一种自动蔬菜挖掘装置
文献发布时间:2023-06-19 09:57:26
技术领域
本发明属于蔬菜挖掘设备技术领域,具体涉及一种自动蔬菜挖掘装置。
背景技术
随着社会的日益发展,传统的农业种植蔬菜和挖掘从业人员减少,用人的人工成本增加。针对这一现象,随之出现的是农业自动化,这在很大程度上减轻了种植人工方面的成本压力,但这种自动化系统仍然存在着不少的弊端。如占基地要有一定的规模、投入成本高,只适合规模化投入的项目,并不能解决个体农户投入的需求。
现有个体农户所采用的蔬菜挖掘装置,大多都是只能车体沿着地面行走移动,挖掘机构相对车体是固定的,这样的方式在使用的时候,不能调节挖掘机构伸入地下的距离以适应不同蔬菜挖掘的需求,使用受到了局限,适应性不强。
发明内容
本发明旨在解决现有技术的缺陷,提供一种自动蔬菜挖掘装置。
本发明的技术方案如下:
一种自动蔬菜挖掘装置,包括底盘行走机构、支撑机构和挖掘机构,所述的底盘行走机构上设置支撑立柱,挖掘机构安装在支撑机构上,支撑机构安装在支撑立柱上,底盘行走机构可带动支撑机构相对于地面移动,挖掘机构除了可以随着支撑机构移动,还可以相对于支撑机构水平移动;所述的支撑机构包括横梁和竖直移动柱,竖直移动柱垂直安装在横梁的两端且分别与支撑活动连接,竖直移动柱可相对于支撑立柱上下移动;所述挖掘机构包括钻头和挖掘刀,所述钻头安装在转轴下端,转轴顶端位于横梁上方且与旋转电机连接,旋转电机安装在支撑壳体上,钻头的转轴外套设有支撑轴,支撑轴外设有与横梁活动连接的套筒,支撑壳体与套筒外壁固定连接,套筒在水平驱动机构的作用下带动挖掘机构和支撑壳体沿横梁移动,所述挖掘刀设置在钻头上方,挖掘刀的上端与开合机构连接,支撑轴的顶端设置能使支撑轴相对于套筒升降的升降机构,支撑轴的长度大于套筒的长度使支撑轴有升降的空间,开合机构分别与支撑轴和套筒的下端连接,支撑轴做升降运动带动开合机构相对于支撑轴张开或收缩,开合机构收缩时带动挖掘刀伸入蔬菜根部,开合机构张开时带动挖掘刀向上挑起蔬菜,从而实现挖掘效果。
所述的开合机构包括长支杆和短支杆,长支杆和短支杆的下端均与挖掘刀的顶端铰接,长支杆的顶端与套筒的下端铰接,短支杆的顶端与支撑轴的下端铰接。
所述水平驱动机构包括第一转轮,第一转轮上设置轮齿,横梁上沿长度方向设置第一齿条,转轮与第一齿条啮合,转轮的中心与水平驱动电机的输出轴连接,水平驱动电机安装在支撑壳体的下部,水平驱动电机的输出轴与套筒活动接触。
所述的升降机构包括中空的固定块和第二转轮,固定块与支撑轴的上端外壁固定连接,固定块的对称内壁上设置第二齿条,第二转轮设置于固定块内,第二转轮沿周向的一半设置轮齿,第二转轮转动过程中依次与固定块两侧上的第二齿条啮合,第二转轮的中心与升降电机的输出轴连接,升降电机安装于支撑壳体上。
所述的底盘行走机构包括履带式行走机构和支撑底盘,支撑底盘安装在履带式行走机构上方,支撑立柱竖直安装在支撑底盘上方,底盘行走机构对称设置于支撑机构两端与支撑机构形成H型结构。
所述支撑立柱朝向横梁的一侧设置竖向的第三齿条,竖直移动柱上设置与第三齿条啮合的第三转轮,第三转轮在主升降电机的作用下正反转动带动支撑机构相对于支撑立柱升降。
所述转轴的下端位于钻头上方设置限位器,限位器大于支撑轴的外径。
本发明的有益效果如下:
1.本发明所述的挖掘装置,通过设置履带行走机构、可以升降的支撑机构和可以沿着支撑机构水平移动的挖掘机构,可以使挖掘机构同时实现多个方向的位置调整,从而确保挖掘机构对准不同位置的蔬菜进行精确挖掘,提高蔬菜挖掘的效率,并且操作更灵活,功能更齐全。
2.本发明所述的挖掘机构,设置钻头和挖掘刀相结合的方式,且挖掘刀设置在钻头的上方可相对于钻头上下运行,进行挖掘动作时,钻头先伸入地下可以为挖掘刀开出挖掘通道,然后再利用升降机构带动挖掘刀的开合机构动作实现对蔬菜根部的挖掘,设置的设置方式,不仅可以对挖掘刀进行保护,而且钻头预先开出挖掘通道还能减小挖掘刀动作所需要的驱动力,从而减小横梁和挖掘刀受到机械撞击的应力。
附图说明
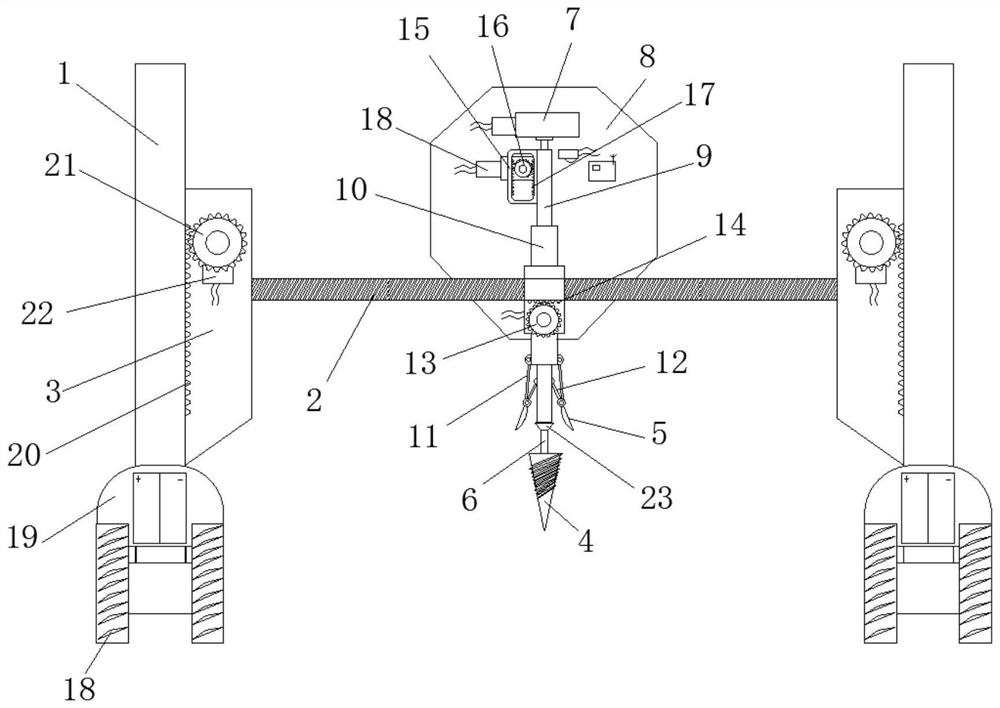
图1为本发明所述挖掘装置的结构示意图;
图2为本发明所述挖掘机构的机构示意图;
图3为本发明所述履带式行走机构的结构示意图;
图中各序号及其对应的名称如下:
1-支撑立柱,2-横梁,3-竖直移动柱,4-钻头,5-挖掘刀,6-转轴,7-旋转电机,8-支撑壳体,9-支撑轴,10-套筒,11-长支杆,12-短支杆,13-第一转轮,14-第一齿条,15-固定块,16-第二转轮,17-第二齿条,18-履带式行走机构,19-支撑底盘,20-第三齿条,21-第三转轮,22-主升降电机,23-限位器。
具体实施方式
下面结合附图对本发明作进一步说明。
如图1-3所示的一种自动蔬菜挖掘装置,包括底盘行走机构、支撑机构和挖掘机构,所述的底盘行走机构上设置支撑立柱1,挖掘机构安装在支撑机构上,支撑机构安装在支撑立柱上,底盘行走机构可带动支撑机构相对于地面移动,挖掘机构除了可以随着支撑机构移动,还可以相对于支撑机构水平移动;所述的支撑机构包括横梁2和竖直移动柱3,竖直移动柱垂直安装在横梁的两端且分别与支撑活动连接,竖直移动柱可相对于支撑立柱上下移动;所述挖掘机构包括钻头4和挖掘刀5,所述钻头安装在转轴6下端,转轴顶端位于横梁上方且与旋转电机7连接,旋转电机安装在支撑壳体8上,钻头的转轴6外套设有支撑轴9,支撑轴外设有与横梁活动连接的套筒10,支撑壳体与套筒外壁固定连接,套筒在水平驱动机构的作用下带动挖掘机构和支撑壳体沿横梁移动,所述挖掘刀5设置在钻头上方,挖掘刀的上端与开合机构连接,支撑轴的顶端设置能使支撑轴相对于套筒升降的升降机构,支撑轴的长度大于套筒的长度使支撑轴有升降的空间,开合机构分别与支撑轴和套筒的下端连接,支撑轴做升降运动带动开合机构相对于支撑轴张开或收缩,开合机构收缩时带动挖掘刀伸入蔬菜根部,开合机构张开时带动挖掘刀向上挑起蔬菜,从而实现挖掘效果。
所述的开合机构包括长支杆11和短支杆12,长支杆和短支杆的下端均与挖掘刀5的顶端铰接,长支杆的顶端与套筒10的下端铰接,短支杆的顶端与支撑轴9的下端铰接。
所述水平驱动机构包括第一转轮13,第一转轮上设置轮齿,横梁上沿长度方向设置第一齿条14,转轮与第一齿条啮合,转轮的中心与水平驱动电机的输出轴连接,水平驱动电机安装在支撑壳体8的下部,水平驱动电机的输出轴与套筒活动接触。
所述的升降机构包括中空的固定块15和第二转轮16,固定块与支撑轴的上端外壁固定连接,固定块的对称内壁上设置第二齿条17,第二转轮设置于固定块内,第二转轮沿周向的一半设置轮齿,第二转轮转动过程中依次与固定块两侧上的第二齿条啮合,第二转轮的中心与升降电机18的输出轴连接,升降电机安装于支撑壳体8上。
所述的底盘行走机构包括履带式行走机构18和支撑底盘19,支撑底盘安装在履带式行走机构上方,支撑立柱竖直安装在支撑底盘上方,底盘行走机构对称设置于支撑机构两端与支撑机构形成H型结构。
所述支撑立柱1朝向横梁的一侧设置竖向的第三齿条20,竖直移动柱3上设置与第三齿条啮合的第三转轮21,第三转轮在主升降电机22的作用下正反转动带动支撑机构相对于支撑立柱升降。
所述转轴6的下端位于钻头上方设置限位器23,限位器大于支撑轴9的外径。
本发明所述的挖掘装置,在使用时,履带行走机构带动支撑机构和挖掘机构在地面上移动,竖直移动柱在支撑立柱上升降,可以调整钻头和挖掘刀伸入地下的距离,以适应不同蔬菜挖掘的需求,挖掘机构可以沿着横梁左右移动,在行走机构移动路线不变的情况下使钻头和挖掘刀能调整到对准蔬菜的位置进行挖掘,挖掘效率更高,调整更灵活多变。
具体的,第三转轮在主升降电机正转的时候与第三齿条啮合传动带动竖直移动柱相对于支撑立柱向上运行,带动在横梁上的挖掘机构向上运行,此过程,钻头和挖掘刀伸入地下的距离变小,挖掘结束后,竖直移动柱可以上升到钻头离开地面,避免行走机构移动的时候受到阻力;当第三转轮在主升降电机反转时带动竖直移动柱相对于支撑立柱向下运行使钻头和挖掘刀伸入地下的距离变大,适应需要深挖的蔬菜;此外,待竖直移动柱上下移动到合适挖掘的高度位置后,在蔬菜挖掘过程中,还可以使主升降电机按规定的频率正反转,使钻头和挖掘刀有规律地向下钻入泥土中进行挖掘。
第一转轮13在水平驱动电机的作用下与第一齿条啮合传动带动挖掘机构和支撑壳体在横梁上左右移动,使钻头和挖掘到对准蔬菜所在的行或列进行挖掘,挖掘更准确,效率更高。
在进行蔬菜挖掘过程中,旋转电机7带动转轴旋转,使钻头顺利钻入地下,钻头钻入地下后给挖掘刀提供支撑,同时升降电机进行单向转动,初始位置时第二转轮16上的轮齿与固定块右侧的第二齿条啮合,升降电机转动的时候,第二转轮16逆时针旋转先带动支撑轴向上运动,此时挖掘刀开合机构向转轴中心收缩,第二转轮继续逆时针转动直至轮齿与固定块左侧的第二齿条啮合传动,此时与固定块连接的支撑轴向下运行,挖掘刀的开合机构向外以弧形轨迹张开,使挖局大向上挑起蔬菜根部,完成一个周期的挖掘动作;升降电机继续转动,第二转轮上的轮齿又与固定块右侧的第二齿条啮合,进行下一个周期的挖掘动作,如此循环往复进行蔬菜的挖掘。
所述的升降电机、主升降电机、旋转电机、水平驱动电机和履带行走及购均与主控板电连接,由主控板控制启动和关闭,实现自动控制的功能。
本发明所述的挖掘装置,通过设置履带行走机构、可以升降的支撑机构和可以沿着支撑机构水平移动的挖掘机构,可以使挖掘机构同时实现多个方向的位置调整,从而确保挖掘机构对准不同位置的蔬菜进行精确挖掘,提高蔬菜挖掘的效率,并且操作更灵活,功能更齐全。
本发明所述的挖掘机构,设置钻头和挖掘刀相结合的方式,且挖掘刀设置在钻头的上方可相对于钻头上下运行,进行挖掘动作时,钻头先伸入地下可以为挖掘刀开出挖掘通道,然后再利用升降机构带动挖掘刀的开合机构动作实现对蔬菜根部的挖掘,设置的设置方式,不仅可以对挖掘刀进行保护,而且钻头预先开出挖掘通道还能减小挖掘刀动作所需要的驱动力,从而减小横梁和挖掘刀受到机械撞击的应力。
- 一种自动蔬菜挖掘装置
- 一种蔬菜种植土壤挖掘装置