裸晶附接系统及用此系统进行集成精度验证和校准的方法
文献发布时间:2023-06-19 10:52:42
相关申请的交叉引用
本申请要求2018年9月5日提交的美国临时申请No.62/727,447的权益,其内容通过引用合并于此。
技术领域
本发明涉及用于将裸晶/管芯(die)附接到基底的系统和方法,并且更具体地,涉及用于裸晶/管芯附接系统的精度验证和校准的改进系统和方法。
背景技术
与裸晶在基底上的放置(例如,半导体裸晶在基底上的放置)有关,许多常规应用利用“拾取和放置”操作。在这种操作中,从半导体晶片或其他裸晶供应源“拾取”裸晶,以及然后将裸晶移动到(并“放置”在)目标基底上。这种操作还可以利用“拾取”工具和“放置”工具之间的一次或多次转移。
某些裸晶附接应用不利用拾取和放置操作。例如,可以将裸晶供应源(例如,包括多个裸晶的晶片)放置在结合工具和基底之间。可以将包括在裸晶供应源中的裸晶附接到膜等。在结合工具、待附接的裸晶以及基底的放置位置之间对准之后,结合工具将裸晶压靠基底的放置位置。
在完成操作之后倾向于使用与裸晶附接系统分离的设备执行裸晶附接操作的精度。这种精度确定往往是耗时且昂贵的。因此,期望提供用于验证裸晶附接操作的精度以及类似过程的改进系统和方法。
发明内容
根据本发明的示例性实施例,提供了一种裸晶附接系统。该裸晶附接系统包括验证基底,其被构造成接收多个裸晶,该验证基底包括多个基底参考标记。裸晶附接系统还包括成像系统,其用于通过对多个裸晶中的每个裸晶与多个基底参考标记中的相应基底参考标记进行成像来确定多个裸晶与验证基底的对准。
根据本发明的另一示例性实施例,提供了一种操作裸晶附接系统的方法。该方法包括以下步骤:提供构造成接收多个裸晶的验证基底,该验证基底包括多个基底参考标记;以及使用裸晶附接系统的成像系统对多个裸晶中的每个裸晶与多个基底参考标记中的相应基底参考标记进行成像以确定多个裸晶与验证基底的对准。
根据本发明的又一示例性实施例,提供了另一种裸晶附接系统。该裸晶附接系统包括:裸晶供应源,其保持包括第一多个参考标记的裸晶供应形式/构造(form);以及第一运动系统,其用于移动裸晶供应源;结合头,其包括结合工具以及成像系统;第二运动系统,其用于移动结合头;基底,其包括第二多个参考标记;并且其中成像系统被构造为在单个视场中对第一多个参考标记中的参考标记和第二多个参考标记中的参考标记进行成像。
根据本发明的又一示例性实施例,提供了一种校准裸晶附接机的方法。该方法包括以下步骤:提供包括校准裸晶供应的校准裸晶供应形式,该校准裸晶供应包括第一多个参考标记;提供包括结合工具和成像系统的结合头;提供包括第二多个参考标记的基底;以及使用裸晶附接机的成像系统在单个视场中对第一多个参考标记中的参考标记和第二多个参考标记中的参考标记进行成像。
附图说明
当结合附图阅读时,根据以下详细描述可以最好地理解本发明。要强调的是,根据惯例,附图的各种特征未按比例绘制。相反,为了清楚起见,各种特征的尺寸被任意扩大或缩小。
图1A是根据本发明的示例性实施例的裸晶附接系统的元件的框图俯视图;
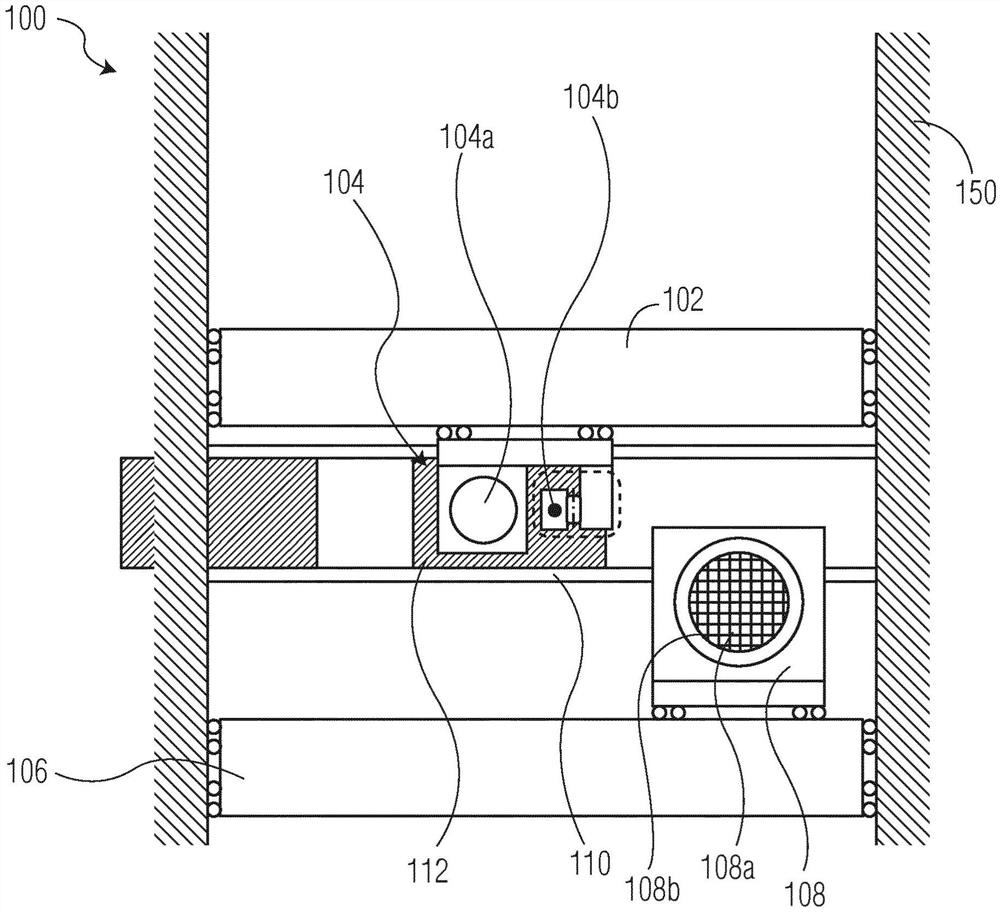
图1B是图1A的裸晶附接系统的元件的侧视图;
图2是根据本发明示例性实施例的验证基底的俯视图;
图3是根据本发明示例性实施例的图2的基底的一部分的俯视图,指示了理想裸晶附接位置;
图4至图6是根据本发明示例性实施例的与裸晶放置精度过程结合使用的验证基底的俯视图;
图7A至图7B是根据本发明示例性实施例的校准操作的俯视图;
图8A至图8B是示出根据本发明示例性实施例的预结合检查操作的俯视图;以及
图9A至图9B是示出根据本发明示例性实施例的校准操作的俯视图。
具体实施方式
如本文中所使用的,术语“裸晶”旨在指代包括(或被配置为在随后的步骤中包括)半导体芯片或裸晶的任何结构。示例性“裸晶”元件包括裸露半导体裸晶(例如裸露LED半导体裸晶)、基底(例如,引线框、PCB、载体、半导体芯片、半导体晶片、BGA基底、半导体元件等)上的半导体裸晶、封装半导体器件、倒装芯片半导体器件、嵌入基底裸晶等。
如上所述,某些裸晶附接应用不利用拾取和放置操作。例如,裸晶供应源(例如,包括多个裸晶的晶片,诸如LED裸晶其他来源的LED晶片)可以定位于结合工具和基底之间。裸晶供应源可以包括附接到膜等的多个裸晶(例如,LED裸晶)。可以使用多种过程来实现将裸晶从裸晶供应源至基底的转移。下面描述两个示例性过程。
根据第一示例性过程,在结合工具、待附接的裸晶以及基底的放置位置对准之后,结合工具将裸晶压靠基底的放置位置。在裸晶的下表面上(和/或在基底的放置位置上)提供粘合剂,使得裸晶现在被固定到基底。这种结合工具可以包括针、多个引脚(例如,可分开致动的引脚)等以用于接触与从裸晶供应源到基底的转移相关的裸晶。
根据第二示例性过程,在结合工具、待附接的裸晶以及基底的放置位置对准之后,激光器或其他光源(例如,其中激光器可以由结合头承载)用于将裸晶从裸晶供应源转移到基底。在裸晶的下表面上(和/或在基底的放置位置上)提供粘合剂,使得裸晶现在被固定到基底。
尽管上面描述了两个示例性过程,但是应当理解,可以预期其他转移过程。无论转移过程如何,本发明的各方面均可用于改进相关的裸晶附接系统和相关过程。
根据本发明的某些示例性实施例,可以例如使用裸晶附接系统的摄像机将精度验证集成到裸晶附接系统中。常规基底或专用基底可用于裸晶附接。专用基底相对于整体基底对准参考具有高局部参考相对精度。示例性的专用基底包括具有光刻施加的参考标记的现有技术玻璃基底,或具有激光雕刻参考的金属基底。裸晶附接系统的摄像机(或其他成像系统)可用于登记附接裸晶相对于其相应基底参考的x、y和θ偏差。通过在同一摄像机图像视场中对基底参考和裸晶两者进行成像,测量误差可以被最小化并且通常仅依赖于摄像机的品质以及基底参考标记的相对精度。
因此,本发明的各方面可以涉及获得x、y和θ偏差数据。可以使用这种偏差数据用于例如:(i)整合关于裸晶附接系统的精度报告;(ii)确定系统偏差并反馈到系统中以提高裸晶附接精度;以及(iii)导出诊断信息以调查与精度相关的不确定性的根本原因。
这与常规系统不同,例如在于与裸晶附接精度相关的验证和校准与用于附接裸晶的系统集成在一起。
与常规系统和方法相比,例如由于不需要额外测量设备(和相关管理)来获得精度数据,因此这是显著改进。由于与裸晶附接系统本身集成,因此可以提供更短校准/验证循环。
现在参考附图,图1A示出了裸晶附接系统100。裸晶附接系统100包括支撑结构110,其用于支撑基底112;裸晶供应源108,其包括多个裸晶108a(其中,多个裸晶108a被设置在被包括作为裸晶供应源108的一部分的膜/箔108b上),所述多个裸晶108a被构造为附接到基底112;以及结合头104,其包括用于在裸晶108a从裸晶供应源108转移到基底112期间中与裸晶108a接触的结合工具104b。裸晶附接系统100还包括结合头支撑件102以及供应支撑件106。结合头支撑件102和供应支撑件106各自安装在机器结构150上,使得结合头支撑件102和供应支撑件106可相对于机器结构150独立地移动。结合头支撑件102支撑可移动结合头104。结合头支撑件102包括用于使结合头104沿x、y方向移动的运动系统(例如,机器人)。结合头104包括与对准和/或检查操作结合使用的摄像机104a(以及其他视觉系统部件)。裸晶供应源108可移动地安装在供应支撑件106上。供应支撑件106包括用于使裸晶供应源108沿x、y方向移动的运动系统(例如,机器人)。在图1A(和图1B)所示的本发明的示例性实施例中,在裸晶附接操作期间,裸晶供应源108定位于结合工具104b和由支撑结构110支撑的基底112之间。
与图1A相比,图1B的侧视图(局部横截面)示出了已经移动到裸晶108a上方的位置处的结合头104(包括摄像机104a和结合工具104b),该裸晶108a又位于基底112上方。两个“结合后”裸晶108a’已经在相应结合位置处附接到基底112并且结合工具104b被示为在基底112上的第三相应结合位置上方接合另一裸晶108a。结合工具104b(例如,包括针,多个引脚等)将裸晶108a压靠在基底112上的第三结合位置上完成另一个转移。
虽然尽管图1A-1B中示出了用于完成多个裸晶108a中的裸晶从膜108b到基底112的转移的结合工具104b,但是可以想到其他类型的转移(例如,上述激光器转移)。
图1A-1B示出了基底112,该基底是与典型的裸晶附接过程结合使用的基底。本发明的各方面利用了与诸如(i)裸晶附接精度验证、(ii)预结合对准、(iii)校准操作等操作结合使用的验证基底。示例性的验证基底在本文中用附图标记“112a”标记。在本发明的示例性实施例中,验证基底112a与裸晶附接机(例如,图1A-1B中所示的裸晶附接机100)结合使用。结合本文描述的某些示例性方法,验证基底112a将位于裸晶附接系统100的支撑结构110上(代替图1A-1B的基底112)。
图2示出了验证基底112a。验证基底112a包括多个局部基底参考标记112a1以及多个整体对准参考标记112a2。验证基底112a可以是玻璃基底、金属基底等。参考标记112a1、112a2可以是光刻施加参考标记、激光雕刻参考标记、以及其他类型的参考标记。可以相对于验证基底112a提供裸晶附接系统(例如裸晶附接系统100)的精度性能(例如,在x、y和θ维度上)。可以使用验证基底112a来转换由裸晶附接系统的摄像机(例如,裸晶附接系统100的摄像机104a)进行的相对测量。这种测量还可以涉及也在图2中示出的参考坐标系200,其中参考坐标系是裸晶附接系统(例如,裸晶附接系统100)的xy坐标系。
图3示出了附接到验证基底112a上的裸晶附接位置处的示例性裸晶108a。更具体地,裸晶108a附接在验证基底112a上的四(4)个局部基底参考标记112a1之间。在图3中,裸晶108a被示出在理想位置。图3针对于裸晶中心108a1示出了定中心于理论理想位置108a2内的裸晶中心108a1(其中,在图3所示的示例中,理想位置108a2处于基底参考标记112a1的中心)。
图4至图6示出了确定(和/或验证)裸晶附接操作的精度的方法的步骤。图4示出了附接到验证基底112a的结合位置(目标位置)的多个裸晶108a。例如,可以使用图1A-1B所示的裸晶附接机100(例如,使用结合工具104b)将多个裸晶108a附接到验证基底112a。可以通过在结合之前对多个全局对准参考标记112a2中的一个或多个进行成像来完成裸晶附接过程。精确地知晓局部基底参考标记112a1与全局对准参考标记112a2的相对位置(例如,通过先前的测量或精确制造)。
图5示出了包括测量轴500a的视场500(例如,由诸如裸晶附接系统100的裸晶附接系统的摄像机所拍摄)。在将多个裸晶108a附接到验证基底112a之后(如图4所示),在单个视场中拍摄每个结合后裸晶108a及其对应的局部基底参考标记112a1的图像,如图5所示。该成像(使用视场500)导致在摄像机测量坐标系中获得的初始测量结果。而尽管图5示出了结合到验证基底112a的一部分的单个裸晶108a的单个视场测量,但是应当理解,可以拍摄多个结合后裸晶108a的多个图像。
在图5的成像之后,确定裸晶108a相对于局部基底参考系统(包括局部基底参考标记112a1,中心点112a1a)的位置。如图6所示,示出了在转换为基底参考系之后的测量结果,该通常涉及摄像机角度相对于基底的反旋(de-rotation)。这使得测量结果不会随偶然摄像机定向和位置而变化。如图6所示,除了角度θ偏差(围绕图6所示的θ轴)之外,还确定了x偏移和y偏移。
尽管图4至图6示出了确定在基底上的裸晶放置的精度的方法(其可以用作将来裸晶放置操作中的校正的反馈),但是根据本文描述的发明系统和方法可以提供其他改进。图7A-7B示出了在裸晶附接操作中确定(和校正)系统偏差的方法。这种系统误差通常作为测量裸晶偏移的平均值或中值获得。图7A示出了结合到验证基底112a的多个裸晶108a(其中,该裸晶结合在裸晶附接机上,诸如包括结合工具104b的裸晶附接机100)。如从图7A中可以看出,多个裸晶108a中的每个从相邻局部基底参考标记112a1之间的期望结合位置偏移(系统误差在图7A中图示为偏心于图7A的底部处的十字的偏移)。
在确定(和/或应用)系统误差之后(例如,通过校正平均或中值裸晶偏移),可以完成另一结合操作。图7B示出了在来自系统误差确定的反馈之后结合到基底112(例如,参见图1A所示的基底112)的多个裸晶108a。在图7B中,由于局部基底参考标记112a1’可能不在基底112上(由于其在验证基底112a上),因此局部基底参考标记112a1’以“虚影”格式示出。尽管如此,如图7B所示,该反馈导致改进的结合,其中结合后裸晶108a被更精确地放置在相邻局部基底参考标记112a1’之间(在图7B中将系统误差示出为已校正,其中“点”定中心于图7B的底部的十字上)。当然,应当理解,可以通过将裸晶108a结合到另一验证基底112a以确认改进精度(与图7B所示的基底112相反)来实现反馈。
除了图4至图6的裸晶附接精度验证以及图7A-7B所示的系统误差确定和校正之外,考虑本发明的其他实施例。例如,可以在本发明的范围内执行某些与精度有关的诊断。图8A-8B示出了结合预先精度检查的这种诊断技术的示例。图8A是裸晶附接系统100的框图,其中摄像机104a对仍附接到膜108b的裸晶108a成像。即,在裸晶附接操作完成之前执行成像。多个裸晶108a仍位于裸晶供应源108的膜108b上。该膜通常是透明的(或半透明的或半透光的),使得在膜下方的基底的标记清晰可见并且可以被准确地测量。在图8A-8B中,验证基底112a定位于裸晶供应源108下方(其中多个裸晶108a仍在膜108b上)。更具体地,使裸晶供应源108(和/或验证基底112a)移动,使得多个裸晶中的至少一个裸晶位于验证基底112a的对应结合位置(即,相应局部基底参考标记112a1之间)上方。在该定向上,对摄像机的视场成像以示出裸晶108a相对于相应局部基底参考标记112a1的相对位置。图8B示出了在这种视场中的单个裸晶108a。使用从该视场获得的图像,可以在裸晶附接过程发生之前获得精度数据。该图像数据可用作反馈以校正任何精度问题。
在本发明的另一示例性方法中,图9A-9B示出了校准操作(例如,机器人平台校准)。相对标记偏移量测量的原理可以应用于机器人平台校准(其中机器人平台是裸晶附接机的通过运动系统移动的一部分,例如,由运动系统移动的结合头104或由另一运动系统移动的裸晶供应源108)。结合这样的机器人平台校准,根据机器人平台的工作区域中的x、y位置来测量机器人轴的典型非线性偏差。对于具有向下看摄像机的机器人平台(例如,通过结合头支撑件102的运动系统而移动的结合头104),可以直接使用基底标记测量来创建机器人平台的所谓误差图。对于没有向下看摄像机的机器人平台(例如,通过供应支撑件106的运动系统而移动的裸晶供应源108),可以使用另一平台的摄像机(例如,摄像机104a)作为测量装置来获得类似误差图。为此,插入校准裸晶供应形式来代替实际裸晶供应源,其中示例性校准裸晶供应形式包括具有标记的光刻制造玻璃板(所谓的“校准晶片”)。校准裸晶供应形式的偏差是通过测量供应形式标记相对于基底参考标记的相对偏移而获得的。这可以在覆盖机器人平台工作区域的各种位置进行。因此,可以同时将两个机器人平台都校准为相同校准参考。通常,一个视场中的多个标记用于此目的(在基底上和在供应形式两者上),从而创建了更精确且更可靠的位置和角度偏移测量能力。
参照图9A-9B所示的具体示例,提供校准裸晶供应形式108’代替在本文提供的其他附图中的裸晶供应源108。校准裸晶供应形式108’保持包括供应形式标记108c1的校准裸晶供应108c。尽管这些供应形式标记是正方形的(类似于先前附图中的裸晶108a的形状),但是可以想到任何类型的供应形式标记形状。基底112a(包括基底参考标记112a1、112a2)定位于校准裸晶供应形式108’下方。在这种构造中,摄像机104a可以用于测量供应形式标记108c1相对于基底参考标记112a1和/或112a2的相对偏移。相对偏移量可与如以上所述每个机器人平台的机器人平台校准结合使用(例如,通过结合头支撑件102的运动系统而移动的结合头104以及通过供应源106的运动系统而移动的裸晶供应源108)。
虽然已经主要关于没有“拾取”操作的裸晶附接操作描述和示出了本发明,但是本发明不限于此。本发明在包括裸晶附接机(有时称为裸晶结合机)或其他封装机(例如,倒装芯片机/操作,高级封装操作等)的半导体结合工业中具有广泛的适用性。
虽然针对具有特定形状(例如,十字形标记、圆形标记、矩形标记等)的标记以及相对于单个裸晶的特定数量的标记(例如围绕每个裸晶的四个基底参考标记112a1)等来图示和描述了本发明的示例性实施例,但这些类型的细节本质上是示例性的,并且对本发明的范围不构成限制。
尽管已经相对于本发明的示例性实施例描述和说明了本发明,但是本领域技术人员应当理解,在不脱离本发明的精神和范围的前提下,可以在其上以及对其做出前述和各种其他改变、省略和添加。而是,在不脱离本发明的情况下,可以在本发明的等同形式的范围内对细节进行各种修改。
- 裸晶附接系统及用此系统进行集成精度验证和校准的方法
- 从裸芯附接膜带分离半导体裸芯的系统和方法