电机类产品装配后轴承径向游隙测量装置及方法
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及电机类产品装配后轴承径向游隙测量装置及方法,用于测量电机类产品装配后轴承径向游隙。
背景技术
轴承径向游隙是轴承的重要参数,牵引电机类产品组装后的轴承径向游隙是影响电机性能的重要参数,对于性能要求高的电机而言,组装后的轴承游隙值是重要参数。
检测到的相关专利文献:
申请号为CN201711475039.9的专利公开了一种测量轴承径向游隙的装置,它包括测量平台、压紧固定机构、基座、测量表和测量活动臂机构;测量平台上设有用于安装基座的基准孔和用于通过压紧固定机构上端的定位通孔;压紧固定机构包括压紧件和压紧杆,压紧杆可上下滑动的安装在定位通孔内,压紧件与压紧杆的上部匹配连接,压紧件的下端用于压紧固定轴承的内圈;测量活动臂机构安装在所述测量平台的一侧,测量活动臂机构的动力输出端安装所述的测量表,测量表前端的测量头与所述基座对应设置。
申请号为CN201822226793.5的专利公开了一种轴承径向游隙的装置,设备包括:机架、能够对轴承的滚道滴注仪表油的旋转滴油装置、能够令内圈沿其周向旋转的内圈旋转装置、和能够将轴承的内圈固定且对外圈测量径向游隙的测量装置;所述旋转滴油装置、所述内圈旋转装置和所述测量装置均连接于所述机架上。本实用新型提供一种轴承游隙测量设备,以缓解现有技术中存在的轴承的径向游隙测量精度低的技术问题。
申请号为CN201811615674.7的专利公开了一种轴承游隙测量装置,尤其涉及一种轴承游隙测量方法及其设备。轴承游隙测量方法包括S1将轴承的内圈固定;S2沿第一方向推动外圈,令外圈移动至相对内圈固定,记录外圈的第一位置;沿第二方向推动外圈,令外圈移动至相对于内圈固定,记录外圈的第二位置;计算第一数值;S3令外圈旋转第一角度,重复步骤S2;S4重复步骤S3,得到多个第一数值;S5令内圈旋转第二角度,重复步骤S2;S6重复步骤S5,得到多个第一数值;S7计算多个第一数值的平均值。承游隙测量设备包括机架、旋转滴油装置、内圈旋转装置和测量装置。
以上装置均是测量轴承自由游隙的装置,但不能测量电机装配后轴承游隙。
发明内容
本发明提供的电机类产品装配后轴承径向游隙测量装置及方法,实现对电机类产品装配后轴承径向游隙的自动测量,测量精准性高,用时短,且不损害轴承,适用于批量检测,直接显示出所需的测量结果,操作方便简单,测量的安全性和可操作性高。
为达到上述目的,本发明采用的技术方案是:
电机类产品装配后轴承径向游隙测量装置,其特征在于:包括带有移动轮的车架、收纳在车架中且可与电机的转轴同轴连接的延长杆、与延长杆对应的推杆施力组件、位移传感器和对整个测量装置进行控制并显示测量结果的PLC控制器,推杆施力组件和位移传感器分别连接PLC控制器,延长杆与水平设置的转轴同轴连接并与推杆施力组件定位配合,随推杆施力组件的伸长而上升,以带动转轴一端向上抬升,位移传感器设置在转轴被抬升一端的端面上。
优选的,所述的推杆施力组件包括沿垂向装在车架中的伺服推杆、装在伺服推杆上端的托举头,托举头的顶面呈向下凹进的V字型且中线位置开设与延长杆配合的配合槽,与水平设置的转轴同轴连接的延长杆随伺服推杆的伸长而进入配合槽中。
优选的,所述的托举头设置在车架的顶部,配合槽中设置可与延长杆接触的力传感器,伺服推杆和力传感器均与PLC控制器连接。
优选的,所述的位移传感器通过磁力表座定位在待测量的电机类产品上,位移传感器的探测头与转轴被抬升一端的端面接触。
优选的,所述的伺服推杆上端穿出车架的顶面且装有水平设置的推杆过渡板,托举头底部固定有水平设置的中间板,中间板与推杆过渡板通过水平设置的交叉滚子导轨可活动连接,使中间板可沿交叉滚子导轨在推杆过渡板上移动,交叉滚子导轨与连接在转轴上的延长杆垂直。
优选的,所述的PLC控制器装在车架中,包括控制模块和与控制模块连接用于输入控制参数并显示测量结果的触控显示面板,触控显示面板设置在举托头的背后。
优选的,所述的机架上装有PLC控制器的电源开头、用于控制PLC控制器急停关闭的急停开头、用于显示PLC控制器工作状态的状态灯。
电机类产品装配后轴承径向游隙测量方法,采用以上所述的电机类产品装配后轴承径向游隙测量装置进行测量,其特征在于:步骤如下:
第一步:将延长杆同轴连接在水平设置的转轴上,并将位移传感器设置在转轴被抬升一端的端面上;
第二步:将机架移动至延长杆下方,使延长杆与推杆施力组件垂向对齐;
第三步:用PLC控制器控制推杆施力组件动作,使延长杆与推杆施力组件定位配合后上推延长杆,抬升转轴的一端;
第四步:从PLC控制器中读取测量结果。
优选的,“使延长杆与推杆施力组件垂向对齐”具体是指,在将机架移动至延长杆下方后控制推杆施力组件伸长至托举头与延长杆垂向隔开0.5~1cm,然后调整中间板在推杆过渡板的位置,使凹槽与延长杆垂向对齐。
优选的,第三步具体是指:在PLC控制器中设定托举头与延长杆接触压力的起始值和终止值,用配合槽中的力传感器实时感应延长杆与托举头的接触压力,并向PLC控制器发生感应信号,PLC控制器通过感应信号控制伺服推杆的伸长速度和高度,托举头未与延长杆接触时伺服推杆的伸长速度为S1,托举头与延长杆接触且力传感器的感应值未达到托举头与延长杆接触压力的起始值时伺服推杆的伸长速度为S2,力传感器的感应值在托举头与延长杆接触压力的起始值和始止值之间时伺服推杆的伸长速度为S3,S1为S2的三十至六十倍,S2为S3的3至5倍,力传感器的感应值等于托举头与延长杆接触压力的终止值时,伺服推杆的伸长速度为零。
发明的测量原理:
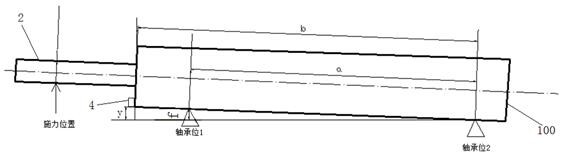
本发明用于测量电机类产品装配后轴承径向游隙,如图1所示,在电机类产品的转轴上连接延长杆,通过推杆施力组件将延长杆上推,由于轴承径向游隙的存在使转轴一端可与延长杆同步被抬升,转轴从水平被抬升至倾斜,使轴承中的内圈与外圈接触,径向游隙间隙减少至零,用位移传感器测量出转轴端面被抬升的高度y,转轴上轴承的轴向长度为a,转轴被抬升端面与轴承内端面的距离为b,根据正切公式可得出轴承的径向游隙f=y×a/b,其中a,b为已知长度,测量出y的值,即可计算出f,实现对电机类产品装配后轴承径向游隙的自动测量。
本发明的有益效果:
1.本发明用延长杆延长转轴长度,用推杆施力组件抬升延长杆,转轴一端与延长杆被同步抬升,转轴从水平逐渐变为倾斜,当轴承径向游隙减少至零时,转轴一端无法再被继续提升,通过测量转轴端面的抬升高度得到轴承径向游隙,测量精准性高,用时短,且不损害轴承,适用于批量检测。
2.整个测量装置通过PLC控制器进行自动控制,测量前设定托举头与延长杆接触压力的起始值和终止值、伺服推杆的伸长速度,用力传感器向PLC控制器发生感应信号,PLC控制器根据收到的感应信号对伺服推杆进行控制,保证测量过程中转轴和轴承内圈被延长杆带动抬升时,轴承内、外圈不会冲撞或挤压,PCL控制器中通过触控显示面板可以设定设定托举头与延长杆接触压力的起始值和终止值,伺服推杆的伸长速度,并直接显示出所需的测量结果,操作方便简单,测量的安全性和可操作性高。
3.伺服推杆上端的推杆过渡板与托举头底部的中间板通过交叉滚子导轨连接,中间板可在推杆过渡板上移动,调整位置以调节托举头的位置,使托举头上的凹槽与延长杆对齐,便于在测量前将延长杆与托举头对齐,提高测量前调节的便利性,测量装置的实用性更高。
附图说明
图1为电机类产品装配后轴承径向游隙测量装置的测量原理图。
图2为电机类产品装配后轴承径向游隙测量装置的结构示图。
图3为电机类产品装配后轴承径向游隙测量装置的主视图。
图4为图3的局部放大图。
具体实施方式
下面结合图1~4对本发明的实施例做详细说明。
电机类产品装配后轴承径向游隙测量装置,其特征在于:包括带有移动轮的车架1、收纳在车架1中且可与电机的转轴100同轴连接的延长杆2、与延长杆2对应的推杆施力组件3、位移传感器4和对整个测量装置进行控制并显示测量结果的PLC控制器5,推杆施力组件3和位移传感器4分别连接PLC控制器5,延长杆2与水平设置的转轴100同轴连接并与推杆施力组件3定位配合,随推杆施力组件3的伸长而上升,以带动转轴100一端向上抬升,位移传感器4设置在转轴100被抬升一端的端面上。
以上所述的电机类产品装配后轴承径向游隙测量装置用于测量电机类产品装配后轴承径向游隙,如图1所示,在电机类产品的转轴100上连接延长杆2,通过推杆施力组件3将延长杆2上推,由于轴承径向游隙的存在使转轴100一端可与延长杆2同步被抬升,转轴从水平被抬升至倾斜,使轴承中的内圈与外圈接触,径向游隙间隙减少至零,用位移传感器测量出转轴端面被抬升的高度y,转轴上轴承的轴向长度为a,转轴被抬升端面与轴承内端面的距离为b,根据正切公式可得出轴承的径向游隙f=y×a/b,其中a,b为已知长度,测量出y的值,即可计算出f,实现对电机类产品装配后轴承径向游隙的自动测量。其中,用延长杆2延长转轴100长度,用推杆施力组件3抬升延长杆2,转轴100一端与延长杆被同步抬升,转轴从水平逐渐变为倾斜,当轴承径向游隙减少至零时,转轴一端无法再被继续提升,通过测量转轴端面的抬升高度得到轴承径向游隙,测量精准性高,用时短,且不损害轴承,适用于批量检测。整个测量装置通过PLC控制器5进行自动控制,测量前设定推杆施力组件3与延长杆2接触压力的起始值和终止值、推杆施力组件3的伸长速度,用力传感器向PLC控制器发生感应信号,PLC控制器根据收到的感应信号对推杆施力组件3进行控制,保证测量过程中转轴和轴承内圈被延长杆带动抬升时,轴承内、外圈不会冲撞或挤压,操作方便简单,测量的安全性和可操作性高。
其中,所述的推杆施力组件3包括沿垂向装在车架1中的伺服推杆31、装在伺服推杆31上端的托举头32,托举头32的顶面呈向下凹进的V字型且中线位置开设与延长杆2配合的配合槽32.1,与水平设置的转轴100同轴连接的延长杆2随伺服推杆31的伸长而进入配合槽32.1中。伺服推杆31带动托举头32上升,与延长杆2配合,抬升延长杆2,使转轴一端也被同步抬升,从而使轴承一端的径向游隙减少,直到轴承一端内圈与外圈接触,径向游隙减少至零,测量轴承端面被抬升的高度,即可得到轴承的径向游隙,测量过程简单,托举头32的配合槽32.1正好用于定位延长杆2,托举头32上升带动延长杆2上抬,托举头32与延长杆2为槽与杆对应配合,抬升力由配合槽32.1传递到延长杆2中,抬升力作用在延长杆2上的长度为配合槽32.1的长度,并非对延长杆2进行点抬升,延长杆2沿长度方向所受的抬升力更均匀,可有效避免延长杆与转轴之间产生夹角,保证抬升过程中延长杆2与转轴100的同轴度,提高测量的精准性。
其中,所述的托举头32设置在车架1的顶部,配合槽32.1中设置可与延长杆2接触的力传感器,伺服推杆31和力传感器均与PLC控制器5连接。力传感器感应延长杆2与托举头32之间的作用力,即托举头32对延长杆的推力,由于轴承径向游隙数值较小,内圈与外圈接触后径向游隙减小至零,但在测量过程中人工并不能判断轴承内圈与外圈接触的时间点,力传感器对托举头32推力实时测量,根据力传感器的数值变化可以判断轴承内圈与外圈已经接触,因此可设定托举头32与延长杆2接触压力的终止值,当力传感器感应值达到终止值时,PCL控制器5即控制伺服推杆停止伸长,停止对延长杆2的抬升,以此时位移传感器的感应数值为图1中的y值。
其中,所述的位移传感器4通过磁力表座定位在待测量的电机类产品上,位移传感器4的探测头与转轴100被抬升一端的端面接触。通过磁力表座将位移传感器定位在待测量的电机类产品上,方便位移传感器4的定位与拆卸,同时也可通过磁力表座来调节位移传感器的探测头位置,保证测量的精准性,提高测量装置的安装便利性和实用性。
其中,所述的伺服推杆31上端穿出车架1的顶面且装有水平设置的推杆过渡板33,托举头32底部固定有水平设置的中间板34,中间板34与推杆过渡板33通过水平设置的交叉滚子导轨35可活动连接,使中间板34可沿交叉滚子导轨35在推杆过渡板33上移动,交叉滚子导轨35与连接在转轴上的延长杆2垂直。中间板34可在推杆过渡板33上移动,调整位置以调节托举头32的位置,使托举头32上的凹槽32.1与延长杆2对齐,便于在测量前将延长杆与托举头对齐,提高测量前调节的便利性,测量装置的实用性更高。
其中,所述的PLC控制器5装在车架1中,包括控制模块和与控制模块连接用于输入控制参数并显示测量结果的触控显示面板51,触控显示面板51设置在举托头32的背后。通过触控显示面板51可以设定设定托举头32与延长杆2接触压力的起始值和终止值,伺服推杆32的伸长速度,并直接显示出所需的测量结果,操作方便简单,测量的安全性和可操作性高。
其中,所述的机架1上装有PLC控制器5的电源开头、用于控制PLC控制器5急停关闭的急停开头、用于显示PLC控制器5工作状态的状态灯。用电源开头来控制PLC控制器5的得电,用急停开头在测量装置误启动或PCL控制器5出现控制错误的时候急停伺服推杆的动作,提高操作安全性。
本发明还保护电机类产品装配后轴承径向游隙测量方法,采用以上所述的电机类产品装配后轴承径向游隙测量装置进行测量,其特征在于:步骤如下:
第一步:将延长杆2同轴连接在水平设置的转轴100上,并将位移传感器4设置在转轴100被抬升一端的端面上;
第二步:将机架1移动至延长杆2下方,使延长杆2与推杆施力组件3垂向对齐;
第三步:用PLC控制器5控制推杆施力组件3动作,使延长杆2与推杆施力组件3定位配合后上推延长杆2,抬升转轴100的一端;
第四步:从PLC控制器5中读取测量结果。
以上所述的电机类产品装配后轴承径向游隙测量方法用于测量电机类产品装配后轴承径向游隙,实现对电机类产品装配后轴承径向游隙的自动测量,用延长杆2延长转轴100长度,用推杆施力组件3抬升延长杆2,转轴100一端与延长杆被同步抬升,转轴从水平逐渐变为倾斜,当轴承径向游隙减少至零时,转轴一端无法再被继续提升,通过测量转轴端面的抬升高度得到轴承径向游隙,测量精准性高,用时短,且不损害轴承,适用于批量检测。通过PLC控制器5进行自动控制,测量前设定推杆施力组件3与延长杆2接触压力的起始值和终止值、推杆施力组件3的伸长速度,用力传感器向PLC控制器发生感应信号,PLC控制器根据收到的感应信号对推杆施力组件3进行控制,保证测量过程中转轴和轴承内圈被延长杆带动抬升时,轴承内、外圈不会冲撞或挤压,操作方便简单,测量的安全性和可操作性高。
其中,“使延长杆2与推杆施力组件3垂向对齐”具体是指,在将机架1移动至延长杆2下方后控制推杆施力组件3伸长至托举头31与延长杆2垂向隔开0.5~1cm,然后调整中间板34在推杆过渡板33的位置,使凹槽32.1与延长杆2垂向对齐。在测量前先使延长杆2与托举头31靠近,并调整托举头的位置,使延长杆2上升后可正好进入至凹槽32.1中,确保延长杆与托举头定位配合的准确性,保证测量顺利进行。
其中,第三步具体是指:在PLC控制器中设定托举头32与延长杆2接触压力的起始值和终止值,用配合槽32.1中的力传感器实时感应延长杆2与托举头3的接触压力,并向PLC控制器5发生感应信号,PLC控制器5通过感应信号控制伺服推杆31的伸长速度和高度,托举头32未与延长杆2接触时伺服推杆31的伸长速度为S1,托举头32与延长杆接触且力传感器的感应值未达到托举头32与延长杆2接触压力的起始值时伺服推杆31的伸长速度为S2,力传感器的感应值在托举头32与延长杆2接触压力的起始值和始止值之间时伺服推杆31的伸长速度为S3,S1为S2的三十至六十倍,S2为S3的3至5倍,力传感器的感应值等于托举头32与延长杆2接触压力的终止值时,伺服推杆31的伸长速度为零。在托举头32未与延长杆2接触时伺服推杆31的伸长速度较大,以节约时间;托举头32与延长杆接触且力传感器的感应值未达到托举头32与延长杆2接触压力的起始值时伺服推杆31的伸长速度变小,减少冲击;力传感器的感应值在托举头32与延长杆2接触压力的起始值和始止值之间时伺服推杆31的伸长速度极小,以使加载过程足够平稳。在力传感器的感应值等于托举头32与延长杆2接触压力的终止值时,伺服推杆31的伸长速度为零,即停止动作,保证不受伤轴承的内、外圈。例如:设定托举头32与延长杆2接触压力的起始值为0.004kN和终止值为0.688kN,S1为60mm/s;S2为1mm/s,S3为速度0.3mm/s。
以上结合附图对本发明的实施例的技术方案进行完整描述,需要说明的是所描述的实施例仅仅是本发明的一部分实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
- 电机类产品装配后轴承径向游隙测量装置及方法
- 一种电机轴承装配径向游隙测量方法及装置