一种小体积的物流无人机用停机系统以及其控制方法
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及无人机技术领域,具体为一种小体积的物流无人机用停机系统以及其控制方法。
背景技术
无人机实际上是无人驾驶飞行器的统称,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,随着无人机在物流运输、农业植保以及军事侦查等领域的应用,无人机在运输货物过程中,需要降落在机场的指定位置并将货物放置在该位置,否者不能完成货物的自主运输,物流无人机在运输过程中停放的机场,由于场地面积和停落准确性的要求,对物流无人机停落的要求就比较高;
但是目前无人机停放系统中同一个停放机场拥有多个停机坪,无法确定停机坪上是否停放有无人机,需要人工现场查看和记录,且无人机的降落前需要查看记录,翻查记录繁琐,工作效率低下,影响无人机的正常降落。
发明内容
本发明提供一种小体积的物流无人机用停机系统以及其控制方法,可以有效解决上述背景技术中提出的无人机停放系统中同一个停放机场拥有多个停机坪,无法确定停机坪上是否停放有无人机,需要人工现场查看和记录,且无人机的降落前需要查看记录,翻查记录繁琐,工作效率低下,影响无人机的正常降落的的问题。
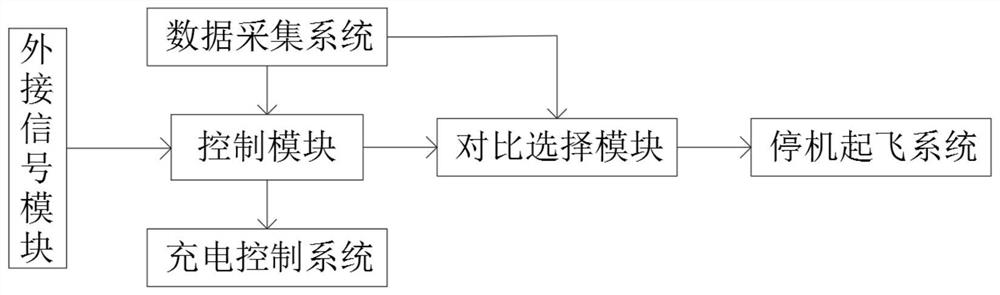
为实现上述目的,本发明提供如下技术方案:一种小体积的物流无人机用停机系统,包括外接信号模块、控制模块、数据采集系统、充电控制系统、对比选择模块和停机起飞系统,所述外接信号模块、数据采集模块和充电控制系统均与控制模块连接,所述控制模块和数据采集模块均与对比选择模块连接,所述对比选择模块与停机起飞系统连接;
所述数据采集系统包括重量检测模块、重量对比模块和数据存储模块,所述重量对比模块的信号输入端和信号输出端分别与重量检测模块和数据存储模块连接;
根据上述技术方案,所述外接信号模块包括信号传输模块、远程摄像模块、外接模块和信号输入模块;
所述远程摄像模块和外接模块均与信号传输模块连接,所述信号输入模块与外接模块连接。
根据上述技术方案,所述对比模块包括数据接收模块和信号选择模块;
所述数据接收模块的信号输出端与信号选择的输入端连接。
根据上述技术方案,所述充电控制系统包括电量检测模块、接头移动模块和充电定时模块;
所述电量检测模块的信号输出端与接头移动模块信号输入端连接,所述接头移动模块与充电定时模块连接。
根据上述技术方案,所述停机起飞系统包括停机坪升降模块、起飞模块和停机自动找正模块;
所述停机坪升降模块的信号输出端分别与起飞模块和停机自动找正模块连接。
根据上述技术方案,所述控制方法包括如下步骤:
S1、通过外接信号模块观察无人机的飞行轨迹并将停机的信号远程输入至控制模块;
S2、通过重量检测模块对现有停机坪上是否停放无人机进行检测,并将检测数据存储;
S3、通过控制模块和数据接收模块选择出没有停放有无人机的停机坪,通过停机坪升降模块将停机坪升至与机场的地面相平齐;
S4、将无人机停放至停机坪上,再利用停机自动找正模块对无人机的机身进行自动校正;
S5、通过充电控制系统对停放的无人机进行电量检测和充电。
根据上述技术方案,所述S1中利用远程摄像模块可以观察无人机的飞行轨迹,工作人员利用外接模块将需要停机的信号通过信号输入模块传输至信号传输模块,进而把停机的信号远程传递至控制模块。
根据上述技术方案,所述S2中通过重量检测模块对现有停机坪的表面进行重量检测,重量对比模块对重量检测的数据进行对比,确定停机坪上没有停放有无人机,并将此信息存储于数据存储模块内部,所述S3中把数据传递至控制模块和数据接收模块,利用信号选择模块选择一个没有停放无人机的停机坪,通过停机坪升降模块带动停机坪向上升起。
根据上述技术方案,所述S4中将无人机停放于升起的停机坪,然后停机自动找正模块会将无人机机身进行校正,然后停机坪升降模块会带着无人机一起下降至机场地面以下,所述停机坪上升和下降的高度范围为1.3-1.5m。
根据上述技术方案,所述S5中通过电量检测模块对无人机剩余的电量进行检测,利用接头移动模块带动充电桩的充电接头移动并与无人机连接,通过充电定时模块对无人机进行充电,并对充电时长进行控制,所述无人机电池充满电量需要的时间为2.5-3h。
与现有技术相比,本发明的有益效果:
1.通过设置有重量检测模块、重量对比模块和数据存储模块,利用重量检测模块可以对机场内所有的停机坪进行检测,停放有无人机的停机坪重量高于闲置停机坪,将停放有无人机的信息传递至数据存储模块,在下一个无人机需要停放时直接调取数据,更加便于确定停机坪的使用情况,同时通过重量对比模块可以将停放的无人机所携带的物流货物的重量进行对比,来确定携带的货物重量,便于记录货物的重量和后续取下货物。
2.通过设置有信号传输模块、远程摄像模块、外接模块和信号输入模块,先利用远程摄像模块对无人机的飞行轨迹时刻进行观察,便于控制停机的时间,通过外接模块和信号输入模块工作人员可以远程将停机的信号传输至控制模块,节约工作时间,提高了工作效率,且远程摄像模块可以对整个停机过程进行监控,避免停机过程出现失误。
3.通过设置有数据接收模块和信号选择模块,对停机坪使用情况进行分析,可以及时选出未停放无人机的停机坪,以供无人机停放,操作简便,在远程即可了解使用数据,且无须工作人员现场去确定,减少了工作量,提高了工作效率,为后续的无人机停放提供了极大的便利。
4.通过设置有停机起飞系统包括停机坪升降模块、起飞模块和停机自动找正模块,可以将停机坪上下升降,在需要停机和起飞时将停机坪升起与机场地面相平齐,便于停机和起飞,无人机停放完成后停机坪下降至机场地面以下,对无人机起到了收纳的作用,避免影响其它的无人机停放和起飞,利用停机自动找正模块可以将停放的无人机机身进行自动校正,使得无人机在停机坪的表面位置可以摆正,便于后续的起飞。
5.通过设置有电量检测模块、接头移动模块和充电定时模块,可以对停放的无人机的剩余电量进行检测,需要充电时即可利用接头移动模块带动充电接头移动与无人机相连,可以及时对无人机电量进行补充,避免无人机电量不足无法正常使用,且充电定时模块可以根据无人机剩余的电量控制充电时间,精确控制充电时间,避免时间和电能的浪费。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
在附图中:
图1是本发明的系统结构示意图;
图2是本发明外接信号模块的结构示意图;
图3是本发明控制方法的步骤流程图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例:如图1-3所示,本发明提供一种技术方案,一种小体积的物流无人机用停机系统,包括外接信号模块、控制模块、数据采集系统、充电控制系统、对比选择模块和停机起飞系统,外接信号模块、数据采集模块和充电控制系统均与控制模块连接,控制模块和数据采集模块均与对比选择模块连接,对比选择模块与停机起飞系统连接;
数据采集系统包括重量检测模块、重量对比模块和数据存储模块,重量对比模块的信号输入端和信号输出端分别与重量检测模块和数据存储模块连接。
外接信号模块包括信号传输模块、远程摄像模块、外接模块和信号输入模块;
远程摄像模块和外接模块均与信号传输模块连接,信号输入模块与外接模块连接。
对比模块包括数据接收模块和信号选择模块;
数据接收模块的信号输出端与信号选择的输入端连接。
充电控制系统包括电量检测模块、接头移动模块和充电定时模块;
电量检测模块的信号输出端与接头移动模块信号输入端连接,接头移动模块与充电定时模块连接。
停机起飞系统包括停机坪升降模块、起飞模块和停机自动找正模块;
停机坪升降模块的信号输出端分别与起飞模块和停机自动找正模块连接。
一种小体积的物流无人机用停机系统的控制方法,控制方法包括如下步骤:
S1、通过外接信号模块观察无人机的飞行轨迹并将停机的信号远程输入至控制模块;
S1中利用远程摄像模块可以观察无人机的飞行轨迹,便于控制停机的时间,工作人员利用外接模块将需要停机的信号通过信号输入模块传输至信号传输模块,进而把停机的信号远程传递至控制模块,节约工作时间,提高了工作效率,且远程摄像模块可以对整个停机过程进行监控,避免停机过程出现失误,提高了停机的安全性;
S2、通过重量检测模块对现有停机坪上是否停放无人机进行检测,并将检测数据存储;
S2中通过重量检测模块对现有停机坪的表面进行重量检测,重量对比模块对重量检测的数据进行对比,确定停机坪上没有停放有无人机,停放有无人机的停机坪重量高于闲置停机坪,并将此信息存储于数据存储模块内部,在下一个无人机需要停放时直接调取数据,更加便于确定停机坪的使用情况,同时通过重量对比模块可以将停放的无人机所携带的物流货物的重量进行对比,来确定携带的货物重量,便于记录货物的重量和后续取下货物;
S3、通过控制模块和数据接收模块选择出没有停放有无人机的停机坪,通过停机坪升降模块将停机坪升至与机场的地面相平齐;
S3中把数据传递至控制模块和数据接收模块,对停机坪使用情况进行分析,利用信号选择模块选择一个没有停放无人机的停机坪,及时选出距离近和未被停放使用的适合的停机坪,以供无人机停放,操作简便,可以在远程即可了解使用数据,且无须工作人员现场去确定,减少了工作量,提高了工作效率,为后续的无人机停放提供了极大的便利,通过停机坪升降模块带动停机坪向上升起,使得无人机可以及时停放至停机坪的表面;
S4、将无人机停放至停机坪上,再利用停机自动找正模块对无人机的机身进行自动校正;
S4中将无人机停放于升起的停机坪,然后停机自动找正模块会将无人机机身进行校正,使得无人机在停机坪的表面位置可以摆正,便于后续的起飞,避免无人机机身歪斜导致无人机在下降收纳过程中碰撞到周围的其它物体,且保证设置的停机坪无须过大,即可将无人机进行保护,可以正常进行停放无人机,然后停机坪升降模块会带着无人机一起下降至机场地面以下,停机坪上升和下降的高度为1.3m,下降的高度高于无人机的机身高度,保证无人机整体收纳于机场地面以下,保证其他无人机起飞和降落时不会碰触到停放完成的无人机,在需要起飞时将停机坪升起与机场地面相平齐,提供无人机起飞跑道,便于无人机起飞;
S5、通过充电控制系统对停放的无人机进行电量检测和充电;
S5中通过电量检测模块对无人机剩余的电量进行检测,需要充电时即可利用接头移动模块带动充电桩的充电接头移动并与无人机连接,且停放完成的无人机经过停机自动找正模块校正过,使得无人机上的充电口可以与充电桩上的充电接头位置相对应,保证接头移动模块带动充电接头移动时可以直接插入无人机的充电口,可以及时对无人机电量进行补充,避免无人机电量不足无法正常使用,通过充电定时模块对无人机进行充电,并对充电时长进行控制,无人机剩余电量不足10%,无人机电池充满电量需要的时间为2.5h,精确控制充电时间,避免时间和电能的浪费。
本发明的工作原理及使用流程:重量检测模块对机场内所有的停机坪进行检测,停机坪上停放有无人机检测的重量数据远高于未停放无人机的数据,利用重量来判断是否停放有无人机,将停放无人机和未停放无人机的停机坪分别记录,将记录输入数据存储模块内,通过远程摄像模块捕捉到机场上空即将停放的无人机,并观察无人机的飞行轨迹,工作人员在室内的控制台上,利用外接模块,把无人机即将停放的信号通过信号输入模块传递至信号传输模块,进而传输至控制模块;
控制模块和数据接收模块提取数据存储模块内部存储的无人机停放记录,利用信号选择模块来选择一个未停放无人机的停机坪,进而通过停机坪升降模块控制停机坪向下升起,无人机即可停放于停机坪的表面,停机自动找正模块对无人机起到了校正的作用,使得无人机摆放与停机坪表面中心位置,然后停机坪升降模块带动无人机一起下降至机场的地面以下,电量检测模块对停放的无人机剩余的电量进行检测,若电量过低,接头移动模块带动充电桩的充电接头向无人机移动,并将充电接头插入无人机的充电口,且无人机的位置被自动校正过,保证充电接头和充电口的连接不会出现失误,充电定时模块根据无人机剩余的电量进行定时,避免充电时间过长。
最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种小体积的物流无人机用停机系统以及其控制方法
- 一种无人机与车辆组合配送的物流控制系统及物流控制方法