一种自动化鸡蛋托盘生产设备
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及一种生产设备,尤其涉及一种自动化鸡蛋托盘生产设备。
背景技术
传统的鸡蛋托盘存在有以下不足之处:在运输过程中,鸡蛋会在鸡蛋托盘里晃动,导致鸡蛋容易损坏,由于鸡蛋的大小不一,鸡蛋放置孔的大小都是一致的,在放置的过程中个头小的鸡蛋容易从鸡蛋托盘中滑落,甚至会摔碎,造成一定的损失,因此可以考虑制作更符合鸡蛋形状的模型,来解决该类问题。在制作鸡蛋托盘的过程中,经常会出现以下问题:纸浆的消耗量较大,需要人工额外进行装填,增加了工人的劳动强度,制作好的鸡蛋托盘需要人工进行收料,但是由于鸡蛋托盘成型后是湿坯,由人工进行收料与搬运,容易对鸡蛋托盘造成损坏,从而影响成品率,以及降低了生产的效率。
因此,需要提供一种无需人工进行收料与入料,生产效率高,不易对鸡蛋托盘造成损坏且具有更符合鸡蛋形状模型的自动化鸡蛋托盘生产设备,来解决上述问题。
发明内容
为了克服由人工进行收料与搬运,容易对鸡蛋托盘造成损坏,从而影响成品率,以及降低了生产的效率的缺点,提供一种无需人工进行收料与入料,生产效率高,不易对鸡蛋托盘造成损坏且具有更符合鸡蛋形状模型的自动化鸡蛋托盘生产设备。
本发明的技术实施方案是:一种自动化鸡蛋托盘生产设备,包括有:底板,底板用于安装整个设备;支撑架,支撑架设置在底板顶部的一侧;伺服电机,伺服电机设置在支撑架顶部;成模机构,成模机构设置在底板顶部中部;入料机构,入料机构设置在底板与成模机构之间;传送机构,传送机构设置在底板顶部的一侧。
进一步地,成模机构包括有:储料筐,储料筐设置在底板顶部靠近传送机构的一部;第一支撑板,第一支撑板设置在底板顶部靠近支撑架的一侧;第二支撑板,第二支撑板对称设置在底板顶部,第二支撑板的数量为两个;第三支撑板,第三支撑板设置在底板顶部靠近储料筐的一侧;第一转轴,第一转轴设置在伺服电机输出端,第一转轴与第一支撑板转动式连接;第二转轴,第二转轴转动式设置在第二支撑板之间;倒模机,倒模机设置在第二转轴上;第四支撑板,第四支撑板对称设置在底板顶部远离储料筐的一侧,第四支撑板的数量为两个;第五支撑板,第五支撑板对称设置在底板顶部靠近第四支撑板的一侧,第五支撑板的数量为两个;第三转轴,第三转轴转动式设置在第五支撑板之间;第一连接板,第一连接板设置在第三转轴上;滑块,滑块分别转动式设置在第四支撑板上部,滑块的数量为两个;第一导向板,第一导向板滑动式设置在滑块之间,第一导向板与第一连接板转动式连接;第二连接板,第二连接板设置在第三转轴上;第一连接杆,第一连接杆设置在第二连接板上;第三连接板,第三连接板转动式设置在第一连接杆上;第四连接板,第四连接板转动式设置在第三连接板上;第二连接杆,第二连接杆转动式设置在第三支撑板上,第二连接杆与第四连接板相连接;第一皮带轮组件,第一皮带轮组件设置在第一转轴与第二连接杆之间;凸圆,凸圆设置在第一转轴上;异形转盘,异形转盘设置在第二转轴靠近支撑架的一端,异形转盘与凸圆相配合;过滤管,过滤管设置在储料筐内底部。
进一步地,入料机构包括有:装料桶,装料桶设置在底板顶部靠近储料筐的一侧;第六支撑板,第六支撑板设置在储料筐靠近装料桶一侧的顶部;第二导向板,第二导向板对称设置在储料筐内部,第二导向板的数量为两个;第三连接杆,第三连接杆滑动式设置在第二导向板之间;浮力球,浮力球分别设置在第三连接杆上,浮力球的数量为两个;连接管,连接管设置在第六支撑板上,连接管的另一端与装料桶相连接;滑轨,滑轨设置在靠近支撑架一侧的第二导向板上部;齿条,齿条滑动式设置在滑轨上;第四连接杆,第四连接杆转动式设置在连接管上;第一齿轮,第一齿轮设置在第四连接杆上,第一齿轮与齿条相啮合。
进一步地,传送机构包括有:第七支撑板,第七支撑板对称设置在底板顶部远离装料桶的一侧,第七支撑板的数量为两个;第八支撑板,第八支撑板设置在底板顶部靠近支撑架的一侧;第九支撑板,第九支撑板对称设置在底板顶部靠近第一支撑板的一侧,第九支撑板的数量为两个;第四转轴,第四转轴转动式设置在第九支撑板之间;第五转轴,第五转轴转动式设置在第七支撑板之间;第二皮带轮组件,第二皮带轮组件设置在第一转轴与第四转轴之间;传送带,传送带设置在第四转轴与第五转轴之间;拨杆,拨杆均设置在传送带两侧,拨杆的数量为多个。
进一步地,还包括有:收纳筐,收纳筐设置在底板顶部靠近第七支撑板的一侧;把手,把手设置在收纳筐上。
进一步地,还包括有:固定框,固定框设置在底板顶部靠近收纳筐的一侧;卡扣,卡扣分别设置在固定框两侧,卡扣的数量为两个;卡块,卡块对称设置在收纳筐靠近把手的一侧,卡扣与卡块相配合。
进一步地,还包括有:第六转轴,第六转轴分别转动式设置在第七支撑板之间,第六转轴的数量为两个;第二齿轮,第二齿轮均设置在第六转轴两侧,第六转轴的数量为四个,一侧的两个第二齿轮均相互啮合;推板,推板对称设置在下部的第六转轴上,推板的数量为两个,推板与拨杆相配合;限位环,限位环分别转动式设置在上部的第六转轴上,限位环的数量为两个;转板,转板设置在上部的第六转轴上;扭力弹簧,扭力弹簧分别设置在转板与限位环之间,扭力弹簧均套在上部的第六转轴上,扭力弹簧的数量为两个。
进一步地,倒模机上的模型为更符合鸡蛋形状的模型。
本发明的有益效果在于:1、采用凸圆、异形转盘和各个连接板之间的配合,凸圆转动一圈带动异形转盘转动四分之一圈,实现了第一导向板不断对倒模机的纸浆进行挤压成型,提高了鸡蛋托盘的生产效率。
2、采用浮力球、齿条与第二齿轮之间的配合,通过浮力球判断储料筐内的水量,通过齿条与第二齿轮相啮合控制连接管闸门的开关,实现了在储料筐数量较少时可以自动蓄水的效果。
3、采用推板、拨杆与转板之间的配合,使拨杆压动推板,从而带动转板向上摆动90度,实现了鸡蛋托盘的自动下料,方便了成品的收集工作,降低了劳动强度。
4、采用更加符合鸡蛋形状模型的倒模机,避免了由于鸡蛋个体的大小差异和在运输过程中容易晃动造成损失,使模型更加贴合鸡蛋的形状,从而增加鸡蛋的稳定性。
附图说明
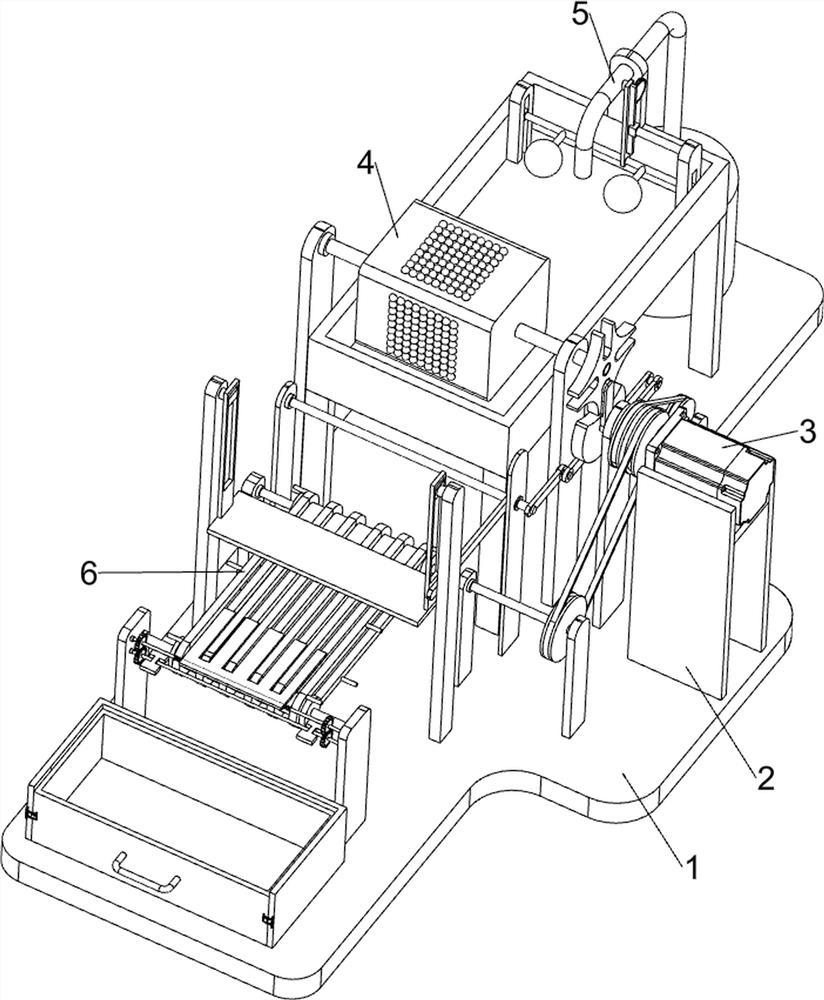
图1为本发明的立体结构示意图。
图2为本发明的第一部分立体结构示意图。
图3为本发明的第二部分立体结构示意图。
图4为本发明的第三部分立体结构示意图。
图5为本发明的第四部分立体结构示意图。
其中,上述附图包括以下附图标记:1-底板,2-支撑架,3-伺服电机,4-成模机构,40-储料筐,41-第一支撑板,42-第二支撑板,43-第三支撑板,44-第一转轴,45-第二转轴,46-倒模机,47-第四支撑板,48-第五支撑板,49-第三转轴,410-第一连接板,411-第一导向板,412-滑块,413-第二连接板,414-第一连接杆,415-第三连接板,416-第四连接板,417-第二连接杆,418-第一皮带轮组件,419-凸圆,420-异形转盘,421-过滤管,5-入料机构,50-装料桶,51-第六支撑板,52-第二导向板,53-第三连接杆,54-浮力球,55-连接管,56-滑轨,57-齿条,58-第四连接杆,59-第一齿轮,6-传送机构,60-第七支撑板,61-第八支撑板,62-第九支撑板,63-第四转轴,64-第五转轴,65-第二皮带轮组件,66-传送带,67-拨杆,7-收纳筐,8-把手,9-固定框,10-卡扣,11-卡块,12-第六转轴,13-第二齿轮,14-推板,15-扭力弹簧,16-转板,17-限位环。
具体实施方式
以下结合附图和具体实施方式对本发明作进一步详细描述,但不限制本发明的保护范围和应用范围。
实施例1
一种自动化鸡蛋托盘生产设备,如图1所示,包括有底板1、支撑架2、伺服电机3、成模机构4、入料机构5和传送机构6,底板1顶部前侧设有支撑架2,支撑架2顶部设有伺服电机3,底板1顶部中部设有成模机构4,底板1与成模机构4之间设有入料机构5,底板1顶部左侧设有传送机构6。
工作人员将纸浆倒入成模机构4内,在入料机构5内灌满水,入料机构5对成模机构4内的纸浆进行补充,当纸浆充满时,入料机构5停止工作,然后启动伺服电机3工作,伺服电机3带动成模机构4工作,成模机构4使纸浆挤压成型,制成鸡蛋托盘,并将成型后的鸡蛋托盘移动至传送机构6,同时伺服电机3通过成模机构4带动传送机构6工作,传送机构6将成型的鸡蛋托盘传送至设备外,成模机构4不断制作鸡蛋托盘,当纸浆较少时,入料机构5再次对纸浆进行补充,当全部鸡蛋托盘制作完毕后,关闭伺服电机3。
实施例2
在实施例1的基础之上,如图2、图3、图4和图5所示,成模机构4包括有储料筐40、第一支撑板41、第二支撑板42、第三支撑板43、第一转轴44、第二转轴45、倒模机46、第四支撑板47、第五支撑板48、第三转轴49、第一连接板410、第一导向板411、滑块412、第二连接板413、第一连接杆414、第三连接板415、第四连接板416、第二连接杆417、第一皮带轮组件418、凸圆419、异形转盘420和过滤管421,底板1顶部右部设有储料筐40,底板1顶部前侧设有第一支撑板41,底板1顶部设有多个第二支撑板42,底板1顶部右前侧设有第三支撑板43,伺服电机3输出端设有第一转轴44,第一转轴44与第一支撑板41转动式连接,第二支撑板42之间转动式连接有第二转轴45,第二转轴45上连接有倒模机46,底板1顶部左侧对称设有第四支撑板47,底板1顶部左部对称设有第五支撑板48,第五支撑板48之间转动式连接有第三转轴49,第三转轴49上连接有第一连接板410,第四支撑板47上部均转动式连接有滑块412,滑块412之间滑动式连接有第一导向板411,第一导向板411与第一连接板410转动式连接,第三转轴49前端连接有第二连接板413,第二连接板413上连接有第一连接杆414,第一连接杆414上转动式连接有第三连接板415,第三连接板415上转动式连接有第四连接板416,第三支撑板43上转动式连接有第二连接杆417,第二连接杆417与第四连接板416相连接,第一转轴44与第二连接杆417之间连接有第一皮带轮组件418,第一转轴44上连接有凸圆419,第二转轴45前端连接有异形转盘420,异形转盘420与凸圆419相配合,储料筐40内底部连接有过滤管421。
工作人员在储料筐40内倒入纸浆,伺服电机3工作带动第一转轴44转动,第一转轴44带动凸圆419转动,当凸圆419转动至不与异形转盘420相接触时,第二转轴45不转动,从而倒模机46不转动,同时第一转轴44转动通过第一皮带轮组件418带动第二连接杆417转动,第二连接杆417转动带动第四连接板416转动,此时第四连接板416向上转动,第四连接板416通过第三连接板415带动第二连接板413转动,第二连接板413带动第三转轴49转动,第三转轴49通过第一连接板410带动第一导向板411向上滑动同时带动滑块412转动,使第一导向板411底部与倒模机46的模型相接触,第一导向板411对倒模机46上的纸浆进行挤压成型,当凸圆419转动至与异形转盘420相接触时,凸圆419转动一圈带动异形转盘420转动四分之一圈,从而通过第二转轴45带动倒模机46转动四分之一圈,使倒模机46新的一面蘸取纸浆,同时第四连接板416向下转动,从而带动第一导向板411向下滑动同时带动滑块412转动,使第一导向板411带动成型的鸡蛋托盘复位,将鸡蛋托盘移动至传送机构6上方并落在传送机构6内,当全部鸡蛋托盘制作完毕后,工作人员需要对倒模机46进行清洗,在清洗过程中,使水通过过滤管421流出,使纸浆原料留在储料筐40内,方便二次循环利用。
入料机构5包括有装料桶50、第六支撑板51、第二导向板52、第三连接杆53、浮力球54、连接管55、滑轨56、齿条57、第四连接杆58和第一齿轮59,底板1顶部右侧设有装料桶50,储料筐40右侧顶部设有第六支撑板51,储料筐40内部对称设有第二导向板52,第二导向板52之间滑动式连接有第三连接杆53,第三连接杆53左侧连接有两个浮力球54,第六支撑板51上连接有连接管55,连接管55的另一端与装料桶50相连接,前侧的第二导向板52上部连接有滑轨56,滑轨56上滑动式连接有齿条57,连接管55外侧转动式连接有第四连接杆58,第四连接杆58上连接有第一齿轮59,第一齿轮59与齿条57相啮合。
工作人员将水灌入装料桶50内,当储料筐40内水位较低时,水从连接管55不断灌入储料筐40内,当储料筐40水位上升时,通过浮力球54带动第三连接杆53向上移动,第三连接杆53带动齿条57向上移动,齿条57通过与第一齿轮59相啮合带动第四连接杆58转动,第四连接杆58转动带动连接管55内的阀门转动,使阀门关闭,当储料筐40内水位降低时,通过浮力球54带动第三连接杆53向下移动,第三连接杆53带动齿条57向下移动,齿条57通过与第一齿轮59相啮合带动第四连接杆58转动,第四连接杆58转动带动连接管55内的阀门转动,使阀门再次开启,从而达到控制水量的效果。
传送机构6包括有第七支撑板60、第八支撑板61、第九支撑板62、第四转轴63、第五转轴64、第二皮带轮组件65、传送带66和拨杆67,底板1顶部左侧对称设有第七支撑板60,底板1顶部左前侧设有第八支撑板61,底板1顶部左部对称设有第九支撑板62,第九支撑板62之间转动式连接有第四转轴63,第四转轴63与第八支撑板61转动式连接,第七支撑板60之间转动式连接有第五转轴64,第一转轴44与第四转轴63之间连接有第二皮带轮组件65,第四转轴63与第五转轴64之间连接有传送带66,传送带66两侧设有多个拨杆67。
第一导向板411上的鸡蛋托盘落在传送带66上,第一转轴44通过第二皮带轮组件65带动第四转轴63转动,第四转轴63转动带动传送带66与第五转轴64转动,传送带66带动鸡蛋托盘与拨杆67沿传送带66运动方向移动,此时工作人员可以对成型的鸡蛋托盘进行收集。
实施例3
在实施例2的基础之上,如图5所示,还包括有收纳筐7和把手8,底板1顶部左侧设有收纳筐7,收纳筐7左侧设有把手8。
传送带66带动鸡蛋托盘向左移动,使鸡蛋托盘掉落至收纳筐7内,当鸡蛋托盘全部制作完毕后,工作人员可以拉动把手8将收纳筐7拉出,从而收集成型的鸡蛋托盘。
还包括有固定框9、卡扣10和卡块11,底板1顶部左侧设有固定框9,固定框9两侧分别设有卡扣10,收纳筐7左侧对称设有卡块11,卡扣10与卡块11相配合。
工作人员可以将收纳筐7放置在固定框9内,向内摆动卡扣10,使卡扣10与卡块11接触,从而对收纳筐7进行固定,当需要取出收纳筐7时,向外摆动卡扣10,再拉动把手8将收纳筐7拉出。
还包括有第六转轴12、第二齿轮13、推板14、扭力弹簧15、转板16和限位环17,第七支撑板60之间转动式连接有两个第六转轴12,第六转轴12两侧均连接有第二齿轮13,一侧的两个第二齿轮13均相互啮合,下部的第六转轴12上对称连接有推板14,推板14均与拨杆67相配合,上部的第六转轴12上转动式连接有两个限位环17,上部的第六转轴12上连接有转板16,转板16与限位环17之间均连接有扭力弹簧15,扭力弹簧15均套在上部的第六转轴12上。
传送带66带动鸡蛋托盘移动至转板16上,当拨杆67移动至与推板14的右侧相接触时,拨杆67向下压动推板14右侧,从而带动下部的第六转轴12转动,下部的第六转轴12转动通过两个第二齿轮13相啮合带动上部的第六转轴12转动,从而带动转板16转动90度,扭力弹簧15均发生形变,使转板16上的鸡蛋托盘滑落至收纳筐7内,当拨杆67移动至不与推板14相接触时,在扭力弹簧15的复位作用下,带动转板16与上部的第六转轴12转动复位,从而通过两个第二齿轮13相啮合带动下部的第六转轴12与推板14转动复位。
以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种自动化鸡蛋托盘生产设备
- 一种基于物联网的全自动化鸡蛋饲料生产设备