一种铸管砂芯机器人通用夹具
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及工业自动化领域,具体是一种铸管砂芯机器人通用夹具。
背景技术
离心球磨铸铁管,以下简称铸管,在城建输水、输气等工程上得到了广泛的应用,铸管砂芯的质量与铸管承口成形质量息息相关,铸管砂芯表面不能有粘砂、毛刺及不平整表面等制造缺陷。由于铸管规格较多,砂芯的类别也大小不一,导致砂芯在制造过程中,砂芯的自动化取料难度增加。
砂芯的间歇式小批量生产多采用手工下料修磨,工人工作强度大、工作环境差,生产效率低。因此,对于连续式批量生产的制芯机,采用机械设备进行自动化上下料成为了提高砂芯生产效率的关键。为了解决上述问题,本发明提出一种铸管砂芯机器人通用夹具,用来实现砂芯的自动化上下料,显著提高了砂芯的生产效率,降低了劳动强度。
发明内容
为了解决上述问题,本发明提出一种铸管砂芯机器人通用夹具。
一种铸管砂芯机器人通用夹具,包括:
快换连接装置,与工业机器人通用夹具的上部连接,用于实现夹具的连接;
左右调整装置,与快换连接装置连接,实现夹具的横向调节,自动调整间距;
旋转装置,在左右调整装置均布有若干组,使得砂芯能够在夹具上独立连续旋转,将砂芯表面残余的涂料分离出去;
砂芯抓取装置,每组左右调整装置上均有设置,实现砂芯的自动抓取。
所述的快换连接装置包括安装在工业机器人末端的快换接头公头、与快换接头公头相连的快换接头母头、与快换接头母头相连的快换连接件。
所述的左右调整装置包括与快换连接件连接的调整装置安装板、设置在调整装置安装板上的直线导轨、与直线导轨滑动配合的滑块、安装于左右调整装置安装板侧面的伺服电机、与伺服电机相连的联轴器、设置在调整装置安装板上且与联轴器配合的左移动机构和右移动机构。
所述的左移动机构包括安装在左右调整装置安装板上的左旋丝杆轴承座和左旋丝杆支撑座、设置在左旋丝杆轴承座和左旋丝杆支撑座上共同支撑转动的左旋丝杆、套在左旋丝杆上且随着左旋丝杆的转动左右移动的左旋丝杆螺母;所述的右移动机构包括安装在右右调整装置安装板上的右旋丝杆轴承座和右旋丝杆支撑座、设置在右旋丝杆轴承座和右旋丝杆支撑座上共同支撑转动的右旋丝杆、套在右旋丝杆上且随着右旋丝杆的转动右右移动的右旋丝杆螺母。
所述的直线导轨和滑块左右对称安装在右旋丝杆和左旋丝杆两侧,用来实现对旋转装置和砂芯夹取装置左右移动的导向。
所述的右旋丝杆和左旋丝杆通过丝杆联轴器相连,由伺服电机驱动,实现右旋丝杆螺母和左旋丝杆螺母的相向运动。
所述的左右调整装置安装板的侧面上按照顺序设置有用来检测左旋丝杆螺母和右旋丝杆螺母的末端光电传感器、起始端光电传感器、复位光电传感器。
所述的旋转装置包括安装在左旋丝杆螺母和右旋丝杆螺母上的旋转装置安装板、安装在旋转装置安装板上的左右支撑板、与左右支撑板相连的旋转电机安装板、安装在旋转电机安装板上的旋转电机、与旋转电机相连的小齿轮、与小齿轮啮合减速传动的大齿轮、与大齿轮相连的抓取装置安装板、安装于旋转装置安装板上防止转动过程中造成线缆和气管缠绕破坏的气电滑环。
所述的旋转装置由旋转电机驱动,由小齿轮和大齿轮啮合传动,以实现减速传动,增大旋转扭矩。
所述的砂芯抓取装置包括安装在抓取装置安装板上的三爪抓取气缸、安装在三爪抓取气缸上的夹爪安装板、安装在夹爪安装板上的夹爪。
本发明的有益效果是:左右调整装置通过与快换连接装置连接,实现夹具的横向调节,自动调整间距,使得砂芯能够在夹具上独立连续旋转,旋转装置将砂芯表面残余的涂料分离出去,防止涂料淤积在砂芯上,造成铸管的报废,同时配合砂芯抓取装置实现砂芯的自动抓取,码放的时候能够自动调整间距,砂芯能够在夹具上独立连续旋转,结构简单,适用性好。
附图说明
下面结合附图和实施例对本发明进一步说明。
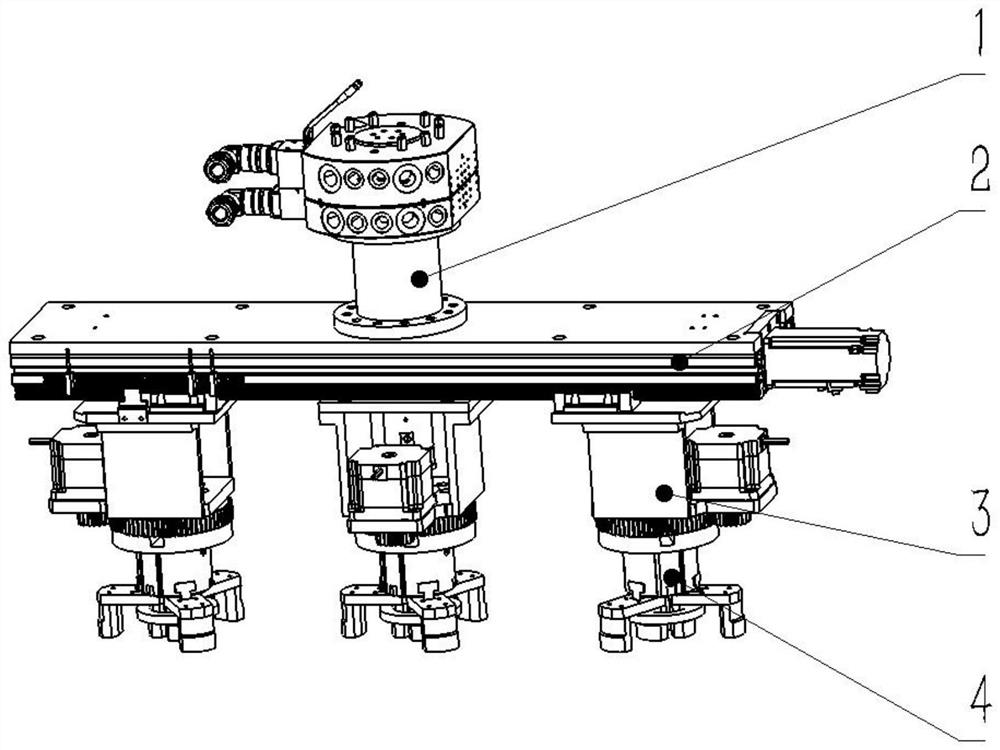
图1为本发明一种铸管砂芯机器人通用夹具示意图;
图2为本发明一种铸管砂芯机器人通用夹具的快换连接装置示意图;
图3为本发明一种铸管砂芯机器人通用夹具的左右调整装置示意图;
图4为本发明一种铸管砂芯机器人通用夹具的旋转装置示意图;
图5为本发明一种铸管砂芯机器人通用夹具的砂芯抓取装置示意图;
附图标记:1、快换连接装置;2、左右调整装置;3、旋转装置;4、砂芯抓取装置5、快换接头公头;6、快换接头母头;7、快换连接件;8、调整装置安装板;9、直线导轨;10、滑块;11、伺服电机;12、联轴器;13、右旋丝杆轴承座;14、右旋丝杆;15、右旋丝杆螺母16、右旋丝杆支撑座;17、丝杆联轴器;18、左旋丝杆轴承座;19、左旋丝杆;20、左旋丝杆螺母;21、左旋丝杆支撑座;22、末端光电传感器;23、起始端光电传感器;24、复位光电传感器;25、旋转装置安装板;26、左右支撑板;27、旋转电机;28、旋转电机安装板;29、小齿轮;30、大齿轮;31、抓取装置安装板32、气电滑环;33、三爪抓取气缸;34、夹爪安装板;35、夹爪。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本发明进一步阐述。
如图1至图5所示,一种铸管砂芯机器人通用夹具,包括:
快换连接装置,与工业机器人通用夹具的上部连接,用于实现夹具的连接;
左右调整装置,与快换连接装置连接,实现夹具的横向调节,自动调整间距;
旋转装置,在左右调整装置均布有若干组,使得砂芯能够在夹具上独立连续旋转,将砂芯表面残余的涂料分离出去,防止涂料淤积在砂芯上,造成铸管的报废;
砂芯抓取装置,每组左右调整装置上均有设置,实现砂芯的自动抓取。
左右调整装置通过与快换连接装置连接,实现夹具的横向调节,自动调整间距,使得砂芯能够在夹具上独立连续旋转,旋转装置将砂芯表面残余的涂料分离出去,防止涂料淤积在砂芯上,造成铸管的报废,同时配合砂芯抓取装置实现砂芯的自动抓取,码放的时候能够自动调整间距,砂芯能够在夹具上独立连续旋转,结构简单,适用性好。
所述的快换连接装置包括安装在工业机器人末端的快换接头公头5、与快换接头公头5相连的快换接头母头6、与快换接头母头6相连的快换连接件7。
所述的左右调整装置包括与快换连接件7连接的调整装置安装板8、设置在调整装置安装板8上的直线导轨9、与直线导轨9滑动配合的滑块10、安装于左右调整装置安装板8侧面的伺服电机11、与伺服电机11相连的联轴器12、设置在调整装置安装板8上且与联轴器12配合的左移动机构和右移动机构。
所述的左移动机构包括安装在左右调整装置安装板8上的左旋丝杆轴承座18和左旋丝杆支撑座21、设置在左旋丝杆轴承座18和左旋丝杆支撑座21上共同支撑转动的左旋丝杆19、套在左旋丝杆19上且随着左旋丝杆19的转动左右移动的左旋丝杆螺母20;所述的右移动机构包括安装在右右调整装置安装板8上的右旋丝杆轴承座13和右旋丝杆支撑座16、设置在右旋丝杆轴承座13和右旋丝杆支撑座16上共同支撑转动的右旋丝杆14、套在右旋丝杆14上且随着右旋丝杆14的转动右右移动的右旋丝杆螺母15。
所述的直线导轨9和滑块10左右对称安装在右旋丝杆14和左旋丝杆19两侧,用来实现对旋转装置和砂芯夹取装置左右移动的导向。
所述的右旋丝杆14和左旋丝杆19通过丝杆联轴器17相连,由伺服电机11驱动,实现右旋丝杆螺母15和左旋丝杆螺母20的相向运动。
所述的左右调整装置安装板8的侧面上按照顺序设置有用来检测左旋丝杆螺母20和右旋丝杆螺母15的末端光电传感器22、起始端光电传感器23、复位光电传感器24。
所述的旋转装置包括安装在左旋丝杆螺母20和右旋丝杆螺母15上的旋转装置安装板25、安装在旋转装置安装板25上的左右支撑板26、与左右支撑板26相连的旋转电机安装板28、安装在旋转电机安装板28上的旋转电机27、与旋转电机27相连的小齿轮29、与小齿轮29啮合减速传动的大齿轮30、与大齿轮30相连的抓取装置安装板31、安装于旋转装置安装板25上防止转动过程中造成线缆和气管缠绕破坏的气电滑环32。
所述的旋转装置由旋转电机27驱动,由小齿轮29和大齿轮30啮合传动,以实现减速传动,增大旋转扭矩。
所述的砂芯抓取装置包括安装在抓取装置安装板31上的三爪抓取气缸33、安装在三爪抓取气缸33上的夹爪安装板34、安装在夹爪安装板34上的夹爪35。
所述的三爪抓取气缸33动作,带动夹爪安装板34和夹爪35张开。
所述的夹爪35设置有三组,三个夹爪35撑紧砂芯内表面,完成砂芯的抓取。
本发明的使用方法:
1、左右位置调整:
制芯机完成砂芯制造后,由制芯机上的顶升装置将砂芯顶升出制芯工位,然后工业机器人带着末端的砂芯抓取装置完成对砂芯的抓取,伺服电机11动作,由联轴器12带动右旋丝杆14和左旋丝杆19转动,进而带动右旋丝杆螺母15和左旋丝杆螺母20相向运动,调整砂芯抓取装置4的左右位置符合制芯机制芯完成后砂芯的出料位置;
2、砂芯抓取放料:
左右调整装置2调整完成后,此时三爪抓取气缸33处于收缩状态,砂芯抓取夹具在机器人的带动下到达指定位置;然后三爪抓取气缸33动作,带动夹爪安装板34和夹爪35张开,三个夹爪35撑紧砂芯内表面,完成砂芯的抓取,待到达放料位在后,三爪抓取气缸33动作,带动夹爪安装板34和夹爪35缩紧,完成砂芯的放料;
3、砂芯旋转:
砂芯浸涂完成后,需要对砂芯进行连续旋转,将砂芯表面残余的涂料分离出去,防止涂料淤积在砂芯上,造成铸管的报废,浸涂完成后,砂芯抓取装置完成对砂芯的抓取,此时,旋转电机27动作,带动小齿轮29转动,通过小齿轮29和大齿轮30的啮合传动,带动大齿轮转动,进而带动整个砂芯抓取装置4连续转动,在大齿轮30的回转中心安装有气电滑环32,防止转动过程中造成线缆和气管缠绕破坏。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种铸管砂芯机器人通用夹具
- 一种轻量化车桥砂芯和砂芯夹具以及自动下芯机器人