车轮速度传感器
文献发布时间:2023-06-19 10:16:30
本申请为2016年11月25日提交的、申请号为201611062959.3的、发明名称为“车轮速度传感器”的申请的分案申请。
技术领域
本发明涉及车轮速度传感器。
背景技术
目前,在车辆搭载有防止制动时的车轮的抱死的防抱死制动系统和/或防止起步时的滑移的牵引控制系统等,作为上述系统的一部分,使用计测车轮的转速的车轮速度传感器。例如,专利文献1公开的车轮速度传感器中,作为传感器部发挥功能的霍尔IC20以由树脂成形部30覆盖的方式埋设,构成四棱柱部分11。该四棱柱部分11以与和车轮一体旋转的转子对向的方式固定于车辆主体,在车轮旋转时,树脂模制品内的霍尔IC20检测由转子的旋转引起的磁场变动,产生与转速对应的电信号。
在先技术文献
专利文献
专利文献1:日本特开2014-130100号公报
发明内容
发明要解决的课题
在以往的车轮速度传感器中,通常是如下结构:对于一个转子在接近位置仅配置一个传感器部,通过来自该传感器部的电信号来检测转子的转速、即车轮的转速。然而,在仅使一个传感器部与一个转子相对的结构中,存在在传感器部发生了故障等的情况下无法进行检测的问题。
另一方面,作为解决该问题的方法,例如可考虑通过使两个以上的专利文献1那样的车轮速度传感器与一个转子接近配置来使检测信号多路化的方法。然而,在该方法中,与仅使一个车轮速度传感器接近配置的结构相比,存在会使部件个数、安装工时和安装空间全都大幅增大的问题。
本发明基于上述的情况而完成,目的在于以抑制了部件个数、安装工时、安装空间的方式实现能够利用多个系统来输出反映了车轮速度的检测信号的结构。
用于解决课题的方案
本发明的车轮速度传感器具有:
多个检测元件部,检测由与车轮一起旋转的被检测体的旋转引起的磁场变动,并转换成电信号;
多个输出电线部,构成为与多个所述检测元件部分别对应的输出路径,传送与各个所述检测元件部的输出对应的信号;及
固定构件,构成为固定于车辆的构件,一体地保持多个所述检测元件部。
发明效果
在本发明中,设有多个能够检测由与车轮一起旋转的被检测体的旋转引起的磁场变动的检测元件部,并设有输出电线部作为与这些检测元件部分别对应的输出路径。由此,能够利用多个系统来输出反映了车轮速度的检测信号。此外,设有固定构件作为固定于车辆的构件,该固定构件具有一体地保持多个检测元件部的结构。根据该结构,与将多个车轮速度传感器分别安装于车辆而实现多路化的结构相比,能够抑制部件个数、安装工时和安装空间。
附图说明
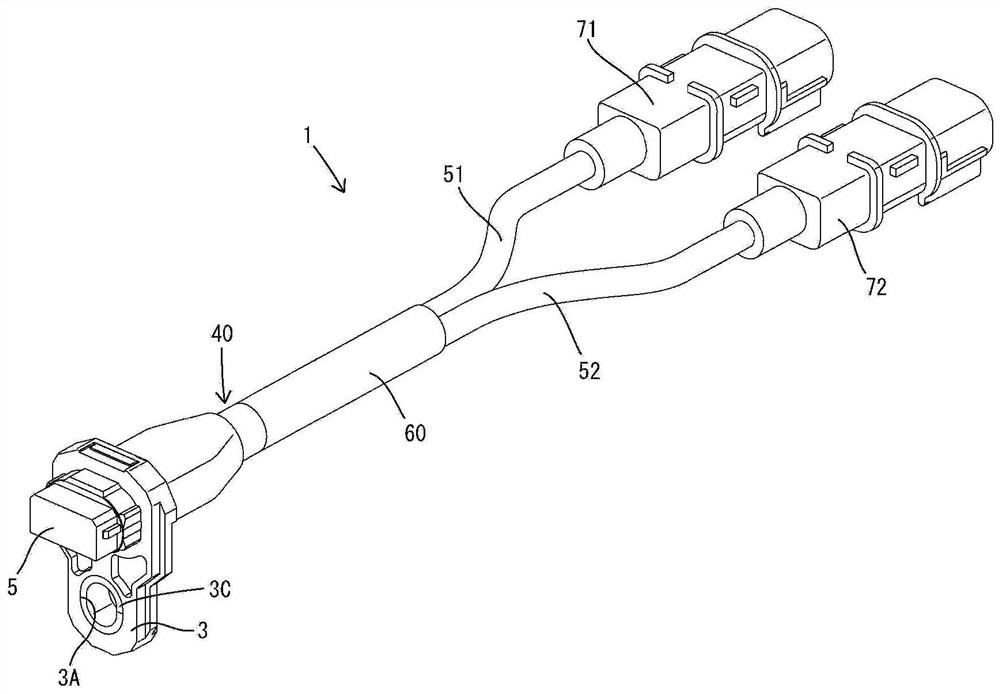
图1是表示实施例1的车轮速度传感器的立体图。
图2是表示实施例1的车轮速度传感器的一部分的俯视图。
图3是表示实施例1的车轮速度传感器的一部分的侧视图。
图4是图2的A-A截面概略图。
图5是针对实施例1的车轮速度传感器的一部分表示省略了树脂模制部的状态的立体图。
图6是针对实施例1的车轮速度传感器的一部分表示省略了树脂模制部及固定构件的状态的立体图。
图7是图6的状态的俯视图。
图8是与图6的状态的主视图一起表示与转子的对应关系的说明图。
图9是图7的B-B截面概略图。
图10(A)是表示转子向正方向旋转时的来自第一检测元件部及第二检测元件部的输出波形的波形图,图10(B)是表示转子向反方向旋转时的来自第一检测元件部及第二检测元件部的输出波形的波形图。
图11是表示实施例2的车轮速度传感器的立体图。
图12是表示实施例2的车轮速度传感器的一部分的俯视图。
图13是表示实施例2的车轮速度传感器的一部分的侧视图。
图14是图12的C-C截面概略图。
图15是针对实施例2的车轮速度传感器的一部分表示省略了树脂模制部的状态的立体图。
图16是针对实施例2的车轮速度传感器的一部分表示省略了树脂模制部及固定构件的状态的立体图。
图17是针对实施例2的车轮速度传感器的一部分表示省略了树脂模制部、固定构件和输出电线部的状态的俯视图。
图18是与图17的状态的主视图一起表示与转子的对应关系的说明图。
图19是图17的状态的侧视图。
图20是图19的D-D截面概略图。
图21是表示实施例3的车轮速度传感器的立体图。
图22是表示实施例3的车轮速度传感器的一部分的俯视图。
图23是图22的E-E截面概略图。
图24是与实施例3的车轮速度传感器的主视图一起表示与转子的对应关系的说明图。
图25是针对实施例3的车轮速度传感器的一部分表示省略了树脂模制部的状态的立体图。
图26是针对实施例3的车轮速度传感器的一部分表示省略了树脂模制部及固定构件的状态的立体图。
图27是针对实施例3的车轮速度传感器的第二传感器头部表示省略了树脂模制部的状态的俯视图。
图28是图27的状态的主视图。
图29是图28的F-F截面概略图。
标号说明
1、201、301…车轮速度传感器
3、203、303…固定构件
3A、203A、303A…插通孔部
5、205、305A、305B…树脂模制部
7、207…支架部
11、12…检测元件部
21A、21B、22A、22B、221A、221B、222A、222B…端子部
31A、31B、32A、32B、231A、231B、232A、232B…连接面
41、42、241、242、341、342…输出电线部
211…检测元件部(一个检测元件部)
212…检测元件部(其他检测元件部)
311…检测元件部(第一检测元件部)
312…检测元件部(第二检测元件部)
R…转子(被检测体)
Z…假想平面
具体实施方式
本发明的优选的方式如以下所示。
在本发明中,可以是,多个检测元件部配置在与被检测体的旋转轴正交的假想平面上。在本说明书中,旋转轴是指被检测体进行旋转运动时的成为其中心的固定的假想直线,假想平面是指与旋转轴正交的假想的平面中通过多个检测元件部中的每个检测元件部的平面。
根据该结构,在被检测体的旋转轴的方向上,能够抑制将多个检测元件部及固定构件一体化的部分的尺寸。
在本发明中,可以是,至少两个检测元件部在被检测体的周向上配置于不同的位置,且构成为在不同的定时产生脉冲。
若这样构成为至少两个检测元件部在不同的定时产生脉冲,则车轮向规定的旋转方向旋转时的脉冲的产生顺序与车轮向与该规定的旋转方向相反的方向旋转时的脉冲的产生顺序不同。即,成为能够确定车轮的旋转方向的结构。
在本发明中,可以是,多个检测元件部在与被检测体的旋转轴平行的方向上排列。
根据该结构,在与被检测体的旋转轴正交的方向上,能够抑制将多个检测元件部及固定构件一体化的部分的尺寸。
在本发明中,可以是,具有将多个检测元件部都包覆的树脂模制部。
若这样构成为多个检测元件部都埋设于树脂模制部内,则更容易使车轮速度传感器小型化。
在本发明中,可以是,检测元件部具备与输出电线部连接的端子部。
而且,在本发明中,可以是,具有支架部,该支架部保持多个检测元件部,并且确定与各个检测元件部对应的端子部的与输出电线部连接的连接面的朝向。
根据该结构,能够通过支架部一并保持多个检测元件部,能够使多个检测元件部的保持构造更加简化、小型化。此外,在各个端子部中能够稳定地确定连接面(与输出电线部连接的面)的朝向。
在本发明中,可以是,支架部构成为将设置于多个检测元件部中的一个检测元件部的端子部配置在与被检测体的旋转轴正交的规定方向的一侧,将设置于其他检测元件部的端子部配置在规定方向的另一侧。而且,支架部可以构成为,以使配置在规定方向的一侧的端子部的与输出电线部连接的连接面朝向规定方向的一侧并使配置在规定方向的另一侧的端子部的与输出电线部连接的连接面朝向规定方向的另一侧的形态,来保持多个检测元件部。
根据该结构,能够使规定方向的一侧的端子部和另一侧的端子部的连接面的朝向不同。由此,即使在将多个检测元件部更紧凑地配置而使端子部密集于更近的位置的结构中,也容易良好地进行端子部与输出电线部的接合。
在本发明中,可以是,固定构件具备供用于将该固定构件与车辆连结的连结构件插通的插通孔部,多个检测元件部中,第一检测元件部在被检测体的周向上配置在隔着插通孔部的一侧,第二检测元件部配置在隔着插通孔部的另一侧。
若这样在固定构件设置插通孔部(供用于与车辆连结的连结构件插通的孔部),并在其两侧配置第一检测元件部和第二检测元件部,则能够实现进一步的风险分散。例如,即使因飞石等而向任一方的检测元件部施加冲击,冲击的影响也难以波及到隔着插通孔部的相反侧的检测元件部,因此能够进一步降低两个检测元件部同时出现故障的可能性。
<实施例1>
以下,基于图1~图10来说明实施例1。
本实施例及本实施例以外的所有例子的车轮速度传感器例如能够作为防止制动时的车轮的抱死的防抱死制动系统的一部分而用于计测车轮的转速。
如图5所示,车轮速度传感器1具有:多个检测元件部11、12,检测由与车轮一起旋转的转子R(图3、图8)的旋转引起的磁场变动,并转换成电信号;多个输出电线部41、42,构成为与多个检测元件部11、12分别对应的输出路径,传送与各个检测元件部11、12的输出对应的信号;及固定构件3,构成为固定于车辆的构件,一体地保持多个检测元件部11、12。输出电线部41具体而言由两根输出电线部41A、41B构成,输出电线部42具体而言由两根输出电线部42A、42B构成。以下,详细叙述这些部件及其他部件。
在本结构中,将固定构件3的长度方向作为上下方向,将树脂模制部5的长度方向作为前后方向。并且,将与上下方向及前后方向正交的方向作为左右方向。需要说明的是,以下,以转子R的旋转轴的方向为前后方向且多个检测元件部11、12的排列方向为左右方向的结构为代表例来进行说明。关于前后方向,将配置检测元件部11、12的一侧作为前方,将配置线束40的一侧作为后方。关于上下方向,将配置树脂模制部5的一侧作为上侧,将配置插通孔部3A的一侧作为下侧。
如图3所示,车轮速度传感器1以与和可旋转地保持于车辆主体的车轮(图示省略)一体旋转的转子R对向的方式,相对于车辆主体不能相对移动地固定。车轮速度传感器1的配置只要是两个检测元件部11、12分别能够检测由转子R的旋转引起的磁变动的配置即可。例如,既可以是如图3中实线所示的转子R的例子那样将两个检测元件部11、12的前表面朝向转子R的板面(具体而言是板面的外缘部附近)配置的对向配置,也可以是如图3中双点划线假想表示的例子那样以与转子R2的外周面对向的方式配置两个检测元件部11、12的相对配置。以下,以图3、图8所示的转子R的例子为代表例来进行说明。
转子R相当于被检测体的一例,图3仅概略地图示出其一部分。该转子R例如呈环状或圆板状等形状,以厚度方向的旋转轴为中心而旋转。在转子R中,例如外周缘成为以旋转轴为中心的圆形状的外缘,S极磁性部RA与N极磁性部RB沿着该外周缘以相同尺寸交替排列。并且,在车轮通过车辆的行驶而进行了旋转的情况下,转子R与车轮一体地旋转,在转子R中,与检测元件部11对向的部分的磁性交替地切换成N极和S极,与检测元件部12对向的部分的磁性也交替地切换成N极和S极。需要说明的是,在图2~图4中,用箭头F1表示与转子R的旋转轴的方向平行的方向。
车轮速度传感器1具有图1~图3那样的外观,且具有图4那样的内部结构。如图4所示,车轮速度传感器1构成为主要包括产生检测信号的电气部件即检测单元10、保持检测单元10的部分即支架部7、作为覆盖检测单元10的罩的树脂模制部5、以及固定在未图示的车辆侧的固定构件3。在树脂模制部5的一端侧埋入检测元件部11、12,从树脂模制部5的另一端侧延伸出线束40。
如图5所示,检测单元10具备包含检测元件部11而成的第一检测单元10A和包含检测元件部12而成的第二检测单元10B。第一检测单元10A具有呈矩形形状且呈板状的检测元件部11、与该检测元件部11连接的两根端子部21A、21B(图7)、以及跨这两根端子部21A、21B而连接的大致长方体形状的电容器15A(图4)。第二检测单元10B具有呈矩形形状且呈板状的检测元件部12、与该检测元件部12连接的两根端子部22A、22B(图7)、以及跨这两根端子部22A、22B而连接的大致长方体形状的电容器15B(图8)。
图5、图6所示的检测元件部11、12分别构成为包含霍尔元件的霍尔IC,且都构成为将磁场变动转换成电信号而输出的元件部。检测元件部11、12都构成为大致板状,以使板厚方向成为前后方向的方式配置。而且,该检测元件部11、12位于与转子R的旋转轴正交的假想平面Z上,沿着转子R的周向排列。
图7所示的端子部21A、21B对应于图6所示的检测元件部11而设置,各自的一端侧与检测元件部11连接,各自的另一端侧与输出电线部41A、41B分别连接。如图4所示,端子部21B构成为板状的引线构件,靠近其一端(靠近前端)的部分构成为沿着上下方向而向下方侧延伸的下方延出部23B,并构成了以从该下方延出部23B折弯的方式相对于前后方向倾斜的倾斜延出部24B。端子部21A也是同样,构成为板状的引线构件,虽然未图示,但是靠近一端(靠近前端)的部分构成为与下方延出部23B大致平行地向下方侧延伸的下方延出部,并与倾斜延出部24B大致平行地构成了以从该下方延出部折弯的方式相对于前后方向倾斜的倾斜延出部24A(图7)。
并且,端子部21A、21B的两个下方延出部与检测元件部11连接,跨端子部21A、21B的两个倾斜延出部而设置电容器15A(图4)。如图4所示,电容器15A比端子部21A、21B向上方突出。如图7所示,在端子部21A、21B中,倾斜延出部24A、24B的各自的靠近后端部分的上表面构成为与输出电线部41A、41B连接的连接面31A、31B。连接面31A、31B是朝向上方侧和后方侧那样的斜向上的配置,输出电线部41A、41B分别通过钎焊等而连接于该连接面31A、31B。两根输出电线部41A、41B都是将作为导体的铜线、铝线或其他金属线捆扎多根而成的芯线44由乙烯系树脂、苯乙烯系树脂等具有电绝缘性的包覆构件46覆盖的构造,各个芯线44分别钎焊于端子部21A、21B。
图7所示的端子部22A、22B对应于图6所示的检测元件部12而设置,各自的一端侧与检测元件部12连接,各自的另一端侧与输出电线部42A、42B分别连接。如图9所示,端子部22B构成为板状的引线构件,其靠近一端(靠近前端)的部分构成为沿着上下方向而向下方侧延伸的下方延出部26B,并构成了以从该下方延出部26B折弯的方式相对于前后方向倾斜的倾斜延出部27B。端子部22A也是同样,构成为板状的引线构件,虽然未图示,但是靠近一端(靠近前端)的部分构成为与下方延出部26B大致平行地向下方侧延伸的下方延出部,并与倾斜延出部27B大致平行地构成了以从该下方延出部折弯的方式相对于前后方向倾斜的倾斜延出部27A(图7)。
并且,端子部22A、22B的两个下方延出部与检测元件部12连接,跨端子部22A、22B的两个倾斜延出部而设置电容器15B(图9)。电容器15B比端子部22A、22B向上方突出。如图7所示,在端子部22A、22B中,倾斜延出部27A、27B的各自的靠近后端部分的上表面构成为与输出电线部42A、42B连接的连接面32A、32B。连接面32A、32B成为朝向上方侧且后方侧的斜向上的配置,输出电线部42A、42B分别通过钎焊等而连接于该连接面32A、32B。两根输出电线部42A、42B与输出电线部41A、41B同样地构成,成为芯线44由包覆构件46覆盖的构造,各个芯线44分别钎焊于端子部22A、22B。
支架部7以如下方式发挥功能:保持多个检测元件部11、12,并且确定与检测元件部11对应的端子部21A、21B的连接面31A、31B(与输出电线部41A、41B连接的面)的朝向,确定与检测元件部12对应的端子部22A、22B的连接面32A、32B(与输出电线部42A、42B连接的面)的朝向。具体而言,支架部7在前端部配置检测元件部11、12,以使检测元件部11、12的各自的板面朝向前方侧的状态保持检测元件部11、12,将与检测元件部11连接的端子部21A、21B和与检测元件部12连接的端子部22A、22B保持为上述的配置状态。该支架部7由例如聚丙烯(PP)、聚酰胺(PA)等合成树脂形成。该支架部7例如通过在将检测单元10保持成规定的配置的状态下进行注射成形等而与检测单元10一体地形成。
如图4所示,树脂模制部5以覆盖上述的检测单元10和线束40的端部的方式配置,例如由聚丙烯(PP)、聚酰胺(PA)等合成树脂形成。具体而言,例如通过注射成形等而构成将检测单元10与支架部7一体化的成形体2,将输出电线部41A、41B、42A、42B接合于该成形体2之后,对于将上述成形体2与输出电线部41A、41B、42A、42B接合而成的构造体(图6、图7的结构)进行注射成形等,由此形成树脂模制部5。
具体而言,将成形体2与输出电线部41A、41B、42A、42B接合而成的构造体(图6、图7的结构)的一部分如图5那样维持成在固定构件3的贯通孔部3B中插通的状态,通过在该状态下进行注射成形等,来形成图4那样的树脂模制部5。通过这样的树脂模制部5,多个检测元件部11、12都被包覆,多个检测元件部11、12埋设于树脂模制部5内。
线束40是通过将图6、图7所示的四根输出电线部41A、41B、42A、42B捆扎并进行树脂包覆等而成为一根线的构件。对于该线束40,可以将构成输出电线部41的两根输出电线部41A、41B和构成输出电线部42的两根输出电线部42A、42B分别汇总并分别构成为铠装电线,也可以对四根输出电线部41A、41B、42A、42B一并进行树脂包覆。在图1等的例子中,成为利用橡胶管60将分别构成输出电线部41、42的两根铠装电线51、52汇总的方式。构成输出电线部41的铠装电线51与连接器71连接,构成输出电线部42的铠装电线51与连接器72连接。连接器71、72是用于与搭载于车辆的控制装置等连接的构件。
如图1、图4等所示,固定构件3构成为长条状且构成为板状,在长度方向的一侧形成有在板厚方向上贯通的孔部即插通孔部3A。另一方面,在长度方向的另一侧形成有在板厚方向上贯通的孔部即贯通孔部3B。插通孔部3A构成为将螺栓等连结构件插通的孔部,在内周部嵌入有C字形状的金属制的保持环3C。如图4所示,在贯通孔部3B内插通上述成形体2,贯通孔部3B的周边与成形体2由树脂模制部5进行固定而一体化。这样构成的固定构件3通过在插通孔部3A内插通且与车辆侧连结的螺栓而固定于车辆的合适部位。
在这样构成的车轮速度传感器1中,多个检测元件部11、12都配置在与转子R(被检测体)的旋转轴正交的规定的假想平面Z上。在图2~图4中,用双点划线概念性地表示该假想平面Z的位置。
具体而言,检测元件部11、12都检测S极与N极的磁场的切换,在检测元件部11的位置的磁场从S极切换为N极时输出一定电压以上的H电平信号,并维持该H电平信号直至从N极切换为S极为止。而且,在检测元件部11的位置的磁场从N极切换为S极时输出小于一定电压的L电平信号,并维持该L电平信号直至从S极切换为N极为止。从检测元件部11输出的H电平信号及L电平信号经由图7所示的端子部21A、21B向输出电线部41A、41B输出,在输出电线部41A、41B成为与信号对应的电位差。从检测元件部12输出的H电平信号及L电平信号经由图7所示的端子部22A、22B向输出电线部42A、42B输出,在输出电线部42A、42B成为与信号对应的电位差。
两个检测元件部11、12在转子R的周向上配置于不同的位置且构成为在不同的定时产生脉冲。例如,在转子R正向规定的正方向旋转的正转状态下,从检测元件部11、12输出的脉冲的波形成为图10(A)那,成为在从检测元件部12(第二检测元件部)输出了H电平信号之后从检测元件部11(第一检测元件部)输出H电平信号的输出顺序。具体而言,在从检测元件部12输出的H电平信号的上升定时之后,从检测元件部11输出的H电平信号的上升定时到来,然后,从检测元件部12输出的H电平信号的下降定时、从检测元件部11输出的H电平信号的下降定时依次到来。在本结构的车轮速度传感器1中,在以这样的顺序产生了各信号的情况下,能够判定为转子R的旋转方向即车轮的旋转方向是正方向。
另一方面,在转子R正向与上述正方向相反的反方向旋转的反转状态下,从检测元件部11、12输出的脉冲的波形成为图10(B)那样,成为在从检测元件部11(第一检测元件部)输出了H电平信号之后从检测元件部12(第二检测元件部)输出H电平信号的波形顺序。具体而言,在从检测元件部11输出的H电平信号的上升定时之后,从检测元件部12输出的H电平信号的上升定时到来,然后,从检测元件部11输出的H电平信号的下降定时、从检测元件部12输出的H电平信号的下降定时依次到来。在本结构的车轮速度传感器1中,在以这样的顺序产生了各信号的情况下,能够判定为转子R的旋转方向即车轮的旋转方向是反方向。即,根据本结构,能够进行转子R的旋转方向即车轮的旋转方向的正反判定。
如以上所述,在本结构中,设有能够检测由与车轮一起旋转的转子R(被检测体)的旋转引起的磁场变动的多个检测元件部11、12,并设有输出电线部41、42作为与该检测元件部11、12分别对应的输出路径。由此,能够利用多个系统来输出反映了车轮速度的检测信号。此外,设有固定构件3作为固定于车辆的构件,该固定构件3构成为一体地保持多个检测元件部11、12。根据该结构,与将多个车轮速度传感器分别安装于车辆来实现多路化的结构相比,能够抑制部件个数、安装工时、安装空间。
在本结构中,多个检测元件部11、12配置在与转子R(被检测体)的旋转轴正交的假想平面Z上。由此,在转子R(被检测体)的旋转轴的方向上,能够抑制多个检测元件部11、12及固定构件3一体化的部分的尺寸。
在本结构中,至少两个检测元件部11、12在转子R(被检测体)的周向上配置于不同的位置且构成为在不同的定时产生脉冲。由此,车轮向规定的旋转方向旋转时的脉冲的产生顺序与向该规定的旋转方向的反方向旋转时的脉冲的产生顺序不同。即,构成为能够确定车轮的旋转方向。
在本结构中,构成为树脂模制部5将多个检测元件部11、12都包覆。若这样构成为多个检测元件部11、12都埋设在树脂模制部5内,则更容易使车轮速度传感器小型化。
在本结构中,检测元件部11、12具备与输出电线部41、42连接的端子部21A、21B、22A、22B,支架部7保持多个检测元件部11、12,并且确定与检测元件部11、12分别对应的端子部的与输出电线部41、42连接的连接面31A、31B、32A、32B的朝向。根据该结构,能够通过支架部7一并保持多个检测元件部11、12,能够使多个检测元件部11、12的保持构造更加简化、小型化。此外,能够在端子部21A、21B、22A、22B分别稳定地确定连接面31A、31B、32A、32B(与输出电线部连接的面)的朝向。
<实施例2>
基于图11~图20来说明实施例2。需要说明的是,以下,关于与实施例1同样的结构的部分,标注与实施例1相同的标号并省略详细的说明。
实施例2的车轮速度传感器201具有图11~图13那样的外观,且具有图14那样的内部结构。需要说明的是,图14概略地示出图12的C-C截面,但是关于树脂模制部205的内部示出侧视图。如图14所示,车轮速度传感器201具有:多个检测元件部211、212,检测由与车轮一起旋转的转子R(图13、图18)的旋转引起的磁场变动,并转换为电信号;多个输出电线部41、42,构成为与多个检测元件部211、212分别对应的输出路径,传送与各个检测元件部211、212的输出对应的信号(图16);及固定构件203,构成为固定于车辆的构件,一体地保持多个检测元件部211、212。
在本结构中,将固定构件203的长度方向作为左右方向,将树脂模制部205的长度方向作为前后方向。并且,将与左右方向及前后方向正交的方向作为上下方向。以下,以转子R的旋转轴的方向为前后方向且多个检测元件部211、212的排列方向为前后方向的结构为代表例来进行说明。关于前后方向,将配置检测元件部211、212的一侧作为前方,将配置线束40的一侧作为后方。需要说明的是,图18示出以使车轮速度传感器201的左右方向(固定构件203的长度方向)成为转子R的旋转半径方向(图中上下方向)的方式安装的例子。
如图13所示,车轮速度传感器201以与和车轮一体旋转的转子R相对的方式,相对于车辆主体不能相对移动地固定。车轮速度传感器201的配置例如可以是如图13中实线所示的转子R的例子那样两个检测元件部211、212的重叠方向(前后方向)成为与转子R的旋转轴平行的方向的对向配置,也可以是如图13中双点划线假想表示的例子那样以与转子R2的外周面对向的方式配置两个检测元件部211、212,且两个检测元件部11、12在与转子R2的旋转轴正交的半径方向上排列的相对配置。以下,以图13、图18所示的转子R的例子为代表例来进行说明。需要说明的是,转子R本身的结构与实施例1相同。在图12~图14中,用箭头F1表示与转子R的旋转轴的方向平行的方向。
如图14所示,车轮速度传感器201构成为主要包括产生检测信号的电气部件即检测单元210、保持检测单元210的部分即支架部207、作为覆盖检测单元210的罩的树脂模制部205、以及固定在未图示的车辆侧的固定构件203。在树脂模制部205的一端侧埋入检测元件部211、212,从树脂模制部205的另一端侧延伸出线束40。
如图17所示,检测单元210具备包含检测元件部211而成的第一检测单元210A和包含检测元件部212而成的第二检测单元210B。如图18所示,第一检测单元210A具有呈矩形形状且呈板状的检测元件部211、与该检测元件部211连接的两根端子部221A、221B、以及跨这两根端子部221A、221B而连接的大致长方体形状的电容器215A。第二检测单元210B具有呈矩形形状且呈板状的检测元件部212、与该检测元件部212连接的两根端子部222A、222B、以及跨这两根端子部222A、222B而连接的大致长方体形状的电容器215B。
检测元件部211、212是与实施例1的检测元件部11、12同样的霍尔IC,分别与检测元件部11、12同样地发挥功能,都检测S极与N极的磁场的切换,在配置位置的磁场从S极切换为N极时输出一定电压以上的H电平信号,在从N极切换为S极时输出小于一定电压的L电平信号。检测元件部211、212都构成为大致板状,以板厚方向成为前后方向的方式配置。该检测元件部211、212在与转子R的旋转轴平行的方向(即前后方向)上排列。
如图17、图18所示,端子部221A、221B对应于检测元件部211而设置,各自的一端侧与检测元件部211连接,各自的另一端侧与输出电线部41A、41B(图16)分别连接。端子部221A构成为板状的引线构件,其靠近一端(靠近前端)的部分构成为在左右方向上延伸的左右延出部223A,以从该左右延出部223A的端部折弯的方式构成了在前后方向上延伸的前后延出部224A。端子部221B也是同样,构成为板状的引线构件,其靠近一端(靠近前端)的部分构成为与左右延出部223A大致平行地在左右方向上延伸的左右延出部223B,以从该左右延出部223B的端部折弯的方式构成了与前后延出部224A大致平行地在前后方向上延伸的前后延出部224B。
端子部221A、221B的两个左右延出部223A、223B与检测元件部211连接,跨两个前后延出部224A、224B而设置电容器215A。在端子部221A、221B中,前后延出部224A、224B的各自的靠近后端部分的侧面构成为与输出电线部41A、41B连接的连接面231A、231B(参照图17、图20)。连接面231A、231B是朝向左右方向一侧(与端子部222A、222B的连接面232A、232B相反的一侧)那样的面向横向的配置,输出电线部41A、41B的各自的芯线44分别钎焊于该连接面231A、231B。
如图17、图18所示,端子部222A、222B对应于检测元件部212而设置,各自的一端侧与检测元件部212连接,各自的另一端侧与输出电线部42A、42B(图16)分别连接。端子部222A构成为板状的引线构件,其靠近一端(靠近前端)的部分构成为在左右方向上延伸的左右延出部226A,以从该左右延出部226A的端部折弯的方式构成了在前后方向上延伸的前后延出部227A。端子部222B也是同样,构成为板状的引线构件,其靠近一端(靠近前端)的部分构成为与左右延出部226A大致平行地在左右方向上延伸的左右延出部226B,以从该左右延出部226B的端部折弯的方式构成了与前后延出部227A大致平行地在前后方向上延伸的前后延出部227B。
端子部222A、222B的两个左右延出部226A、226B与检测元件部212连接,跨两个前后延出部227A、227B而设置电容器215B。在端子部222A、222B中,前后延出部227A、227B的各自的靠近后端部分的侧面构成为与输出电线部41A、41B连接的连接面232A、232B(参照图17、图20)。连接面232A、232B是朝向左右方向另一侧(与连接面231A、231B相反的一侧)那样的面向横向的配置,输出电线部42A、42B的各自的芯线44分别钎焊于该连接面232A、232B。
图17~图20所示的支架部207以如下方式发挥功能:保持多个检测元件部211、212,并且确定与检测元件部211对应的端子部221A、221B的连接面231A、231B(与输出电线部41A、41B连接的面)的朝向,确定与检测元件部212对应的端子部222A、222B的连接面232A、232B(与输出电线部42A、42B连接的面)的朝向。支架部207在前端部配置检测元件部211、212,以将检测元件部211、212的各自的板面朝向前方侧的状态保持该检测元件部211、212,将与检测元件部211连接的端子部221A、221B和与检测元件部212连接的端子部222A、222B保持为上述的配置状态。支架部207例如由聚丙烯(PP)、聚酰胺(PA)等合成树脂形成。支架部207例如通过在将检测单元210保持为规定的配置的状态下进行注射成形等而与检测单元210一体地形成。
更具体而言,支架部207以将设置于检测元件部211(一个检测元件部)的端子部221A、221B配置在与转子R的旋转轴正交的规定方向(具体而言是左右方向)的一侧,并将设置于检测元件部212(其他检测元件部)的端子部222A、222B配置在规定方向(左右方向)的另一侧的状态保持端子部221A、221B和端子部222A、222B。而且,支架部207构成为以使配置于左右方向一侧的端子部221A、221B的连接面231A、231B(与输出电线部41A、41B连接的面)朝向左右方向一侧,并使配置于左右方向另一侧的端子部222A、222B的连接面232A、232B(与输出电线部42A、42B连接的面)朝向左右方向另一侧的形态,保持第一检测单元210A、第二检测单元210B。
如图14所示,树脂模制部205以覆盖上述的检测单元210和线束40的端部的方式配置,例如由聚丙烯(PP)、聚酰胺(PA)等合成树脂形成。具体而言,如图17~图20所示,例如通过注射成形等构成将检测单元210和支架部207一体化的成形体202,将输出电线部41A、41B、42A、42B接合于该成形体202之后,对于将上述的成形体202与输出电线部41A、41B、42A、42B接合而成的构造体(图16的结构)进行注射成形等,由此形成树脂模制部205。
具体而言,将成形体202与输出电线部41A、41B、42A、42B接合而成的构造体(图16的结构)的一部分如图15那样维持为在固定构件203的贯通孔部203B中插通的状态,通过在该状态下进行注射成形等,来形成图14那样的树脂模制部205。通过这样的树脂模制部205,多个检测元件部211、212都被包覆,多个检测元件部211、212埋设于树脂模制部205内。
线束40具有与实施例1同样的结构,例如如图16所示,将构成输出电线部41的两根输出电线部41A、41B和构成输出电线部42的两根输出电线部42A、42B分别汇总,分别构成为铠装电线51、52。需要说明的是,并不局限于该例子,也可以对四根输出电线部41A、41B、42A、42B一并进行树脂包覆。在该结构中,也成为用橡胶管60将分别构成输出电线部41、42的两根铠装电线51、52汇总的方式。
如图11、图14等所示,固定构件203构成为长条状和板状,在长度方向的一侧形成有在板厚方向上贯通的孔部即插通孔部203A,在其内周部嵌入有C字形状的金属制的保持环203C。另一方面,在长度方向的另一侧形成有在板厚方向上贯通的孔部即贯通孔部203B。如图14所示,在贯通孔部203B内插通上述的成形体202,贯通孔部203B的周边和成形体202由树脂模制部205进行固定而一体化。这样构成的固定构件203通过在插通孔部203A内插通且与车辆侧连结的螺栓而固定于车辆的合适部位。
在以上那样的本结构中,也能得到与实施例1同样的效果。
在本结构中,多个检测元件部211、212在与转子R(被检测体)的旋转轴平行的方向上排列,因此,在与转子R(被检测体)的旋转轴正交的方向上,能够抑制将多个检测元件部211、212及固定构件203一体化的部分的尺寸。
此外,根据本结构,能够在规定方向(左右方向)的一侧的端子部221A、221B和另一侧的端子部222A、222B中使连接面的朝向不同。由此,即使在将多个检测元件部211、212更紧凑地配置而使端子部221A、221B、222A、222B密集于更近的位置的结构中,也容易良好地进行端子部221A、221B、222A、222B与输出电线部41A、41B、42A、42B的接合。
<实施例3>
基于图21~图29来说明实施例3。需要说明的是,以下,关于与实施例1同样的结构的部分,标注与实施例1相同的标号并省略详细的说明。
实施例3的车轮速度传感器301具有图21、图22那样的外观,并具有图23那样的内部结构。车轮速度传感器301具有:多个检测元件部311、312,检测由与车轮一起旋转的转子R(图22、图24)的旋转引起的磁场变动,并转换成电信号;多个输出电线部41、42,构成为与多个检测元件部311、312分别对应的输出路径,传送与各个检测元件部311、312的输出对应的信号(图26);及固定构件303,构成为固定于车辆的构件,一体地保持多个检测元件部311、312。
检测元件部311、312是与实施例1的检测元件部11、12同样的霍尔IC,分别与检测元件部11、12同样地发挥功能,都检测S极与N极的磁场的切换,在配置位置的磁场从S极切换为N极时输出一定电压以上的H电平信号,在从N极切换为S极时输出小于一定电压的L电平信号。检测元件部311、312都构成为大致板状,以使板厚方向成为前后方向的方式配置。该检测元件部311、312都配置在与转子R的旋转轴正交的规定的假想平面Z上,沿着转子R的周向排列。
在本结构中,线束40也具有与实施例1同样的结构,例如如图26所示,将构成输出电线部41的两根输出电线部41A、41B和构成输出电线部42的两根输出电线部42A、42B分别汇总,分别构成为铠装电线51、52。在该结构中,也成为用橡胶管60将分别构成输出电线部41、42的两根铠装电线51、52汇总的方式。
在本结构中,将树脂模制部305A、305B的各自的长度方向作为前后方向,将多个检测元件部311、312的排列方向作为左右方向,将与前后方向及左右方向正交的方向作为上下方向。以下,以转子R的旋转轴的方向是前后方向的结构为代表例来进行说明。关于前后方向,将配置检测元件部311、312的一侧作为前方,将配置线束40的一侧作为后方。关于上下方向,将配置树脂模制部305A、305B的一侧作为下侧,将配置插通孔部303A的一侧作为上侧。
如图22所示,车轮速度传感器301以与和车轮一体旋转的转子R相对的方式,相对于车辆主体不能相对移动地固定。在图22、图24的例子中,成为使两个检测元件部311、312的前表面朝向转子R的板面(具体而言,板面的外缘部附近)而配置的对向配置。在图22、图23中,用箭头F1表示与转子R的旋转轴的方向平行的方向。
图21所示的车轮速度传感器301构成为主要包括产生检测信号的电气部件即两个检测单元310A、310B(图26)、保持各个检测单元310A、310B的部分即支架部307A、307B(图26)、作为将各个检测单元310A、310B覆盖的罩的树脂模制部305A、305B、以及固定在未图示的车辆侧的固定构件303。在树脂模制部305A的一端侧埋入图26所示的检测元件部311,从树脂模制部305A的另一端侧延伸出构成输出电线部41的铠装电线51。在树脂模制部305B的一端侧埋入图26所示的检测元件部312,从树脂模制部305B的另一端侧延伸出构成输出电线部42的铠装电线52。
在本结构中,通过树脂模制部305A将检测单元310A包覆的部分即第一传感器头部309A与通过树脂模制部305B将检测单元310B包覆的部分即第二传感器头部309B为相同构造。由此,以下重点说明第二传感器头部309B,而关于第一传感器头部309A,则认为与第二传感器头部309B构造相同而省略详细说明。
如图23所示,构成第二传感器头部309B的一部分的第二检测单元310B具有呈矩形形状且呈板状的检测元件部312、与该检测元件部312连接的两根端子部322A、322B(图27)、以及跨这两根端子部322A、322B而连接的大致长方体形状的电容器315B。端子部322A、322B对应于检测元件部312而设置,各自的一端侧与检测元件部312连接,各自的另一端侧与输出电线部42A、42B(图26)分别连接。端子部322A构成为板状的引线构件,其靠近一端(靠近前端)的部分构成为沿着上下方向而向下方侧延伸的下方延出部326A,以从该下方延出部326A折弯的方式构成了相对于前后方向倾斜的倾斜延出部327A。端子部322B也是同样,构成为板状的引线构件,靠近一端(靠近前端)的部分构成为与下方延出部326A大致平行地向下方侧延伸的下方延出部326B(图29),以从该下方延出部折弯的方式与倾斜延出部327A大致平行地构成了相对于前后方向倾斜的倾斜延出部327B(图27、图29)。
并且,端子部322A、322B的两个下方延出部与检测元件部312连接,跨端子部322A、322B的两个倾斜延出部而设置电容器315B。在端子部322A、322B中,倾斜延出部的各自的靠近后端部分的上表面构成为与输出电线部42A、42B连接的连接面。输出电线部42A、42B分别通过钎焊等而连接于端子部322A、322B的连接面。
图27~图29所示的支架部307B在前端部配置检测元件部312,以使检测元件部312的各自的板面朝向前方侧的状态保持该检测元件部312,将与检测元件部312连接的端子部322A、322B以连接面成为斜向上的配置进行保持。支架部307B例如由聚丙烯(PP)、聚酰胺(PA)等合成树脂形成,例如,在将检测单元310B(图29)保持为规定的配置的状态下通过进行注射成形等而与检测单元310B一体地形成。
如图23所示,树脂模制部305B以覆盖上述的检测单元310B和铠装电线52的端部的方式配置,例如由聚丙烯(PP)、聚酰胺(PA)等合成树脂形成。具体而言,首先,通过注射成形等构成将检测单元310B与支架部307B一体化的成形体302B(图27~图29),将输出电线部42A、42B接合于该成形体302B之后,对于将上述的成形体302B与输出电线部42A、42B接合而成的构造体(图26的结构)进行注射成形等,由此来形成树脂模制部305B。具体而言,将成形体302B与输出电线部42A、42B接合而成的构造体(图26的结构)的一部分如图25那样维持成在固定构件303的贯通孔部303C中插通的状态,通过在该状态下进行注射成形等,来形成图23那样的树脂模制部305B。
如图21、图24所示,固定构件303具备供用于将该固定构件303连结于车辆的连结构件(螺栓等)插通的插通孔部303A,在转子R的周向上,在隔着插通孔部303A的一侧配置检测元件部311(第一检测元件部),在隔着插通孔部303A的另一侧配置检测元件部312(第二检测元件部)。固定构件303构成为长条状和板状,在本结构中,转子R的周向成为固定构件303的长度方向。并且,在固定构件303的长度方向的中央部附近形成在板厚方向上贯通的孔部即插通孔部303A,在其内周部嵌入有C字形状的金属制的保持环303D。在固定构件303中,在以插通孔部303A为中心的长度方向一侧(周向一侧)形成有在板厚方向上贯通的孔部即贯通孔部303B,在长度方向另一侧形成有在板厚方向上贯通的孔部即贯通孔部303C。上述的成形体302B在贯通孔部303C内插通,贯通孔部303C的周边与成形体302B由树脂模制部305B进行固定而一体化。
通过树脂模制部305B包覆成形体302B而成的第二传感器头部309B以上述那样的结构固定于固定构件303。并且,第一传感器头部309A也具有与第二传感器头部309B同样的结构,并通过同样的方法以在贯通孔部303B中插通的方式固定于固定构件303。并且,该固定构件303通过在插通孔部303A内插通且与车辆侧连结的螺栓而固定于车辆的合适部位。
在本结构中,也如图10那样产生脉冲。即,两个检测元件部311、312在转子R的周向上配置于不同的位置且构成为在不同的定时产生脉冲。在转子R正向规定的正方向旋转的正转状态下,从检测元件部311、312输出的脉冲的波形成为图10(A)那样,在以这样的顺序产生了各信号的情况下,能够判定为转子R的旋转方向即车轮的旋转方向是正方向。另一方面,在转子R正向与上述正方向相反的反方向旋转的反转状态下,从检测元件部311、312输出的脉冲的波形成为图10(B)那样,在以这样的顺序产生了各信号的情况下,能够判定为转子R的旋转方向即车轮的旋转方向是反方向。这样,在本结构中,也能够进行转子R的旋转方向即车轮的旋转方向的正反判定。
在以上那样的本结构中,也能得到与实施例1同样的效果。
另外,若如本结构这样在固定构件303设置插通孔部303A(供用于与车辆连结的连结构件插通的孔部),并在其两侧配置检测元件部311(第一检测元件部)和检测元件部312(第二检测元件部),则能够实现进一步的风险分散。例如,即使因飞石等而向任一方的检测元件部施加冲击,冲击的影响也难以波及到隔着插通孔部303A的相反侧的检测元件部,因此能够进一步降低两个检测元件部311、312同时出现故障的可能性。
<其他的实施例>
以下,简单说明其他的实施例。
(1)在上述的实施例中,示出了检测元件部构成为包含霍尔元件的霍尔IC的例子,但也可以由磁阻元件等构成。
(2)在上述的实施例中,例示了与固定构件一体化的检测元件部为两个的情况,但是在任意的实施例中,与固定构件一体化的检测元件部都可以为三个以上。
- 车轮速度传感器的托架和车轮速度传感器
- 车轮速度传感器和车轮速度传感器的制造方法