一种电力巡检机器人机械臂
文献发布时间:2023-06-19 10:21:15
技术领域
本发明属于电力巡检自动化技术领域,具体涉及机械臂。
背景技术
巡检机器人一般由底盘,机械臂及载体组成,底盘用于行走,机械臂用于升降,载体用于拍照,或其他动作。通过各节机械臂之间机械臂传动的联动,由一个驱动电机控制机械臂升降。
目前的机械臂,存在意外掉电后无法找到起始点的缺陷。另外,在上位机程序出错的情况下,并不能够保护机械臂不会超出设定的运行范围。
发明内容
本发明所要解决的技术问题就是提供一种电力巡检机器人机械臂,意外掉电后可以找到起始点,在上位机程序出错的情况下,能够保护机械臂不会超出设定的运行范围。
为解决上述技术问题,本发明采用如下技术方案:一种电力巡检机器人机械臂,该机械臂包括第一节机械臂,第一节机械臂由驱动电机驱动旋转,且第一节机械臂的旋转轴上对应机械臂旋转到最高点位置设置有上限位传感器,对应机械臂旋转到最低点位置设置有下限位传感器,该机械臂的自检复位及防护方法包括如下步骤:
步骤S1:机械臂上电启动;
步骤S2:第一节机械臂逆时针转动,机械臂上升;
步骤S3:如果机械臂上升过程中触发到了上限位传感器,或者达到设置的角度α后,驱动电机开始反向转动,机械臂开始慢慢下降;
步骤S4:机械臂逐渐下降,最终会触发下限位传感器,此时机械臂会停止运动,且此时机械臂所处的位置即为设定的初始点,至此,机械臂的一次自检完成,处于待下发命令进行工作的状态。
优选的,所述上限位传感器和下限位传感器均为光电传感器,且对应设有感应光电传感器的光电感应片。
优选的,所述角度α为30度。
优选的,所述机械臂为四节联动式机械臂。
本发明采用的技术方案,具有如下有益效果:
1、通过机械臂上电自检程序,配合下、下光电限位传感器,实现了机械臂在任何状态在启动都能回到设定的起点。利用上、下光电限位传感器限制机械臂运行的最高点和最低点,在上位机程序出错的情况下,能够保护机械臂不会超出设定的运行范围。
2、在机械臂旋转轴上设计两个位置传感器,当机械臂旋转到最低点时,触发下限位传感器;当机械臂超过设定最高点时,触发上限位传感器,以达到保护机械臂不会因为上位机程序故障而超过设定点发生意外。
本发明的具体技术方案及其有益效果将会在下面的具体实施方式中结合附图进行详细的说明。
附图说明
下面结合附图和具体实施方式对本发明作进一步描述:
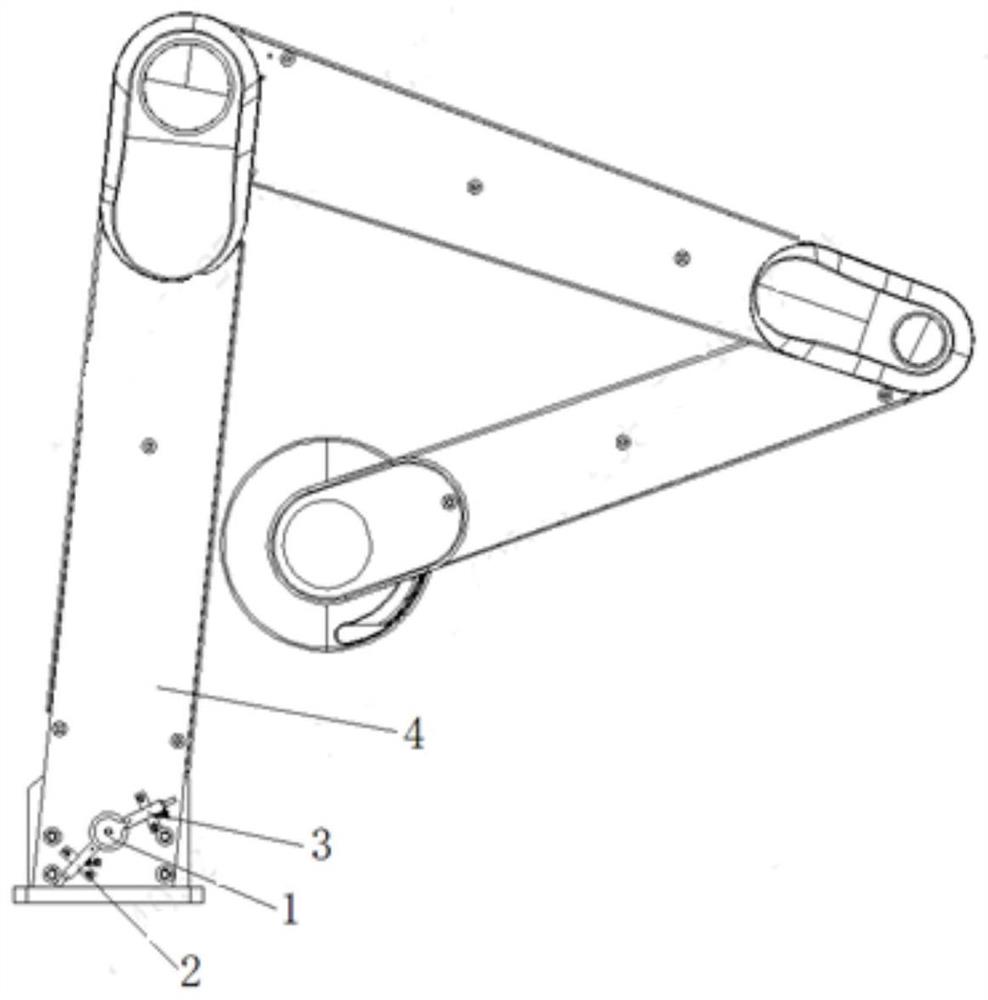
图1为本发明机械臂的结构示意图。
图2为本发明机械臂的自检复位及防护方法流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本领域技术人员可以理解的是,在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
如图1所示,一种电力巡检机器人机械臂4,该机械臂包括第一节机械臂,第一节机械臂由驱动电机驱动旋转,且第一节机械臂的旋转轴上对应机械臂旋转到最高点位置设置有上限位传感器2,对应机械臂旋转到最低点位置设置有下限位传感器3。在本实施例中,上限位传感器和下限位传感器均为光电传感器,即分别为上光电限位传感器和下光电限位传感器,且对应设有感应光电传感器的光电感应片1。
机械臂在运行到任意位置都可能出现意外断电的情况,这时就需要给设备重新上电启动机械臂。参考图2所示,通过以下步骤可以让机械臂重新回到初始位置,机械臂重新上电,自检程序启动。
参考图1所示方向,第一节机械臂开始逆时针转动,机械臂逐渐上升,如果上升过程中触发到了上限位光电传感器,则驱动电机会反向运动,机械臂开始慢慢下降;如果机械臂上升过程中始终没有触发上限位光电传感器,那么当第一节机械臂逆时针旋转达到设置的角度α后,驱动电机开始反向转动,机械臂开始慢慢下降;机械臂逐渐下降,最终会触发下光电限位传感器,此时机械臂会停止运动,此刻机械臂所处的位置即为我们设定的初始点,至此,机械臂的一次自检完成,处于待下发命令进行工作的状态。
可以选择的,所述角度α为30度,当然,可以理解,也可以是其他角度。
在本实施例中,所述机械臂为四节联动式机械臂。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
- 一种具有线束伸缩结构的电力巡检机器人机械臂
- 一种机器人机械臂位置反馈机构、机器人机械臂及机器人