一种通用性自动化设备的可编程控制装置
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及自动化设备领域,具体为一种通用性自动化设备的可编程控制装置。
背景技术
目前有PLC,其他符号编程控制装置如G代码,示教编程装置等等,这些控制装置追求的最大目标是通用性与易用性,现有这些可编程控制装置的编程都至少要求是工厂的技术员,我们的可编程控制装置编程普工即可完成,最大可能实现编程参数化,实现半自动编程,自动化设备,是用于相应工件产品的加工,一般加工轨迹与动作需要编入控制装置中,现有的可编程控制装置或者示教编程装置都是顺序编程,即按照执行的顺序,现有的可编程控制装置顺序编程方法,还是不够简单简洁,操作工人无法编程,这样编程成本高,让工厂企业需要培养养活更多的技术人员,使用不方便。
发明内容
针对现有技术存在的不足,本发明目的是提供一种通用性自动化设备的可编程控制装置,以解决上述背景技术中提出的问题,本发明结构新颖,使用时有效的进一步简化了编程,操作工人也可以进行编程。
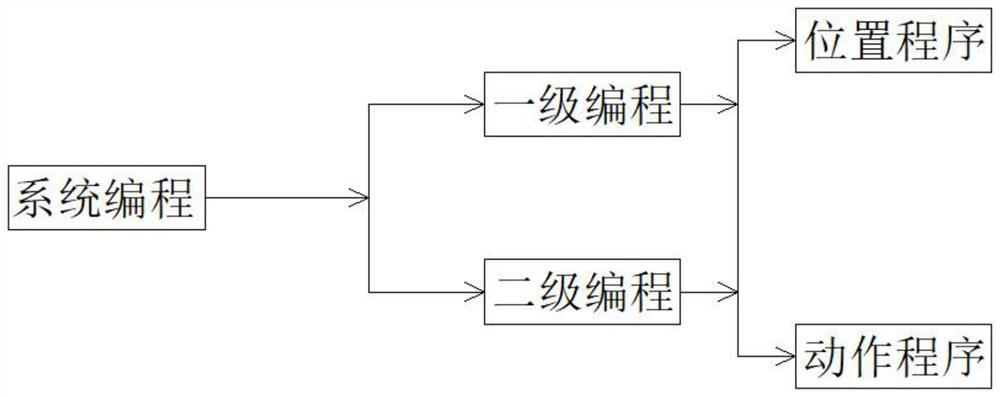
为了实现上述目的,本发明是通过如下的技术方案来实现:一种通用性自动化设备的可编程控制装置,包括控制装置本体,所述控制装置本体包括系统编程,所述系统编程包括一级编程和二级编程,所述一级编程和二级编程均包括位置程序与动作程序,所述一级编程为技术员进行动作编程,进行离线动作编程,即编写设备动作模块程序,这个部分编程定义了设备功能,即设备的动作,同时将属性做组合形成,即将该部分程序参数化,方便二级编程的时候使用,编完后通过网口写入控制装置,或USB接口导入控制装置,所述二级编程为操作人员进行位置编程,基本是设置参数方式编程,需要联机现场示教编程,主要内容为增加与编辑轨迹位置点,并指定对应位置点属性。
作为本发明的一种优选实施方式,所述位置程序为“位置点”的集合,程序编号1-9,所述“位置点”包含:坐标,属性和参数;其中属性决定了运动到这个点后执行的动作。
作为本发明的一种优选实施方式,所述动作程序为动作指令的集合,动作指令指所有的非定位指令,包括Yi指令,Xi判断指令,延时指令,算术运算指令,条件判断指令,跳转指令和子程序调用指令等等,程序编号为11-99。
作为本发明的一种优选实施方式,所述“位置点”的属性,定义了到这个位置点的时候,需要做的动作,我们设计的架构是执行这个点的运动之前,要执行一个动作程序P-CALL,执行完了这个点的运动指令后,要执行一个动作程序A-CALL,P-CALL,A-CALL取值范围是11-99,P-CALL,A-CALL的组合称之为位置点的属性;编号1-10,并且对应有相应名称。
ATSP运动控制器内部嵌入式系统对编程文件的执行流程如下表:
嵌入式软件系统解析,db2编程文件后,从主程序80程序开始执行,如上图,80程序中是条件执行位置程序P1和位置程序P2,P1的内容,是一个个位置点,每个位置点包含:坐标,属性和4个参数;属性决定了这个点的执行动作,P1和P2的执行是一个点一个点的顺序执行,一个位置点的执行,包含如下3个步骤:
步骤一:PCall程序的执行PCall=-1的时候表示这步为空,或者例PCall=11,则内部会去执行动作程序11
步骤二:点坐标的位置定位运动有2种模式:1.直线插补定位,2.U轴抬起XYZ直线插补再U轴下到位,
步骤三:ACall程序的执行ACall=-1的时候表示这步为空,或者例ACall=12,则内部会去执行动作程序12连续的位置点,其属性为PCall=ACall=-1的时为连续插补点,即连续轨迹。
嵌入式软件系统对于指令的执行,除了同步阻塞指令,其他所有指令都是异步非阻塞执行。因设备功能的需要,同步阻塞指令是必须的,如等待运动完成指令,等待Xi输入点位指令等等,本发明产品的嵌入式软件系统,是针对ATSP编程方法需求自行研发的多任务嵌入式系统,区别于RTOS,μC/OS,linux等等标准嵌入式操作系统,使用这些标准嵌入式操作系统能够减小开发难度与开发时间,但是不利于程序指令的执行,因为嵌入式操作系统的时间开销而增加程序指令执行时间,在多任务的时候特别严重,嵌入式软件系统支持最多10个任务同时执行。
技术人员进行1级编程时,通过上位机电脑软件,符号方式输入动作程序的动作指令集,即离线动作程序编程,将设备的各动作编到对应的模块程序中具体如下表:
本发明的有益效果:本发明目前已经产品化,通用性较强,才做简单,已用于自动置螺母设备,自动螺丝机,彩妆行业高速自动点胶机,包装行业自动画胶机,高速自动插片机,自动气保焊设备等等。
附图说明
图1为本发明一种通用性自动化设备的可编程控制装置的系统结构示意图;
图2为本发明一种通用性自动化设备的可编程控制装置的ATSP编程步骤的结构示意图;
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
请参阅图1和图2,本发明提供一种技术方案:一种通用性自动化设备的可编程控制装置,包括控制装置本体,所述控制装置本体包括系统编程,所述系统编程包括一级编程和二级编程,所述一级编程和二级编程均包括位置程序与动作程序,所述一级编程为技术员进行动作编程,进行离线动作编程,即编写设备动作模块程序,这个部分编程定义了设备功能,即设备的动作,同时将属性做组合形成,即将该部分程序参数化,方便二级编程的时候使用,编完后通过网口写入控制装置,或USB接口导入控制装置,所述二级编程为操作人员进行位置编程,基本是设置参数方式编程,需要联机现场示教编程,主要内容为增加与编辑轨迹位置点,并指定对应位置点属性。
作为本发明的一种优选实施方式,所述位置程序为“位置点”的集合,程序编号1-9,所述“位置点”包含:坐标,属性和参数;其中属性决定了运动到这个点后执行的动作。
作为本发明的一种优选实施方式,所述动作程序为动作指令的集合,动作指令指所有的非定位指令,包括Yi指令,Xi判断指令,延时指令,算术运算指令,条件判断指令,跳转指令和子程序调用指令等等,程序编号为11-99。
作为本发明的一种优选实施方式,所述“位置点”的属性,定义了到这个位置点的时候,需要做的动作,我们设计的架构是执行这个点的运动之前,要执行一个动作程序P-CALL,执行完了这个点的运动指令后,要执行一个动作程序A-CALL,P-CALL,A-CALL取值范围是11-99,P-CALL,A-CALL的组合称之为位置点的属性;编号1-10,并且对应有相应名称。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种通用性自动化设备的可编程控制装置
- 一种电气自动化设备用可编程逻辑控制器