一种列车车轮踏面锥形孔检测的自适应缺陷识别方法
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及图像处理技术领域,具体涉及一种列车车轮踏面锥形孔检测的自适应缺陷识别方法。
背景技术
高速铁路技术飞速发展,在高速列车的运行速度不断提高的同时,其安全问题也应越来越受到重视。列车车轮是轨道车辆的关键部件之一,其健康与否直接关系到整个列车以及乘客的安危。紧急制动时车轮的摩擦、轮对与钢轨间的冲撞以及转弯时轮对轨面的相对滑动都会造成踏面损伤,无论何种损伤,都会严重影响列车运行质量和风险,所以对于车轮踏面做图像检测判断是否有缺陷显得尤为重要。然而在实际拍摄处于运动状态的踏面图像时,很容易受到拍摄环境与条件的影响,因此这里研究一种针对锥形孔缺陷检测识别的算法,利用二值化结果能够将车轮踏面的缺陷细节显示出来。
发明内容
本发明的目的是提供一种列车车轮踏面锥形孔检测的自适应缺陷识别方法,能够在存在局部曝光的情况下改变光照情况,识别出损伤区域并且标注出来。
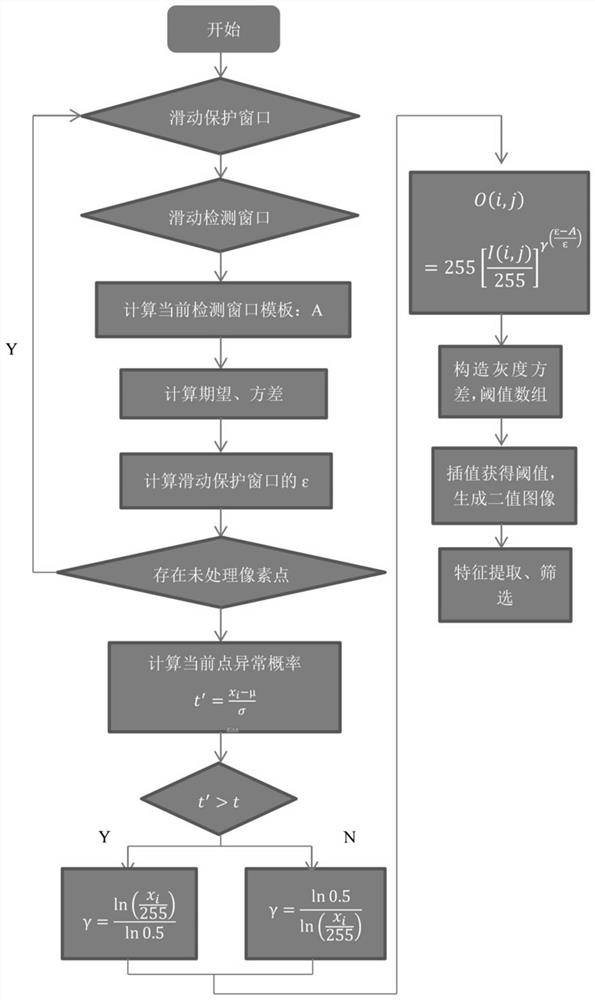
为了达到上述技术目的,本发明采用如下技术方案:一种列车车轮踏面锥形孔检测的自适应缺陷识别方法,包括以下几个步骤:
1)获取待处理的图像,将其像素值矩阵由RGB颜色空间转换到Lab颜色空间,分离出三个颜色通道;
2)设置滑动保护窗口和滑动检测窗口,计算滑动检测窗口内像素点的期望、方差、滑动保护窗口的ε和当前检测窗口模板A;
3)计算当前图像像素点异常概率;
4)根据步骤3)计算所得概率判别图像像素点是否异常,对异常的图像进行Gamma自适应矫正;
5)循环遍历整张图像,得到最终Gamma矫正后的每个窗口的模板,将每个模板按照顺序填放在与原图像等大的矩阵中,得到矫正后的图像;
6)对步骤5)中矫正后的图像计算一组灰度值方差并选取对应的阈值作为标准;
7)利用插值方法确定阈值,生成二值化图像;
8)对步骤7)中所生成的二值化图像进行特征分析和提取,筛选出可疑区域作为缺陷识别的结果,并标注出来。
进一步的,所述步骤1)中将图像像素值矩阵由RGB颜色空间转换到Lab颜色空间的计算公式如下:
其中,X
进一步的,所述步骤2)包括:选M×M大小的滑动保护窗口,选N×N大小的滑动检测窗口,步长为S;其中,M,N为保护窗口和检测窗口的边长,N 滑动检测窗口内像素点的期望μ的计算公式为: 滑动保护窗口的ε的计算公式为: 滑动保护窗口的方差δ的计算公式为: 其中,K为滑动检测窗口内的像素点总数,x 进一步的,所述步骤3)中当前点异常概率的计算方法为,正常点标记为T,异常点标记为F,当前像素点值记作x P(T|x P(F|x 在光照强度分量中,图像的光照呈高斯分布,将判别式 进一步的,所述步骤4)中图像像素点是否异常的判别方法为: 根据纽曼—皮尔逊准则,如果t′<t,则为异常光照点,否则为正常光照点;其中,t为异常光照点的检测概率,由异常点概率P 进一步的,所述步骤4)中对异常的图像进行Gamma自适应矫正方法为: 标准Gamma矫正 将控制参数γ用
若为光照正常点,则 进一步的,所述步骤6)包括,将步骤5)中矫正好的图像转变为灰度图,计算灰度图的踏面区域灰度方差,并选择相应的阈值φ便于二值图像能够清晰的表达出踏面信息,计算多幅图像作为样本,得到方差和阈值一一对应的两组数组[δ 进一步的,所述步骤7)包括,对步骤6)中计算的方差进行放缩,将形如f(x)=a 进一步的,所述步骤8)中特征分析和提取是根据形状参数法或几何参数法进行的; 所述形状参数法为,设定一面积阈值,当轮廓面积大于或者小于这一阈值时,将所选区域排除,保留剩余区域; 所述几何参数法为,通过空间关系特征来进行筛选,空间关系包括上下左右关系或目标之间的相对距离以及方位。 有益效果: 本发明提供的一种列车车轮踏面锥形孔检测的自适应缺陷识别方法,能够在存在局部曝光的情况下改变光照情况,识别出损伤区域并且标注出来。 附图说明 图1车轮踏面锥形孔原图; 图2某种自适应二值化结果图; 图3本方法二值图; 图4本发明实施例中的算法流程图; 图5本发明实施例中的滑动窗口原理图; 图6缺陷识别结果图。 具体实施方案 为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图进行进一步详细说明。 一种列车车轮踏面锥形孔检测的自适应缺陷识别方法,如图4所示,包括以下几个步骤: 1)获取待处理的图像,将其像素值矩阵由RGB颜色空间转换到Lab颜色空间,分离出三个颜色通道; 所述将图像像素值矩阵由RGB颜色空间转换到Lab颜色空间的计算公式如下:
其中,X 2)设置滑动保护窗口和滑动检测窗口,计算滑动检测窗口内像素点的期望、方差、滑动保护窗口的ε和当前检测窗口模板A; 如图5所示,选M×M大小的滑动保护窗口,选N×N大小的滑动检测窗口,步长为S;其中,M,N为保护窗口和检测窗口的边长,N 滑动检测窗口内像素点的期望μ的计算公式为: 滑动保护窗口的ε的计算公式为: 滑动保护窗口的方差δ的计算公式为: 其中,K为滑动检测窗口内的像素点总数,x 3)计算当前图像像素点异常概率; 当前点异常概率的计算方法为,正常点标记为T,异常点标记为F,当前像素点值记作x P(T|x P(F|x 在光照强度分量中,图像的光照呈高斯分布,将判别式 4)根据步骤3)计算所得概率判别图像像素点是否异常,对异常的图像进行Gamma自适应矫正。 所述图像像素点是否异常的判别方法为: 根据纽曼—皮尔逊准则,如果t′<t,则为异常光照点,否则为正常光照点;其中,t为异常光照点的检测概率,由异常点概率P 在视觉成像中人观察到的颜色感觉和到达眼睛的亮度值无关,而是与整体反射率有关。另一方面,进入摄像头的光照除了物体发射的光线之外还有直接进入摄像头的光线。如果在不适当的角度,或者强烈的光照两者想家则会产生“过曝”现象,拍摄设备可以调整避免全局过曝,对于物体高反射率形成的局部过曝调节能力有限,因此在该方法中加入了Gamma自适应矫正。 所述对异常的图像进行Gamma自适应矫正方法为: 标准Gamma矫正 将控制参数γ用
若为光照正常点,则 5)循环遍历整张图像,得到最终Gamma矫正后的每个窗口的模板,将每个模板按照顺序填放在与原图像等大的矩阵中,得到矫正后的图像; 6)对矫正后的图像计算一组灰度值方差并选取对应的阈值作为标准; 将步骤5)中矫正好的图像转变为灰度图,计算灰度图的踏面区域灰度方差;由于车轮踏面的拍摄环境较暗,在削弱了局部曝光影响之后,找到相应的阈值φ便于二值图像能够清晰的表达出踏面信息,计算多幅图像作为样本,得到方差和阈值一一对应的两组数组[δ 7)利用插值方法确定阈值,生成二值化图像; 计算得到的方差较为接近,同时可能存在阈值动态范围较小以及多方差对应同一阈值的情况,针对这种情况可以对计算的方差进行适当的放缩。对步骤6)中计算的方差进行放缩,将形如f(x)=a 8)根据形状参数法或几何参数法对步骤7)所生成的二值化图像进行特征分析和提取,筛选出可疑区域作为缺陷识别的结果,并标注出来,如图6所示。 在得到的二值图像上,作进一步处理,做最小外接轮廓,根据技术要求筛选特征,对于锥形孔缺陷,可以通过形状特征筛选,具体有形状参数法(长度、面积等),设定一面积阈值,当轮廓面积大于或者小于这一阈值时,将所选区域排除,保留剩余区域,还有几何参数法(圆度等),还可以通过空间关系特征来进行筛选,如上下左右关系,又如目标之间的相对距离以及方位。针对不同的技术要求,设定不同的筛选条件。 上述实施例仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和等同替换,这些对本发明权利要求进行改进和等同替换后的技术方案,均落入本发明的保护范围。
- 一种列车车轮踏面锥形孔检测的自适应缺陷识别方法
- 高速列车车轮踏面缺陷检测的多探头电磁超声检测装置及其检测方法