四电机驱动的垂直升降及垂头仰卧结构及方法
文献发布时间:2023-06-19 10:29:05
技术领域
本发明属于医疗器械领域,更具体地,涉及一种四电机驱动的垂直升降及垂头仰卧结构及方法。
背景技术
急救床和护理床都可以分为电动床及手动床,是急救病人需要急救时使用的病床,或者行动不方便的病人在住院或居家护理时使用的病床。其主要目的是便于护理人员进行照顾,便于病人康复。目前,内科急救使用的急救床为结构和功能单一的普通床,大多只具备升降功能,不能满足内科急救和护理的需求,因此有必要改进。
发明内容
本发明的目的在于提供一种四电机驱动的垂直升降及垂头仰卧结构及方法,本发明采用连杆结构,同时实现了垂直升降及垂头仰卧的功能,配合单边双驱动电机的设计,大大的增加了其承载能力。
为实现上述目的,本发明所采取的技术方案是:
一种四电机驱动的垂直升降及垂头仰卧结构,其特征在于:包括底座100和位于底座100上方的活动框架101,活动框架101与底座100之间通过头部连杆机构和腿部连杆机构连接,头部连杆机构和腿部连杆机构分别支撑活动框架101的前后两端;
所述腿部连杆机构包括一对腿部直线驱动器105和一根第一联动杆108,所述第一联动杆108的两端均通过支撑连接件103安装在活动框架101上,第一联动杆108与支撑连接件103转动连接;所述第一联动杆108的两端均设有一个第一力臂106和一个第二力臂107,所述第一力臂106的支点端和第二力臂107的支点端均与第一联动杆108固定连接,并且护成一定角度;所述第二力臂107的活动端与底座100转动连接;一对腿部直线驱动器105的尾端转动连接在活动框架101上,头端与对应的第一力臂106的活动端转动连接;
所述头部连杆机构包括一对头部直线驱动器104、一根第一联动杆108和一根第二联动杆110,所述第一联动杆108的两端均通过支撑连接件103安装在活动框架101上,第一联动杆108与支撑连接件103转动连接;所述第一联动杆108的两端均设有一个第一力臂106和一个第二力臂107,所述第一力臂106的支点端和第二力臂107的支点端均与第一联动杆108固定连接,并且护成一定角度;一对腿部直线驱动器105的尾端转动连接在活动框架101上,头端与对应的第一力臂106的活动端转动连接;所述第二联动杆110的两端均设有第三力臂109,所述第三力臂109的中部与第二联动杆110固定连接,上端与第二力臂107的活动端转动连接,下端与底座100转动连接。
优选地,所述底座100和活动框架101均为矩形框架结构,所述底座100的四个角处各设有一个万向轮102。
优选地,所述活动框架101的中部设有横梁,所述头部直线驱动器104和腿部直线驱动器105的尾部均与所述横梁转动连接。
优选地,所述活动框架101的两侧各设有三个以上的连接支座111,每个连接支座111的顶部均设有螺栓孔,用于通过螺栓与床板连接。
优选地,所述活动框架101头部端设有靠背连接支架112,所述靠背连接支架112的中部设有承插套管115,承插套管115的两侧各设有一个承插孔114,用于与靠背承插连接。
优选地,所述靠背连接支架112的两端各设有一块耳板113,所述耳板113上设有螺栓孔,用于通过螺栓与靠背连接,完成多靠背的锁定。
优选地,所述第一力臂106和第二力臂107之间的夹角大于等于30°,小于等于150°。
优选地,所述第一力臂106和第二力臂107之间的夹角等于90°。
优选地,所述头部直线驱动器104和腿部直线驱动器105均为电动推杆。
一种四电机驱动的垂直升降及垂头仰卧结构的控制方法,其特征在于,包括
垂直升降功能控制:
活动框架101整体上升时,控制头部直线驱动器104和腿部直线驱动器105同步伸出,推动第一力臂106使第二力臂107和第三力臂109转动,当头部直线驱动器104和腿部直线驱动器105伸出到最长状态时,活动框架101整体上升至最高点;
当活动框架101位于最高状态需要整体下降时,控制头部直线驱动器104和腿部直线驱动器105同步向内缩进,拉住第一力臂106使第二力臂107和第三力臂109转动,当头部直线驱动器104和腿部直线驱动器105缩到最短状态时,活动框架101整体下降至最底点;
垂头仰卧功能控制:
当活动框架101位于最高状态,单控制头部直线驱动器104向内缩进,拉住对应的第一力臂106使对应的第二力臂107和第三力臂109转动,活动框架101向头部直线驱动器104一端倾斜,当头部直线驱动器104缩到最短状态时,活动框架101形成垂头仰卧状态;
当活动框架101位于最高状态,单控制腿部直线驱动器105向内缩进,拉住对应的第一力臂106使对应的第二力臂107转动,活动框架101向腿部直线驱动器105一端倾斜,当腿部直线驱动器105缩到最短状态时,活动框架101形成逆垂头仰卧状态。
本发明的有益效果:本发明采用双边独立的连杆结构,分别或同时驱动一边的连杆结构,分别实现垂直升降及垂头仰卧的功能,配合单边双驱动电机的设计,大大的增加了其承载能力。
附图说明
图1为四电机驱动的垂直升降及垂头仰卧结构的立体示意图。
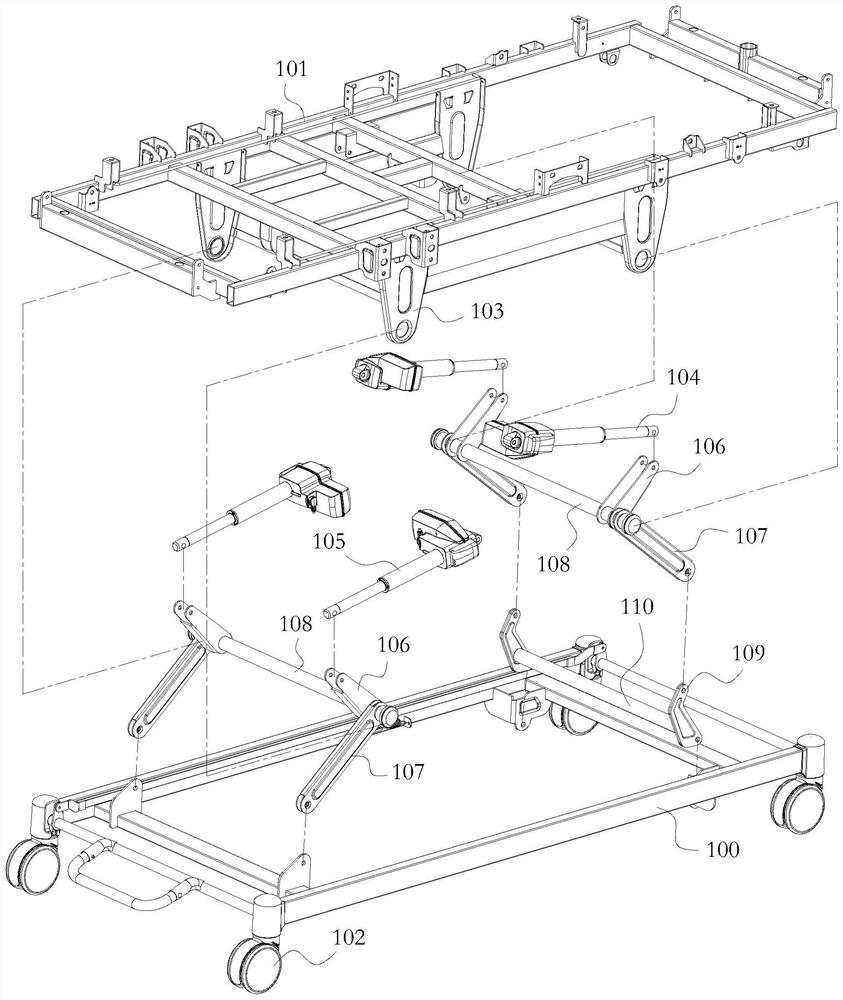
图2为四电机驱动的垂直升降及垂头仰卧结构的分解示意图。
图3为四电机驱动的垂直升降及垂头仰卧结构降到最低状态的示意图。
图4为四电机驱动的垂直升降及垂头仰卧结构升到最高状态的示意图。
图5为四电机驱动的垂直升降及垂头仰卧结构垂头仰卧状态(头侧倾斜)示意图。
图6为四电机驱动的垂直升降及垂头仰卧结构逆垂头仰卧状态(脚侧倾斜)示意图。
图7为活动框架的立体示意图。
图中:底座100,活动框架101,万向轮102,支撑连接件103,头部直线驱动器104,腿部直线驱动器105,第一力臂106,第二力臂107,第一联动杆108,第三力臂109,第二联动杆110,连接支座111,靠背连接支架112,耳板113,承插孔114,承插套管115。
具体实施方式
下面将结合具体实施例对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1、2,一种四电机驱动的垂直升降及垂头仰卧结构,其特征在于:包括底座100和位于底座100上方的活动框架101,活动框架101与底座100之间通过头部连杆机构和腿部连杆机构连接,头部连杆机构和腿部连杆机构分别支撑活动框架101的前后两端。
所述腿部连杆机构包括一对腿部直线驱动器105和一根第一联动杆108,所述第一联动杆108的两端均通过支撑连接件103安装在活动框架101上,第一联动杆108与支撑连接件103转动连接;所述第一联动杆108的两端均设有一个第一力臂106和一个第二力臂107,所述第一力臂106的支点端和第二力臂107的支点端均与第一联动杆108固定连接(第一力臂106和第二力臂107两端分别为支点端和活动端),并且护成一定角度;所述第二力臂107的活动端与底座100转动连接;一对腿部直线驱动器105的尾端转动连接在活动框架101上,头端与对应的第一力臂106的活动端转动连接。
所述头部连杆机构包括一对头部直线驱动器104、一根第一联动杆108和一根第二联动杆110,所述第一联动杆108的两端均通过支撑连接件103安装在活动框架101上,第一联动杆108与支撑连接件103转动连接;所述第一联动杆108的两端均设有一个第一力臂106和一个第二力臂107,所述第一力臂106的支点端和第二力臂107的支点端均与第一联动杆108固定连接(第一力臂106和第二力臂107两端分别为固定连接的支点端和转动连接的活动端),并且护成一定角度;一对腿部直线驱动器105的尾端转动连接在活动框架101上,头端与对应的第一力臂106的活动端转动连接;所述第二联动杆110的两端均设有第三力臂109,所述第三力臂109的中部与第二联动杆110固定连接,上端与第二力臂107的活动端转动连接,下端与底座100转动连接。
如图2,所述头部直线驱动器104和腿部直线驱动器105均为电动推杆。
如图2,所述第一力臂106和第二力臂107之间的夹角大于等于30°,小于等于150°,综合转动力矩和升降范围比较合理的角度为90°。
如图1、2、7,所述底座100和活动框架101均为矩形框架结构,所述底座100的四个角处各设有一个万向轮102,用于整体的行走。所述活动框架101的中部设有横梁,一是用于加强整体结构的强度,二是用来给所述头部直线驱动器104和腿部直线驱动器105的尾部一个铰接位。所述活动框架101的两侧各设有三个以上的连接支座111,每个连接支座111的顶部均设有螺栓孔,用于通过螺栓与床板连接。所述活动框架101头部端设有靠背连接支架112,所述靠背连接支架112的中部设有承插套管115,承插套管115的两侧各设有一个承插孔114,用于与靠背承插连接;所述靠背连接支架112的两端各设有一块耳板113,所述耳板113上设有螺栓孔,用于通过螺栓与靠背连接,完成多靠背的锁定;安装靠背时,靠背上对应的承插杆插入对应的承插套管115和承插孔114内,再通过两侧的耳板113用螺栓与靠背的背楞连接,使靠背无法拔出。
上述四电机驱动的垂直升降及垂头仰卧结构中两个头部直线驱动器104和两个腿部直线驱动器105均由一个遥控器控制,遥控器包括上升键、下降键、垂头仰卧键和按逆垂头仰卧键等功能按键。其各种功能的控制方法包括垂直升降功能控制和垂头仰卧功能控制,其中
垂直升降功能控制:
活动框架101整体上升时,按整床上升键时,控制头部直线驱动器104和腿部直线驱动器105同步伸出,推动第一力臂106使第二力臂107和第三力臂109转动,当头部直线驱动器104和腿部直线驱动器105伸出到最长状态时,活动框架101整体上升至最高点。
当活动框架101位于最高状态需要整体下降时,按整床下降键,控制头部直线驱动器104和腿部直线驱动器105同步向内缩进,拉住第一力臂106使第二力臂107和第三力臂109转动,当头部直线驱动器104和腿部直线驱动器105缩到最短状态时,活动框架101整体下降至最底点。
垂头仰卧功能控制:
当活动框架101位于最高状态,按垂头仰卧键,单控制头部直线驱动器104向内缩进,拉住对应的第一力臂106使对应的第二力臂107和第三力臂109转动,活动框架101向头部直线驱动器104一端倾斜,当头部直线驱动器104缩到最短状态时,活动框架101形成垂头仰卧状态。
当活动框架101位于最高状态,按逆垂头仰卧键,单控制腿部直线驱动器105向内缩进,拉住对应的第一力臂106使对应的第二力臂107转动,活动框架101向腿部直线驱动器105一端倾斜,当腿部直线驱动器105缩到最短状态时,活动框架101形成逆垂头仰卧状态。
本发明采用双边独立的连杆结构,通过同时驱动两边的连杆结构,实现垂直升降功能;也可以分别控制一边的连杆结构,实现垂头仰卧的功能。并且配合单边双驱动电机(电动推杆是用电机驱动的)的设计,配合合理的夹角以及各个部件强度的增加,大大的增加了其承载能力;如果是一边使用单电机驱动,一个第一力臂106驱动第一联动杆108旋转,会使得第一联动杆108受力不均,产生力的损失,有限承载只能达到170kg,而且第一联动杆108长期受到不均的力也容易损坏;使用双电机对称布置后,通过两个第一力臂106对称布置,驱动第一联动杆108两端使其旋转,使得第一联动杆108受力均匀,不会产生偏转,避免的力的损失,再结合连杆机构合理的夹角以及各个部件强度的增加,可以使得承载力产生1+1大于2的效果,达到500kg,大大的增加了其承载能力。
以上说明仅为本发明的应用实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等效变化,仍属本发明的保护范围。
- 四电机驱动的垂直升降及垂头仰卧结构及方法
- 四电机驱动的垂直升降及垂头仰卧结构