手部可穿戴式遥操作设备
文献发布时间:2023-06-19 10:57:17
技术领域
本说明书涉及自动控制技术领域,具体涉及一种手部可穿戴式遥操作设备。
背景技术
为了能够实现操作的临场感,手部可穿戴遥操作设备已经安装有力反馈机构,利用力反馈机构将执行装状态反馈至操作者。但是,当前的力反馈机构多采用齿轮刹车、磁流变液机构,相应的机构直接涉及在手指部;对应的,相应机构需要采用微加工工艺制作,成本很高;另外,直接安装在指部的力反馈机构并不利于遥操作设备的穿戴。
发明内容
本说明书提供一种手部可穿戴设备,用于解决现有手部可穿戴设备力反馈机构安装在手部带来的问题。
本说明书提供一种手部可穿戴式遥操作设备,包括:手套部、手背杆、手指杆、伸缩调整部和连接杆;所述手套部包括掌套部和指套部;
所述手背杆与所述掌套部固定连接;所述手指杆安装在所述指套部上;所述手指杆与所述手背杆连接,并可以相对所述手背杆的转动;
所述伸缩调整部包括第一滑杆、第二滑杆和压力调整机构;第一滑杆相对所述第二滑杆相对移动时,二者重叠长度改变;所述压力调整机构安装在所述第一滑杆或第二滑杆之一上,用于限制所述第一滑杆和所述第二滑杆间重叠长度的改变;
所述第一滑杆与所述手背杆可转动地连接;
所述连接杆的一端与所述手指杆可转动地连接,另一端与所述第二滑杆可转动地连接。
可选地,所述手指杆包括至少两个手指支杆;各个所述手指支杆均安装在指套部上,并且顺次可转动地连接;一个端部的手指支杆与所述手背杆可转动地连接;
所述连接杆包括与所述手指支杆数量相同的连接支杆;各个连接支杆一端分别与一所述手指支杆可转动地连接,另一端均与所述第二滑杆可转动地连接。
可选地,所述手指杆包括一中继杆;
各个所述连接支杆均与所述中继杆铰接连接;所述中继杆与所述第二滑杆可转动地连接。
可选地,所述中继杆和所述手指支杆间铰接连接;所述一个端部的手指支杆与所述手背杆铰接连接。
可选地,所述第一滑杆和第二滑杆之一为管状杆,另一滑杆插入到所述管状杆内;
所述压力调整机构包括多个设置在所述管状杆内,并且环绕另一滑杆的多个扇形电磁铁;相邻两个所述扇形电磁铁的相邻磁极间具有间隙,并且极性相反。
可选地,还包括设置所述指套部上,用于检测所述指套部对应的手指弯曲程度的第一弯曲传感器。
可选地,还包括设置在所述手套部上,用于检测拇指横摆程度的第二弯曲传感器。
可选地,所述指套部为弹性指套部;还包括设置在所述指套部上,用于检测所述指套部变形状态压力传感器;
在所述压力传感器检测到的压力阈值超过设定值时,所述压力调整机构减小作用在所述第一滑杆或所述第二滑杆上的压力。
可选地,还包括设置在所述指套部或者所述掌套部上,用于在远程操作执行设备检测压力超过阈值时生成提示信息的状态反馈传感器。
可选地,包括设置在掌套部上,用于检测腕部运动姿态的加速度传感器。
因为本说明书提供的遥操作设备中力反馈机构的压力调整部件设置在手背面侧,仅需要在手指部分设置杆状连接结构,减小了指部结构的复杂度。另外,前述力反馈机构采用杆状件连接结构,加工较为简单。
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制。
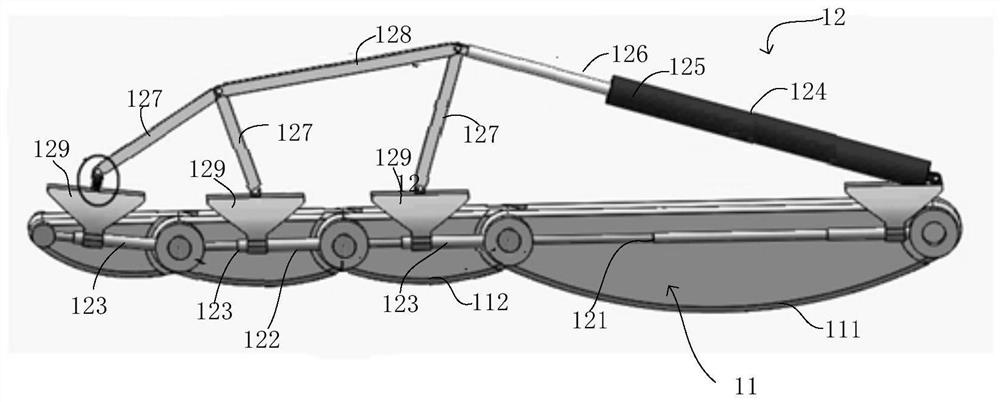
图1是实施例提供的遥操作设备的部分结构示意图;
图2是实施例提供的遥操作设备的俯视图;
其中:11-手套部,111-掌套部,112-指套部,12-力反馈机构,121-手背杆,122-手指杆,123-手指支杆,124-伸缩调整部,125-第一滑杆,126-第二滑杆,127-连接杆,128-中继杆,129-调整件,13-第一弯曲传感器,14-第二弯曲传感器,15-压力传感器,16-加速度传感器。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本申请一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
本说明书实施例提供一种手部可穿戴式遥操作设备,其具有根据远程执行端设备生成的力反馈信号向使用者手指施加负载,以模拟执行端力反馈效果的反馈机构。
图1是实施例提供的力遥操作设备的部分结构示意图。图1中的力反馈机构12仅用于向一个手指施加负载。实际应用中,可以在遥操作设备设置五个前述的反馈机构,以分别向五个手指提供力反馈。
如图1所示,本实施例的遥操作设备包括手套部11,手套部11用于将整个遥操作设备佩戴在操作者的手部,并使得力反馈机构中各个部件位于手部对应的位置。手套部11包括掌套部111和指套部112,掌套部111用于和手掌配合,指套部112用于和手指配合。
请继续参见图1,本实施例中,力反馈机构12包括手背杆121、手指杆122、伸缩调整部124和连接杆127。
手背杆121固定在掌套部111的手背面上,在使用时其位置相对操作者的手部固定。
手指杆122安装在指套部112上,并可以随着操作者手指的动作而随动动作。
手指杆122和手背杆121连接,并可以相对手背杆121转动。具体应用中,手指杆122和手背杆121可以采用铰接连接,也可以采用可弯转部件连接,以确保二者之间可以相对转动。在本实施例具体应用中,手指杆122和手背杆121采用铰接轴铰接连接;铰接轴轴向大体垂直于手指延伸方向设置。
伸缩调整部124包括第一滑杆125、第二滑杆126和压力调整机构(图中未示出)。其中第一滑杆125和第二滑杆126二者在延伸方向上具有一定的重叠,并且可以相对滑动;在第一滑杆125相对于第二滑杆126滑动时,二者的重叠长度改变。压力调整机构设置在第一滑杆125或者第二滑杆126之一上,其摩擦施力面贴合另一滑杆。在压力调整机构动作时,其向另一滑杆施加压力,通过施加压力对另一活动的滑杆施加滑动摩擦力,限制第一滑杆125和第二滑杆126之间重叠长度的改变而实现力反馈。本实施例中,压力调整机构根据远程执行端设备生成的力反馈信号动作,而向另一滑杆施加压力。
另外,伸缩调整部124中的第一滑杆125与手背杆121可转动的连接。第一滑杆125和手背杆121可以采用铰接连接,也可以采用可弯转部件连接。如1所示,本实施例中,在第一滑杆125和手背杆121采用铰接轴铰接连接的情况下,铰接轴轴向大体垂直于手指的延伸方向。
连接杆127的一端与手指杆122可转动地连接,另一端与第二滑杆126可转动的连接。连接杆127与手指杆122、第二滑杆126之间可以采用铰接轴连接。
根据前述的结构可知:操作者带上遥操作设备后,当其手指相对手背发生移动时,其中的手指杆122也相对于手背杆121转动。在手指杆122移动的过程中,手指杆122相对连接杆127转动,并带动连接杆127运动,而连接杆127带动第二滑杆126相对第一滑杆125移动。在远程执行端设备生成的力反馈信号的情况下,压力调整机构根据反馈信号施加摩擦力,限制第一滑杆125相对第二滑杆126的移动,实现了力量的反馈;反馈力经过连接杆127转移到手指杆122上,使得操作者感受到反馈力。
因为前述力反馈机构12的压力调整部件设置在手背面侧,仅需要在手指部分设置杆状连接结构,减小了指部结构的复杂度。前述力反馈机构12采用杆状件连接结构,加工较为简单。
本实施例中,根据手指指节的数量(针对拇指为两个指节,针对其他手指为三个指节),手指杆122包括对应数量的手指支杆123。各个手指支杆123均安装在指套部112上,并且顺次可转动地连接;对应的,连接杆127包括与手指支杆123数量相同的连接支杆;各个连接支杆的一端分别与一个手指支杆123可转动地连接,另一端均与第二滑杆126可转动地连接。
进一步的,手指杆122还包括一中继杆128。各个连接支杆均与中继杆128铰接连接,中继杆128与第二滑杆126可转动地连接。可以想到,通过设置中继杆128后,并且合理地设置各个手指支杆123的长度、中继杆128的长度以及第二滑杆126的伸缩长度,操作者在佩戴遥操作设备的情况下手指可以活动至常规的极限位置。
具体应用中,为了使得一个遥操作设备能够被多个操作者使用,力反馈机构12还做了如下设置:(1)各个手指支杆123和手背杆121采用多节结构设置,以根据使用者的手指指节长度、手背长度适应性地调整;(2)在各个手指支杆123和连接支杆之间分别设置一调整件129,调整件129与连接支杆铰接连接。在使用前,可以通过调整调整件129在手指支杆123上的位置。
本说明书实施例中,第一滑杆125为一管状杆。第二滑杆126插入到第一滑杆125内。压力调整机构安装在第一滑杆125内。具体的,压力调整机构包括多个安装在第一滑杆125管腔中的扇形电磁铁127,各个扇形电磁铁127环绕第二滑杆126;相邻的两个扇形电磁铁127的相邻次级件具有间隙,并且极性相反。可以想到,在各个电磁铁通电的情况下,相邻电磁铁的相邻磁极之间形成吸引力,在吸引力的作用下,各个扇形电磁铁127均向第二滑杆126施加更大的压力,继而在第一滑杆125和第二滑杆126具有相对移动趋势时产生更大的摩擦力。
在其他实施例中,压力调整机构也可以为其他类型的结构,例如可以是磁流变液压力调整机构、液压压力调整机构等。
图2是实施例提供的遥操作设备的俯视图。为了显示遥操作设备中的其他部件,图2中并没有示出前述的力反馈机构12。
实际应用中,在压力调整机构动作时,操作者手指肌肉动作产生的力量并不足以使得第一滑杆125相对第二滑杆126移动。而此时,为了使得遥操作设备能够继续根据随动操作者的手部动作,需要适应性地调整压力调整机构的作用力。
其为了解决前述问题,本实施例中的指套部112可以设置为弹性指套部112。另外还包括设置在指套部112上的压力传感器15。在遥操作设备使用时,操作者带动指套部112而使得指套部112发生变形时,指套部112上的压力传感器15生成压力信号,在压力传感器15检测的压力信号表示压力阈值超过设定值时,此压力信号可以用于控制压力调整机构短时间减小压力调整执行施加的压力,继而使得力反馈机构12可以随手指完成一定的动作。
如图2所示,本实施例提供的遥操作设备还包括设置在手套部11上的第一弯曲传感器13。具体的,第一弯曲传感器13可以设置在指套部112在手背面的一侧,也可以设置在手掌部靠近指套部112并延伸至指套部112。可以想到,手指处在不同的姿态时,第一弯曲传感器13状态不同,相应的其输出的信号也就不同;如此,可以根据第一弯曲传感器13生成信号确定用户手指的动作,以控制远程执行端。
请继续参见图2,本实施例中,除了包括前述的第一弯曲传感器13外,还包括设置在掌套部111上的第二完全传感器。如图1所示,第二弯曲传感器14位于手背部靠近腕部的区域,其大体垂直于中指延伸方向的设置。在拇指横向摆动时(也就是拇指相对手掌面摆动时),第二弯曲传感器14发生变形而输出对应的信号。如此,可以根据第二弯曲传感器14生成的信号确定用户拇指的横摆动作。
本实施例提供的遥操作设备,除了包括前述的用于手部动作的传感器和力反馈机构12外,还包括设置在掌套部111上,用于检测腕部运动姿态的加速度传感器16。加速度传感器16安装在掌套部111靠近腕部区域,可以用于检测腕部在三个方向的动作姿态生成腕部动作信号,腕部动作信号可以用于控制远程执行端模仿腕部动作的执行机构的动作。
此外,为了保证操作者能够感受远程执行端在抓握操作对象时的压力状态,遥操作设备还包括设置状态反馈传感器;状态反馈传感器可以设置在指套部112上,也可以设置掌套部111上。远程执行端中用于检测抓握操作对象操作压力的传感器生成的压力信号,此压力信号传输至遥操作设备后,遥操作设备根据压力信号控制状态反馈传感器的振动状态。实际应用中,可以根据压力信号的强弱调整状态反馈传感器处在不同的振动状态,也可以在压力信号为特定的压力信号使得状态反馈传感器振动。
本实施例提供的遥操作设备除了包括前述的各个传感器和力反馈机构12外,还包括用于和前述各个传感器连接的信号采集电路,以及与力反馈机构12和状态反馈传感器连接的执行控制电路。信号采集电路将各个传感器生成的信号进行处理转换,通过通信接口发送给上位处理设备或者远程执行端;执行控制电路从远程执行端或者上位处理设备接收到的信号控制力反馈机构12中的压力调整机构或者状态反馈传感器的动作。采用本实施例提供的遥操作设备,在操作者穿戴遥操作设备后,使得操作者执行机构特定的动作而实现遥操作设备的状态特性校正后,确定各个标准姿态与输出信号的对应关系后,即可以使操作者操作远程执行端。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
- 手部可穿戴式遥操作设备
- 遥操作机械手及其摇臂结构、遥操作设备