一种可以定点投放的机械电子结构
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及无人机搜救技术领域,进一步涉及物资的空投技术,具体涉及一种可以定点投放的机械电子结构。
背景技术
物资空投,是指从飞行器上用伞或其它有效减速装置投放物品的过程,这一过程对投送的准确性和保护性具有较高要求,是利用飞行器输送装备、物资的关键技术环节。
现有技术中,在无人机搜救领域,普遍是靠高清或热像摄像头进行的外围考查和检测,无法真正对伤员起到帮助作用;那么,如果无人机在进行视检的同时,也能够对指定位置进行物资投送,那么有望对发现的遇险人员第一时间进行援助。然而,目前常规的投放方式较为粗放,主要由伞降方式实现,不确定性太大,中途可能造成损失,也很难准确送达遇险人员身边。由此可见,如何提升投放的准确性和有效性,并简化装置结构,成为了亟待解决的技术问题。
发明内容
本发明旨在针对现有技术的技术缺陷,提供一种可以定点投放的机械电子结构,以解决现有技术中物资的常规空投方式准确性、有效性较低的技术问题。
本发明要解决的另一技术问题是如何在保证使用效果的前提下简化此类空投装置的构造。
本发明要解决的再一技术问题是如何通过机械结构和电子设备实现物资的垂直投放。
为实现以上技术目的,本发明采用以下技术方案:
一种可以定点投放的机械电子结构,包括基台,转盘,电机,缆绳,箱体,箱门,舵机,超声波传感器,支撑臂,微动开关,其中,电机固定连接在基台上,在电机的主轴上连接有转盘,缆绳的一端绕接在转盘上,缆绳的另一端与箱体相连接;在箱体的侧壁下端固定连接有舵机,箱门连接在舵机上,所述箱门位于箱体的下端口处,声波传感器固定连接在箱体上;在基台上还固定连接有支撑臂,在支撑臂的下端固定连接有微动开关。
作为优选,所述基台包括上层螺丝,上层主碳板,支撑螺丝,第一内螺纹铝管,中层主碳板,中层螺丝,下层主碳板,下层螺丝,其中第一内螺纹铝管支撑在上层主碳板与中层主碳板之间,上层螺丝向下穿过上层主碳板与第一内螺纹铝管丝接固定,中层螺丝向上穿过中层主碳板与第一内螺纹铝管丝接固定;支撑螺丝的上下两端分别与中层主碳板和下层主碳板相连接;下层螺丝将电机丝接固定在下层主碳板的下端,转盘位于中层主碳板与下层主碳板之间。
作为优选,所述支撑臂包括亚克力支撑板,第二内螺纹铝管,支架螺丝,管套,凸出部,夹持螺丝,钢轴,轴承,碳管,外套环,其中,所述亚克力支撑板有2片,在片亚克力支撑板之间具有若干第二内螺纹铝管,支架螺丝从外端穿过片亚克力支撑板与第二内螺纹铝管丝接固定;在管套上具有凸出部,所述凸出部套接在部分第二内螺纹铝管上;管套有2个,所述2个管套相互对合并由夹持螺丝丝接固定,钢轴的两端分别套接在2个管套中,轴承套接在钢轴上,碳管夹持固定于2个管套中,在碳管的末端固定连接有外套环;支撑螺丝贯穿外套环;微动开关通过热熔胶固定连接在亚克力支撑板的下端。
作为优选,转盘与电机的主轴之间通过AB胶固定连接;超声波传感器通过热熔胶固定连接在箱体的侧壁下端;舵机通过AB胶固定连接在箱体的侧壁下端。
作为优选,所述支撑臂有4个,在每个支撑臂的下端各连接有一个微动开关,所述微动开关顶压在箱体的顶端。
作为优选,还包括单片机,所述单片机分别与微动开关、电机、超声波传感器、舵机通信。
作为优选,所述单片机接收来自微动开关的信息,控制电机的运行状态。
作为优选,所述单片机接收来自超声波传感器的信息,分别控制舵机及电机的运行状态。
作为优选,所述单片机为Arduino nano。
作为优选,还包括电池,所述电池固定连接在所述机械电子结构上,所述电池分别为单片机、微动开关、电机、超声波传感器、舵机供电。
在以上技术方案中,支撑螺丝的丝接固定以及夹持螺丝的丝接固定,需要使用配套的螺母,螺母的具体规格可根据支撑螺丝及夹持螺丝的规格进行适应性选择。
在具体规格方面,上层螺丝可选用M3 8mm螺丝;支撑螺丝可选用M3 45mm螺丝;第一内螺纹铝管可选用30mm规格;中层螺丝可选用M3 8mm螺丝;下层螺丝可选用M4 8mm螺丝;亚克力支撑板可选用5mm规格;第二内螺纹铝管可选用16mm规格;支架螺丝可选用M3 8mm螺丝;管套可采用3D打印获得,也可采用常规方式铸造;夹持螺丝可选用M3 35mm螺丝;钢轴可采用M8 15mm钢轴;轴承可采用内径8mm、外径20mm轴承;碳管可采用内径26mm、外径30mm碳管;电机可采用895电机。
在以上技术方案中,基台用于承载电机及支撑臂;电机一方面用于承载转盘,另一方面对转盘起到驱动作用;转盘上绕接有缆绳,缆绳用于牵引箱体升降;箱门用于对箱体的下端口实现封闭或打开作用,从而卸出箱体内的物资;舵机用于驱动箱门开闭;超声波传感器用于侦测其所处位置到地面的距离,当该距离小于某一预先设定的阈值时,以此作为停止箱体下降并打开箱门的启动条件,从而可以较适宜的高度卸下物资;支撑臂用于承载微动开关,当完成卸货、并将箱体上升归位时,箱体上端对微动开关的顶压,作为停止箱体继续上升的条件。
在基台的具体构造中,上层主碳板、中层主碳板、下层主碳板构建了三层相互平行、间隔的整体结构,在该结构中,上层主碳板和中层主碳板之间由第一内螺纹铝管加以间隔,同时,依靠上层螺丝和中层螺丝从上下两端与第一内螺纹铝管的丝接固定,从而实现了上层主碳板与中层主碳板的固定;中层主碳板与下层主碳板之间由支撑螺丝间隔、固定;下层螺丝用于将电机丝接固定在下层主碳板的底端;中层主碳板与下层主碳板之间的空间用于容纳转盘。
在支撑臂的具体构造中,亚克力支撑板有2片,二者之间由第二内螺纹铝管间隔,在此基础上,由于支架螺丝穿过亚克力支撑板后与第二内螺纹铝管丝接固定,因此将上述结构固定成为整体;该结构的下端用于承载微动开关,上端用于承载管套;管套在其上的固定,是基于凸出部在第二内螺纹铝管上的套接以及亚克力支撑板对凸出部的夹持实现的;两个半壳状管套对合,用于承载碳管;两个管套之间利用夹持螺丝丝接固定,在二者之间设有钢轴和轴承;位于碳管末端的外套环用于同基台固定,这一固定作用是通过支撑螺丝对外套环的贯穿实现的。
在控制机构层面,本发明采用单片机分别与微动开关、电机、超声波传感器、舵机通信。具体来看,本发明采用了两个微动开关、一个超声波传感器、一个电机、一块arduinonano、一块22.2v电池、一块ubec降压模块、一个电机驱动器,两个planner双出轴舵机。
1、IOE-SR05超声波测距模块:通过接收超声波信号输出给arduino nano。
2、启动微动开关:耐压AC1300V 5A,给arduino nano信号,用于启动电机。
3、停止微动开关:耐压AC1300V 5A,给arduino nano信号,用于停止电机。
4、英飞凌大功率驱动芯片BTS7960组成的H桥驱动模块:耐压26v,电流43A,接收arduino nano信号用于控制电机正反转和转速。
5、HENGE 4A开关式UBEC:输入端为7-26v,输出5v 4a,用于给电子元件供电。
6、电池:用于提供电能。
7、Arduino nano:用来接收超声波和微动开关的信号,并发出信号给电机驱动,进而控制电机。
8、Planner双出轴舵机:接收arduino nano的信号,用于打开关闭箱子的下舱门。
连接说明:电池将电源线接到ubec输入口,另外一股接到电机驱动的B+、B-。ubec的输出端一支接到arduino nano的vin和gnd,一支接到超声波传感器的vcc和gnd,一支接到电机驱动器的vcc和gnd,剩下一支接到planner双出轴舵机的vcc和gnd。启动微动开关接arduino nano的d3接口和gnd,停止微动开关接arduino nano的d4接口和gnd。电机接到电机驱动器的M+、M-。电机驱动器的L_EN接arduino nano的d8接口,R_EN接arduino nano的d7接口,LPWM接arduino nano的d6接口,RPWM接arduino nano的d5接口。超声波传感器的EN接gnd,TX接arduino nano的RX0。Planner双出轴舵机的信号线接到arduino nano的d9接口。
机械结构和电路部分靠电机和转盘相连接从而引起关联。
集成模块:
IOE-SR05超声波测距模块用于检测距离地面的距离。
英飞凌大功率驱动芯片BTS7960组成的H桥驱动模块用于控制电机的正反转和转速。
Arduino nano V3.0 ATMEGA328P用于控制电路部分信号发出和接收。
HENGE 4A开关式UBEC功能是降压稳压,用于电路的供电部分。
本发明的工作原理和工作流程如下:当触发启动微动开关时,arduino会发出信号给电机驱动,电机将会启动,转盘上的缆绳将箱体缓缓往下降,箱体上搭载着舵机、箱门和超声波传感器,当快接近地面时,超声波传感器发出信号给arduino主板,arduino主板会发出新的信号给电机驱动,电机停止运作,arduino主板会继续发出信号给舵机,舵机会带动箱门转动,将物资投放出去。过5秒左右,舵机会重新带动箱门反转,2s后arduino发出信号给电机驱动,电机重新带动转盘旋转,通过缆绳将箱体、舵机、箱门和超声波传感器往上移动。当箱体碰到微动开关时,会发出信号给arduino,arduino会发出信号给电机驱动,电机停止运动。流程结束,等待下次触发。
本发明提供了一种可以定点投放的机械电子结构。该技术方案通过飞控中心输出pwm信号给舵机,进而让舵机触发点触开关使单片机接收到信号,然后让电机带动转盘转动,从而利用线缆牵引箱体上下运动。当超声波传感器检测到距离地面达到某一预设值时,电机停止运动,由单片机控制的舵机带动箱体底端的箱门打开,将物资投下。保持一定时间后,舵机关闭箱门,同时由电机驱动转盘及缆绳将箱体上提,箱体碰到机架底部的点触开关之后停止运动。与现有的技术相比,本发明以垂直投放的模式代替了传统的伞降投放模式,具有高精度、高效率、低损失等技术优势。
而且,本发明克服了传统伞降投放过程中每次都存在损耗的问题,本发明在物资投放完毕之后可进行局部零部件的回收,几乎没有多余的物资损耗,因此具有可回收性强的技术优势。
附图说明
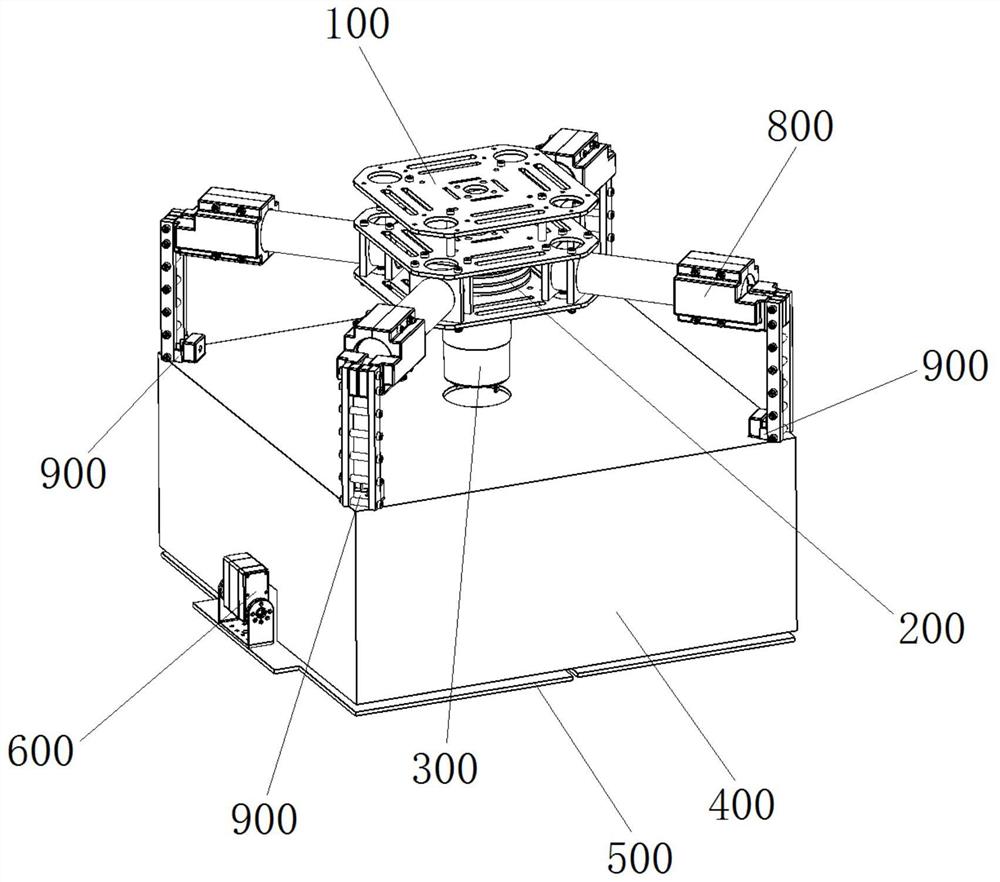
图1是本发明整体结构的立体图;
图2是本发明整体结构的主视图;
图3是本发明整体结构的仰视图;
图4是本发明中基台的立体图;
图5是本发明中转盘的立体图;
图6是本发明中电机的立体图;
图7是本发明中支撑臂的立体图;
图8是本发明中微动开关的立体图;
图9是本发明中箱体及其上机构从一个视角观察的立体图;
图10是本发明中箱体及其上机构从另一个视角观察的立体图;
图11是本发明中基台的爆炸图;
图12是本发明中支撑臂的爆炸图;
图13是本发明的电学连接关系图;
图中:
100、基台 200、转盘 300、电机 400、箱体
500、箱门 600、舵机 700、超声波传感器 800、支撑臂
900、微动开关
1、上层螺丝 2、上层主碳板 3、支撑螺丝 4、第一内螺纹铝管
5、中层主碳板 6、中层螺丝 7、下层主碳板 8、下层螺丝
9、亚克力支撑板 10、第二内螺纹铝管 11、支架螺丝 12、管套
13、凸出部 14、夹持螺丝 15、钢轴 16、轴承
17、碳管 18、外套环。
具体实施方式
以下将对本发明的具体实施方式进行详细描述。为了避免过多不必要的细节,在以下实施例中对属于公知的结构或功能将不进行详细描述。以下实施例中所使用的近似性语言可用于定量表述,表明在不改变基本功能的情况下可允许数量有一定的变动。除有定义外,以下实施例中所用的技术和科学术语具有与本发明所属领域技术人员普遍理解的相同含义。
一种可以定点投放的机械电子结构,如图1~10所示,包括基台100,转盘200,电机300,缆绳,箱体400,箱门500,舵机600,超声波传感器700,支撑臂800,微动开关900,其中,电机300固定连接在基台100上,在电机300的主轴上连接有转盘200,缆绳的一端绕接在转盘200上,缆绳的另一端与箱体400相连接;在箱体400的侧壁下端固定连接有舵机600,箱门500连接在舵机600上,所述箱门500位于箱体400的下端口处,声波传感器700固定连接在箱体400上;在基台100上还固定连接有支撑臂800,在支撑臂800的下端固定连接有微动开关900。
如图11所示,所述基台100包括上层螺丝1,上层主碳板2,支撑螺丝3,第一内螺纹铝管4,中层主碳板5,中层螺丝6,下层主碳板7,下层螺丝8,其中第一内螺纹铝管4支撑在上层主碳板2与中层主碳板5之间,上层螺丝1向下穿过上层主碳板2与第一内螺纹铝管4丝接固定,中层螺丝6向上穿过中层主碳板5与第一内螺纹铝管4丝接固定;支撑螺丝3的上下两端分别与中层主碳板5和下层主碳板7相连接;下层螺丝8将电机300丝接固定在下层主碳板7的下端,转盘200位于中层主碳板5与下层主碳板7之间。
如图12所示,所述支撑臂800包括亚克力支撑板9,第二内螺纹铝管10,支架螺丝11,管套12,凸出部13,夹持螺丝14,钢轴15,轴承16,碳管17,外套环18,其中,所述亚克力支撑板9有2片,在片亚克力支撑板9之间具有若干第二内螺纹铝管10,支架螺丝11从外端穿过片亚克力支撑板9与第二内螺纹铝管10丝接固定;在管套12上具有凸出部13,所述凸出部13套接在部分第二内螺纹铝管10上;管套12有2个,所述2个管套12相互对合并由夹持螺丝14丝接固定,钢轴15的两端分别套接在2个管套12中,轴承16套接在钢轴15上,碳管17夹持固定于2个管套12中,在碳管17的末端固定连接有外套环18;支撑螺丝3贯穿外套环18;微动开关900通过热熔胶固定连接在亚克力支撑板9的下端。
转盘200与电机300的主轴之间通过AB胶固定连接;超声波传感器700通过热熔胶固定连接在箱体400的侧壁下端;舵机600通过AB胶固定连接在箱体400的侧壁下端。
还包括单片机,所述单片机分别与微动开关900、电机300、超声波传感器700、舵机600通信。所述单片机接收来自微动开关900的信息,控制电机300的运行状态。所述单片机接收来自超声波传感器700的信息,分别控制舵机600及电机300的运行状态。所述单片机为Arduino nano。还包括电池,所述电池固定连接在所述机械电子结构上,所述电池分别为单片机、微动开关900、电机300、超声波传感器700、舵机600供电。
本实施例的控制电路如图13所示,采用两个微动开关、一个超声波传感器、一个电机、一块arduino nano、一块22.2v电池、一块ubec降压模块、一个电机驱动器,两个planner双出轴舵机。
1、IOE-SR05超声波测距模块:通过接收超声波信号输出给arduino nano。
2、启动微动开关:耐压AC1300V 5A,给arduino nano信号,用于启动电机。
3、停止微动开关:耐压AC1300V 5A,给arduino nano信号,用于停止电机。
4、英飞凌大功率驱动芯片BTS7960组成的H桥驱动模块:耐压26v,电流43A,接收arduino nano信号用于控制电机正反转和转速。
5、HENGE 4A开关式UBEC:输入端为7-26v,输出5v 4a,用于给电子元件供电。
6、电池:用于提供电能。
7、Arduino nano:用来接收超声波和微动开关的信号,并发出信号给电机驱动,进而控制电机。
8、Planner双出轴舵机:接收arduino nano的信号,用于打开关闭箱子的下舱门。
连接说明:电池将电源线接到ubec输入口,另外一股接到电机驱动的B+、B-。ubec的输出端一支接到arduino nano的vin和gnd,一支接到超声波传感器的vcc和gnd,一支接到电机驱动器的vcc和gnd,剩下一支接到planner双出轴舵机的vcc和gnd。启动微动开关接arduino nano的d3接口和gnd,停止微动开关接arduino nano的d4接口和gnd。电机接到电机驱动器的M+、M-。电机驱动器的L_EN接arduino nano的d8接口,R_EN接arduino nano的d7接口,LPWM接arduino nano的d6接口,RPWM接arduino nano的d5接口。超声波传感器的EN接gnd,TX接arduino nano的RX0。Planner双出轴舵机的信号线接到arduino nano的d9接口。
机械结构和电路部分靠电机和转盘相连接从而引起关联。
集成模块:
IOE-SR05超声波测距模块用于检测距离地面的距离。
英飞凌大功率驱动芯片BTS7960组成的H桥驱动模块用于控制电机的正反转和转速。
Arduino nano V3.0 ATMEGA328P用于控制电路部分信号发出和接收。
HENGE 4A开关式UBEC功能是降压稳压,用于电路的供电部分。
本实施例的工作原理和工作流程如下:当触发启动微动开关900时,arduino会发出信号给电机300驱动,电机300将会启动,转盘200上的缆绳将箱体400缓缓往下降,箱体400上搭载着舵机600、箱门500和超声波传感器700,当快接近地面时,超声波传感器700发出信号给arduino主板,arduino主板会发出新的信号给电机300驱动,电机300停止运作,arduino主板会继续发出信号给舵机600,舵机600会带动箱门500转动,将物资投放出去。过5秒左右,舵机600会重新带动箱门500反转,2s后arduino发出信号给电机300驱动,电机300重新带动转盘200旋转,通过缆绳将箱体400、舵机600、箱门500和超声波传感器700往上移动。当箱体碰到微动开关900时,会发出信号给arduino,arduino会发出信号给电机300驱动,电机300停止运动。流程结束,等待下次触发。
以上对本发明的实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,并不用以限制本发明。凡在本发明的申请范围内所做的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种可以定点投放的机械电子结构
- 一种可以定点投放的机械电子结构