应用信号处理的计算机控制平台
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及计算机系统领域,尤其涉及一种应用信号处理的计算机控制平台。
背景技术
计算机控制系统(Computer Control System,简称CCS)是应用计算机参与控制并借助一些辅助部件与被控对象相联系,以获得一定控制目的而构成的系统。这里的计算机通常指数字计算机,可以有各种规模,如从微型到大型的通用或专用计算机。辅助部件主要指输入输出接口、检测装置和执行装置等。与被控对象的联系和部件间的联系,可以是有线方式,如通过电缆的模拟信号或数字信号进行联系;也可以是无线方式,如用红外线、微波、无线电波、光波等进行联系。
计算机把通过测量元件、变送单元和模数转换器送来的数字信号,直接反馈到输入端与设定值进行比较,然后根据要求按偏差进行运算,所得到数字量输出信号经过数模转换器送到执行机构,对被控对象进行控制,使被控变量稳定在设定值上。这种系统称为闭环控制系统。
目前,船锚一旦安装到船体上,则一般不会拆卸而被船体永久使用,这样会带来两处弊端,一方面,价格较贵的船锚无法重复利用,导致船体的运营成本增加,另一方面,固定式的安装方式不方便对船锚进行智能化改造和升级,降低了整船控制的智能化水准。
发明内容
为了解决现有技术中的技术问题,本发明提供了一种应用信号处理的计算机控制平台,在采用定制的包括锚链、锚链释放电机和锚体的可拆卸船锚结构以应用于不同船体的基础上,基于可拆卸船锚当前安装的船体的底部面积决定卧底锚链长度以及还要释放的锚链的长度,从而对较大尺寸的船型提供较长的卧底锚链长度以保持抛锚后的船体的稳定性。
为此,本发明至少需要具备以下几处重要的发明点:
(1)采用包括锚链、锚链释放电机和锚体的可拆卸船锚结构以通过拆卸模式用于各种船型,从而提升船锚的应用兼容性;
(2)基于可拆卸船锚当前安装的船体的底部面积决定卧底锚链长度以及还要释放的锚链的长度,从而满足不同尺寸船型对卧底锚链长度的不同需求。
根据本发明的一方面,提供了一种应用信号处理的计算机控制平台,所述平台包括:
可拆卸船锚结构,通过拆卸模式能够用于各种船型,包括锚链、锚链释放电机和锚体;
其中,所述锚链释放电机设置在可拆卸船锚结构被安装的船体上,与锚链连接,用于基于接收到的继续释放长度决定继续释放的锚链的长度。
更具体地,在所述应用信号处理的计算机控制平台中:
所述锚链的一端与所述锚链释放电机连接,另一端维系在所述锚体上。
更具体地,在所述应用信号处理的计算机控制平台中,所述平台还包括:
参数测量机构,设置在所述锚体的顶部,用于在所述锚体下沉时,对所述锚体当前承受的水压进行测量,进而计算与所述水印成正相关的关系的下沉高度。
所述应用信号处理的计算机控制平台中还可以包括:
数据切换设备,与所述参数测量机构连接,用于将可拆卸船锚结构被安装的船体当前所在位置的海底深度减去所述下沉高度以获得距离海底的参考距离,并在所述参考距离低于等于预设距离阈值时,发出捕获执行命令;
所述数据切换设备还用于在所述参考距离高于所述预设距离阈值时,发出捕获中断命令;
锚顶摄像机构,位于所述参数测量机构的附近,与所述数据切换设备连接,用于在接收到所述捕获执行命令时,面对所述锚体的上方执行实时摄像操作,以获得实时上方图像;
亮度辨识设备,设置在所述锚体的内部,与所述锚顶摄像机构连接,用于将所述实时上方图像中亮度值在预设船底亮度范围内的像素点作为有效像素点;
内容检测机构,与所述亮度辨识设备连接,用于将所述锚顶摄像机构中的每一个有效像素点执行以下动作:当以所述锚顶摄像机构中的每一个有效像素点为中心的预设尺寸的像素点窗口内不存在其他有效像素点时,将所述有效像素点作为可靠像素点;
信号提取设备,分别与所述内容检测机构和所述参数测量机构连接,用于接收所述下沉高度和所述实时上方图像中可靠像素点的数量,并基于所述下沉高度和所述实时上方图像中可靠像素点的数量估算可拆卸船锚结构被安装的船体的底部面积;
长度解析机构,由设置在所述船体内的计算机来实现,分别与所述信号提取设备和所述锚链释放电机连接,用于确定与所述船体的底部面积成正比的卧底锚链长度,将所述卧底锚链长度与被安装的船体当前所在位置的海底深度之和减去所述下沉高度以获得继续释放长度,并将所述继续释放长度发送给所述锚链释放电机;
其中,基于所述下沉高度和所述实时上方图像中可靠像素点的数量估算可拆卸船锚结构被安装的船体的底部面积包括:在所述实时上方图像中可靠像素点的数量不变时,所述下沉高度越深,估算的可拆卸船锚结构被安装的船体的底部面积越大;
其中,基于所述下沉高度和所述实时上方图像中可靠像素点的数量估算可拆卸船锚结构被安装的船体的底部面积还包括:在所述下沉高度不变时,所述实时上方图像中可靠像素点的数量越多,估算的可拆卸船锚结构被安装的船体的底部面积越大。
根据本发明的另一方面,还提供了一种应用信号处理的计算机控制方法,所述方法包括使用一种如上述的应用信号处理的计算机控制平台,用于采用可拆卸的船锚结构基于应用的不同尺寸的船体决定保持的卧底锚链长度从而满足不同船型对船锚的定制需求。
本发明的应用信号处理的计算机控制平台结构紧凑、应用广泛。由于能够基于定制的可拆卸船锚当前安装的船体的底部面积决定卧底锚链长度以及还要释放的锚链的长度,从而对较大尺寸的船型提供较长的卧底锚链长度以保持抛锚后的船体的稳定性。
附图说明
以下将结合附图对本发明的实施方案进行描述,其中:
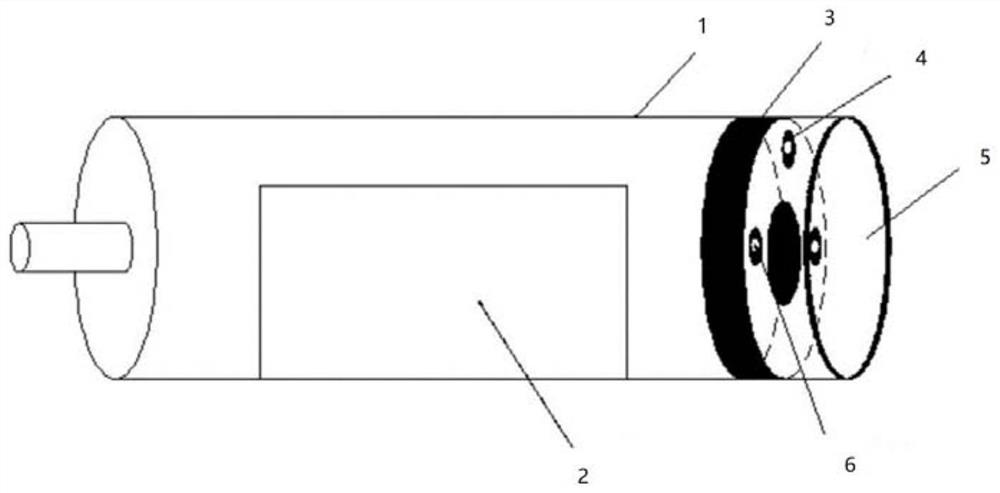
图1为根据本发明实施方案示出的应用信号处理的计算机控制平台的锚顶摄像机构的外形结构图。
具体实施方式
下面将参照附图对本发明的应用信号处理的计算机控制平台的实施方案进行详细说明。
信号处理指的是在事件变化过程中抽取特征信号,经去干扰、分析、综合、变换和运算等的处理,从而得到反映事件变化本质或处理者感兴趣的信息的过程。信号处理可以分为模拟信号处理和数字信号处理。数字信号处理是20世纪60年代才开始发展起来的,开始是贝尔实验室及麻省理工学院用电子计算机对电路与滤波器设计进行仿真,奠定了数字滤波器的发展基础。60年代中期,发明了快速傅里叶变换,使频谱分析的傅里叶分析的计算速度提高了百倍以上,从而达到了可以利用电子计算机进行谱分析的目的,奠定了信号与系统分析的实用基础,形成了以数字滤波及快速傅里叶变换为中心内容的数字信号处理的基本方法与概念。70年代开始,数字信号处理这个专用名词在科技领域问世。
目前,船锚一旦安装到船体上,则一般不会拆卸而被船体永久使用,这样会带来两处弊端,一方面,价格较贵的船锚无法重复利用,导致船体的运营成本增加,另一方面,固定式的安装方式不方便对船锚进行智能化改造和升级,降低了整船控制的智能化水准。
为了克服上述不足,本发明搭建了一种应用信号处理的计算机控制平台,能够有效解决相应的技术问题。
根据本发明实施方案示出的应用信号处理的计算机控制平台包括:
可拆卸船锚结构,通过拆卸模式能够用于各种船型,包括锚链、锚链释放电机和锚体;
其中,所述锚链释放电机设置在可拆卸船锚结构被安装的船体上,与锚链连接,用于基于接收到的继续释放长度决定继续释放的锚链的长度。
接着,继续对本发明的应用信号处理的计算机控制平台的具体结构进行进一步的说明。
所述应用信号处理的计算机控制平台中:
所述锚链的一端与所述锚链释放电机连接,另一端维系在所述锚体上。
所述应用信号处理的计算机控制平台中还可以包括:
参数测量机构,设置在所述锚体的顶部,用于在所述锚体下沉时,对所述锚体当前承受的水压进行测量,进而计算与所述水印成正相关的关系的下沉高度。
所述应用信号处理的计算机控制平台中还可以包括:
数据切换设备,与所述参数测量机构连接,用于将可拆卸船锚结构被安装的船体当前所在位置的海底深度减去所述下沉高度以获得距离海底的参考距离,并在所述参考距离低于等于预设距离阈值时,发出捕获执行命令;
所述数据切换设备还用于在所述参考距离高于所述预设距离阈值时,发出捕获中断命令;
锚顶摄像机构,位于所述参数测量机构的附近,与所述数据切换设备连接,用于在接收到所述捕获执行命令时,面对所述锚体的上方执行实时摄像操作,以获得实时上方图像;
如图1所示,在所述锚顶摄像机构中,1为外壳,2为封装开口,3为镜头,4、6为光源阵列中的两个示例性光源,5为防水层;
亮度辨识设备,设置在所述锚体的内部,与所述锚顶摄像机构连接,用于将所述实时上方图像中亮度值在预设船底亮度范围内的像素点作为有效像素点;
内容检测机构,与所述亮度辨识设备连接,用于将所述锚顶摄像机构中的每一个有效像素点执行以下动作:当以所述锚顶摄像机构中的每一个有效像素点为中心的预设尺寸的像素点窗口内不存在其他有效像素点时,将所述有效像素点作为可靠像素点;
信号提取设备,分别与所述内容检测机构和所述参数测量机构连接,用于接收所述下沉高度和所述实时上方图像中可靠像素点的数量,并基于所述下沉高度和所述实时上方图像中可靠像素点的数量估算可拆卸船锚结构被安装的船体的底部面积;
长度解析机构,由设置在所述船体内的计算机来实现,分别与所述信号提取设备和所述锚链释放电机连接,用于确定与所述船体的底部面积成正比的卧底锚链长度,将所述卧底锚链长度与被安装的船体当前所在位置的海底深度之和减去所述下沉高度以获得继续释放长度,并将所述继续释放长度发送给所述锚链释放电机;
其中,基于所述下沉高度和所述实时上方图像中可靠像素点的数量估算可拆卸船锚结构被安装的船体的底部面积包括:在所述实时上方图像中可靠像素点的数量不变时,所述下沉高度越深,估算的可拆卸船锚结构被安装的船体的底部面积越大;
其中,基于所述下沉高度和所述实时上方图像中可靠像素点的数量估算可拆卸船锚结构被安装的船体的底部面积还包括:在所述下沉高度不变时,所述实时上方图像中可靠像素点的数量越多,估算的可拆卸船锚结构被安装的船体的底部面积越大。
所述应用信号处理的计算机控制平台中:
所述亮度辨识设备还用于将所述实时上方图像中亮度值不在所述预设船底亮度范围内的像素点作为无效像素点。
所述应用信号处理的计算机控制平台中:
所述锚顶摄像机构还用于在接收到所述捕获中断命令时,停止面对所述锚体的上方执行的实时摄像操作。
所述应用信号处理的计算机控制平台中还可以包括:
数据缓存芯片,分别与所述内容检测机构和所述信号提取设备连接,用于为所述内容检测机构以及所述信号提取设备提供数据缓存服务;
其中,所述数据缓存芯片内置数据监测单元,用于分别与所述内容检测机构和所述信号提取设备连接。
所述应用信号处理的计算机控制平台中:
所述数据缓存芯片用于同时获取所述内容检测机构的当前运算数据量以及所述信号提取设备的当前运算数据量;
其中,所述数据缓存芯片还用于在所述内容检测机构的当前运算数据量与所述信号提取设备的当前运算数据量之和大于等于预设数据量阈值时,从省电模式进入运行模式。
所述应用信号处理的计算机控制平台中:
所述数据缓存芯片还用于在所述内容检测机构的当前运算数据量与所述信号提取设备的当前运算数据量之和小于所述预设数据量阈值时,从运行模式进入省电模式。
同时,为了克服上述不足,本发明还搭建了一种应用信号处理的计算机控制方法,所述方法包括使用一种如上述的应用信号处理的计算机控制平台,用于采用可拆卸的船锚结构基于应用的不同尺寸的船体决定保持的卧底锚链长度从而满足不同船型对船锚的定制需求。
另外,在所述应用信号处理的计算机控制平台中,可以采用DDR存储设备来实现所述数据缓存芯片。DDR=Double Data Rate双倍速率同步动态随机存储器。严格的说DDR应该叫DDR SDRAM,人们习惯称为DDR,其中,SDRAM是Synchronous Dynamic Random AccessMemory的缩写,即同步动态随机存取存储器。而DDR SDRAM是Double Data Rate SDRAM的缩写,是双倍速率同步动态随机存储器的意思。DDR内存是在SDRAM内存基础上发展而来的,仍然沿用SDRAM生产体系,因此对于内存厂商而言,只需对制造普通SDRAM的设备稍加改进,即可实现DDR内存的生产,可有效的降低成本。Double Data Rate:与传统的单数据速率相比,DDR技术实现了一个时钟周期内进行两次读/写操作,即在时钟的上升沿和下降沿分别执行一次读/写操作。
以上所述仅为本发明的优选实施例,凡依本发明权利要求所做的均等变化与修饰,都应属本发明的涵盖范围。
- 应用信号处理的计算机控制平台
- 一种移动ERP应用开发平台计算机控制结构