪角度的起重机又存在当起重机悬臂和钩爪调节角度时起重机重心不稳的问题,重心不稳十分容易造成起重机损坏,从而导致意外事故发生,为了解决这一问题提出了一种车间起重用悬臂式起重机。
发明内容
本发明的目的在于提供一种车间起重用悬臂式起重机及其使用方法,旨在解决现有技术中的悬臂和钩爪角度调节时起重机重心不稳的问题。
为实现上述目的,本发明提供如下技术方案:
一种车间起重用悬臂式起重机及其使用方法,包括:
空心立柱;
液压缸,所述液压缸设置于空心立柱内;
辅助滑动机构,所述辅助滑动机构设置于空心立柱内,且辅助滑动机构与液压缸相连接,所述辅助滑动机构通过液压缸实现升降;
夹持机构,所述夹持机构设置于空心立柱的右侧,所述夹持机构用以实现对物品的夹持;
卷线机构,所述卷线机构设置于夹持机构的上侧,所述卷线机构与夹持机构相连接,所述卷线机构用以实现对夹持机构的收放;
移动机构,所述移动机构设置于空心立柱的右侧,所述移动机构与卷线机构相连接,所述移动机构用以实现对卷线机构的移动;
升降机构,所述升降机构设置于空心立柱的右侧,所述升降机构位于移动机构的下侧;
第一支撑机构,所述第一支撑机构设置于空心立柱的右侧,所述第一支撑机构用以实现支撑移动机构;
角度调节机构,所述角度调节机构设置于空心立柱的下侧,所述角度调节机构用以实现支撑空心立柱和液压缸;
底部支撑机构,所述底部支撑机构设置于空心立柱的下侧,所述角度调节机构位于底部支撑机构内,所述底部支撑机构用以实现容纳角度调节机构;
第二支撑机构,所述第二支撑机构设置于角度调节机构的下侧,所述第二支撑机构用以实现支撑底部支撑机构,最终可以实现在调节悬臂和钩爪的角度时提高了起重机的稳定性,防止起重机因为中心不稳损坏,进而提高了起重机的使用寿命,同时防止了车间发生意外。
作为本发明一种优选的方案,所述空心立柱包括第一滑槽、弧形槽和第一固定板,所述第一滑槽设置为两个,两个所述第一滑槽分别开设于空心立柱的左右两端,所述弧形槽设置为两个,两个所述弧形槽均开设于空心立柱的下端,所述第一固定板固定连接于空心立柱的右端,所述液压缸位于空心立柱内,所述辅助滑动机构包括辅助滑块、T形滑块和T形滑板,所述辅助滑块滑动连接于空心立柱内,且辅助滑块固定连接于液压缸的伸长端,所述T形滑块固定连接于辅助滑块的左端,且T形滑块滑动连接于位于左侧的第一滑槽内,所述T形滑板固定连接于辅助滑块的右端,且T形滑板滑动连接于位于右侧的第一滑槽内。
作为本发明一种优选的方案,所述夹持机构包括保护壳、第一安装孔、气缸、移动齿条、间歇齿轮和钩爪,所述保护壳设置于空心立柱的右侧,所述第一安装孔开设于保护壳内,所述气缸固定连接于保护壳的上内壁,所述移动齿条固定连接于气缸的伸长端,所述间歇齿轮设置为两个,所述间歇齿轮通过铰轴活动交接于保护壳的前后内壁之间,所述钩爪设置为两个,所述钩爪固定连接于间歇齿轮的表面,所述移动齿条与间歇齿轮相啮合。
作为本发明一种优选的方案,所述卷线机构包括T形限位杆、第一连接件、第二固定板、第一转杆、第二伺服电机、L形固定架、第二转杆、第一皮带轮、第一传动皮带、钢绳和第二连接件,所述T形限位杆设置于空心立柱的右侧,所述第一连接件套设于T形限位杆的表面,所述第二固定板设置于空心立柱的右侧,所述第一转杆转动连接于第一连接件和第二固定板之间,所述第二伺服电机固定连接于第一连接件的前端,所述第二伺服电机的输出端活动贯穿第一连接件的前端,且第二伺服电机的输出端固定连接于第一转杆的前端,所述L形固定架固定连接于第二伺服电机的前端,所述第二连接件设置为两个,两个所述第二连接件均套设于第一转杆的表面,所述第二转杆转动连接于两个第二连接件之间,且第二转杆的前端向外延伸,所述第一皮带轮设置为两个,两个所述第一皮带轮分别固定连接于第二转杆和第二伺服电机的输出端表面,所述第一传动皮带套设于两个第一皮带轮的表面,且两个第一皮带轮通过第一传动皮带传动连接,所述钢绳固定连接于第一转杆的表面,且钢绳缠绕于第一转杆和第二转杆的表面,所述保护壳固定连接于钢绳的另一端。
作为本发明一种优选的方案,所述移动机构包括工字横梁、第二滑槽、第一安装槽、固定齿条、移动齿轮、滑孔、第一伺服电机、限位滑板、第一限位滑块和第二限位滑块,所述工字横梁固定连接于T形滑板的右端,所述第二滑槽设置为四个,每两个所述第二滑槽设置为一组,两组所述第二滑槽分别开设于工字横梁的上下两端,且两组第二滑槽对称设置,所述第一安装槽开设于工字横梁的右端,所述固定齿条固定连接于第一安装槽的下内壁,所述移动齿轮啮合连接于固定齿条的上端,所述T形限位杆固定连接于移动齿轮的前端中心处,所述滑孔设置为两个,两个所述滑孔分别开设于工字横梁的前后两端,且两个滑孔均与第一安装槽相连通,所述第一伺服电机的输出端固定连接于移动齿轮的后端中心处,所述第一伺服电机的输出端于滑孔相匹配,所述限位滑板设置为两个,两个所述限位滑板分别固定连接于第一伺服电机的左右两端,所述第一限位滑块设置为两个,所述第一限位滑块固定连接于限位滑板的上端,且第一限位滑块滑动连接于位于上侧的第二滑槽内,所述第二限位滑块设置为两个,所述工字横梁固定连接于限位滑板的下端,且第二限位滑块滑动连接于位于下侧的第二滑槽内。
作为本发明一种优选的方案,所述升降机构包括所述第一螺杆、第三伺服电机、主动皮带轮、从动皮带轮、连接皮带、弧形安装块和螺母,所述第一螺杆、主动皮带轮、从动皮带轮、连接皮带和弧形安装块设置均两个,所述弧形安装块固定连接于空心立柱的表面,所述第一螺杆转动连接于弧形安装块的下端,所述第三伺服电机设置于空心立柱的右侧,所述主动皮带轮固定连接于第三伺服电机的输出端表面,所述从动皮带轮固定连接于第一螺杆的表面,所述连接皮带套设于主动皮带轮和从动皮带轮的表面,且主动皮带轮和从动皮带轮通过连接皮带传动连接,所述螺母设置为四个,四个所述螺母分别螺纹连接于两个第一螺杆的表面。
作为本发明一种优选的方案,所述第一支撑机构包括安装套筒、支撑架、第一从动齿轮、第四伺服电机、第一主动齿轮、第三固定板和U形固定架,所述安装套筒、支撑架、第一从动齿轮、第四伺服电机、第一主动齿轮、第三固定板和U形固定架均设置为两个,所述安装套筒转动连接于两个螺母之间,且安装套筒套设于第一螺杆的表面,所述支撑架固定连接于安装套筒的表面,所述第一从动齿轮固定连接于安装套筒的表面,且安装套筒位于支撑架的下侧,所述第三固定板固定连接于螺母的表面,所述U形固定架固定连接于第三固定板的下端,所述第四伺服电机固定连接于U形固定架内,所述第四伺服电机的输出端活动贯穿第三固定板的下端,所述第一主动齿轮固定连接于第三固定板的输出端表面,且第一主动齿轮与第一从动齿轮相啮合。
作为本发明一种优选的方案,所述角度调节机构包括驱动电机、第二主动齿轮、第二从动齿轮和T形圆柱,所述驱动电机设置于空心立柱的下侧,所述第二主动齿轮固定连接于驱动电机的输出端表面,所述第二从动齿轮与第二主动齿轮啮合连接,所述T形圆柱设置于第二从动齿轮内,所述第二从动齿轮固定连接于T形圆柱的表面,所述空心立柱和液压缸均固定连接于T形圆柱的上端,两个所述第一螺杆均转动连接于第二从动齿轮的上端,所述底部支撑机构包括底座、第二安装槽、第二安装孔、限位环、第四固定板和第三安装孔,所述底座设置于空心立柱的下侧,所述第二安装槽开设于底座内,所述第二安装孔开设于第二安装槽内,所述限位环固定连接于底座内,所述限位环位于第二安装槽的下侧,所述第四固定板固定连接于空心立柱的表面,且驱动电机固定连接于第四固定板的上端,所述第三安装孔设置为四个,四个所述第三安装孔均开设于底座内,所述T形圆柱滑动连接第二安装槽内,且T形圆柱的下部凸起活动插接于限位环内。
作为本发明一种优选的方案,所述第二支撑机构包括第三转杆、第五伺服电机、第二皮带轮、第二传动皮带、第三主动齿轮、第四转杆、第三从动齿轮、安装板、螺纹孔、第二螺杆、限位块、配重块、第三皮带轮和第三传动皮带,所述第三转杆转动连接于底座与第二从动齿轮之间,所述第五伺服电机固定连接于限位环的下端,所述第二皮带轮设置为两个,两个所述第二皮带轮分别固定连接于第三转杆的表面和第五伺服电机的输出端表面,所述第二传动皮带套设于两个第二皮带轮的表面,且两个第二皮带轮通过第二传动皮带传动连接,所述第三主动齿轮固定连接于第三转杆的表面,且第三主动齿轮位于第二皮带轮的下侧,所述第四转杆、第三从动齿轮、第二螺杆、限位块、配重块和第三传动皮带均设置为四个,所述安装板、螺纹孔和第三皮带轮均设置为八个,所述第四转杆转动连接于底座和限位环之间,所述第三从动齿轮固定连接于第四转杆的表面,所述第三主动齿轮和第三从动齿轮相啮合,所述安装板固定连接于第三安装孔的上下内壁,所述螺纹孔开凿于安装板的上端,所述第二螺杆螺纹连接于螺纹孔内,所述限位块和配重块分别固定连接于第二螺杆的上下两端,所述第三皮带轮分别固定连接于第四转杆和第二螺杆的表面,所述第三传动皮带套设于两个第三皮带轮的表面,且两个第三皮带轮通过第三传动皮带传动连接。
一种车间起重用悬臂式起重机及其使用方法的使用方法,包括如下步骤:
S1、当需要对物品钩取时:
S11、调节钩爪位置:启动第一伺服电机正转,第一伺服电机的正转带动了移动齿轮正转,由于固定齿条与移动齿轮相啮合,所以移动齿轮正转使得移动齿轮向右移动,移动齿轮的向右移动使得T形限位杆在滑孔内滑动,移动齿轮的向右移动带动了限位滑板向右滑动,限位滑板的向右移动使得第二固定板向右移动,钩爪移动至合适位置时关闭第一伺服电机,从而完成对钩爪位置的调整,以便于对物品的钩取;
S12、放线:当钩爪调整好位置之后,启动第二伺服电机反转,第二伺服电机的反转使得第二伺服电机的输出端反转,第二伺服电机的输出端反转使得第一转杆和第二转杆同时反转,第一转杆和第二转杆的反转使得钢绳向下移动,钢绳的向下移动使得钩爪向下移动,当钩爪向下移动至待钩取物品时关闭第二伺服电机;
S13、钩取物品:启动气缸收缩,气缸的收缩使得移动齿条向上移动,由于移动齿条和两个间歇齿轮啮合,所以移动齿条向上移动使得两个间歇齿轮表面带动钩爪向相靠近的一端移动,当两个钩爪将物品钩取稳定后关闭气缸集合,最终完成了对物品的钩取,然后反向操作上述步骤即可完成对物品的移动;
S14、当需要对悬臂进行角度调解时:启动驱动电机转动,驱动电机的转动带了第二主动齿轮转动,第二主动齿轮的转动使得第二从动齿轮转动,第二从动齿轮的转动,通过第二从动齿轮的转动带动空心立柱和液压缸转动,进而使得悬臂转动;
S2、第一支撑保护:
S21、支撑架高度调节:启动第三伺服电机正转,第三伺服电机的正转使得主动皮带轮正转,主动皮带轮的正转通过连接皮带带动了从动皮带轮正转,从动皮带轮的正转使得第一螺杆正转,第一螺杆的正转使得螺母在第一螺杆的表面向上移动;
S3、直接角度调节:启动第四伺服电机反转,第四伺服电机的反转带动第一主动齿轮反转,第一主动齿轮的反转使得第一从动齿轮正转,第一从动齿轮的正转使得安装套筒向相对的一侧移动,当支撑架位于工字横梁的下侧时关闭第四伺服电机,最终完成了对工字横梁的支撑保护;
S4、第二支撑保护:启动第五伺服电机正转,第五伺服电机的正转使得第二皮带轮正转,第二皮带轮的正转通过第二传动皮带带动第三转杆正转,第三转杆的正转带动了第三主动齿轮正转,由于第三主动齿轮与第三从动齿轮相啮合所以第三主动齿轮的正转带动了第三从动齿轮反转,第三从动齿轮的反转使得第四转杆反转,第四转杆的反转使得第三皮带轮反转,第三皮带轮的反转通过第三传动皮带带动第二螺杆反转,第二螺杆的反转使得第二螺杆在螺纹孔内向下移动,通过第二螺杆的向下移动使得配重块将底座进行支撑,当第二螺杆向下移动至合适位置时关闭第五伺服电机即可,最终完了对底座的支撑保护。
与现有技术相比,本发明的有益效果是:
1、本方案中,空心立柱是为了便于对液压缸进行保护的,液压缸是为了便于通过辅助滑动机构带动移动机构滑动的,辅助滑动机构是为了便于带动移动机构滑动的,移动机构是为了便于调节钩爪位置的,卷线机构是为了便于收放夹持机构的,夹持机构是为了便于对车间物品进行钩取的,升降机构是为了便于对第一支撑机构进行升降的,当移动机构随着辅助滑动机构升降时可以同步调节第一支撑机构升降,从而防止移动机构和第一支撑机构相撞,进而保护移动机构和第一支撑机构,第一支撑机构是为了便于支撑移动机构的,是为了便于在对物品进行钩取时提高起重机自身稳定性的,底部支撑机构是为了便于容纳角度调节机构的,角度调节机构是为了便于固定空心立柱和液压缸的,第二支撑机构是为了便于支撑底部支撑机构的,进而提高起重机在运行时的稳定性,防止在调节悬臂和钩爪时出现起重机重心不稳定的情况,提高了起重机的安全性。
2、本方案中,第一滑槽是为了便于T形滑块和T形滑板滑动的,弧形槽的开设是为了便于第一从动齿轮转动的,第一固定板是为了便于固定第三伺服电机的,液压缸是为了便于对辅助滑块进行升降的,辅助滑块是为了便于固定T形滑块和T形滑板的,T形滑块是为了辅助滑块滑动的,T形滑板是为了便于连接工字横梁的,保护壳是为了便于固定气缸的,第一安装孔是为了便于钩爪活动贯穿的,气缸是为了便于固定移动齿条的,移动齿条是为了便于和间歇齿轮相啮合的,间歇齿轮是为了便于通过移动齿条的移动带动钩爪移动的,钩爪是为了便于对物品进行钩取的,T形限位杆是为了便于套设第一连接件的,第一连接件是为了便于安装第二伺服电机的,第二固定板是为了便于转动连接第一转杆的,第一转杆是为了便于套设两个第二连接件的,第二连接件是为了便于转动连接第二转杆的,第二伺服电机是为了便于带动第一转杆转动的,L形固定架是为了便于进一步固定第二伺服电机的,第二转杆是为了便于套设钢绳的,第一皮带轮和第一传动皮带是为了便于通过第二伺服电机带动第二转杆转动的,钢绳是为了便于固定保护壳的,工字横梁是为了便于开设第二滑槽的,第二滑槽是为了便于第一限位滑块和第二限位滑块滑动的,第一安装槽的开设是为了便于安装固定齿条的,固定齿条是为了便于和移动齿轮相啮合,移动齿轮是为了便于固定第一伺服电机的,通过第一伺服电机和固定齿条相互配合使得移动齿轮移动,滑孔是为了便于T形限位杆滑动的,第一伺服电机是为了便于带动移动齿轮转动的,限位滑板是为了便于固定第一伺服电机的,第一限位滑块是为了对限位滑板进行限位的,第二限位滑块是为了便于固定第二固定板的。
3、本方案中,第一螺杆是为了便于螺纹连接螺母的,第三伺服电机是为了便于固定主动皮带轮的,主动皮带轮和从动皮带轮是为了便于和连接皮带相互配合的,连接皮带是为了便于将主动皮带轮和从动皮带轮传动连接的,弧形安装块是为了便于转动连接第一螺杆,螺母是为了便于转动连接安装套筒的,安装套筒是为便于套设于第一螺杆的,同时也是为了便于固定支撑架的,支撑架是为了便于支撑工字横梁的,第三固定板是为了便于固定U形固定架的,U形固定架是为了便有支撑第四伺服电机的,第四伺服电机是为了便于带动第一主动齿轮转动的,第一主动齿轮是为了便于和第一从动齿轮啮合的,第一从动齿轮是为了便于带动安装套筒转动的,进而带动支撑架转动,第三转杆是为了便于固定第三主动齿轮的,第五伺服电机是为了便于带动第二皮带轮转动的,第二皮带轮是为了便于通过第二传动皮带带动第三转杆转动的,第三主动齿轮是为了便于和第三从动齿轮相啮合的,第四转杆是为了便于固定第三皮带轮的,第三从动齿轮是为了便于带动第四转杆转动的,安装板是为了便于开凿螺纹孔的,螺纹孔是为了便于第二螺杆螺纹连接的,第二螺杆是为了便于固定限位块和配重块的,限位块是为了便于对第二螺杆限位的,配重块是为了便于支撑底座的,第三皮带轮是为了便于和第三传动皮带相互配合的,第三传动皮带是为了便于传动连接第三皮带轮的,最终可以实现当悬臂和钩爪调节角度时起重机不会发生重心不稳的情况,进而提高了起重机的安全性。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
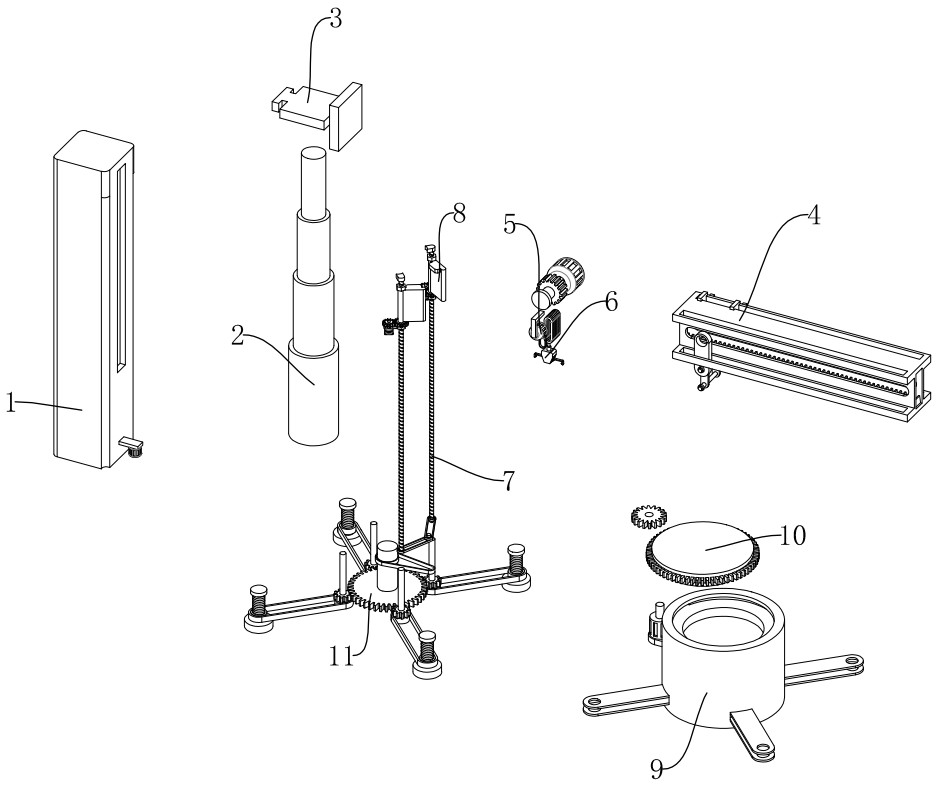
图1为本发明的爆炸图;
图2为本发明的整体立体图;
图3为本发明中空心立柱的结构图;
图4为本发明中辅助滑动机构的结构图;
图5为本发明中移动机构和卷线机构的正视结构图;
图6为本发明中移动机构和卷线机构的仰视结构图;
图7为本发明中夹持机构的立体图;
图8为本发明中夹持机构的内部结构图;
图9为本发明中升降机构的结构图;
图10为本发明中第一支撑机构的结构图;
图11为本发明的局部剖视图;
图12为本发明中底部支撑机构的结构图;
图13为本发明中角度调节机构的局部结构图;
图14为本发明中第二支撑机构的结构图。
图中:1、空心立柱;101、第一滑槽;102、弧形槽;103、第一固定板;2、液压缸;3、辅助滑动机构;301、辅助滑块;302、T形滑块;303、T形滑板;4、移动机构;401、工字横梁;402、第二滑槽;403、第一安装槽;404、固定齿条;405、移动齿轮;406、滑孔;407、第一伺服电机;408、限位滑板;409、第一限位滑块;410、第二限位滑块;5、卷线机构;501、T形限位杆;502、第一连接件;503、第二固定板;504、第一转杆;505、第二伺服电机;506、L形固定架;507、第二转杆;508、第一皮带轮;509、第一传动皮带;510、钢绳;511、第二连接件;6、夹持机构;601、保护壳;602、第一安装孔;603、气缸;604、移动齿条;605、间歇齿轮;606、钩爪;7、升降机构;701、第一螺杆;702、第三伺服电机;703、主动皮带轮;704、从动皮带轮;705、连接皮带;706、弧形安装块;707、螺母;8、第一支撑机构;801、安装套筒;802、支撑架;803、第一从动齿轮;804、第四伺服电机;805、第一主动齿轮;806、第三固定板;807、U形固定架;9、底部支撑机构;901、底座;902、第二安装槽;903、第二安装孔;904、限位环;905、第四固定板;906、第三安装孔;10、角度调节机构;1001、驱动电机;1002、第二主动齿轮;1003、第二从动齿轮;1004、T形圆柱;11、第二支撑机构;1101、第三转杆;1102、第五伺服电机;1103、第二皮带轮;1104、第二传动皮带;1105、第三主动齿轮;1106、第四转杆;1107、第三从动齿轮;1108、安装板;1109、螺纹孔;1110、第二螺杆;1111、限位块;1112、配重块;1113、第三皮带轮;1114、第三传动皮带。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例
请参阅图1-14,本实施例提供的技术方案如下:
一种车间起重用悬臂式起重机及其使用方法,包括:
空心立柱1;
液压缸2,液压缸2设置于空心立柱1内;
辅助滑动机构3,辅助滑动机构3设置于空心立柱1内,且辅助滑动机构3与液压缸2相连接,辅助滑动机构3通过液压缸2实现升降;
夹持机构6,夹持机构6设置于空心立柱1的右侧,夹持机构6用以实现对物品的夹持;
卷线机构5,卷线机构5设置于夹持机构6的上侧,卷线机构5与夹持机构6相连接,卷线机构5用以实现对夹持机构6的收放;
移动机构4,移动机构4设置于空心立柱1的右侧,移动机构4与卷线机构5相连接,移动机构4用以实现对卷线机构5的移动;
升降机构7,升降机构7设置于空心立柱1的右侧,升降机构7位于移动机构4的下侧;
第一支撑机构8,第一支撑机构8设置于空心立柱1的右侧,第一支撑机构8用以实现支撑移动机构4;
角度调节机构10,角度调节机构10设置于空心立柱1的下侧,角度调节机构10用以实现支撑空心立柱1和液压缸2;
底部支撑机构9,底部支撑机构9设置于空心立柱1的下侧,角度调节机构10位于底部支撑机构9内,底部支撑机构9用以实现容纳角度调节机构10;
第二支撑机构11,第二支撑机构11设置于角度调节机构10的下侧,第二支撑机构11用以实现支撑底部支撑机构9。
在本发明的具体实施例中,空心立柱1是为了便于对液压缸2进行保护的,液压缸2是为了便于通过辅助滑动机构3带动移动机构4滑动的,辅助滑动机构3是为了便于带动移动机构4滑动的,移动机构4是为了便于调节钩爪位置的,卷线机构5是为了便于收放夹持机构6的,夹持机构6是为了便于对车间物品进行钩取的,升降机构7是为了便于对第一支撑机构8进行升降的,当移动机构4随着辅助滑动机构3升降时可以同步调节第一支撑机构8升降,从而防止移动机构4和第一支撑机构8相撞,进而保护移动机构4和第一支撑机构8,第一支撑机构8是为了便于支撑移动机构4的,是为了便于在对物品进行钩取时提高起重机自身稳定性的,底部支撑机构9是为了便于容纳角度调节机构10的,角度调节机构10是为了便于固定空心立柱1和液压缸2的,第二支撑机构11是为了便于支撑底部支撑机构9的,进而提高起重机在运行时的稳定性,防止在调节悬臂和钩爪时出现起重机重心不稳定的情况,提高了起重机的安全性。
具体的,请参阅图1-4,空心立柱1包括第一滑槽101、弧形槽102和第一固定板103,第一滑槽101设置为两个,两个第一滑槽101分别开设于空心立柱1的左右两端,弧形槽102设置为两个,两个弧形槽102均开设于空心立柱1的下端,第一固定板103固定连接于空心立柱1的右端,液压缸2位于空心立柱1内,辅助滑动机构3包括辅助滑块301、T形滑块302和T形滑板303,辅助滑块301滑动连接于空心立柱1内,且辅助滑块301固定连接于液压缸2的伸长端,T形滑块302固定连接于辅助滑块301的左端,且T形滑块302滑动连接于位于左侧的第一滑槽101内,T形滑板303固定连接于辅助滑块301的右端,且T形滑板303滑动连接于位于右侧的第一滑槽101内。
在本发明的具体实施例中,第一滑槽101是为了便于T形滑块302和T形滑板303滑动的,弧形槽102的开设是为了便于第一从动齿轮803转动的,第一固定板103是为了便于固定第三伺服电机702的,液压缸2是为了便于对辅助滑块301进行升降的,辅助滑块301是为了便于固定T形滑块302和T形滑板303的,T形滑块302是为了辅助滑块301滑动的,T形滑板303是为了便于连接工字横梁401的。
具体的,请参阅图7-8,夹持机构6包括保护壳601、第一安装孔602、气缸603、移动齿条604、间歇齿轮605和钩爪606,保护壳601设置于空心立柱1的右侧,第一安装孔602开设于保护壳601内,气缸603固定连接于保护壳601的上内壁,移动齿条604固定连接于气缸603的伸长端,间歇齿轮605设置为两个,间歇齿轮605通过铰轴活动交接于保护壳601的前后内壁之间,钩爪606设置为两个,钩爪606固定连接于间歇齿轮605的表面,移动齿条604与间歇齿轮605相啮合。
在本发明的具体实施例中,保护壳601是为了便于固定气缸603的,第一安装孔602是为了便于钩爪606活动贯穿的,气缸603是为了便于固定移动齿条604的,移动齿条604是为了便于和间歇齿轮605相啮合的,间歇齿轮605是为了便于通过移动齿条604的移动带动钩爪606移动的,钩爪606是为了便于对物品进行钩取的。
具体的,请参阅图5-6,卷线机构5包括T形限位杆501、第一连接件502、第二固定板503、第一转杆504、第二伺服电机505、L形固定架506、第二转杆507、第一皮带轮508、第一传动皮带509、钢绳510和第二连接件511,T形限位杆501设置于空心立柱1的右侧,第一连接件502套设于T形限位杆501的表面,第二固定板503设置于空心立柱的右侧,第一转杆504转动连接于第一连接件502和第二固定板503之间,第二伺服电机505固定连接于第一连接件502的前端,第二伺服电机505的输出端活动贯穿第一连接件502的前端,且第二伺服电机505的输出端固定连接于第一转杆504的前端,L形固定架506固定连接于第二伺服电机505的前端,第二连接件511设置为两个,两个第二连接件511均套设于第一转杆504的表面,第二转杆507转动连接于两个第二连接件511之间,且第二转杆507的前端向外延伸,第一皮带轮508设置为两个,两个第一皮带轮508分别固定连接于第二转杆507和第二伺服电机505的输出端表面,第一传动皮带509套设于两个第一皮带轮508的表面,且两个第一皮带轮508通过第一传动皮带509传动连接,钢绳510固定连接于第一转杆504的表面,且钢绳510缠绕于第一转杆504和第二转杆507的表面,保护壳601固定连接于钢绳510的另一端。
在本发明的具体实施例中,T形限位杆501是为了便于套设第一连接件502的,第一连接件502是为了便于安装第二伺服电机505的,第二固定板503是为了便于转动连接第一转杆504的,第一转杆504是为了便于套设两个第二连接件511的,第二连接件511是为了便于转动连接第二转杆507的,第二伺服电机505是为了便于带动第一转杆504转动的,L形固定架506是为了便于进一步固定第二伺服电机505的,第二转杆507是为了便于套设钢绳510的,第一皮带轮508和第一传动皮带509是为了便于通过第二伺服电机505带动第二转杆507转动的,钢绳510是为了便于固定保护壳601的。
具体的,请参阅图5-6,移动机构4包括工字横梁401、第二滑槽402、第一安装槽403、固定齿条404、移动齿轮405、滑孔406、第一伺服电机407、限位滑板408、第一限位滑块409和第二限位滑块410,工字横梁401固定连接于T形滑板303的右端,第二滑槽402设置为四个,每两个所述第二滑槽402设置为一组,两组所述第二滑槽402分别开设于工字横梁401的上下两端,且两组第二滑槽402对称设置,第一安装槽403开设于工字横梁401的右端,固定齿条404固定连接于第一安装槽403的下内壁,移动齿轮405啮合连接于固定齿条404的上端,T形限位杆501固定连接于移动齿轮405的前端中心处,滑孔406设置为两个,两个所述滑孔406分别开设于工字横梁401的前后两端,且两个滑孔406均与第一安装槽403相连通,第一伺服电机407的输出端固定连接于移动齿轮405的后端中心处,第一伺服电机407的输出端于滑孔406相匹配,限位滑板408设置为两个,两个限位滑板408分别固定连接于第一伺服电机407的左右两端,第一限位滑块409设置为两个,第一限位滑块409固定连接于限位滑板408的上端,且第一限位滑块409滑动连接于位于上侧的第二滑槽402内,第二限位滑块410设置为两个,工字横梁401固定连接于限位滑板408的下端,且第二限位滑块410滑动连接于位于下侧的第二滑槽402内。
在本发明的具体实施例中,工字横梁401是为了便于开设第二滑槽402的,第二滑槽402是为了便于第一限位滑块409和第二限位滑块410滑动的,第一安装槽403的开设是为了便于安装固定齿条404的,固定齿条404是为了便于和移动齿轮405相啮合,移动齿轮405是为了便于固定第一伺服电机407的,通过第一伺服电机407和固定齿条404相互配合使得移动齿轮405移动,滑孔406是为了便于T形限位杆501滑动的,第一伺服电机407是为了便于带动移动齿轮405转动的,限位滑板408是为了便于固定第一伺服电机407的,第一限位滑块409是为了对限位滑板408进行限位的,第二限位滑块410是为了便于固定第二固定板503的。
具体的,请参阅图9,升降机构7包括第一螺杆701、第三伺服电机702、主动皮带轮703、从动皮带轮704、连接皮带705、弧形安装块706和螺母707,第一螺杆701、主动皮带轮703、从动皮带轮704、连接皮带705和弧形安装块706设置均两个,弧形安装块706固定连接于空心立柱1的表面,第一螺杆701转动连接于弧形安装块706的下端,第三伺服电机702设置于空心立柱1的右侧,主动皮带轮703固定连接于第三伺服电机702的输出端表面,从动皮带轮704固定连接于第一螺杆701的表面,连接皮带705套设于主动皮带轮703和从动皮带轮704的表面,且主动皮带轮703和从动皮带轮704通过连接皮带705传动连接,螺母707设置为四个,四个螺母707分别螺纹连接于两个第一螺杆701的表面。
在本发明的具体实施例中,第一螺杆701是为了便于螺纹连接螺母707的,第三伺服电机702是为了便于固定主动皮带轮703的,主动皮带轮703和从动皮带轮704是为了便于和连接皮带705相互配合的,连接皮带705是为了便于将主动皮带轮703和从动皮带轮704传动连接的,弧形安装块706是为了便于转动连接第一螺杆701,螺母707是为了便于转动连接安装套筒801的。
具体的,请参阅图9-10,第一支撑机构8包括安装套筒801、支撑架802、第一从动齿轮803、第四伺服电机804、第一主动齿轮805、第三固定板806和U形固定架807,安装套筒801、支撑架802、第一从动齿轮803、第四伺服电机804、第一主动齿轮805、第三固定板806和U形固定架807均设置为两个,安装套筒801转动连接于两个螺母707之间,且安装套筒801套设于第一螺杆701的表面,支撑架802固定连接于安装套筒801的表面,第一从动齿轮803固定连接于安装套筒801的表面,且安装套筒801位于支撑架802的下侧,第三固定板806固定连接于螺母707的表面,U形固定架807固定连接于第三固定板806的下端,第四伺服电机804固定连接于U形固定架807内,第四伺服电机804的输出端活动贯穿第三固定板806的下端,第一主动齿轮805固定连接于第三固定板806的输出端表面,且第一主动齿轮805与第一从动齿轮803相啮合。
在本发明的具体实施例中,安装套筒801是为便于套设于第一螺杆701的,同时也是为了便于固定支撑架802的,支撑架802是为了便于支撑工字横梁401的,第三固定板806是为了便于固定U形固定架807的,U形固定架807是为了便有支撑第四伺服电机804的,第四伺服电机804是为了便于带动第一主动齿轮805转动的,第一主动齿轮805是为了便于和第一从动齿轮803啮合的,第一从动齿轮803是为了便于带动安装套筒801转动的,进而带动支撑架802转动。
具体的,请参阅图11-13,角度调节机构10包括驱动电机1001、第二主动齿轮1002、第二从动齿轮1003和T形圆柱1004,驱动电机1001设置于空心立柱1的下侧,第二主动齿轮1002固定连接于驱动电机1001的输出端表面,第二从动齿轮1003与第二主动齿轮1002啮合连接,所述T形圆柱1004设置于第二从动齿轮1003内,所述第二从动齿轮1003固定连接于T形圆柱1004的表面,所述空心立柱1和液压缸2均固定连接于T形圆柱1004的上端,两个第一螺杆701均转动连接于第二从动齿轮1003的上端,底部支撑机构9包括底座901、第二安装槽902、第二安装孔903、限位环904、第四固定板905和第三安装孔906,底座901设置于空心立柱1的下侧,第二安装槽902开设于底座901内,第二安装孔903开设于第二安装槽902内,限位环904固定连接于底座901内,限位环904位于第二安装槽902的下侧,第四固定板905固定连接于空心立柱1的表面,且驱动电机1001固定连接于第四固定板905的上端,第三安装孔906设置为四个,四个第三安装孔906均开设于底座901内,T形圆柱1004滑动连接第二安装槽902内,且T形圆柱1004的下部凸起活动插接于限位环904内。
在本发明的具体实施例中,驱动电机1001是为了便于带动第二主动齿轮1002转动的,第二主动齿轮1002是为了便于带动第二从动齿轮1003转动的,第二从动齿轮1003是为了便于带动T形圆柱1004转动的,通过T形圆柱1004的转动带动空心立柱1和液压缸2转动,底座901是为了便于开设第二安装槽902的,第二安装槽902是为了便于容纳第二从动齿轮1003的,第二安装孔903是为了便于第二主动齿轮1002和第二从动齿轮1003啮合的,限位环904是为了便于支撑T形圆柱1004的,第四固定板905是为了便于支撑驱动电机1001的。
具体的,请参阅图12-14,第二支撑机构11包括第三转杆1101、第五伺服电机1102、第二皮带轮1103、第二传动皮带1104、第三主动齿轮1105、第四转杆1106、第三从动齿轮1107、安装板1108、螺纹孔1109、第二螺杆1110、限位块1111、配重块1112、第三皮带轮1113和第三传动皮带1114,第三转杆1101转动连接于底座901与第二从动齿轮1003之间,第五伺服电机1102固定连接于限位环904的下端,第二皮带轮1103设置为两个,两个第二皮带轮1103分别固定连接于第三转杆1101的表面和第五伺服电机1102的输出端表面,第二传动皮带1104套设于两个第二皮带轮1103的表面,且两个第二皮带轮1103通过第二传动皮带1104传动连接,第三主动齿轮1105固定连接于第三转杆1101的表面,且第三主动齿轮1105位于第二皮带轮1103的下侧,第四转杆1106、第三从动齿轮1107、第二螺杆1110、限位块1111、配重块1112和第三传动皮带1114均设置为四个,安装板1108、螺纹孔1109和第三皮带轮1113均设置为八个,第四转杆1106转动连接于底座901和限位环904之间,第三从动齿轮1107固定连接于第四转杆1106的表面,第三主动齿轮1105和第三从动齿轮1107相啮合,安装板1108固定连接于第三安装孔906的上下内壁,螺纹孔1109开凿于安装板1108的上端,第二螺杆1110螺纹连接于螺纹孔1109内,限位块1111和配重块1112分别固定连接于第二螺杆1110的上下两端,第三皮带轮1113分别固定连接于第四转杆1106和第二螺杆1110的表面,第三传动皮带1114套设于两个第三皮带轮1113的表面,且两个第三皮带轮1113通过第三传动皮带1114传动连接。
在本发明的具体实施例中,第三转杆1101是为了便于固定第三主动齿轮1105的,第五伺服电机1102是为了便于带动第二皮带轮1103转动的,第二皮带轮1103是为了便于通过第二传动皮带1104带动第三转杆1101转动的,第三主动齿轮1105是为了便于和第三从动齿轮1107相啮合的,第四转杆1106是为了便于固定第三皮带轮1113的,第三从动齿轮1107是为了便于带动第四转杆1106转动的,安装板1108是为了便于开凿螺纹孔1109的,螺纹孔1109是为了便于第二螺杆1110螺纹连接的,第二螺杆1110是为了便于固定限位块1111和配重块1112的,限位块1111是为了便于对第二螺杆1110限位的,配重块1112是为了便于支撑底座901的,第三皮带轮1113是为了便于和第三传动皮带1114相互配合的,第三传动皮带1114是为了便于传动连接第三皮带轮1113的。
一种车间起重用悬臂式起重机及其使用方法的使用方法,包括如下步骤:
S1、当需要对物品钩取时:
S11、调节钩爪位置:启动第一伺服电机407正转,第一伺服电机407的正转带动了移动齿轮405正转,由于固定齿条404与移动齿轮405相啮合,所以移动齿轮405正转使得移动齿轮405向右移动,移动齿轮405的向右移动使得T形限位杆501在滑孔406内滑动,移动齿轮405的向右移动带动了限位滑板408向右滑动,限位滑板408的向右移动使得第二固定板503向右移动,钩爪移动至合适位置时关闭第一伺服电机407,从而完成对钩爪位置的调整,以便于对物品的钩取;
S12、放线:当钩爪调整好位置之后,启动第二伺服电机505反转,第二伺服电机505的反转使得第二伺服电机505的输出端反转,第二伺服电机505的输出端反转使得第一转杆504和第二转杆507同时反转,第一转杆504和第二转杆507的反转使得钢绳510向下移动,钢绳510的向下移动使得钩爪向下移动,当钩爪向下移动至待钩取物品时关闭第二伺服电机505;
S13、钩取物品:启动气缸603收缩,气缸603的收缩使得移动齿条604向上移动,由于移动齿条604和两个间歇齿轮605啮合,所以移动齿条604向上移动使得两个间歇齿轮605表面带动钩爪606向相靠近的一端移动,当两个钩爪606将物品钩取稳定后关闭气缸603集合,最终完成了对物品的钩取,然后反向操作上述步骤即可完成对物品的移动;
S2、当需要对悬臂进行角度调解时:启动驱动电机1001转动,驱动电机1001的转动带了第二主动齿轮1002转动,第二主动齿轮1002的转动使得第二从动齿轮1003转动,第二从动齿轮1003的转动,通过第二从动齿轮1003的转动带动空心立柱1和液压缸2转动,进而使得悬臂转动;
S3、第一支撑保护:
S31、支撑架高度调节:启动第三伺服电机702正转,第三伺服电机702的正转使得主动皮带轮703正转,主动皮带轮703的正转通过连接皮带705带动了从动皮带轮704正转,从动皮带轮704的正转使得第一螺杆701正转,第一螺杆701的正转使得螺母707在第一螺杆701的表面向上移动;
S32、直接角度调节:启动第四伺服电机804反转,第四伺服电机804的反转带动第一主动齿轮805反转,第一主动齿轮805的反转使得第一从动齿轮803正转,第一从动齿轮803的正转使得安装套筒801向相对的一侧移动,当支撑架802位于工字横梁401的下侧时关闭第四伺服电机804,最终完成了对工字横梁401的支撑保护;
S4、第二支撑保护:启动第五伺服电机1102正转,第五伺服电机1102的正转使得第二皮带轮1103正转,第二皮带轮1103的正转通过第二传动皮带1104带动第三转杆1101正转,第三转杆1101的正转带动了第三主动齿轮1105正转,由于第三主动齿轮1105与第三从动齿轮1107相啮合所以第三主动齿轮1105的正转带动了第三从动齿轮1107反转,第三从动齿轮1107的反转使得第四转杆1106反转,第四转杆1106的反转使得第三皮带轮1113反转,第三皮带轮1113的反转通过第三传动皮带1114带动第二螺杆1110反转,第二螺杆1110的反转使得第二螺杆1110在螺纹孔1109内向下移动,通过第二螺杆1110的向下移动使得配重块1112将底座901进行支撑,当第二螺杆1110向下移动至合适位置时关闭第五伺服电机1102即可,最终完了对底座901的支撑保护。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种车间起重用悬臂式起重机及其使用方法
- 一种悬臂式起重机及其使用方法