一种水下机器人
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及水质监测领域,特别涉及一种水下机器人。
背景技术
当前的水质监测都是通过传感器来测量,传感器都是通过人为放置在测量区域,操作繁琐,且受制于水域环境,一些地方并不适合人工放置,安全性也比较低。
发明内容
针对现有技术的不足,本发明旨在提供一种水下机器人,通过机器人的行走,替代人工操作,方便、安全。
一种水下机器人,包括行走架、水质监测传感器,所述行走架包括架体、设置在所述架体上的转动盘、设置在所述转动盘上的水平移动结构、设置在所述水平移动结构上的竖向移动机构,所述水质监测传感器安装在所述竖向移动机构上;
所述水平移动结构包括设置在所述转动盘上的水平滑轨、设置在所述水平滑轨上的水平滑块、和所述水平滑块连接的水平驱动气缸;
所述竖向移动机构包括设置在所述水平滑块上的竖向滑轨、设置在所述竖向滑轨上的竖向滑块、和所述竖向滑块连接的竖直驱动气缸。
本技术方案中,通过行走架上转动盘、水平移动结构以及竖向移动机构的动作,能够将水质监测传感器送至检测的水域,替代了人工操作,方便、安全。
优选的,所述架体上设置有多个行走机构;所述行走机构包括行走轮、用于安装所述行走轮的竖连接轴、设置在所述架体上的用于安装所述竖连接轴的安装套,所述竖连接轴滑动设置在安装套中。
一般而言,竖连接轴的直径与安装套的直径相同,当泥沙进入到安装套中,会影响竖连接轴在滑动,故优选的,所述安装套包括套体,套体包括竖槽,所述竖槽中设置有和所述竖连接轴连接的缓冲弹簧,所述竖槽的两侧设置有和所述竖槽连接的横槽,所述横槽中设置有调节弹簧,所述竖连接轴的两侧设置有限位在所述横槽的限位块。此设置,竖连接轴与竖槽之间的间距可以做大,降低泥沙对竖连接轴滑动时的影响,并且,竖连接轴在两侧调节弹簧的作用下,能够自适应地调整位置,这样就能使行走机构适应水下复杂的地形。
优选的,所述套体上设置有和所述横槽连通的排杂口。防止横槽中泥沙堆积而影响到调节弹簧的伸缩。
优选的,所述水平滑块上设置有用于对水平滑轨进行清扫的清理刷。
优选的,水质监测传感器包括球形阻挡网一、设置在所述球形阻挡网一中的安装盒体,所述安装盒体上设置有传感器本体,所述安装盒体的中间部位处设有和所述球形阻挡网一相固定连接并伸出到所述球形阻挡网一之外的转轴一,所述转轴一通过轴承安装在安装盒体上。
本技术方案中,球形阻挡网一起到隔离传感器本体的作用,降低水中物体对传感器本体的损害,提升了整个水质监测传感器的使用寿命,并且通过转轴一的转动带动球形阻挡网一转动,转动状态下的球形阻挡网一不易残留甚至残绕水草、腐败枝叶,检测精度更好。
优选的,还包括设置在所述球形阻挡网一内部的球形切割网,所述安装盒体位于所述球形切割网内部,且安装盒体的中间部位处还设有和所述球形切割网相固定连接的并伸出到所述球形阻挡网一之外的转轴二,所述转轴二与所述转轴一位于所述安装盒体的两侧,所述球形阻挡网一上设置有供所述转轴二穿过的穿过孔一,所述球形切割网上设置有供所述转轴一穿过的穿过孔二。当水体中的水草、腐败枝叶等易缠绕的物体缠绕在球形阻挡网一并且这些缠绕物体在流动水体的作用下进入到球形阻挡网一内部时,转轴二带动球形切割网转动,将进入到球形阻挡网一中的物体切断、切碎,防止缠绕物体的堆积,防止堵塞球形阻挡网一上的网孔,进而防止影响到球形阻挡网一内部的水质,进一步提升传感器的测量准确性;该结构,转轴一以及转轴二共同承担水体对安装盒体的冲击力,转轴一以及转轴二不易变形,整个水质监测传感器的结构强度好,稳定性好,水体流速的上限适用值更大。
优选的,还包括设置在所述球形切割网内部的球形阻挡网二,所述安装盒体位于所述球形阻挡网二内部,且球形阻挡网二和所述转轴二固定连接,所述球形阻挡网二上设置有供所述转轴一穿过的穿过孔三。球形阻挡网二的设置,进一步起到隔离传感器本体的作用,使得缠绕物体在切碎时,防止碎料通过球形切割网的网孔并残留在传感器本体上,进一步降低对传感器本体的损害,提升了整个水质监测传感器的使用寿命,以及提升检测的准确性。
优选的,所述球形阻挡网一的网孔孔径大于球形切割网的网孔孔径。
优选的,所述球形切割网的网孔孔径大于球形阻挡网二的网孔孔径。
优选的,所述球形切割网的网丝上设置有多个切割刃,所述切割刃的切割方向为切割刃绕着转轴二旋转的周向方向。
优选的,所述球形阻挡网一包括钢丝主体网、以及设置在所述钢丝主体网外表面上的光滑层。设置光滑层,进一步降低水体中的物体在球形阻挡网一的残留。
优选的,光滑层包括釉层。
综上所述,本发明具有以下有益效果:
1:通过行走架上转动盘、水平移动结构以及竖向移动机构的动作,能够将水质监测传感器送至检测的水域,替代了人工操作,方便、安全;
2:竖连接轴在两侧调节弹簧的作用下,能够自适应地调整位置,这样就能使行走机构适应水下复杂的地形;
3:运动状态的球形阻挡网一既能降低水中物体对传感器本体的损害,提升了整个水质监测传感器的使用寿命,并且不易残留甚至残绕水草、腐败枝叶,检测精度更好;
4:球形切割网的设置,将进入到球形阻挡网一中的物体切断、切碎,防止缠绕物体的堆积,防止堵塞球形阻挡网一上的网孔,进而防止影响到球形阻挡网一内部的水质,进一步提升传感器的测量准确性;
5:球形阻挡网二的设置,进一步起到隔离传感器本体的作用,使得缠绕物体在切碎时,防止碎料通过球形切割网的网孔并残留在传感器本体上,进一步降低对传感器本体的损害,提升了整个水质监测传感器的使用寿命,以及提升检测的准确性;
6:整个水质监测传感器,涉及到的零部件组成数量上较少,仅具有球形阻挡网一、安装盒体、传感器本体、球形切割网、球形阻挡网二、转轴一、转轴二等部件,结构简单,而且,转轴一以及转轴二共同承担水体对安装盒体的冲击力,转轴一以及转轴二不易变形,整个水质监测传感器的结构强度好,稳定性好,水体流速的上限适用值更大。
附图说明
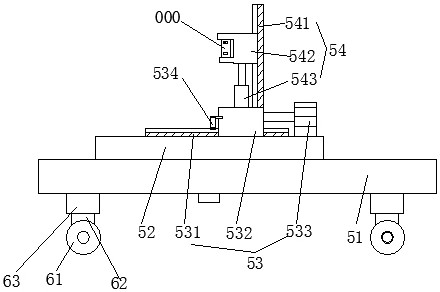
图1为机器人的结构示意简图;
图2为安装套与竖连接轴的连接示意图;
图3为水质监测传感器的剖视示意简图;
图4为球形阻挡网一的平铺示意简图;
图5为球形阻挡网一的结构示意简图。
具体实施方式
下面将结合附图,通过具体实施例对本发明作进一步说明。
实施例:如图1-2所示,一种水下机器人,包括行走架、水质监测传感器000,所述行走架包括架体51、设置在所述架体51上的转动盘52、设置在所述转动盘52上的水平移动结构53、设置在所述水平移动结构53上的竖向移动机构54,所述水质监测传感器000安装在所述竖向移动机构54上;
所述水平移动结构53包括设置在所述转动盘52上的水平滑轨531、设置在所述水平滑轨531上的水平滑块532、和所述水平滑块532连接的水平驱动气缸533;
所述竖向移动机构54包括设置在所述水平滑块532上的竖向滑轨541、设置在所述竖向滑轨541上的竖向滑块542、和所述竖向滑块542连接的竖直驱动气缸543。
本技术方案中,通过行走架上转动盘52、水平移动结构53以及竖向移动机构54的动作,能够将水质监测传感器000送至检测的水域,替代了人工操作,方便、安全。
优选的,所述架体51上设置有多个行走机构;所述行走机构包括行走轮61、用于安装所述行走轮61的竖连接轴62、设置在所述架体51上的用于安装所述竖连接轴62的安装套63,所述竖连接轴62滑动设置在安装套63中。
一般而言,竖连接轴62的直径与安装套63的直径相同,当泥沙进入到安装套63中,会影响竖连接轴62在滑动,故优选的,所述安装套63包括套体631,套体631包括竖槽632,所述竖槽632中设置有和所述竖连接轴62连接的缓冲弹簧633,所述竖槽632的两侧设置有和所述竖槽632连接的横槽634,所述横槽634中设置有调节弹簧635,所述竖连接轴62的两侧设置有限位在所述横槽634的限位块636。此设置,竖连接轴62与竖槽632之间的间距可以做大,降低泥沙对竖连接轴62滑动时的影响,并且,竖连接轴62在两侧调节弹簧635的作用下,能够自适应地调整位置,这样就能使行走机构适应水下复杂的地形。
优选的,所述套体631上设置有和所述横槽634连通的排杂口637。防止横槽634中泥沙堆积而影响到调节弹簧635的伸缩。
优选的,所述水平滑块532上设置有用于对水平滑轨531进行清扫的清理刷534。
如图3所示,所述水质监测传感器000包括球形阻挡网一1、设置在所述球形阻挡网一1中的安装盒体2,所述安装盒体2上设置有传感器本体21,安装盒体2为密封件,内部设置能够为传感器本体21供电的电源,所述安装盒体2的中间部位处设有和所述球形阻挡网一1相固定连接并伸出到所述球形阻挡网一1之外的转轴一22,所述转轴一22通过轴承安装在安装盒体2上,转轴一22的另一端安装在竖向滑块542上,由外接的电机提供旋转动力。本技术方案中,球形阻挡网一1起到隔离传感器本体21的作用,降低水中物体对传感器本体21的损害,提升了整个水质监测传感器000的使用寿命,并且通过转轴一22的转动带动球形阻挡网一1转动,转动状态下的球形阻挡网一1不易残留甚至残绕水草、腐败枝叶,检测精度更好。
该水质监测传感器000,还是存在着水体中的水草、腐败枝叶等易缠绕的物体缠绕在球形阻挡网一1并且这些缠绕物体在流动水体的作用下进入到球形阻挡网一1内部的现象,这种情况的发生,会堵塞球形阻挡网一1上的网孔,进而影响到球形阻挡网一1内部的水质,导致最终的检测准确性会存在较大的偏差,为此,本实施例,该水质监测传感器000还包括设置在所述球形阻挡网一1内部的球形切割网3,所述安装盒体2位于所述球形切割网3内部,且安装盒体2的中间部位处还设有和所述球形切割网3相固定连接的并伸出到所述球形阻挡网一1之外的转轴二23,转轴二23通过轴承安装在安装盒体上,转轴二23的另一端也安装在竖向滑块542上,由外接的电机提供旋转动力,所述转轴二23与所述转轴一22位于所述安装盒体2的两侧,所述球形阻挡网一1上设置有供所述转轴二23穿过的穿过孔一11,所述球形切割网3上设置有供所述转轴一22穿过的穿过孔二31,此结构,转轴一22以及转轴二23共同承担水体对安装盒体2的冲击力,转轴一22以及转轴二23不易变形,整个水质监测传感器000的结构强度好,稳定性好,水体流速的上限适用值更大。当水体中的水草、腐败枝叶等易缠绕的物体缠绕在球形阻挡网一1并且这些缠绕物体在流动水体的作用下进入到球形阻挡网一1内部时,转轴二23带动球形切割网3转动,将进入到球形阻挡网一1中的物体切断、切碎,防止缠绕物体的堆积,防止堵塞球形阻挡网一1上的网孔,进而防止影响到球形阻挡网一1内部的水质,进一步提升传感器的测量准确性。本实施例,球形切割网3的网丝上设置有多个切割刃,所述切割刃的切割方向为切割刃绕着转轴二23旋转的周向方向,切割刃在附图中未示意出,为了将处于球形阻挡网一1与球形切割网3的碎片及时排出,所述球形阻挡网一1的网孔孔径大于球形切割网3的网孔孔径。
当缠绕物体切碎后,碎片或者碎件还是存在通过球形切割网3的网孔并残留在传感器本体21上的隐患,故,进一步的,水质监测传感器000还包括设置在所述球形切割网3内部的球形阻挡网二4,所述安装盒体2位于所述球形阻挡网二4内部,且球形阻挡网二4和所述转轴二23固定连接,所述球形阻挡网二4上设置有供所述转轴一22穿过的穿过孔三41。球形阻挡网二4的设置,进一步起到隔离传感器本体21的作用,使得缠绕物体在切碎时,防止碎料通过球形切割网3的网孔并残留在传感器本体21上,进一步降低对传感器本体21的损害,提升了整个水质监测传感器000的使用寿命,以及提升检测的准确性,为此,需要对球形阻挡网二4的网孔大小有一定的要求,即所述球形切割网3的网孔孔径大于球形阻挡网二4的网孔孔径,及时将球形切割网3与球形阻挡网二4之间的碎片及时排出。
优选的,如图4-5所示,所述球形阻挡网一1包括钢丝主体网12、以及设置在所述钢丝主体网12外表面上的光滑层13。设置光滑层13,进一步降低水体中的物体在球形阻挡网一1的残留,光滑层可以为釉层。
上面所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的构思和范围进行限定。在不脱离本发明设计构思的前提下,本领域普通人员对本发明的技术方案做出的各种变型和改进,均应落入到本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
- 水下机器人供能系统、水下机器人及水下机器人群系统
- 一种水下机器人组件以及水下机器人