基板处理方法、基板处理装置以及基板处理系统
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及一种基板处理方法、基板处理装置以及基板处理系统。
背景技术
一直以来,提出有对基板依次供给互不相同的处理液来进行处理的基板处理装置。该基板处理装置具有将基板保持为水平姿势的基板保持部、使基板保持部旋转来使基板在水平面内旋转的旋转机构以及从基板的上方喷出处理液的第一喷出喷嘴及第二喷出喷嘴。在俯视观察时,第一喷出喷嘴及第二喷出喷嘴分别从基板的中央附近喷出处理液。
当从第一喷出喷嘴向基板喷出第一处理液时,该第一处理液着落于基板的中央附近,受到伴随基板旋转的离心力而在基板上扩展,从基板的周缘飞散。第一处理液可使用SC1液(氨水、过氧化氢水及水的混合液)、SC2液(盐酸、过氧化氢水及水的混合液)、DHF液(稀氢氟酸)等。由此,能够对基板进行与第一处理液相应的处理。
接着,进行利用第二处理液的处理。即,将喷出处理液的喷嘴由第一喷出喷嘴切换为第二喷出喷嘴。具体而言,一边停止从第一喷出喷嘴喷出第一处理液,一边开始从第二喷出喷嘴喷出第二处理液。第二处理液着落于基板的中央附近,受到伴随基板旋转的离心力而在基板上扩展,从基板的周缘飞散。作为第二处理液,例如可以采用纯水。由此,能够从基板冲洗第一处理液。
另外,还提出有利用相机来监视从喷出喷嘴喷出的处理液的喷出状态的技术(例如专利文献1、专利文献2)。在专利文献1、专利文献2中,利用相机来拍摄包含喷出喷嘴的前端的拍摄区域,并基于该相机的拍摄图像来判定是否正从喷出喷嘴喷出处理液。
现有技术文献
专利文献
专利文献1:日本特开2017-29883号公报
专利文献2:日本特开2015-173148号公报
发明内容
发明要解决的问题
在将喷出处理液的喷嘴由第一喷出喷嘴切换为第二喷出喷嘴时,停止从第一喷出喷嘴喷出处理液的喷出停止时刻与开始从第二喷出喷嘴喷出处理液的喷出开始时刻之间的时间差很重要。
例如,从第二喷出喷嘴喷出处理液的开始时刻相对于第一喷出喷嘴的喷出停止时刻越迟,则基板的表面越容易局部地干燥(液干涸)。若基板的表面干燥,则可能产生不良状况(例如颗粒的附着)。
为了避免该基板的干燥,只要在第一喷出喷嘴的喷出停止时刻之前开始第二喷出喷嘴的喷出即可。例如,在第一处理液的喷出停止期间,第一处理液的喷出量随时间经过而降低,最终成为零。通过在该第一处理液的喷出停止期间开始第二处理液的喷出,能够在基板上不间断地供给处理液,能够降低基板干燥的可能性。
然而,若第二喷出喷嘴的喷出开始时刻过早,则会在第一处理液仍以充分的喷出量喷出的状态下,开始喷出第二处理液。此时,供给到基板的处理液的总量变大,处理液在基板上回溅(溅液)。这样的溅液的产生是不优选的。
因此,优选以不产生溅液及液干涸的方式调整时间差。
另外,上述时间差有时也对是否良好地处理基板造成影响。此时,优选以使处理结果变得良好的方式调整时间差。
因此,本申请的目的在于,提供一种能以所需的时间差进行由第一喷嘴向第二喷嘴的切换的基板处理方法、基板处理装置以及基板处理系统。
用于解决问题的手段
基板处理方法的第一形态为,一种基板处理方法,具有:第一工序,保持基板;第二工序,开始利用相机对包含第一喷嘴的前端及第二喷嘴的前端的拍摄区域进行拍摄,从而生成拍摄图像;第三工序,开始从所述第一喷嘴向所述基板喷出处理液;第四工序,停止从所述第一喷嘴喷出处理液,开始从所述第二喷嘴喷出处理液;第五工序,基于针对所述拍摄图像的图像处理,求出在所述第四工序中开始从所述第二喷嘴喷出处理液的开始时刻与停止从所述第一喷嘴喷出处理液的停止时刻之间的时间差;以及第六工序,判定所述时间差是否在规定范围外,在判定为所述时间差在所述规定范围外时,以使所述时间差处于所述规定范围内的方式,调整所述开始时刻及所述停止时刻中的至少任一者。
基板处理方法的第二形态为,在第一形态的基板处理方法中,调整所述停止时刻而不调整所述开始时刻。
基板处理方法的第三形态为,在第一形态或第二形态的基板处理方法中,在所述第五工序中,基于所述拍摄图像的各帧(frame)中从所述第一喷嘴的前端向所述第一喷嘴的喷出方向延伸的第一喷出判定区域的像素值,确定所述停止时刻,基于各帧中从所述第二喷嘴的前端向所述第二喷嘴的喷出方向延伸的第二喷出判定区域的像素值,确定所述开始时刻。
基板处理方法的第四形态为,在第三形态的基板处理方法中,基于所述第一喷出判定区域的像素值的统计量大于阈值的帧以及作为所述帧的下一帧的所述第一喷出判定区域的统计量小于所述阈值的帧,来确定所述停止时刻,基于所述第二喷出判定区域的像素值的统计量小于所述阈值的帧以及作为所述帧的下一帧的所述第一喷出判定区域的统计量大于所述阈值的帧,确定所述开始时刻。
基板处理方法的第五形态为,在第四形态的基板处理方法中,在所述第六工序中,将关于所述第一喷嘴及所述第二喷嘴的表示所述统计量的时间变化的图显示在用户界面上,在对所述用户界面进行针对对象时刻的输入时,根据所述输入来调整所述对象时刻,所述对象时刻为所述开始时刻及所述停止时刻中的至少任一者。
基板处理方法的第六形态为,在第一形态至第三形态中的任一形态的基板处理方法中,在所述第五工序中,使用经机器学习的分类器,对于所述第一喷嘴及所述第二喷嘴中的各喷嘴,将所述拍摄图像所包含的各帧分类为处理液的喷出或停止,并基于其分类结果求出所述时间差。
基板处理方法的第七形态为,在第六形态的基板处理方法中,基于对所述第一喷嘴分类为喷出的帧以及作为该帧的下一帧的对所述第一喷嘴分类为停止的帧,来确定所述停止时刻,基于对所述第二喷嘴分类为停止的帧以及作为该帧的下一帧的对所述第二喷嘴分类为喷出的帧,来确定所述开始时刻。
基板处理方法的第八形态为,在第六形态的基板处理方法中,所述停止时刻在所述开始时刻之后,基于被分类为所述第一喷嘴及所述第二喷嘴两者都喷出处理液的帧的个数以及所述帧之间的时间,求出所述时间差。
基板处理方法的第九形态为,在第一形态至第八形态中的任一形态的基板处理方法中,在所述第六工序中,在判定为所述时间差在规定范围外时,将所述时间差在规定范围外的情况报知给作业人员。
基板处理方法的第十形态为,在第一形态至第九形态中的任一形态的基板处理方法中,所述停止时刻在所述开始时刻之后,所述基板处理方法还包括第七工序,所述第七工序,基于针对所述拍摄图像的图像处理,来判定是否产生处理液在基板上飞溅的溅液,在判定为产生所述溅液时,以减小所述开始时刻与所述停止时刻之间的时间差的方式,调整所述开始时刻及所述停止时刻中的至少任一者。
基板处理方法的第十一形态为,在第十形态的基板处理方法中,在所述第七工序中,使用经机器学习的分类器,将所述拍摄图像的各帧分类为有所述溅液或无所述溅液。
基板处理方法的第十二形态为,在第十一形态的基板处理方法中,在所述第七工序中,将所述拍摄图像的各帧中的所述第一喷嘴及所述第二喷嘴的附近的溅液判定区域切出,使用所述分类器,将所述溅液判定区域分类为有无溅液或无溅液。
基板处理方法的第十三形态为,在第六形态至第八形态、第十一形态、第十二形态中的任一形态的基板处理方法中,从与所述基板的种类、所述处理液的种类、所述第一喷嘴及所述第二喷嘴的位置以及所述处理液的流量中的至少任一者相应的多个经机器学习的分类器中选择一个分类器,基于所选择的分类器,对所述拍摄图像所包含的各帧进行分类。
基板处理方法的第十四形态为,在第十三形态的基板处理方法中,在将所述基板的种类、所述处理液的种类、所述第一喷嘴及所述第二喷嘴的位置以及所述处理液的流量中的至少任一者输入至输入部时,根据对所述输入部的输入,从多个所述分类器中选择一个分类器。
基板处理装置的第一形态具有:基板保持部,保持基板,处理液供给部,具有对所述基板喷出处理液的第一喷嘴和对所述基板喷出处理液的第二喷嘴,相机,对包含所述第一喷嘴的前端及所述第二喷嘴的前端的拍摄区域进行拍摄,从而生成拍摄图像,以及控制部;所述控制部,以在开始从所述第一喷嘴向所述基板喷出处理液之后,开始从所述第二喷嘴向所述基板喷出处理液,并停止从所述第一喷嘴向所述基板喷出处理液的方式,控制所述处理液供给部,并且,基于针对所述拍摄图像的图像处理,求出开始从所述第二喷嘴喷出处理液的开始时刻与停止从所述第一喷嘴喷出处理液的停止时刻之间的时间差,在判定为所述时间差在规定范围外时,以使所述时间差处于所述规定范围内的方式,调整所述开始时刻及所述停止时刻中的至少任一者。
基板处理装置的第二形态为,在第一形态的基板处理装置中,所述控制部使用经机器学习的分类器,对于所述第一喷嘴及所述第二喷嘴,将所述拍摄图像所包含的各帧分类为表示处理液的喷出或停止的状态的类别,并基于其分类结果来求出所述时间差。
基板处理装置的第三形态为,在第二形态的基板处理装置中,所述控制部从与所述基板的种类、所述处理液的种类、所述第一喷嘴及所述第二喷嘴的位置以及所述处理液的流量中的至少任一者相应的多个经机器学习的分类器中选择一个分类器,并且,基于所选择的分类器,对所述拍摄图像所包含的各帧进行分类。
基板处理装置的第四形态为,在第三形态的基板处理装置中,具有输入部,所述输入部,用于输入所述基板的种类、所述处理液的种类、所述第一喷嘴及所述第二喷嘴的位置以及所述处理液的流量中的至少任一者,所述控制部根据对所述输入部的输入,从多个所述分类器中选择一个分类器。
基板处理系统的形态具有基板处理装置以及与所述基板处理装置通信的服务器,所述基板处理装置具有:基板保持部,保持基板,处理液供给部,具有对所述基板喷出处理液的第一喷嘴和对所述基板喷出处理液的第二喷嘴,相机,对包含所述第一喷嘴的前端及所述第二喷嘴的前端的拍摄区域进行拍摄,生成拍摄图像,以及控制部,以在开始从所述第一喷嘴向所述基板喷出处理液之后,开始从所述第二喷嘴向所述基板喷出处理液,并停止从所述第一喷嘴向所述基板喷出处理液的方式,控制所述处理液供给部;所述基板处理装置及服务器使用经机器学习的分类器,对于所述第一喷嘴及所述第二喷嘴,将所述拍摄图像所包含的各帧分类为表示处理液的喷出或停止的状态的类别,并基于其分类结果,求出开始从所述第二喷嘴喷出处理液的开始时刻与停止从所述第一喷嘴喷出处理液的停止时刻之间的时间差,所述控制部在判定为所述时间差在规定范围外时,以使所述时间差处于所述规定范围内的方式,调整所述开始时刻及所述停止时刻中的至少任一者。
发明的效果
根据基板处理方法的第一形态、基板处理装置的第一形态,基于针对拍摄图像的图像处理来求出开始时刻与停止时刻之间的时间差,因而能够以高精度求出时间差。因此,能够以高精度将时间差调整至规定范围内。
由此,例如,能够大致避免产生处理液在基板上飞溅的溅液以及基板局部地干燥的液干涸。
根据基板处理方法的第二形态,能够在不变更从第一喷嘴供给处理液的处理期间的长度的情况下,将时间差设为规定范围内。
根据基板处理方法的第三形态,使用第一喷出判定区域及第二喷出判定区域的像素值,因而与对整个拍摄图像进行图像处理的情况相比,能够减轻处理。
根据基板处理方法的第四形态,能够通过简易的处理来确定开始时刻及停止时刻。
根据基板处理方法的第五形态,作业人员能够目视确认统计量的时间变化,并基于该时间变化来调整时间差。
根据基板处理方法的第六形态、基板处理装置的第二形态以及基板处理系统的形态,能够通过机器学习以高精度求出时间差。
根据基板处理方法的第七形态,能够适当地确定时间差。
根据基板处理方法的第八形态,能够适当地确定时间差。
根据基板处理方法的第九形态,作业人员能够认识到时间差在规定范围外。
根据基板处理方法的第十形态,能够以可减少溅液产生的方式调整时间差。
根据基板处理方法的第十一形态,能够以高精度判定有无溅液。
根据基板处理方法的第十二形态,能够提高分类精度。
根据基板处理方法的第十三形态及基板处理装置的第三形态,能钩以高精度对各帧进行分类。
根据基板处理方法的第十四形态及基板处理装置的第四形态,作业人员能够将信息输入至输入部。
附图说明
图1是示出基板处理装置的结构的概略的一个示例的图。
图2是示出处理单元的结构的概略的一个示例的俯视图。
图3是示出处理单元的结构的概略的一个示例的俯视图。
图4是示出控制部的动作的一个示例的流程图。
图5是概略性地示出由相机生成的帧的一个示例的图。
图6是概略性地示出由相机生成的帧的一个示例的图。
图7是概略性地示出由相机生成的帧的一个示例的图。
图8是概略性地示出由相机生成的帧的一个示例的图。
图9是示出监视处理的具体的一个示例的流程图。
图10是概略性地示出喷出判定区域内的亮度分布的一个示例的图(graph)。
图11是概略性地示出喷出判定区域内的亮度分布的一个示例的图。
图12是概略性地示出喷出判定区域内的像素值的统计量的时间变化的一个示例的图。
图13是概略性地示出喷出判定区域内的像素值的统计量的时间变化的一个示例的图。
图14是概略性地示出控制部的内部结构的一个示例的功能框图。
图15是示出监视处理的具体的一个示例的流程图。
图16是概略性地示出拍摄图像的多个帧的一个示例的图。
图17是概略性地示出控制部的内部结构的一个示例的功能框图。
图18是概略性地示出输入画面的一个示例的图。
图19是概略性地示出基板处理装置及服务器的一个示例的功能框图。
图20是概略性地示出深度学习(deeplearning)的模型的一个示例的图。
图21是概略性地示出由相机生成的帧的一个示例的图。
图22是概略性地示出溅液判定区域内的像素值的统计量的时间变化的一个示例的图。
图23是示出监视处理的具体的一个示例的流程图。
图24是示出处理单元的结构的概略的一个示例的俯视图。
图25是概略性地示出由相机生成的帧的一个示例的图。
具体实施方式
以下,一边参照所附的附图一边对实施方式进行说明。此外,附图为概略性地示出,为了便于说明,适当将结构省略或将结构简化。另外,附图所示的结构等的大小及位置的相互关系未必准确地记载,可适当变更。
另外,在以下所示的说明中,对同样的构成要素标注相同的附图标记来进行图示,关于这些构成要素的名称及功能也设为同样。因此,有时为了避免重复而将关于这些构成要素的详细说明省略。
第一实施方式.
<基板处理装置的概要>
图1为示出基板处理装置100的总体结构的图。基板处理装置100为对基板W供给处理液而对基板W进行处理的装置。基板W例如为半导体基板。该基板W具有大致圆板形状。
该基板处理装置100能够将至少两种处理液依次供给到基板W。例如,基板处理装置100能够在对基板W供给清洗用的药液后,对基板W供给冲洗液,由此进行清洗处理。该药液典型而言可使用SC1液(氨水、过氧化氢水及水的混合液)、SC2液(盐酸、过氧化氢水及水的混合液)、DHF液(稀氢氟酸)等。作为该冲洗液,例如可使用纯水等。在本说明书中,将药液与冲洗液统称为“处理液”。此外,不仅是清洗处理,用于成膜处理的光阻液等涂布液、用于将不需要的膜去除的药液、用于蚀刻的药液等也包含在“处理液”中。
基板处理装置100具有分度器102、多个处理单元1以及主搬运机器人103。分度器102具有将从装置外接受的未处理的基板W搬入装置内,并且将清洗处理结束的经处理的基板W搬出至装置外的功能。分度器102载置多个搬运器(carrier)并且具有移送机器人(均省略图示)。作为搬运器,可采用将基板W收纳于密闭空间的FOUP(front opening unifiedpod:前开式晶圆传送盒)或SMIF(Standard Mechanical Inter Face:标准机械界面)盒、或者在收纳的状态下将基板W曝露于外部空气的OC(open cassette:开放式晶圆匣)。移送机器人在该搬运器与主搬运机器人103之间移送基板W。
在基板处理装置100中配置有12个处理单元1。详细的配置结构为,以包围主搬运机器人103的周围的方式配置有4个塔(tower),该塔是将3个处理单元1层叠而成。换言之,包围主搬运机器人103而配置的4个处理单元1分三段层叠,图1示出其中的一层。此外,搭载于基板处理装置100的处理单元1的个数不限定于12个,例如也可以为8个或4个。
主搬运机器人103设置在包含层叠的处理单元1的4个塔的中央。主搬运机器人103将从分度器102接受的未处理的基板W搬入各处理单元1,并且从各处理单元1搬出经处理的基板W并交给分度器102。
接着,对处理单元1进行说明。以下,对搭载于基板处理装置100的12个处理单元1中的一个进行说明,但对于其他处理单元1而言也同样。图2为处理单元1的俯视图。另外,图3为处理单元1的纵剖面图。此外,图2示出未在基板保持部20上保持基板W的状态,图3示出在基板保持部20上保持有基板W的状态。
处理单元1在腔室10内具有以下部分作为主要的要素:基板保持部20,将基板W保持为水平姿势(基板W的法线沿着铅垂方向的姿势);3个处理液供给部30、60、65,用于对由基板保持部20所保持的基板W的上表面供给处理液;处理杯40,包围基板保持部20的周围;以及相机70,对基板保持部20的上方空间进行拍摄。另外,在腔室10内的处理杯40的周围,设置有将腔室10的内侧空间上下分隔的分隔板15。
腔室10具有沿着铅垂方向的侧壁11、将由侧壁11所包围的空间的上侧封闭的顶壁12以及将下侧封闭的底壁13。由侧壁11、顶壁12以及底壁13所包围的空间成为基板W的处理空间。另外,在腔室10的侧壁11的一部分,设置有供主搬运机器人103相对于腔室10搬入搬出基板W的搬入搬出口以及打开和关闭该搬入搬出口的闸门(均省略图示)。
在腔室10的顶壁12上安装有风扇过滤单元(Fan Filter Unit,FFU)14,用于将设置有基板处理装置100的洁净室(clean room)内的空气进一步清洁化并供给到腔室10内的处理空间。风扇过滤单元14具有用于取入洁净室内的空气并送出至腔室10内的风扇及过滤器(例如HEPA过滤器(High Efficiency Particulate Air Filter:高效空气过滤器)),在腔室10内的处理空间形成清洁空气的降流(down flow)。为了使从风扇过滤单元14供给的清洁空气均匀地分散,也可以在顶壁12的正下方设置穿设有多个吹出孔的冲孔板(punching plate)。
基板保持部20例如为旋转卡盘(spin chuck)。该基板保持部20具有圆板形状的旋转底座(spin base)21,该旋转底座21以水平姿势固定在沿铅垂方向延伸的旋转轴24的上端。在旋转底座21的下方,设置有使旋转轴24旋转的旋转马达22。旋转马达22经由旋转轴24使旋转底座21在水平面内旋转。另外,以包围旋转马达22及旋转轴24的周围的方式设置有筒状的盖构件23。
圆板形状的旋转底座21的外径略大于由基板保持部20保持的圆形的基板W的直径。因此,旋转底座21具有与应保持的基板W的整个下表面相向的保持面21a。
在旋转底座21的保持面21a的周缘部,立设有多个(在本实施方式中为4个)卡盘销26。多个卡盘销26在与圆形的基板W的外周圆对应的圆周上沿着圆周隔开均等的间隔(若如本实施方式那样为4个卡盘销26,则以90°间隔)而配置。多个卡盘销26是由收纳于旋转底座21内的省略图示的连杆机构联动地驱动。基板保持部20通过使多个卡盘销26各自与基板W的外周端抵接来握持基板W,从而能够将该基板W以接近保持面21a的水平姿势保持在旋转底座21的上方(参照图3),并且能够使多个卡盘销26各自离开基板W的外周端而解除握持。
在通过利用多个卡盘销26进行握持而使基板保持部20保持基板W的状态下,旋转马达22使旋转轴24旋转,由此能够使基板W绕旋转轴CX旋转,该旋转轴CX沿着穿过基板W的中心的铅垂方向。
处理液供给部30是在喷嘴臂32的前端安装喷出喷嘴31而构成的(参照图2)。喷嘴臂32的基端侧固定地连结于喷嘴基台33。喷嘴基台33能够通过省略图示的马达而绕沿着铅垂方向的轴转动。通过喷嘴基台33转动,如图2中的箭头AR34所示,喷出喷嘴31在基板保持部20的上方的处理位置与比处理杯40靠外侧的待机位置之间沿水平方向以圆弧状移动。
处理液供给部30以供给多种处理液的方式构成。具体而言,处理液供给部30具有多个喷出喷嘴31。在图2及图3的例子中,作为喷出喷嘴31,示出了2个喷出喷嘴31a、31b。喷出喷嘴31a、31b经由喷嘴臂32而固定在喷嘴基台33上。因此,喷出喷嘴31a、31b彼此同步地移动。喷出喷嘴31a、31b以在水平面内相邻的方式设置。
如图3所例示的那样,喷出喷嘴31a经由配管34a而与处理液供给源37a连接,喷出喷嘴31b经由配管34b而与处理液供给源37b连接。在配管34a、34b的中途,分别设置有开闭阀35a、35b。通过打开开闭阀35a,来自处理液供给源37a的处理液Lq1流经配管34a的内部而从喷出喷嘴31a喷出,通过打开开闭阀35b,来自处理液供给源37b的处理液Lq2流经配管34b的内部而从喷出喷嘴31b喷出。从喷出喷嘴31a例如喷出SC1液,从喷出喷嘴31b例如喷出纯水。喷出喷嘴31a、31b以在处理位置停止的状态喷出的处理液Lq1、Lq2着落于由基板保持部20保持的基板W的上表面。
也可以在配管34a、34b的中途分别设置有回吸阀(suck back valve)36a、36b。回吸阀36a在处理液Lq1的喷出停止时,吸入配管34a内的处理液Lq1,由此从喷出喷嘴31a的前端引入处理液Lq1。由此,在喷出停止时不易产生处理液Lq1从喷出喷嘴31a的前端以相对较大的块(液滴)的形式落下的滴落。回吸阀36b也同样。
另外,在本实施方式的处理单元1中,除了所述的处理液供给部30以外,还设置有2个处理液供给部60、65。本实施方式的处理液供给部60、65具有与上述的处理液供给部30同样的结构。即,处理液供给部60是在喷嘴臂62的前端安装喷出喷嘴61而构成,该喷出喷嘴61通过与喷嘴臂62的基端侧连结的喷嘴基台63,而如箭头AR64所示,在基板保持部20的上方的处理位置与比处理杯40靠外侧的待机位置之间以圆弧状移动。同样地,处理液供给部65是在喷嘴臂67的前端安装喷出喷嘴66而构成,该喷出喷嘴66通过与喷嘴臂67的基端侧连结的喷嘴基台68,而如箭头AR69所示,在基板保持部20的上方的处理位置与比处理杯40靠外侧的待机位置之间以圆弧状移动。处理液供给部60、65也可以以供给多种处理液的方式构成,或者也可以以供给单一的处理液的方式构成。
处理液供给部60、65在各自的喷出喷嘴61、66位于处理位置的状态下,向由基板保持部20所保持的基板W的上表面喷出处理液。此外,处理液供给部60、65的至少一者也可以为,将纯水等清洗液与经加压的气体混合而生成液滴并将该液滴与气体的混合流体喷射至基板W的二流体喷嘴。另外,设置于处理单元1的处理液供给部不限定于3个,只要为一个以上即可。然而,在本实施方式中,由于是以依次切换喷出两种处理液为前提的,因而喷出喷嘴总体设置有两个以上。处理液供给部60、65的各喷出喷嘴也可以与处理液供给部30同样地经由配管而与处理液供给源连接,另外,在该配管的中途设置有开闭阀,进而设置有回吸阀。以下,代表性地对使用处理液供给部30的处理进行描述。
处理杯40是以包围基板保持部20的方式设置的。处理杯40具有内杯41、中杯42以及外杯43。内杯41、中杯42以及外杯43是以可升降的方式设置的。于内杯41、中杯42以及外杯43上升的状态下,从基板W的周缘飞散的处理液触碰内杯41的内周面而落下。落下的处理液适当地由第一回收机构(未图示)回收。在内杯41下降且中杯42以及外杯43上升的状态下,从基板W的周缘飞散的处理液触碰中杯42的内周面而落下。落下的处理液适当地由第二回收机构(未图示)回收。在内杯41以及中杯42下降且外杯43上升的状态下,从基板W的周缘飞散的处理液触碰外杯43的内周面而落下。落下的处理液适当地由第三回收机构(未图示)回收。由此,能够将不同的处理液分别适当地回收。
分隔板15以在处理杯40的周围将腔室10的内侧空间上下分隔的方式设置。分隔板15可以为包围处理杯40的一片板状构件,也可以将多个板状构件接合而成。另外,在分隔板15上,也可以形成有沿厚度方向贯通的通孔或缺口,在本实施方式中,形成有用于供支撑轴穿插的通孔(未图示),所述支撑轴用于支撑处理液供给部30、60、65的喷嘴基台33、63、68。
分隔板15的外周端与腔室10的侧壁11连结。另外,分隔板15的包围处理杯40的端缘部是以成为直径比外杯43的外径更大的圆形形状的方式形成的。因此,分隔板15不会妨碍外杯43的升降。
另外,在腔室10的侧壁11的一部分且底壁13的附近设置有排气管道18。排气管道18连通连接于省略图示的排气机构。从风扇过滤单元14供给而在腔室10内流下的清洁空气中,经过处理杯40与分隔板15之间的空气从排气管道18排出至装置外。
相机70设置在腔室10内且分隔板15的上方。相机70例如具有拍摄元件(例如CCD(Charge Coupled Device:电荷耦合元件))、电子快门、透镜等光学系统。通过喷嘴基台33,处理液供给部30的喷出喷嘴31在由基板保持部20保持的基板W的上方的处理位置(图3的实线位置)与比处理杯40靠外侧的待机位置(图3的虚线位置)之间往返移动。处理位置为从处理液供给部30向由基板保持部20所保持的基板W的上表面喷出处理液来进行清洗处理的位置。待机位置为处理液供给部30在不进行清洗处理时停止喷出处理液而待机的位置。在待机位置,也可以设置有收纳处理液供给部30的喷出喷嘴31的待机盒。
相机70以在其拍摄区域中至少包含处理位置的喷出喷嘴31的前端的方式设置。更具体而言,以喷出喷嘴31的前端以及从该前端喷出的处理液包含于拍摄区域的方式设置相机70。在本实施方式中,如图3所示,在对处理位置的喷出喷嘴31从前上方进行拍摄的位置设置相机70。因此,相机70能够拍摄包含处理位置的喷出喷嘴31的前端的拍摄区域。同样地,相机70也可以拍摄包含处理位置的处理液供给部60、65的喷出喷嘴61、66的前端的拍摄区域。此外,在将相机70设置于图2所示的位置时,对于处理液供给部30、65的喷出喷嘴31、66而言,由于在相机70的拍摄视场内横向移动,因而可适当拍摄处理位置附近的移动,而对于处理液供给部60的喷出喷嘴61而言,由于在相机70的拍摄视场内沿纵深方向移动,因而也有可能无法适当拍摄处理位置附近的移动量。此时,也可以与相机70分开地设置处理液供给部60专用的相机。
另外,如图3所示,在腔室10内且分隔板15的上方设置有照明部71。通常,腔室10内为暗室,因而在相机70进行拍摄时,照明部71对处理位置附近的处理液供给部30、60、65的喷出喷嘴31、61、66照射光。相机70所生成的拍摄图像输出至控制部9。
控制部9控制基板处理装置100的各种结构而进行对基板W的处理。另外,控制部9对由相机70所生成的拍摄图像进行图像处理。控制部9通过该图像处理来求出从各喷出喷嘴喷出处理液的开始时刻与停止时刻之间的时间差。关于该图像处理,将于下文中详述。
作为控制部9的硬件的结构与通常的计算机相同。即,控制部9包括:进行各种运算处理的CPU(Central Processing Unit:中央处理单元)、存储基本程序的读取专用的存储器即ROM(Read Only Memory:只读存储器)、存储各种信息的自由读写的存储器即RAM(Random Access Memory:随机存取存储器)以及预先存储控制用软件或数据等的磁盘等。通过控制部9的CPU执行规定的处理程序(program),从而使基板处理装置100的各动作机构由控制部9所控制,进行基板处理装置100的处理。另外,通过控制部9的CPU执行规定的处理程序,来进行图像处理。此外,控制部9的功能的一部分或全部也可以由专用的硬件来实现。
用户界面90具有显示器及输入部。显示器例如为液晶显示器或有机EL(ElectroLuminescence:电致发光)显示器。输入部例如为触控面板、鼠标或键盘。该用户界面90与控制部9连接。显示器基于来自控制部9的显示信号来进行显示图像的显示。在该显示图像上,例如包含来自相机70的拍摄图像。输入部将由用户所输入的输入信息输出至控制部9。控制部9能够根据输入信息来控制各种结构。
<控制部的动作>
图4为示出控制部9的动作的一个示例的流程图。此处,作为一个示例,对使用处理液供给部30的处理进行说明。首先,在步骤S1中,通过主搬运机器人103将基板W搬运至基板保持部20上。基板保持部20保持搬运来的基板W。
接着,在步骤S2中,控制部9使喷嘴基台33转动,使喷出喷嘴31a、31b移动至处理位置。在喷出喷嘴31a、31b在处理位置停止的状态下,喷出喷嘴31a的前端及喷出喷嘴31b的前端包含于相机70的拍摄区域。
接着,在步骤S3中,控制部9控制相机70开始拍摄。由此,相机70能够更可靠地拍摄喷出喷嘴31a的前端及喷出喷嘴31b的前端。相机70以规定的帧率(例如60帧/秒)对拍摄区域进行拍摄,并将所生成的拍摄图像的各帧依次输出至控制部9。此外,也可以以步骤S2的喷出喷嘴31a、31b的移动开始为契机而开始该相机70的拍摄。
图5为概略性地示出由相机70生成的拍摄图像的帧IM1的一个示例的图。在图5所例示的帧IM1中,拍摄到喷出喷嘴31a的前端及喷出喷嘴31b的前端,并且还拍摄到基板W的一部分。在帧IM1中,尚未从喷出喷嘴31a喷出处理液Lq1,同样地,也尚未从喷出喷嘴31b喷出处理液Lq2。
接着,在步骤S4中,控制部9使从喷出喷嘴31a的喷出开始。具体而言,控制部9将开信号输出至开闭阀35a。开闭阀35a基于该开信号进行打开动作而打开配管34a。由此,来自处理液供给源37a的处理液从喷出喷嘴31a喷出,供给到基板W的上表面。此外,从输出开信号起至实际喷出处理液Lq1为止会产生延迟时间。该延迟时间取决于由开闭阀35a的打开动作而导致的阀体的移动速度、配管34a的配管长度以及压力损失等各种因素。
另外,控制部9在即将进行步骤S4之前使旋转马达22旋转来使基板W旋转。
图6为概略性地示出由相机70生成的拍摄图像的帧IM2的一个示例的图。在图6所例示的帧IM2中,从喷出喷嘴31a喷出处理液Lq1,未从喷出喷嘴31b喷出处理液Lq2。从喷出喷嘴31a喷出的处理液Lq1为所谓的连续流,在从喷出喷嘴31a的前端至基板W的上表面为止的区域中,具有沿铅垂方向延伸的液柱形状。该处理液Lq1着落于基板W的大致中央,受到伴随基板W的旋转的离心力而在基板W的上表面扩展。然后,从基板W的周缘飞散。由此,处理液Lq1作用于基板W的整个上表面,进行基于处理液Lq1的处理。
控制部9例如在从步骤S4起经过规定时间后,在步骤S5中将喷出处理液的喷嘴从喷出喷嘴31a切换为喷出喷嘴31b。即,控制部9停止从喷出喷嘴31a喷出处理液Lq1,并且开始从喷出喷嘴31b喷出处理液Lq2。即,控制部9向开闭阀35a发送闭信号并且向开闭阀35b发送开信号。作为具体的一个示例,控制部9在从步骤S4起的经过时间达到第一基准时间时,将开信号输出至开闭阀35b,在从步骤S4起的经过时间达到第二基准时间时,将闭信号输出至开闭阀35a。例如,第二基准时间可设定得比第一基准时间长。
开闭阀35b基于开信号来进行打开动作,以打开配管34b。由此,来自处理液供给源37b的处理液Lq2从喷出喷嘴31b喷出,着落于基板W的上表面。此外,从输出开信号起至实际喷出处理液Lq2为止,会产生延迟时间。该延迟时间取决于由开闭阀35b的打开动作导致的阀体的移动速度、配管34b的配管长度以及压力损失等各种因素。
开闭阀35a基于闭信号来进行关闭动作,以关闭配管34a。此外,在设置有回吸阀36a时,控制部9向回吸阀36a发送吸入信号。回吸阀36a基于该吸入信号进行吸入动作,吸入配管34a内的处理液。开闭阀35a的关闭动作与回吸阀36a的吸入动作彼此同时执行。由此,将喷出喷嘴31a的前端侧的处理液Lq1拉回,适当地停止处理液Lq1的喷出。此外,从输出闭信号起至实际停止喷出处理液Lq1为止,会产生延迟时间。该延迟时间取决于由开闭阀35a的关闭动作导致的阀体的移动速度、回吸阀36a的阀体的移动速度、配管34a的配管长及压力损失等各种因素。
图7及图8概略性地示出由相机70生成的拍摄图像的帧的一个示例。图7及图8中分别例示的帧IM3、帧IM4表示从喷出喷嘴31a切换为喷出喷嘴31b时的帧。帧IM3为开闭阀35a、35b分别正在进行关闭动作及打开动作时候的帧。因此,在帧IM3中,从喷出喷嘴31a及喷出喷嘴31b两者分别正在喷出处理液Lq1、处理液Lq2。然而,从喷出喷嘴31a喷出的处理液Lq1的宽度比帧IM2窄。这是因为,通过开闭阀35a的关闭动作使处理液Lq1的流量变小。在帧IM3中,开闭阀35b尚未完全打开,因此,从喷出喷嘴31b喷出的处理液Lq2的宽度也窄。
帧IM4为开闭阀35a关闭且开闭阀35b打开的状态下的帧。因此,在帧IM4中,未从喷出喷嘴31a喷出处理液Lq1,正从喷出喷嘴31b喷出处理液Lq2。从喷出喷嘴31b喷出的处理液Lq2也为连续流,且在从喷出喷嘴31b的前端至基板W的上表面为止的区域中,具有沿铅垂方向延伸的液柱形状。该处理液Lq2着落于基板W的大致中央,受到伴随基板W的旋转的离心力而在基板W的上表面扩展。然后,从基板W的周缘飞散。由此,处理液Lq2作用于基板W的整个上表面,进行基于处理液Lq2的处理。
当从步骤S5起经过规定时间后,在步骤S6中,控制部9停止从喷出喷嘴31b喷出处理液Lq2。作为具体的一个示例,控制部9在从向开闭阀35b输出开信号的时间点起的经过时间达到第三基准时间时,向开闭阀35b发送闭信号。开闭阀35b基于该闭信号进行关闭动作,以关闭配管34b。此外,在设置有回吸阀36b时,向回吸阀36b发送吸入信号。由此,回吸阀36b与开闭阀35a的关闭动作同时地进行吸入动作,吸入配管34b内的处理液Lq2。由此,适当地停止从喷出喷嘴31b喷出处理液Lq2。此外,此时,在从信号的输出起至处理液Lq2的喷出实际结束为止,会产生延迟时间。
控制部9也可以在步骤S6之后停止旋转马达22的旋转,使基板W的旋转停止。或者,控制部9也可以使旋转马达22的旋转速度增大,通过旋转力使基板W上的处理液Lq2从基板W的周缘飞散而使基板W干燥后,使旋转马达22的旋转停止。
接着,在步骤S7中,控制部9结束相机70的拍摄。接着,在步骤S8中,控制部9控制喷嘴基台33,使喷出喷嘴31a、31b移动至待机位置。
通过以上的动作,能够依次进行使用处理液Lq1、Lq2的一系列处理。
另外,如图4所例示那样,控制部9为了监视处理液的喷出/停止时刻,与步骤S4~步骤S6同时地在步骤S10中进行监视处理。该监视处理为监视步骤S5中的、开始从喷出喷嘴31b喷出处理液Lq2的开始时刻tb与停止从喷出喷嘴31a喷出处理液Lq1的停止时刻ta之间的时间差是否合适的处理。
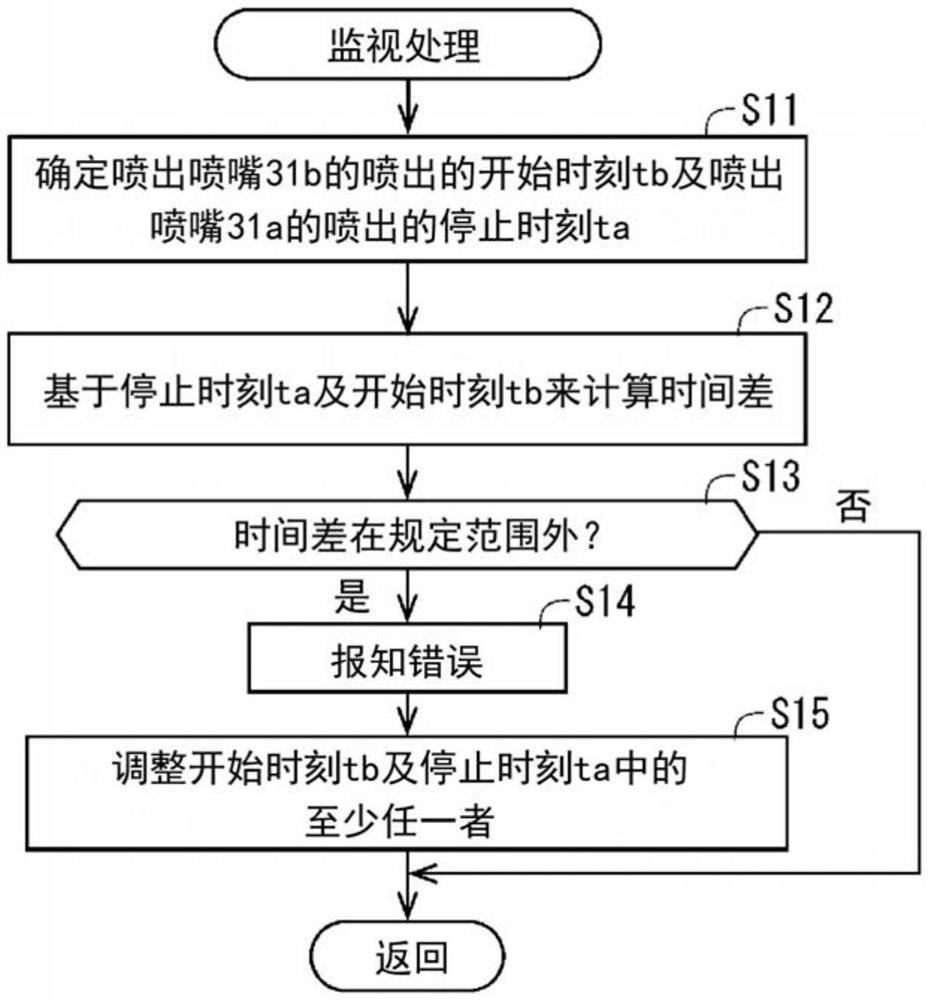
图9为示出监视处理的具体动作的一个示例的流程图。首先,控制部9对由相机70生成的拍摄图像进行图像处理,确定喷出喷嘴31b的开始时刻tb以及喷出喷嘴31a的停止时刻ta(步骤S11)。
此处,首先对喷出喷嘴31b的开始时刻tb进行描述。当从相机70输入帧时,控制部9从该帧切出喷出判定区域Rb1。此处所说的喷出判定区域Rb1,是拍摄图像的各帧中从喷出喷嘴31b的前端向处理液Lq2的喷出方向延伸的区域(也参照图5至图8)。此处,处理液Lq2向铅垂下方延伸,因此喷出判定区域Rb1具有在拍摄图像的纵向上延伸的长条形状(例如矩形状)。喷出判定区域Rb1的横向的宽度设定得比处理液Lq2的宽度宽,喷出判定区域Rb1的纵向的长度设定为喷出判定区域Rb1不包含处理液Lq2的着落位置的程度的长度。
此外,未从喷出喷嘴31b喷出处理液Lq2时的喷出判定区域Rb1内的像素值、与从喷出喷嘴31b喷出处理液Lq2时的喷出判定区域Rb1内的像素值不同。图10及图11为概略性地示出喷出判定区域Rb1内的横向的亮度分布的一个示例的图。图10中例示了未喷出处理液Lq2时的亮度分布,图11中例示了正喷出处理液Lq2时的亮度分布。
在正喷出处理液Lq2时,在喷出判定区域Rb1内拍摄到该处理液Lq2的液柱部分。在照明光从与相机70的拍摄方向相同的方向入射时,处理液Lq2的液柱的表面看起来明亮地发光。因此,如图11所例示那样,相当于该液柱部分的亮度比周围的亮度高。具体而言,亮度分布在液柱部分上具有向上凸出的形状。即,亮度分布具有由处理液Lq2的液柱形状所引起的特征。
另一方面,在未喷出处理液Lq2时,在喷出判定区域Rb1内未拍摄到处理液Lq2的液柱形状。因此,如图10所例示那样,亮度分布当然不具有由该处理液Lq2的液柱形状所引起的特征。该亮度虽根据基板W的上表面的图案所引起的漫反射、或腔室10内部部件的映入等而变动,但具有相对一致的分布。
此外,相机70可以为生成灰度(gray scale)的拍摄图像的类型的相机,也可以为生成彩色的拍摄图像的类型的相机。在前者的情况下,可以说拍摄图像的像素值表示亮度值。以下,列举生成灰度的拍摄图像的类型的相机为例进行说明,但彩色的情况下只要根据像素值计算亮度值,并使用该亮度值即可。
控制部9基于喷出判定区域Rb1内的像素值,来判定是否正从喷出喷嘴31b喷出处理液Lq2。具体而言,控制部9计算喷出判定区域Rb1内的像素值的统计量A2。统计量A2为反映从喷出喷嘴31b的处理液Lq2的喷出状态的值,例如为喷出判定区域Rb1内的像素值的总和(积分值)。其原因在于,正喷出处理液Lq2时的像素值的总和大于未喷出处理液Lq2时的像素值的总和。
作为统计量A2,也可以采用像素值的方差来代替像素值的总和。其原因在于,如图10及图11所示,与未喷出处理液Lq2时的亮度分布相比,喷出处理液Lq2时的亮度分布不均一。作为方差,例如可采用标准偏差。另外,也可以采用针对喷出判定区域Rb1内的所有像素值的方差。
另一方面,处理液Lq2具有沿着铅垂方向的液柱形状,因此喷出判定区域Rb1中的纵向的亮度分布的变动小。因此,也可以将沿横向排列成一列的像素切出,采用该多个像素值的方差。或者,也可以将沿纵向排列成一列的像素值以每列进行积分来计算积分像素值,采用所得的每列的积分像素值的方差。
作为判定的示例,设定关于统计量A2的阈值th1,在统计量A2为阈值th1以上时,可判定为正从喷出喷嘴31b喷出处理液Lq2,在统计量A2小于阈值th1时,可判定为未从喷出喷嘴31b喷出处理液Lq2。该阈值th1可以预先通过实验或模拟等来设定。
图12为示出图4的步骤S4~步骤S6中的统计量A2的时间变化的一个示例的图。在图12中,横轴表示相机70生成的拍摄图像的帧编号,纵轴表示统计量。帧编号随着时间的经过而增大,因此也可以说横轴表示时间。关于喷出判定区域Rb1的统计量A2是以虚线表示的,关于后述的喷出判定区域Ra1的统计量A1是以实线表示的。
在图12中,统计量A2在初期小于阈值th1。其原因在于,在处理的最初,喷出喷嘴31b未喷出处理液Lq2(参照图4的步骤S4)。在步骤S5中切换喷出喷嘴时,统计量A2增大而超过阈值th1。即,统计量A2从小于阈值th1的状态过渡至大于阈值th1的状态。统计量A2超过阈值th1的时刻相当于开始时刻tb。因此,可以基于统计量A2的变化来确定开始时刻tb。以下进行详细说明。
控制部9对每帧计算统计量A2,并对每帧判定该统计量A2是否大于阈值th1。而且,控制部9将其判定结果存储在存储介质中。当在前一次的帧中统计量A2小于阈值th1,且在本次的帧中统计量A2大于阈值th1时,控制部9判定统计量A2超过阈值th1。
控制部9基于前一次的帧与本次的帧来确定开始时刻tb。即,控制部9基于统计量A2小于阈值th1的前一次的帧以及作为该帧的下一帧且统计量A2大于阈值th1的本次的帧,来确定开始时刻tb。例如,控制部9可将前一次的帧的生成时刻确定为开始时刻tb,或者,也可以将本次的帧的生成时刻确定为开始时刻tb,或者,也可以将前一次与本次的帧的生成时刻的平均确定为开始时刻tb。
接着,对喷出喷嘴31a的停止时刻ta进行描述。控制部9在输入有帧时,从该帧切出喷出判定区域Ra1。此处所说的喷出判定区域Ra1,是拍摄图像的各帧中从喷出喷嘴31a的前端向处理液Lq1的喷出方向延伸的区域(也参照图5至图8)。此处,处理液Lq1向铅垂下方延伸,因而喷出判定区域Ra1具有在拍摄图像的纵向上延伸的长条形状(例如矩形状)。喷出判定区域Ra1的横向的宽度设定为比处理液Lq1的宽度宽,喷出判定区域Rb1的纵向的长度设定为喷出判定区域Rb1不包含处理液Lq1的着落位置的程度的长度。
与喷出判定区域Rb1同样地,喷出判定区域Ra1内的亮度分布根据有无喷出处理液Lq1而不同。因此,与判定有无喷出处理液Lq2同样地,控制部9基于喷出判定区域Ra1的像素值来判定有无喷出处理液Lq1。更具体而言,控制部9计算喷出判定区域Ra1内的像素值的统计量A1。统计量A1与统计量A2同样地,为反映从喷出喷嘴31a的处理液Lq1的喷出状态的值,例如为喷出判定区域Ra1内的像素值的总和或方差。
在统计量A1大时,可判定为正从喷出喷嘴31a喷出处理液Lq1,在统计量A1小时,可判定为未从喷出喷嘴31a喷出处理液Lq1。因此,设定用于这些判定的关于统计量A1的阈值。此处,采用关于统计量A2的阈值th1作为关于统计量A1的阈值。此外,也可以采用与阈值th1不同的值作为关于统计量A1的阈值。
如图12所例示那样,统计量A1在初期大于阈值th1。其原因在于,从处理的最初开始喷出处理液Lq1(参照图4的步骤S4)。然后,在步骤S5中切换喷出喷嘴时,统计量A1降低而低于阈值th1。统计量A1低于阈值th1的时刻相当于停止时刻ta。因此,可基于统计量A1的变化来确定停止时刻ta。以下,进行详细说明。
控制部9对每帧计算统计量A1,并对每帧判定该统计量A1是否大于阈值th1。而且,控制部9将其判定结果存储在存储介质中。当在前一次的帧中统计量A1大于阈值th1,且在本次的帧中统计量A1小于阈值th1时,控制部9判定统计量A1低于阈值th1。
而且,控制部9基于前一次的帧和本次的帧来确定停止时刻ta。即,控制部9基于统计量A1大于阈值th1的前一次的帧以及作为该帧的下一帧且统计量A2小于阈值th1的本次的帧,来确定停止时刻ta。例如,控制部9可将前一次的帧的生成时刻确定为停止时刻ta,或者,可将本次的帧的生成时刻确定为停止时刻ta,或者,也可以将前一次与本次的帧的生成时刻的平均确定为停止时刻ta。
接着,在步骤S12中,控制部9计算开始时刻tb与停止时刻ta之间的时间差。具体而言,控制部9将停止时刻ta减去开始时刻tb来计算时间差。
接着,在步骤S13中,控制部9判定该时间差是否在规定范围外。规定范围例如可以预先设定,并存储在存储介质中。规定范围的下限值及上限值例如具有正值。
当时间差在规定范围外时,在步骤S14中,控制部9执行错误的报知处理。例如,控制部9使错误显示在用户界面90的显示器上。或者,在设置有蜂鸣器(buzzer)或扬声器(speaker)等声音输出部时,控制部9也可以使声音输出部输出错误。用户界面90的显示器及声音输出部为报知部的一个示例。总而言之,控制部9使该报知部报知错误。通过这样的报知,作业人员能够认识到时间差处于规定范围外。
接着,在步骤S15中,控制部9以使时间差处于规定范围内的方式调整开始时刻tb及停止时刻ta中的至少任一者。
在时间差大于规定范围的上限值时,为了减小时间差而限制于规定范围内,控制部9例如将喷出喷嘴31b的开始时刻tb更新为更迟的时刻。作为更具体的一个示例,控制部9以使时间差处于规定范围内的方式,将规定开闭阀35b的打开时刻的第二基准时间更新为更长的值,并将更新后的第二基准时间存储在存储介质中。由此,在下一次以后的步骤S5的切换时,向开闭阀35b输出开信号的时刻延后,因而开始时刻tb延后。因此,能够将下一次以后的步骤S5(针对下一基板的步骤S5)中的时间差减小而设定在规定范围内。
由此,处理液Lq1的喷出的停止时刻ta并未变更,因而关于处理液Lq1的处理期间的长度并未变更。因此,能够适当地进行利用处理液Lq1的处理。
或者,控制部9也可以将喷出喷嘴31a的停止时刻ta更新为更早的时刻。作为更具体的一个示例,控制部9以使时间差处于规定范围内的方式,将规定开闭阀35a的关闭时刻的第一基准时间更新为更短的值,并将更新后的第一基准时间存储在存储介质中。由此,在下一次以后的步骤S5的切换时,向开闭阀35a输出闭信号的时刻提早,因而停止时刻ta提早。因此,能够将下一次以后的步骤S5中的时间差减小而设定在规定范围内。
另外,也可以调整开始时刻tb及停止时刻ta两者来减小时间差。
此外,在时间差大于规定范围的上限值时,喷出处理液Lq1、Lq2两者的重叠(overlap)期间长。即,喷出至基板W的处理液的总量暂时增大。由此,例如可能产生处理液Lq2与基板W上的处理液Lq1碰撞而使处理液的一部分在基板W上飞溅的溅液。在第一实施方式中,在时间差大于规定范围的上限值时,可将下一次以后的步骤S5中的时间差限制在规定范围内。因此,通过采用不产生溅液那样的值作为规定范围的上限值,能够大致避免溅液的产生。
另一方面,在时间差小于规定范围的下限值时,为了使时间差增大而限制在规定范围内,控制部9例如将喷出喷嘴31b的开始时刻tb更新为更早的时刻。作为更具体的一个示例,控制部9以使时间差处于规定范围内的方式,将规定开闭阀35b的打开时刻的第二基准时间更新为更短的值,并将更新后的第二基准时间存储在存储介质中。由此,能够将下一次以后的步骤S5中的时间差增大而设定在规定范围内。
由此,处理液Lq1的喷出的停止时刻ta未变更,因而关于处理液Lq1的处理期间的长度未变更。因此,能够适当地进行利用处理液Lq1的处理。
或者,控制部9也可以将喷出喷嘴31a的停止时刻ta更新为更迟的时刻。作为更具体的一个示例,控制部9以使时间差处于规定范围内的方式,将规定开闭阀35a的关闭时刻的第一基准时间更新为更长的值,并将更新后的第一基准时间存储在存储介质中。由此,也可以将下一次以后的步骤S5中的时间差增大而设定在规定范围内。
另外,也可以调整开始时刻tb及停止时刻ta两者来增大时间差。
此外,当时间差小于规定范围的下限值时,喷出处理液Lq1、Lq2两者的重叠期间变短。即,在处理液Lq1的喷出几乎停止的状态下开始喷出处理液Lq2。由于基板W正在旋转,因而供给到其上表面的处理液Lq1受到离心力而移动至基板W的周缘侧。因此,若在未喷出处理液Lq2的状态下处理液Lq1的喷出量变少,则基板W的上表面的处理液Lq1减少,从而基板W可能局部地干燥(液干涸)。尤其,在处理液Lq1的着落位置附近,基板W的上表面可能局部地干燥。这样的干燥可能会导致基板W的上表面出现不良状况(例如颗粒的附着等),因而不优选。在第一实施方式中,即使在时间差小于规定范围的下限值时,也能够将下一次以后的步骤S5中的时间差限制在规定范围内。因此,通过将规定范围的下限值设定为不产生基板W的局部干燥的值,能够大致避免基板W的局部干燥的产生。
如以上那样,根据第一实施方式,在时间差在规定范围外时,调整至规定范围内。因此,能够大致避免因时间差处于规定范围外所导致的不良状况(溅液及液干涸)的产生。
另外,根据第一实施方式,通过针对来自相机70的拍摄图像的图像处理,来确定喷出喷嘴31b的开始时刻tb及喷出喷嘴31a的停止时刻ta。即,能够基于实际的处理液Lq1、Lq2的喷出状态来确定开始时刻tb及停止时刻ta,因而能够提高其确定精度。而且,基于以高精度确定的时刻来计算时间差,因而时间差的计算精度也高。因此,能够以更高的精度将时间差限制在规定范围内。
另外,由于使用喷出判定区域Ra1、Rb1的像素值,因而与对整个拍摄图像进行图像处理时相比可以减轻处理。
另外,能够基于统计量与阈值th1的大小的比较来求出时间差,因而处理简易。
此外,在上述的示例中,将规定范围的上限值设定为不产生溅液的程度的值,将下限值设定为不产生液干涸的程度的值。然而,根据其他因素等,也可以将上限值设定为更小的值,也可以将下限值设定为更大的值。例如,该时间差有时对针对基板W的处理结果是否良好造成影响。此时,也可以通过实验或模拟等来设定时间差的规定范围的上限值及下限值,以使处理结果变得良好。
由于多个处理单元1的制造偏差等,关于喷出控制的延迟时间对于每个处理单元1而言可能不同。然而,通过控制部9对每个处理单元1进行上述动作,能够对每个处理单元1将时间差调整至规定范围内。以往,为了对每个处理单元1调整开始时刻tb及停止时刻ta,对每个处理单元1变更基板W的处理程式(recipe)信息。由此,处理程式信息的管理变得复杂。在第一实施方式中,即使采用共同的处理程式信息,也可以对每个处理单元1以最适的时间差进行处理,能够实现稳定的处理性能。
另外,在上述示例中,在开始从喷出喷嘴31b喷出处理液Lq2后,停止从喷出喷嘴31a喷出处理液Lq1。图13为示出统计量的时间变化的另一个示例的图。在图13的例子中,在喷出喷嘴31a的停止时刻ta之后出现喷出喷嘴31b的开始时刻tb,其时间差相对较大。在这种情况下,由于在喷出处理液Lq2之前基板W的上表面的处理液Lq1减少,因而基板W可能局部地干燥。
在该情况下,在步骤S12中通过从停止时刻ta减去开始时刻tb而得的时间差具有负值。因此,该时间差小于规定范围的下限值,在步骤S13中,控制部9判定为时间差在规定范围外。因此,在步骤S15中,控制部9以使时间差处于规定范围内的方式调整开始时刻tb及停止时刻ta中的至少任一者。因此,能够在下一次以后的步骤S5中将时间差设定在规定范围内。
另外,上述的说明可以理解为针对基板W的处理时的动作,也可以理解为设置基板处理装置100时等进行的初始设定时的动作。即,若在初始设定时,设定临时的时刻来对基板W实际进行处理,则在该临时的时刻不合适时,设定合适的时刻。
<用户界面>
在上述的示例中,控制部9判定时间差是否在规定范围外。然而,也可以由作业人员进行判定。以下,进行具体说明。
控制部9使表示统计量A1、A2的时间变化的图显示在用户界面90的显示器上。优选控制部9使阈值th1也显示在该图上。具体而言,控制部9使图12或图13所示的图显示在显示器上。由此,作业人员能够目视确认统计量A1、A2的时间变化,从而能够判定时间差的大小。
用户界面90的输入部接受用于调整开始时刻tb及停止时刻ta的输入。例如,作业人员在判定为时间差大于规定范围的上限值时,对输入部进行用于使开始时刻tb延后的输入及用于提早停止时刻ta的输入中的至少任一者。输入部将该输入信息输出至控制部9。控制部9根据输入信息来调整开始时刻tb及停止时刻ta中的至少任一者。在作业人员判定为时间差小于规定范围的下限值时也同样。
如以上那样,作业人员能够目视确认统计量A1、A2的时间变化,并基于该时间变化来调整时间差。
<机器学习>
在上述的示例中,控制部9基于像素值的统计量来求出开始时刻tb与停止时刻ta之间的时间差,但未必限于此。控制部9也可以在监视处理中通过机器学习来求出开始时刻tb与停止时刻ta之间的时间差。
图14为概略性地示出控制部9的内部结构的一个示例的图。控制部9具有分类器91及机器学习部92。对于分类器91,依次输入有来自相机70的拍摄图像的各帧。分类器91将所输入的各帧分类成与喷出喷嘴31a、31b的喷出/停止有关的以下四个类别(category)C1~C4。类别也可以称为类(class)。
四个类别C1~C4为表示图5至图8中分别示出的喷出状态的类别。更具体而言,类别C1为表示喷出喷嘴31a、31b两者未喷出处理液的状态(图5)的类别,类别C2为表示仅喷出喷嘴31a正喷出处理液的状态(图6)的类别,类别C3为表示喷出喷嘴31a、31b两者正喷出处理液的状态(图7)的类别,类别C4为表示仅喷出喷嘴31b正喷出处理液的状态(图8)的类别。
该分类器91是使用多个教学数据通过机器学习部92而生成的。即,该分类器91也可以说是经机器学习的分类器。机器学习部92例如使用近邻法、支持向量机(supportvector machine)、随机森林(random forest)或神经网络(neural network)(包含深度学习)等作为机器学习的算法。
教学数据包含学习数据以及表示将该学习数据分类至哪一类别的标签。学习数据是由相机70所拍摄的拍摄图像的帧,是预先生成的。对各学习数据赋予有正确的类别作为标签。该赋予可通过作业人员对例如用户界面90的操作来进行。机器学习部92基于这些教学数据进行机器学习来生成分类器91。
作为一个示例,对通过近邻法将帧分类的分类器91进行说明。分类器91具有特征向量提取部911、判定部912以及存储有判定数据库913的存储介质。对于特征向量提取部911,依次输入有来自相机70的拍摄图像的各帧。特征向量提取部911按照规定的算法来提取帧的特征向量。该特征向量为容易表示与喷出喷嘴31a、31b的喷出状态相应的特征量的向量。该算法可以采用公知的算法。特征向量提取部911将该特征向量输出至判定部912。
在判定数据库913中,存储有通过机器学习部92而由多个教学数据生成的多个特征向量(以下称为基准向量),该基准向量分类成各类别C1~C4。具体而言,机器学习部92对多个教学数据适用与特征向量提取部911相同的算法而生成多个基准向量。另外,机器学习部92对该基准向量赋予教学数据的标签(正确类别)。
判定部912基于从特征向量提取部911输入的特征向量以及存储于判定数据库913的多个基准向量来对帧进行分类。例如,判定部912也可以确定特征向量最接近的基准向量,并将帧分类至所确定的基准向量的类别(最近邻法(nearest neighbor algorithm))。由此,判定部912能够将输入至分类器91(特征向量提取部911)的帧分类至类别C1~C4中的一个。
控制部9通过分类器91对各帧进行分类,并基于该分类结果而求出喷出喷嘴31b的开始时刻tb与喷出喷嘴31a的停止时刻ta之间的时间差。
图15为示出监视处理中的控制部9的动作的一个示例的流程图。在步骤S40中,作为图像处理,控制部9通过机器学习来确定开始时刻tb及停止时刻ta。
图16为概略性地示出拍摄图像的多个帧F的一个示例的图。在图16的例子中,将帧F按时间数列排列配置。在此,变更帧的附图标记是为了便于说明,帧F与上述的帧IM1~IM4为同种帧。
如图16所例示那样,在基板处理装置100的动作初期,喷出喷嘴31a、31b均未喷出处理液。因此,图16所例示的帧F[1]~F[k]由分类器91分类至类别C1。
接着,当从喷出喷嘴31a喷出处理液Lq1时(步骤S4),如图16所例示那样,随后的帧F[k+1]~F[m]由分类器91分类至类别C2。
接着,将喷出处理液的喷嘴从喷出喷嘴31a切换为喷出喷嘴31b(步骤S5)。即,从喷出喷嘴31b喷出处理液Lq2。因此,如图16所例示那样,随后的帧F[m+1]~F[n]由分类器91分类至类别C3。接着,停止从喷出喷嘴31a喷出处理液Lq1。因此,如图16所例示那样,随后的帧F[n+1]以后的帧,即直到从喷出喷嘴31b的处理液Lq2的喷出结束为止的帧由分类器91分类至类别C4。
如以下详细叙述的那样,控制部9基于各帧的分类结果来确定开始时刻tb及停止时刻ta。
即,控制部9基于对喷出喷嘴31b分类为停止(类别C2)的第m个帧F[m]以及帧F[m]之后的第(m+1)个帧即对喷出喷嘴31b分类为喷出(类别C3)的帧F[m+1],来确定喷出喷嘴31b的开始时刻tb。例如,控制部9可以将帧F[m]的生成时刻确定为开始时刻tb,也可以将帧F[m+1]的生成时刻确定为开始时刻tb,或者也可以将帧F[m]、帧F[m+1]的生成时刻的平均确定为开始时刻tb。
同样地,控制部9基于对喷出喷嘴31a分类为喷出(类别C3)的第n个帧F[n]以及帧F[n]之后的第(n+1)个帧即对喷出喷嘴31a分类为停止(类别C4)的帧F[n+1],来确定喷出喷嘴31a的停止时刻ta。例如,控制部9可以将帧F[n]的生成时刻确定为停止时刻ta,也可以将帧F[n+1]的生成时刻确定为停止时刻ta,或者也可以将帧F[n]、帧F[n+1]的生成时刻的平均确定为停止时刻ta。
如上所述,根据控制部9,能够通过机器学习来判定(分类)喷出喷嘴31a、31b的喷出状态。因此,能够以高精度将各帧分类。进而,能够以高精度求出停止时刻ta与开始时刻tb之间的时间差。
确定停止时刻ta及开始时刻tb之后的步骤S41~S44分别与第一实施方式的步骤S12~S15相同。
此外,在停止喷出喷嘴31a的喷出之前开始喷出喷嘴31b的喷出时,喷出处理液Lq1、Lq2两者的重叠期间相当于时间差。因此,在该情况下,控制部9也可以基于分类至类别C3的帧数来计算时间差。例如,控制部9也可以将帧间的时间乘以帧数来计算时间差。
<向分类器的输入>
在上述的示例中,作为输入分类器91的输入数据,采用拍摄图像的各帧F的整个区域,但是并不一定限定于此。例如,控制部9也可以将帧F中分别表示喷出判定区域Ra1、Rb1的图像切出,将该图像输入分类器91。此时,作为输入机器学习部92的学习数据,也采用分别表示喷出判定区域Ra1、Rb1的图像。
由此,分类器91能够将与喷出状态的关联性低的区域的影响去除来进行分类,因此能够提高其分类精度。进而,能够提高开始时刻tb及停止时刻ta的确定精度。另外,若使用喷出判定区域Ra1、Rb1,则与通过分类器91对整个拍摄图像的帧进行处理的情况相比,能够减轻处理。
此外,分类器91也可以针对喷出判定区域Ra1、Rb2的每个图像而将喷出状态分类。即,分类器91也可以基于喷出判定区域Ra1的图像,将该图像分类为以下两个类别Ca1、Ca2。即,类别Ca1表示喷出喷嘴31a未喷出处理液Lq1的状态,类别Ca2表示喷出喷嘴31a正喷出处理液Lq1的状态。同样地,分类器91也可以基于喷出判定区域Rb2的图像,将该图像分类为以下两个类别Cb1、Cb2。即,类别Cb1表示喷出喷嘴31b未喷出处理液Lq2的状态,类别Cb2表示喷出喷嘴31b正喷出处理液Lq2的状态。
控制部9能够基于包含分类为类别Cb1的图像的帧以及包含该图像的下一图像即分类为类别Cb2的图像的帧,来确定喷出喷嘴31b的开始时刻tb。喷出喷嘴31a的停止时刻ta也同样。
另外,作为输入分类器91的输入数据,例如也可以采用在各个喷出判定区域Ra1、Rb1中横向排列成一列的像素的像素值组。其原因在于,如图10及图11所示,沿横向排列的像素的像素值组根据有无喷出处理液而变化。或者,作为分类器91的输入数据,也可以采用包含每列的积分值的积分值组,所述每列的积分值为在各个喷出判定区域Ra1、Rb1中沿纵向排列成一列的像素值的总和。
<多个分类器>
图17为概略性地示出控制部9的内部结构的一个示例的功能框图。控制部9除了具有多个分类器91这点以外,与图14相同。这些多个分类器91也通过机器学习部92生成。
例如,机器学习部92针对处理液Lq1、Lq2的每个种类而生成多个分类器91。在图17的例子中,示出了3个分类器91A~91C作为多个分类器91。分类器91A~91C为使用不同的教学数据生成的分类器。
例如,采用利用某种处理液Lq1、Lq2进行处理时的拍摄图像的各帧作为学习数据。机器学习部92基于包含该学习数据的教学数据来生成分类器91A。由此,能够生成该处理液Lq1、Lq2的种类的组(以下称为第一组)用的分类器91A。同样地,机器学习部92基于使用与第一组不同的第二组的处理液Lq1、Lq2的教学数据,生成第二组用的分类器91B,并基于使用种类与第一组及第二组均不同的第三组的处理液Lq1、Lq2的教学数据,生成第三组用的分类器91C。
在图17的示例中,特征向量提取部911及判定部912在分类器91A~91C中共同地设置,该分类器91A~91C由判定数据库913区分。总之,机器学习部92分别生成第一组用的判定数据库913A~第三组用的判定数据库913C,由此生成分类器91A~91C。在判定数据库913A中,记录有使用第一组的处理液Lq1、Lq2时的基准向量,并且记录有其正确的类别。判定数据库913B、913C也同样。
用户界面90与判定部912连接。作业人员将处理液Lq1、Lq2的种类输入用户界面90。图18是示出显示在用户界面90的显示器上的输入画面90a的一个示例的图。在输入画面90a上,显示有与处理液Lq1、Lq2有关的表901。在该表901中,显示有处理液的种类、流量、基板W的旋转速度以及处理时间。表901的各种信息可通过由作业人员对输入部进行的输入来变更。例如,通过点击(或触摸)表901的该部分,能够输入该部分的信息。例如,通过该点击,在该部分以下拉形式显示有多个信息,能够通过作业人员选择其中的一个来输入信息。
在图18所例示的输入画面90a中,也显示有用于选择基板W的种类的软键(softkey)902。作业人员通过点击或触摸软键902,能够选择软键902。作为基板W的种类,例如有硅(Si)基板及碳化硅(SiC)基板等。除此以外,也可以能够根据有无在基板W的上表面形成膜、或者形成在基板W的上表面的膜的种类(例如SiO2、SiN、TiN等)来选择判定数据库。
另外,在图18所例示的输入画面90a中,示出了显示由相机70生成的拍摄图像的区域903。由此,作业人员能够目视确认相机70的拍摄图像。
用户界面90将由作业人员输入的输入信息(处理液Lq1、Lq2的种类等)输出至判定部912。
特征向量提取部911提取所输入的帧的特征向量,并将该特征向量输出至判定部912。判定部912选择与成为处理对象的处理液Lq1、Lq2的种类相应的判定数据库913。判定部912使用所输入的特征向量以及所选择的判定数据库913的基准向量,来对帧进行分类。
由此,使用与处理液Lq1、Lq2的种类相应的分类器91来对帧进行分类,因而能够提高帧的分类精度。进而,能够提高时间差的计算精度。
此外,在上述的示例中,针对每个处理液Lq1、Lq2的种类而生成分类器91,但例如也可以针对每个基板W的种类或每个处理液Lq1、Lq2的流量而生成分类器91。另外,例如相机70的拍摄图像中的喷出喷嘴的位置可能不同。例如,在拍摄图像中,处理液供给部30的喷出喷嘴31的位置关系与处理液供给部65的喷出喷嘴66的位置关系可能不同。此时,也可以针对每个喷出喷嘴的位置来生成分类器91。另外,这些情况也可以组合。例如,也可以生成与处理液Lq1、Lq2的组的种类及基板W的种类相应的分类器91。例如,在处理液Lq1、Lq2的组的种类有N种,基板W的种类有M种的情况下,也可以生成与其组合相应的(N×M)个分类器91。
用户界面90只要接受选择分类器91所需要的信息(处理液Lq1、Lq2的种类、基板W的种类、处理液Lq1、Lq2的流量以及喷出喷嘴的位置中的至少任一者)的输入,并将该输入信息输出至控制部9即可。
另外,选择分类器91所需要的信息未必需要由作业人员输入。例如,有时从基板处理装置100的上游侧将关于基板W的基板信息发送至控制部9,在该基板信息中包含这些信息。在该情况下,控制部9只要基于基板信息内的该信息来选择分类器91即可。
<服务器>
在上述的示例中,设置于基板处理装置100的控制部9利用机器学习生成分类器91,通过该分类器91对帧进行分类。然而,也可以在服务器中设置由该控制部9进行的机器学习功能的至少一部分。
图19是概略性地示出基板处理系统的电气结构的一个示例的功能框图。基板处理系统具有基板处理装置100及服务器200。如图19所例示那样,基板处理装置100的控制部9经由通信部93而与服务器200通信。通信部93为通信界面,且可通过有线或无线而与服务器200通信。
在图19的示例中,服务器200具有机器学习部210以及存储有判定数据库220的存储介质。机器学习部210具有与机器学习部92相同的功能,能够基于教学数据生成判定数据库220。判定数据库220与判定数据库913相同。
判定部912将请求判定数据库220的请求信号经由通信部93发送至服务器200。服务器200根据该请求信号,向通信部93发送判定数据库220。由此,判定部912能够利用保存在服务器200中的判定数据库220。此外,在该情况下,未必需要机器学习部92及判定数据库913。
另外,在上述的示例中,判定部912设置于基板处理装置100的控制部9,但也可以将判定部912设置于服务器200。此时,特征向量提取部911将特征向量经由通信部93发送至服务器200。服务器200基于所接收的特征向量及判定数据库220,对帧进行分类,并将其分类结果发送至通信部93。通信部93将该分类结果输出至控制部9。
另外,在上述的示例中,特征向量提取部911设置于基板处理装置100的控制部9,但也可以将特征向量提取部911设置于服务器200。即,也可以将分类器91自身设置于服务器200。在该情况下,控制部9将由相机70生成的拍摄图像的帧经由通信部93发送至服务器200。服务器200从该帧提取特征向量,并使用所提取的特征向量以及判定数据库220对该帧进行分类,将其分类结果发送至通信部93。通信部93将该分类结果输出至控制部9。
根据上述的形态,在服务器200中设置有判定处理功能,因而能够对多个基板处理单元进行共同的判定。
此外,服务器200的机器学习部210也可以针对每个处理液Lq1、Lq2的种类、每个基板W的种类、每个处理液Lq1、Lq2的流量以及每个喷出喷嘴31a、31b的位置中的至少一者,来生成判定数据库220。此时,控制部9只要将指定应使用的判定数据库220的信息经由通信部93发送至服务器200即可。
总之,只要由基板处理装置100以及服务器200整体发挥下述功能即可,即,使用经机器学习的分类器将拍摄图像所包含的各帧分类至各类别,并基于其分类结果来求出时间差。
<深度学习>
作为机器学习,也可以采用深度学习。图20示出神经网络(包含深度学习)NN1的模型。在该模型中,设置有输入层、中间层(隐藏层)及输出层。各层具有多个节点(人工神经元(artificial neuron)),在各节点中,分别加权输入有其前段的层的节点的输出数据。即,在各节点中,分别输入有对前段的节点的输出乘以各自的加权系数而得的相乘结果。各节点输出例如公知的函数的结果。中间层的层数不限于1,可任意设定。
机器学习部92通过基于教学数据进行学习,来决定用于各节点间的加权的加权系数。该加权系数作为判定数据库而被存储。由此,机器学习部92实质上能够生成分类器91。
在输入层中,输入有由相机70生成的帧F。分类器91使用存储于判定数据库的各加权系数,基于帧F从输入层经由中间层进行输出层的运算处理,由此计算帧F相当于各类别C1~C4的概率。而且,分类器91将帧分类至概率最高的类别。
如以上那样,能够通过神经网络对帧进行分类。在神经网络中,分类器91自动生成特征量,因而设计者无需决定特征向量。
此外,也可以在神经网络中也生成多个分类器91。例如,机器学习部92也可以使用处理液Lq1、Lq2的每个种类的教学数据进行机器学习,生成每个种类各自的判定数据库(加权系数)。
分类器91根据来自用户界面90的输入信息来确定处理液Lq1、Lq2的种类,使用与该种类相应的判定数据库对帧F进行分类。由此,能够提高分类精度。
当然,不限于处理液Lq1、Lq2的种类,也可以针对每个基板W的种类、每个处理液Lq1、Lq2的流量以及每个喷出喷嘴31a、31b的位置中的至少一者来生成分类器91。
第二实施方式
第二实施方式的基板处理装置100的结构的一个示例与第一实施方式相同,其动作的一个示例如图4所示。然而,监视处理的具体例与第一实施方式不同。在第二实施方式中,控制部9对由相机70拍摄的拍摄图像进行图像处理,由此检测从喷出喷嘴31a切换为喷出喷嘴31b时产生的溅液。即,在监视处理中,进行是否产生溅液的监视。
图21是示出由相机70生成的拍摄图像的帧的一个示例的图。在图21所例示的帧IM5中,从喷出喷嘴31a、31b分别喷出处理液Lq1、Lq2,产生溅液。该溅液产生在喷出喷嘴31a、31b的着落位置的附近。
由于预先知道产生溅液的区域,所以为了检测该溅液,可以在拍摄图像中设定溅液判定区域R2。具体而言,溅液判定区域R2在拍摄图像的各帧中设定在喷出喷嘴31a、31b的附近。溅液判定区域R2设定在拍摄到基板W的区域内的区域,即与喷出判定区域Ra1、Rb1不重叠的区域。在图21的例子中,溅液判定区域R2具有判定区域R21、R22,这些判定区域设定在喷出喷嘴31a、31b的附近。更具体而言,判定区域R21、R22在拍摄图像的横向上相对于一组喷出喷嘴31a、31b而彼此位于相反侧。在图21的示例中,判定区域R21、R22具有矩形状的形状。
当在判定区域R21、R22内拍摄到溅液时,由于该溅液处的照明光的反射而使判定区域R21、R22内的亮度值的平均值变高,另外,其亮度分布大幅不均一。反过来说,能够基于判定区域R21、R22内的像素值的总和或方差(例如标准偏差),来判定有无产生溅液。因此,控制部9计算判定区域R21的像素值的总和或方差(例如标准偏差)即统计量B1以及判定区域R22的像素值的总和或方差(例如标准偏差)即统计量B2。若该判定区域R21、R22内的像素值的统计量B1、B2变大,则可判定为产生溅液。
图22是示出统计量B1、B2的时间变化的一个示例的图。图22的示例示出了在步骤S5中产生溅液时的统计量B1、B2。如图22所例示那样,在产生溅液时,统计量B1、B2增大而超过阈值th2。反过来说,在统计量B1以及统计量B2中的至少一者大于阈值th2时,可判定为产生溅液。这样的阈值th2例如能够通过实验或模拟等而预先设定。
<控制部9的动作>
控制部9的动作的一个示例与图4的流程图相同。然而,步骤S10中的监视处理的具体内容不同。在第二实施方式中,该监视处理为基于由相机70生成的拍摄图像来监视是否产生溅液的处理。
图23为示出第二实施方式的监视处理的动作的一个示例的流程图。首先在步骤S30中,控制部9将值nn初始化为1。接着,在步骤S31中,控制部9基于第nn个帧F[nn]来判定是否产生溅液。具体而言,控制部9计算帧F[nn]的判定区域R21、R22内的像素值的统计量B1、B2。
接着,控制部9判定统计量B1、B2中的至少任一者是否为阈值th2以上。在统计量B1、B2两者小于阈值th2时,判定为未产生溅液,在步骤S32中,控制部9对值nn加上1来进行更新,对更新后的值nn执行步骤S31。即,在统计量B1、B2两者小于阈值th2时,判定为未产生溅液,进行关于下一帧的步骤S31的判定。
另一方面,在统计量B1、B2中的至少任一者为阈值th2以上时,在步骤S33中,控制部9进行错误的报知处理。例如,控制部9使错误显示在用户界面90的显示器上。或者,在设置有蜂鸣器或扬声器等声音输出部时,控制部9也可以使声音输出部输出错误。通过这样的报知,作业人员可认识到产生溅液。
接着,在步骤S34中,控制部9调整开始时刻tb及停止时刻ta中的任一者。即,在统计量B1、B2中的至少任一者为阈值th2以上时,判定为检测到溅液,控制部9调整时间差。具体而言,以使时间差变小的方式调整开始时刻tb及停止时刻ta中的至少任一者。
时间差的减小量也可以预先设定。即,在步骤S34中,控制部9也可以将时间差以预定的减小量减小。继而,控制部9再次执行图4的动作。此时,当在步骤S31中再次检测到溅液时,在步骤S34中将时间差以所述减小量再次减小。通过重复该一系列动作,而将时间差调整为不产生溅液的值。
如上所述,在第二实施方式中,在检测到产生溅液时,以不产生溅液的方式调整时间差。由此,能够在以后的处理中避免或抑制溅液的产生。
<机器学习>
在上述的示例中,控制部9基于像素值的统计量B1、B2来检测溅液,但未必限于此。控制部9也可以通过机器学习来检测溅液。
控制部9的内部结构的一个示例与图14相同。然而,在第二实施方式中,分类器91将从相机70输入的各帧分类为以下两个类别C11、C12。即,类别C11为表示未产生溅液的状态的类别,类别C12为表示产生溅液的状态的类别。
作为学习数据,采用由相机70拍摄的拍摄图像的帧,对学习数据赋予正确的类别作为标签,由此生成教学数据。机器学习部92基于教学数据生成判定数据库913。
示出该监视处理中的控制部9的动作的一个示例的流程图与图23相同。然而,在步骤S31中,控制部9基于分类器91对帧F[nn]的分类结果来判断有无检测到溅液。具体而言,控制部9在将帧F[nn]分类为类别C11时,判断为未检测到溅液,在将帧F[nn]分类为类别C12时,判断为检测到溅液。
如上所述,利用通过机器学习而生成的分类器91将帧F[nn]分类为类别C11或类别C12。因此,能够以高的分类精度对帧进行分类。进而,能够以高的检测精度检测溅液。
在第二实施方式中,也可以与第一实施方式同样地生成多个分类器91,另外,也可以将分类器91及机器学习部92的一部分或全部设置于服务器200。
变形例
在上述的示例中,利用设置于基板W的铅垂上方的两个喷出喷嘴31a、31b进行处理。然而,未必限于此。图24是示出处理单元1A的结构的一个示例的图。处理单元1A除了有无处理液供给部80以外与处理单元1相同。处理液供给部80具有喷出喷嘴81,该喷出喷嘴81设置于基板W的侧方且比基板W的上表面高的位置。喷出喷嘴81以使处理液着落于基板W的上表面的方式,沿大致水平方向喷出处理液Lq3。该处理液Lq3从喷出喷嘴81的前端以弧状放出,着落于基板W的上表面的大致中央附近。喷出喷嘴81经由配管82而与处理液供给源84连接。在配管82的中途设置有开闭阀83。通过打开开闭阀83,使来自处理液供给源84的处理液Lq3流经配管82的内部而从喷出喷嘴81喷出。
在这样的处理单元1A中,有时使用位于基板W的上方的喷出喷嘴(例如喷出喷嘴31a)以及位于基板W的侧方的喷出喷嘴81,依次将处理液供给到基板W。此处,对下述情况进行说明,即,通过来自喷出喷嘴31a的处理液Lq1对基板W进行处理,然后将喷出处理液的喷嘴从喷出喷嘴31a切换为喷出喷嘴81,通过来自喷出喷嘴81的处理液Lq3对基板W进行处理。
相机70设置在使喷出喷嘴31a、31b、81的前端包含于拍摄区域的位置。相机70拍摄而生成的拍摄图像的各帧依次输出至控制部9。
图25是概略性地示出由相机70生成的拍摄图像的帧IM6的一个示例的图。在帧IM6中,喷出喷嘴31a、81分别喷出处理液Lq1、Lq3。即,帧IM6是在喷出喷嘴31a、81的切换时,在两者喷出处理液的时刻下的帧。
在该帧IM6中,在基板W上产生溅液。该溅液也是由于喷出喷嘴31a、81两者分别喷出处理液Lq1、处理液Lq3而引起的。此外,来自喷出喷嘴81的处理液Lq3从基板W的侧方朝向基板W的中央附近喷出,因而溅液容易相对于基板W的中心而在与喷出喷嘴81相反的一侧产生。
在帧IM6中,设定有喷出判定区域Rc1。该喷出判定区域Rc1设置于从喷出喷嘴81的前端到基板W的着落位置为止的处理液Lq3的喷出路径上,例如从喷出喷嘴81的前端向处理液Lq3延伸的方向延伸。喷出判定区域Rc1例如具有矩形状的形状。
与喷出喷嘴31a、31b同样地,控制部9根据喷出判定区域Rc1内的像素值的统计量的大小来判定有无从喷出喷嘴81喷出处理液Lq3,确定喷出喷嘴81的开始时刻。此处所说的统计量,可采用喷出判定区域Rc1内的像素值的总和或方差。另外,喷出喷嘴81沿横向喷出处理液Lq3,因而该横向的亮度分布的不均一很小,在纵向的亮度分布中出现处理液Lq3的特征。因此,统计量也可以采用沿纵向排列成一列的像素的方差。或者,也可以将沿横向排列的像素的像素值以每行进行积分,采用该每行的积分值的方差。
另外,与第一实施方式同样地,控制部9也确定喷出喷嘴31a的停止时刻。
控制部9计算喷出喷嘴81的开始时刻与喷出喷嘴31a的停止时刻之间的时间差。例如,从停止时刻减去开始时刻来计算时间差。而且,控制部9判定该时间差是否在规定范围外。在时间差处于规定范围外时,控制部9以使时间差处于规定范围内的方式,调整喷出喷嘴31a的停止时刻及喷出喷嘴81的停止时刻中的任一者。
如上所述,在处理单元1A中,也可以调整喷出喷嘴31a的停止时刻与喷出喷嘴81的开始时刻之间的时间差。
此外,也可以与第二实施方式同样地,通过经机器学习的分类器来判定有无从喷出喷嘴81喷出处理液Lq3。
另外,在图25的示例中,设置有溅液判定区域R3。该溅液判定区域R3设置在拍摄到基板W的区域内,且相对于基板W的中心而与喷出喷嘴81相反的一侧的区域。溅液判定区域R3例如具有矩形形状。
与溅液判定区域R2同样地,控制部9基于溅液判定区域R3内的像素值的统计量的大小来判定有无溅液。此处所说的统计量可采用溅液判定区域R3内的像素值的总和或方差。而且,在产生溅液时,控制部9以不产生溅液的方式调整喷出喷嘴81的开始时刻与喷出喷嘴31a的停止时刻之间的时间差。
另外,与第四实施方式同样地,有无溅液的判定也可以通过经机器学习的分类器来判定。
以上,对本基板处理装置的实施方式进行了说明,但本实施方式只要不偏离其主旨,则除了上述实施方式以外能够进行各种变更。上述的各种实施方式及变形例可适当组合来实施。例如,也可以进行第一实施方式及第二实施方式两者,从而进行时间差的监视及溅液的监视两者。
另外,作为基板W,采用半导体基板进行了说明,但不限于此。例如也可以采用光掩模用玻璃基板、液晶显示用玻璃基板、等离子体显示用玻璃基板、FED(Field EmissionDisplay:场发射显示器)用基板、光盘用基板、磁盘用基板或磁光盘用基板等基板。
进而,本实施方式只要是从可移动的喷嘴向基板喷出处理液来进行规定处理的装置即可适用。例如,除了上述实施方式的单片式的清洗处理装置以外,也可以将本实施方式的技术应用于从喷嘴向旋转的基板喷出光阻液来进行抗蚀剂涂布的旋转涂布装置(旋涂机)、从喷嘴向在表面形成有膜的基板的端缘部喷出膜的去除液的装置、或从喷嘴向基板的表面喷出蚀刻液的装置等。
附图标记说明
20:基板保持部、
30、60、65:处理液供给部、
31a:第一喷嘴(喷出喷嘴)、
31b:第二喷嘴(喷出喷嘴)、
70:相机、
90:用户界面、
91、91A~91C:分类器、
100:基板处理装置、
W:基板。
- 基板筒、基板处理装置、基板处理系统、基板处理方法、控制装置及显示元件的制造方法
- 基板处理装置、基板处理系统以及基板处理方法