一种基于无人机影像进行地块自动勾画的方法
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及测绘技术领域,尤其涉及一种基于无人机影像进行地块自动勾画的方法。
背景技术
现有的地块标记方法多采用人工标记的方式,即标记时的地块标记数据需要人工测量采集,然后将采集到的数据进行汇总,最终上传至系统中进行显示。这些人工采集到的标记数据通常是现场勘测得到的地块面积,过程较为繁琐,且十分浪费时间和资源,并且采集的效率还很低。
发明内容
本发明的目的在于提供一种基于无人机影像进行地块自动勾画的方法,提高对地块数据的采集效率。
为实现上述目的,本发明提供了一种基于无人机影像进行地块自动勾画的方法,包括以下步骤:
基于设定的测绘路径,利用无人机获取所述测绘路径下的所有的地形数据,其中,所述地形数据包括图像数据集和对应的点云数据集;
基于设定的拼接点,对所述图像数据集中的所有图像数据进行拼接,并对拼接后得到的影像数据进行校正;
利用插值法对所述点云数据集生成高斯模型,并对所述高斯模型的高斯曲面进行拟合后进行聚类,得到对应的高度数据;
将校正后所述影像数据和所述点云数据集进行映射,并以点云渲染的方式,结合所述高度数据生成三维点云模型,以及根据地形边界线勾画出对应的地块。
其中,基于设定的拼接点,对所述图像数据集中的所有图像数据进行拼接,并对拼接后得到的影像数据进行校正,包括:
将所述图像数据集中的所有图像数据按照获取时间的先后顺序进行排序;
对所有的所述图像数据进行特征提取,并输入卷积神经中进行训练,得到多个相邻时间点的多张所述图像数据之间的重合特征;
将所述重合特征作为拼接点,对所述图像数据集中的所有图像数据进行拼接,并对拼接后得到的影像数据进行校正。
其中,将所述重合特征作为拼接点,对所述图像数据集中的所有图像数据进行拼接,并对拼接后得到的影像数据进行校正,包括:
按照所述获取时间的先后顺序,将多个所述拼接点进行排序;
基于每一个所述获取时间对应的多张所述图像数据,根据所述拼接点进行拼接,得到单点拼接图像。
其中,基于每一个所述获取时间对应的多张所述图像数据,根据所述拼接点进行拼接,得到单点拼接图像之后,所述方法还包括:
根据所有的所述拼接点的排序,将所有的所述单点拼接图像进行拼接,得到对应的影像数据,以及对所述影像数据进行校正。
其中,利用插值法对所述点云数据集生成高斯模型,并对所述高斯模型的高斯曲面进行拟合后进行聚类,得到对应的高度数据,包括:
对所述点云数据集进行划分,利用插值法和形态学开运算进行计算后,并利用高斯滤波进行平滑处理后,得到高斯模型;
通过设定窗口识别所述高斯模型的局部阈值点,并利用最速下降法对所述高斯模型的参数进行计算,得到对应的高度数据。
其中,将校正后所述影像数据和所述点云数据集进行映射,并以点云渲染的方式,结合所述高度数据生成三维点云模型,以及根据地形边界线勾画出对应的地块,包括:
根据所述获取时间,将校正后的所述影像数据与所述点云数据集相互配准映射;
以点云渲染的方式,并结合所述高度数据,将得到的点云影像数据转换成三维点云模型,并根据地形边界线勾画出对应的地块。
本发明的一种基于无人机影像进行地块自动勾画的方法,基于设定的测绘路径,利用无人机获取所述测绘路径下的所有的地形数据,其中,所述地形数据包括图像数据集和对应的点云数据集;基于设定的拼接点,对所述图像数据集中的所有图像数据进行拼接,并对拼接后得到的影像数据进行校正;利用插值法对所述点云数据集生成高斯模型,并对所述高斯模型的高斯曲面进行拟合后进行聚类,得到对应的高度数据;将校正后所述影像数据和所述点云数据集进行映射,并以点云渲染的方式,结合所述高度数据生成三维点云模型,以及根据地形边界线勾画出对应的地块。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明第一实施例提供的一种基于无人机影像进行地块自动勾画的方法的步骤示意图。
图2是本发明第二实施例提供的一种基于无人机影像进行地块自动勾画的方法的步骤示意图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1,本发明第一实施例提供一种基于无人机影像进行地块自动勾画的方法,包括以下步骤:
S101、基于设定的测绘路径,利用无人机获取所述测绘路径下的所有的地形数据,其中,所述地形数据包括图像数据集和对应的点云数据集。
具体的,当得到设定的测绘路径后,控制无人机按照所述测绘路径进行测量和数据采集,所述无人机包括固定翼无人机、无人直升机和多旋翼无人机,而所述无人机上会搭载激光扫描设备和摄像机,其中,所述激光扫描设备和所述摄像机在进行数据采集前,需要进行时钟同步,使两者在相同时间下,同步进行数据采集过程,这样就能保证在无人机的同一个位置下,进行相同角度、相同高度和相同时间以及相同的环境下进行数据的采集,可以有效的减少外部环境造成的初始数据的测量误差,能够减少后期的地块划分的误差,而得到的地形数据包括多个图像数据和点云数据,分别将所述图像数据和所述点云数据进行汇总归纳,得到对应的图像数据集和所述点云数据集;当所述无人机上的所述摄像机和所述激光扫描设备采集到数据后,利用无线网络,将采集到的数据实时传输至本地计算机或者数据处理设备中,而所述摄像机在采集时,可以拍摄多张照片,也可以采用多个摄像机在不同角度下进行图像数据的采集,这样可以增加数据的丰富性,也可以避免因为数据采集的数量较少,导致无法进行地块区分,然后再次进行数据采集过程,造成时间和资源的浪费,也可提高效率。
S102、基于设定的拼接点,对所述图像数据集中的所有图像数据进行拼接,并对拼接后得到的影像数据进行校正。
具体的,当本地数据处理设备接收到所述图像数据集后,将所述图像数据集中的所有图像数据按照获取时间的先后顺序进行排序,这样可以对每一组数据进行区分和排列,并且减少数据的分类时间,也便于与所述测绘路径进行重合验证;然后对所有的所述图像数据进行特征提取,其中,所述特征提取的详细方法为:将排序后的每组所述图像数据进行滤波去噪,然后在每组所述图像数据的内部中进行特征提取,得到初始特征,然后将所有的初始特征按照时间顺序输入卷积神经中进行训练,得到多个相邻时间点的多张所述图像数据之间的重合特征;其中,所述重合特征为相邻两个初始特征之间的衔接点或者重合点,将所述重合特征作为拼接点,按照所述获取时间的先后顺序,将多个所述拼接点进行排序,对所述图像数据集中的所有图像数据进行拼接,首先,按照所述初始特征,对每组包含的所有所述图像数据进行拼接,得到单点拼接图像;然后根据所有的所述拼接点的排序,将所有的所述单点拼接图像进行拼接,得到对应的影像数据,即能够得到按照所述测绘路径下的图像信息,进而可以得到一组完整的影像数据。还可以将拼接的顺序倒换过来,即先按照所述测绘路径,先按照拼接点的顺序,将多组所述图像数据依次根据对应的拼接点进行拼接,然后再按照所述初始特征,对每组所述图像数据进行拼接,同样也能得到一组完整的影像数据。
然后对所述影像数据进行校正,由于在拍摄所述图像数据时,会存在车辆、行人、路灯等干扰数据,因此需要将所述图像数据中的所有的干扰数据进行清理,同时对应清理所述点云数据集中对应的点云数据。并且还要对形成的所述影像数据进行检查,判断是否有盲区,即没有扫描到或者拍摄到的地方,对于盲区这种不可避免的偏差,则需要进行第二次的数据采集,然后对盲区进行数据填补,使测绘的数据尽量完善,影响结果。
S103、利用插值法对所述点云数据集生成高斯模型,并对所述高斯模型的高斯曲面进行拟合后进行聚类,得到对应的高度数据。
具体的,首先对所述点云数据集进行划分,分为非地面点和地面点,分别进行插值运算,得到数字地面模型(DSM)和数字高程模型(DEM),两者作差值运算求得CHM;由于原始的CHM中存在黑色或灰色的“孔”洞,进而影响采集对象顶点的探测。对CHM模型表面进行形态学“开”运算,将CHM模型中的“孔”洞替换为指定范围或者邻域内点云高度最大值点(高度阈值),形成CMM模型;运用高斯滤波方法对CMM模型进行线性平滑处理得到高斯模型。
然后,利用局部最大值法和最速下降法对高斯曲面进行拟合,得到对应的采集对象的位置及初步地块范围,固定窗口能准确地识别采集对象顶点,通过实验分析选用大小5×5的设定窗口可以找到高斯模型局部最大值点,使用高斯模型可消除伪局部最大值,减少采集对象识别中错误检测;然后利用最速下降法对高斯模型的参数进行计算。基于混合高斯模型的最小二维欧式距离聚类是将高程归一化点云进行距离迭代判断,划分临近点云归属情况,实现三维物体的准确分割。
S104、将校正后所述影像数据和所述点云数据集进行映射,并以点云渲染的方式,结合所述高度数据生成三维点云模型,以及根据地形边界线勾画出对应的地块。
具体的,根据所述获取时间,将校正后的所述影像数据与所述点云数据集相互配准映射;即根据所述获取时间,将相同时间下的所述影像数据和所述点云数据集中对应时刻下的点云数据进行配准映射,建立时间联系,得到影像点云数据,然后以点云渲染的方式,进行地物要素判读并采集得到点状、线状以及面状的地物要素,以全景影像的方式进行地物要素判读并采集得到全景影像上的地形图,利用三维点云模型中的点状、线状以及面状的地物要素勾画出建筑物水平截面的轮廓线;结合所述高度数据而将轮廓线拉伸从而构成建筑物模型;对影像数据进行纹理提取形成纹理贴图数据,利用纹理贴图数据对所建立的建筑物模型进行对应的纹理贴图处理,在三维模型中显示与其对应的贴图纹理,从而形成了三维模型,最后根据地形边界线即所述轮廓线勾画出对应的地块,并导入BIM软件系统中进行展示,同时还能根据获取的用户的输入数据,进行对应的地块展示,然后将得到的三维模型和勾画出的对应的地块进行保存,便于后续的查找与显示更新。直接利用了无人机获得的地形数据,节省了人工描绘、修补和地形参数的测量获取等操作,建模效率高,为建筑师了解和调查地块现状的有力保障。
请参阅图2,本发明第二实施例提供一种基于无人机影像进行地块自动勾画的方法,包括以下步骤:
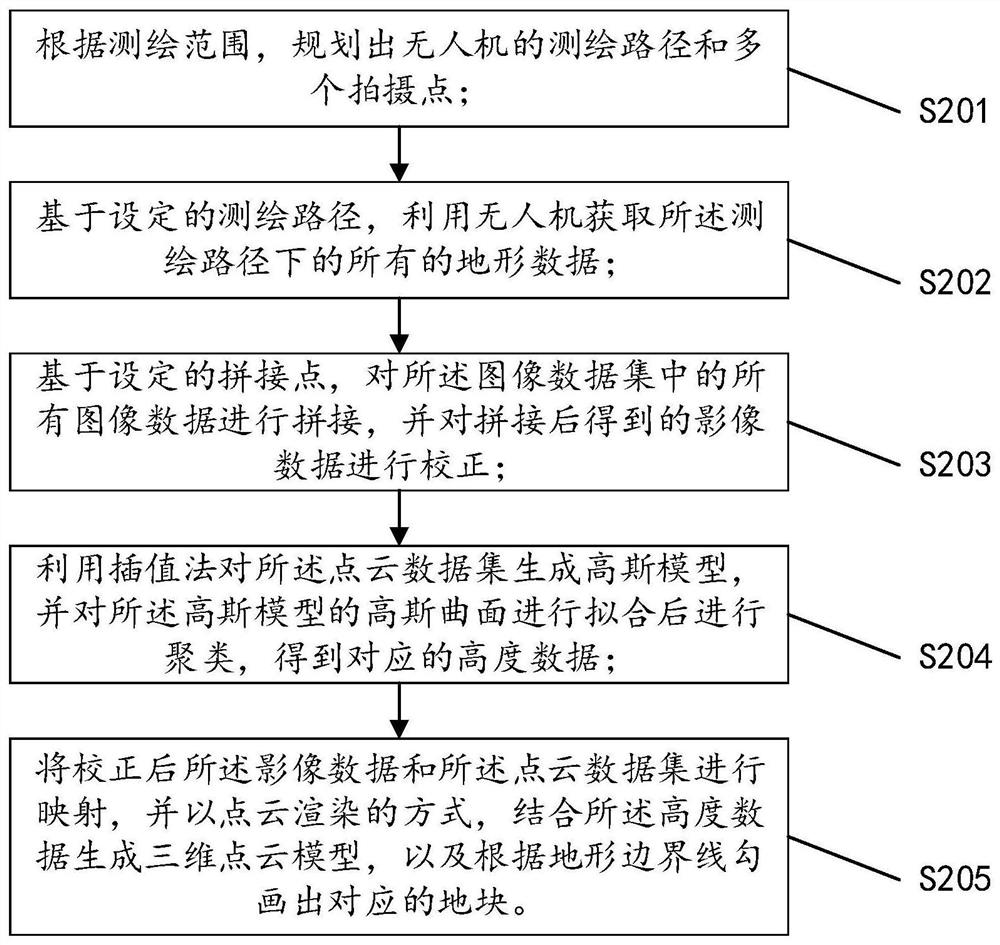
S201、根据测绘范围,规划出无人机的测绘路径和多个拍摄点。
具体的,首先根据具体的测绘要求,确定对应的需要进行测绘的范围,然后根据测绘范围,规划出无人机的测绘路径,所述测绘路径最好是不重复,不交差,且能将测绘范围进行全部覆盖,并在所述测绘路径上设定多个拍摄点,所有的所述拍摄点覆盖的范围汇集起来,就是整个所述测绘范围,并且对所述拍摄点进行点位和标号,便于后期手机采集数据时,进行排序和分类。并且所述无人机上带有定位系统,便于实时掌握无人机的位置。
S202-S205的具体实时方式中描述的内容与本发明第一实施例中的S101-S104的具体实施方式中所描述的内容相同,此处不在赘述。
本发明的一种基于无人机影像进行地块自动勾画的方法,基于设定的测绘路径,利用无人机获取所述测绘路径下的所有的地形数据,其中,所述地形数据包括图像数据集和对应的点云数据集;基于设定的拼接点,对所述图像数据集中的所有图像数据进行拼接,并对拼接后得到的影像数据进行校正;利用插值法对所述点云数据集生成高斯模型,并对所述高斯模型的高斯曲面进行拟合后进行聚类,得到对应的高度数据;将校正后所述影像数据和所述点云数据集进行映射,并以点云渲染的方式,结合所述高度数据生成三维点云模型,以及根据地形边界线勾画出对应的地块。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种基于无人机影像进行地块自动勾画的方法
- 一种MRI头部影像的脑功能区自动勾画方法、勾画系统、计算设备和存储介质