一种果树冠层全覆盖智能立体植保系统与方法
文献发布时间:2023-06-19 10:30:40
技术领域
本发明属于果树植保技术领域,尤其涉及一种果树冠层全覆盖智能立体植保系统与方法。
背景技术
果树病虫害防治是果园生产关键环节,良好的防治效果可以有效保障水果稳产高产,提高果园经济效益。当前果树施药仍是果树病虫害防治的主要手段,但由于目前果树施药多采用单一植保机械,较难达到果树冠层药液喷全、打透的效果,如申请号为201910696903.0的中国专利提出一种风送式变量喷雾机,该喷雾机采用立式可调喷雾支架支撑喷雾系统;申请号为201910580549.5的中国专利提出一种基于多传感器的精准变量果树施药机器人,该机器人喷雾系统亦是由上至下竖直等距安装在支撑杆上,上述专利中冠层下部药液覆盖、穿透效果较好,但对树冠高大、冠层宽厚甚至行间郁闭的果树,仍然存在冠层上下、内外受药差异大,全冠层施药效果不理想的问题。申请号为201611150772.9的中国专利提出一种用于果树喷药的无人机,该无人机施药,果树冠层上部药液覆盖、穿透效果良好,但冠层下部雾滴沉积较少。因此,仍然需要有一种可以实现果树全冠层施药的植保系统与方法。
发明内容
针对上述技术问题,本发明提供一种果树冠层全覆盖智能立体植保系统与方法,旨在解决果树喷雾过程中冠层上下、内外药液喷洒均匀性差、穿透性弱的问题。
为实现上述目的,本发明采用如下技术方案:
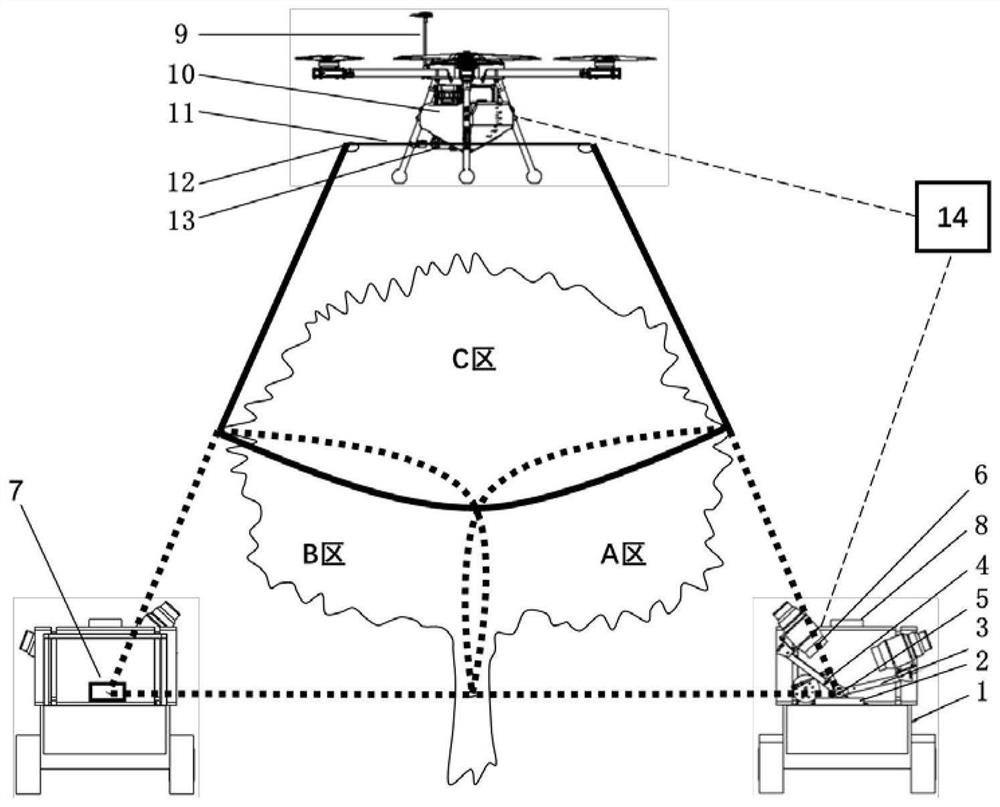
一种果树冠层全覆盖智能立体植保系统包括:地面喷雾机1、植保无人机9和地面管理平台14;
所述地面喷雾机1包括:施药部件2、距离传感器7、微控制器8;
所述施药部件2设置于地面喷雾机1的后端,用于实现果树冠层下部施药;
所述地面喷雾机1的前端安装有距离传感器7,用于检测地面喷雾机1中心线与树干的垂直距离;
所述地面喷雾机1的上端安装有微控制器8,用于和地面管理平台14通信及控制喷雾执行器作业;
所述植保无人机9包括:药液喷洒机构、雷达13;
所述药液喷洒机构设置于植保无人机9的下端,用于实现果树冠层上部施药;
所述植保无人机9下端还搭载雷达13,用于检测植保无人机9与果树冠层顶部的距离;
所述地面管理平台14用于和地面喷雾机1、植保无人机9通信。
在上述方案的基础上,所述施药部件2包括:右喷雾执行器3、左喷雾执行器4、转轴5和管道风机6;
所述右喷雾执行器3和左喷雾执行器4绕转轴5旋转,右喷雾执行器3和左喷雾执行器4施药独立控制,可实现单双行施药作业自由切换;
所述右喷雾执行器3和左喷雾执行器4的前端安装有管道风机6,用于提高药液雾化程度、雾滴穿透能力及其覆盖范围。
在上述方案的基础上,所述距离传感器7与转轴5位于同一直线且位于地面喷雾机1中心线位置。
在上述方案的基础上,所述药液喷洒机构包括:药箱10、喷杆11和喷头12;
所述喷杆11位于药箱10下端并与植保无人机9的支撑架连接;
所述喷头12安装于喷杆11上。
一种果树冠层全覆盖智能立体植保方法使用上述系统,包括以下步骤:
第一步:对冠层下部施药,打开地面管理平台14,向地面喷雾机1发布施药指令,地面喷雾机1在果树行间循行作业,行进时通过距离传感器7检测地面喷雾机1中心线与树干的垂直距离,将该距离传输至地面管理平台14,地面管理平台14接收到距离信息后,根据特定果树的植株高度、最大冠层幅度、最大冠层幅度处距地面高度的变化因子及距离传感器7与地面的高度等信息确定右喷雾执行器3和左喷雾执行器4的旋转角度,并将该角度传输给地面喷雾机1的微控制器8,从而控制右喷雾执行器3和左喷雾执行器4根据要求进行冠层下部施药,作业结束后地面喷雾机1向地面管理平台14发布冠层下部施药结束指令;
第二步:对冠层上部施药,地面管理平台14接收到地面喷雾机1发布的冠层下部施药结束指令后,启动植保无人机9冠层上部施药程序,并根据果树植株高度、最大冠层幅度、最大冠层幅度处距地面高度的变化因子、喷杆11长度和喷头12的喷雾角度等信息确定植保无人机9与冠层顶部的相对高度,并将高度传输给植保无人机9的飞行控制器,并结合现有仿地形飞行技术控制植保无人机9实际作业高度和地面管理平台14传输给飞行控制器的高度保持一致,从而进行冠层上部施药,作业结束后植保无人机9向地面管理平台14发布冠层上部施药结束指令;
第三步:地面管理平台14接收到植保无人机9发布的冠层上部施药结束指令后,果树冠层全覆盖智能立体植保作业全部完成,关闭地面管理平台14。
在上述方案的基础上,第一步所述的右喷雾执行器3和左喷雾执行器4旋转角度,通过式(1)计算:
其中,H、L、k分别为预设的果树植株高度、最大冠层幅度和最大冠层幅度处距地面高度的变化因子,d为距离传感器7与地面的垂直高度,x为地面喷雾机1中心线与树干的垂直距离。
在上述方案的基础上,第二步所述的植保无人机9与果树冠层顶部的相对高度h通过式(2)计算:
其中,H、L、k分别为预设的果树植株高度、最大冠层幅度和最大冠层幅度处距地面高度的变化因子,G为喷杆11长度,β为正常作业条件下喷头12喷雾角度。
与现有技术相比,本发明有益效果在于:
(1)本发明通过地面喷雾机循行作业与植保无人机寻冠顶作业,实现了果树作业区域全覆盖;
(2)本发明通过地面喷雾机进行冠层下部施药和植保无人机进行冠层上部施药,实现了果树全冠层施药范围全覆盖;
(3)本发明地面喷雾机喷雾执行器上安装有管道风机,提高了冠层下部雾滴穿透性、覆盖范围及叶片背面药液附着率;
(4)本发明植保无人机运用仿地形飞行技术,提高了冠层上部雾滴覆盖均匀性。
附图说明
图1为本发明果树冠层全覆盖智能立体植保系统组成示意图;
图2为本发明地面喷雾机和植保无人机行进路径示意图;
图3为本发明地面喷雾机施药覆盖范围示意图;
图4为本发明植保无人机施药覆盖范围示意图;
图5为本发明地面喷雾机示意图;
图6为本发明植保无人机示意图;
图中,1.地面喷雾机,2.施药部件,3.右喷雾执行器,4.左喷雾执行器,5.转轴,6.管道风机,7.距离传感器,8.微控制器,9.植保无人机,10.药箱,11.喷杆,12.喷头,13.雷达,14.地面管理平台。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细说明。
如图1、图5和图6所示,为了实现果树全冠层智能化均匀施药,本发明基于果树冠层全覆盖智能立体植保系统,所述系统包括:地面喷雾机1、植保无人机9和地面管理平台14;
所述地面喷雾机1后端设有施药部件2;所述施药部件2包括右喷雾执行器3、左喷雾执行器4、转轴5和管道风机6,其中右喷雾执行器3和左喷雾执行器4绕转轴5旋转,用于实现果树冠层下部A区和B区的覆盖喷雾,同时右喷雾执行器3和左喷雾执行器4前端安装有管道风机6,用于提高药液雾化程度、雾滴穿透能力及其覆盖范围,且右喷雾执行器3和左喷雾执行器4施药独立控制,可实现单双行施药作业自由切换;所述地面喷雾机1前端安装有距离传感器7,其与转轴5位于同一直线并位于地面喷雾机1中心线位置,用于检测地面喷雾机1中心线与树干的垂直距离;所述地面喷雾机1上端安装有微控制器8,用于和地面管理平台14通信及控制右喷雾执行器3和左喷雾执行器4作业;
所述植保无人机9下端设有药液喷洒机构和雷达13;所述药液喷洒机构包括药箱10、喷杆11和喷头12,其中喷杆11位于药箱10下端并与植保无人机9的支撑架连接,喷头12安装于喷杆11上,用于实现果树冠层上部C区的施药;所述雷达13,用于检测植保无人机9与果树冠层顶部的距离;
所述地面管理平台14用于和地面喷雾机1、植保无人机9通信。
果树冠层全覆盖智能立体植保方法,使用上述系统,考虑到地面喷雾机1和植保无人机9同时作业,管道风机6的风场和植保无人机9的旋翼风场相互影响,本发明采用地面喷雾机1和植保无人机9先后施药的方式。
如图2所示,地面喷雾机1采取循行作业方式,即在果树行间行进,施药范围覆盖图1所示A区和B区,实线为其行进轨迹;植保无人机9采取寻冠顶作业方式,即在果树冠层顶部正上方飞行,施药范围覆盖图1所示C区,虚线为其飞行轨迹;图中云形框表示果树冠层俯视图;果树冠层全覆盖智能立体植保方法,具体步骤如下:
第一步:冠层下部施药
首先,获取地面喷雾机1中心线与树干垂直距离;
具体实施时,打开地面管理平台14,向地面喷雾机1发布施药指令,地面喷雾机1在果树行间行进,通过距离传感器7检测地面喷雾机1中心线与树干的垂直距离,并将距离传输至地面管理平台14;
其次,确定右喷雾执行器3和左喷雾执行器4旋转角度;
具体实施时,如图3所示,地面管理平台14接收到距离信息后,根据式(1)确定喷雾执行器旋转角度α:
其中,H、L、k分别为预设的果树植株高度、最大冠层幅度和最大冠层幅度处距地面高度的变化因子(针对特定区域的特定果树品种,果树整形后其植株高度和最大冠层幅度一般均相近,分别预设为H和L,而最大冠层幅度处距地面高度因受多种因素影响差异较大,因此设置其变化因子为k,作业时根据实际果园情况分别确定H、L和k的取值),d为距离传感器7与地面的垂直高度,x为地面喷雾机1中心线与树干的垂直距离;
最后,地面喷雾机1施药
具体实施时,地面管理平台14确定喷雾执行器旋转角度后将其传输给地面喷雾机1的微控制器8,进而控制右喷雾执行器3和左喷雾执行器4根据要求进行冠层下部施药;作业结束后,地面喷雾机1向地面管理平台14发布冠层下部施药结束指令;
第二步:冠层上部施药
首先,确定植保无人机9与果树冠层顶部相对高度
具体实施时,地面管理平台14接收到地面喷雾机1发布的冠层下部施药结束指令后,启动植保无人机9冠层上部施药程序,并根据图4和式(2),确定植保无人机9与果树冠层顶部的相对高度h:
其中,H、L、k分别为预设的果树植株高度、最大冠层幅度和最大冠层幅度处距地面高度的变化因子,G为喷杆11长度,β为正常作业条件下喷头12喷雾角度;
其次,植保无人机9施药
具体实施时,地面管理平台14确定植保无人机9与果树冠层顶部相对高度后将其传输给植保无人机9的飞行控制器,并采用现有仿地形飞行技术控制植保无人机9实际作业高度和地面管理平台14传输给飞行控制器的高度保持一致,从而进行冠层上部施药;作业结束后,植保无人机9向地面管理平台14发布冠层上部施药结束指令;
第三步,地面管理平台14接收到植保无人机9发布的冠层上部施药结束指令后,果树冠层全覆盖智能立体植保作业全部完成,关闭地面管理平台。
上述实施例仅为本发明的较佳实例而已,并非是本发明实施方式的限定,对于所属领域的普通技术人员来说,在上述说明基础上还可以做出其他不同形式的变化或变动,这里无需也无法对所有的实施方式予以穷举,凡在本发明精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
- 一种果树冠层全覆盖智能立体植保系统与方法
- 一种果树冠层全覆盖智能立体植保系统与方法