一种基于图传信号匹配的无人机检测识别方法和系统
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及无人机检测和识别领域,一种基于无人机无线电信号的检测和识别方法,尤其涉及一种基于图传信号匹配的无人机检测识别方法和系统。
背景技术
近年来,随着无人机技术的发展和无人机价格的不断走低,无人机市场蓬勃发展,尤其各种民用无人机在各个领域得以广泛应用,与此同时,大量无人机的使用又带来许多安全隐患,如干扰民航正常通信、非法拍摄、干扰正常活动等,因此对无人机的有效探测和识别变得十分重要。
现有的无人机探测技术主要有雷达探测、光电探测、声音探测和无线电信号探测。由于无人机的低空域、慢速度和小目标特性,导致雷达探测的距离普遍较近;而光电探测同样无法在较远距离下获得足够的目标像素,且光电探测受粉尘、雾霾等环境因素影响较大;基于声音特征的探测距离通常也较近,而基于无人机无线电信号的探测方法具有隐蔽性好、可靠性高、探测距离远的优点。当前基于无线信号的探测方法大都是基于信号时域特征、频谱特征等进行检测和识别,其性能受限于干扰和背景噪声,难以实现低信噪比下的检测。
发明内容
发明目的:针对现有技术的不足,为了进一步提高基于无线电信号的无人机探测和识别性能,本发明提出一种基于图传信号匹配的无人机检测识别方法和系统,通过匹配无人机图传信号中的同步信号实现无人机的检测和识别,在信噪比小于零时正确检测和识别无人机。
技术方案:本发明提供一种基于图传信号匹配的无人机检测识别方法,包括
(1)设置频点,根据无人机图传信号带宽设置采样率,采集一段时间的无线基带信号;
(2)使用预先存储的无人机同步信号,在该数据中进行同步信号的存在性检测;
(3)如果检测到同步信号,说明该频点上存在无人机图传信号,进而截取一段数据进行导频信号的检测,从而完成无人机的识别。
进一步地,所述步骤(2)包括以下步骤:
(21)对采集的无线电信号与本地存储的的同步信号进行相关运算,计算归一化互相关系数;
(22)归一化互相关系数与预先设定的门限thre1进行比较,记录超过门限的数据位置和对应的互相关系数值;
(23)对超过门限的数据进行筛选和去重:相邻的两个数据位置间隔小于预设窗长值时仅保留其中的大值,将另一个删除,获得归一化相关值大于预设门限、并且位置间隔大于预设窗长的一组;
(24)将位置间隔根据信号的采样率转换为时间间隔,判断该时间间隔与图传信号中同步信号的传输间隔之差的绝对值是否小于预设门限,如果小于预设门限,则判断为存在无人机信号;否则认为该频点上不存在无人机信号。
进一步地,所述步骤(3)包括以下步骤:
(31)从接收数据中截取一段基带数据与本地存储的导频信号进行滑动相关,计算归一化相关系数;
(32)归一化互相关系数与预先设定的门限thre2进行比较,记录超过门限的数据位置和对应的值;
(33)过门限的数据进行筛选和去重,具体地,相邻的两个数据位置间隔小于预设窗长值时仅保留其中的大值,然后将另一个删除,获得归一化相关值大于预设门限、并且位置间隔大于预设窗长的一组;
(34)将位置间隔根据信号的采样率转换为时间间隔,判断该时间间隔是否与图传信号中导频信号的间隔匹配;如果匹配,则该无人机为与该导频信号对应的无人机;否则选取下一个无人机对应的导频信号进行无人机识别,直至识别出无人机的编号或数据库中的导频信号遍历完。
进一步地,所述步骤(21)通过以下公式实现:
其中,x(k)代表接收信号序列,s(k)表示图传信号中的同步信号序列,L代表同步信号序列的长度,N为接收信号的长度。
本发明还提供一种基于图传信号匹配的无人机检测识别系统,包括:
数据采集和处理模块,获取满足采样率要求的基带数据;
同步信号检测模块,实现接收数据与同步信号的互相关系数计算、互相关系数与门限的比较、超过门限数据的筛选和去重以及与同步信号传输时间间隔的匹配判断;
导频信号检测模块,实现接收数据与导频信号的互相关系数计算、互相关系数与门限的比较、超过门限数据的筛选和去重以及与导频信号传输时间间隔的匹配判断;
检测和识别模块,根据同步信号检测的结果和导频信号检测的结果,分别做出不存在无人机、存在未知无人机和存在已知编号无人机的判决。
有益效果:与现有技术相比,本发明的有益效果:本发明可以在信噪比0dB以下检测和识别出无人机。
附图说明
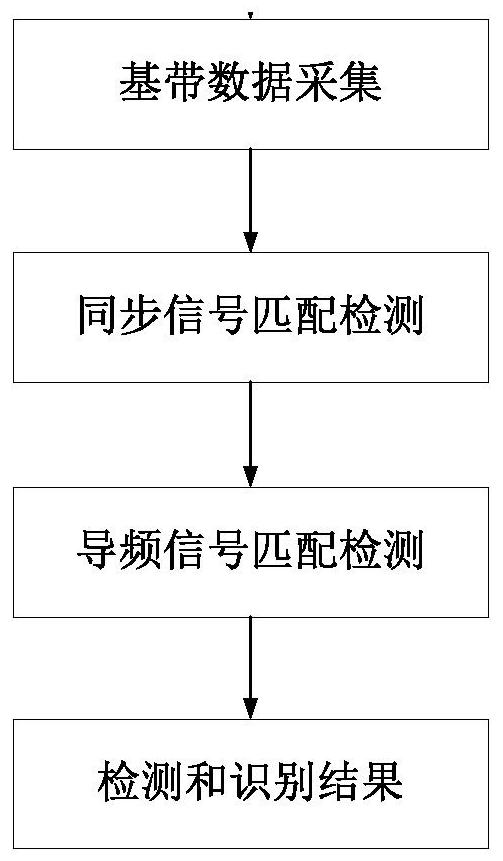
图1为基于图传信号的无人机检测和识别框图;
图2为无人机检测流程示意图;
图3为无人机识别流程示意图;
图4为本发明实施方式中采集的一段较高信噪比下的无人机信号波形图和频谱图;
图5为本发明实施方式中图4数据与同步信号的归一化互相关系数;
图6为发明实施方式中图4数据与导频信号的归一化互相关系数;
图7为带内信噪比约0.5dB时的无人机信号波形图和频谱图;
图8为本发明实施方式中图7数据与同步信号的归一化互相关系数;
图9为发明实施方式中图7数据与导频信号的归一化互相关系数。
具体实施方式
下面结合附图对本发明的内容做进一步的阐述,应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
如图1所示,本发明提供一种基于图传信号匹配的无人机检测识别方法,首先,根据无人机图传信号的带宽设置采样率和接收频点,采集一段时间的无线基带信号;其次,使用预先存储的无人机同步信号,在该数据中进行同步信号的存在性检测;最后,如果检测到同步信号,说明存在该频点上存在无人机图传信号,进而截取一段数据进行导频信号的检测,从而完成无人机的识别;具体包括以下步骤:
步骤1:设置频点,根据无人机图传信号带宽设置采样率,采集一段时间的无线基带信号,记为x(n),n=0,1,L,N-1。
步骤2:对采集的无线电信号x(n)与本地存储的图传信号中的同步信号s(n)(n=0,1,L-1)进行相关运算,计算归一化互相关系数,计算公式如下:
其中,x(n)代表接收信号序列,s(n)表示图传信号中的同步信号序列,L代表同步信号序列的长度,N为接收信号的长度。
步骤3:对步骤2中的归一化互相关系数与预先设定的门限thre1进行比较,记录超过门限的数据位置和对应的互相关系数值,记为:
ind=[i
步骤4:对步骤3中的数据进行筛选和去重,具体地,相邻的两个互相关系数值位置间隔小于预设窗长值时仅保留其中的互相关系数较大的那一个,然后将另一个删除,获得归一化相关值大于预设门限、并且位置间隔大于预设窗长的一组,记为ind=[i
步骤5:计算步骤4中相邻两个超过预设门限的互相关系数的位置间隔,记为i_diff=[d
步骤6:将步骤5的位置间隔i_diff根据信号的采样率转换为时间,记为t_diff=[t
步骤7:从接收数据中截取一段x(n)(n=0,1,L,N
其中,x(n)代表接收信号序列,p(n)表示图传信号中的导频信号序列,L
步骤8:对步骤7中的归一化互相关系数与预先设定的门限thre2进行比较,记录超过门限的数据位置和对应的值,记为ind=[i
步骤9:对步骤8中过门限的互相关系数进行筛选和去重,具体地,相邻的两个数据位置间隔小于预设窗长值时仅保留其中的互相关系数较大的一个,然后将另一个删除,获得归一化相关值大于预设门限,并且位置间隔大于预设窗长的一组,记为ind=[i
步骤10:计算步骤9中相邻两个超过预设门限数据的位置间隔,记为i_diff=[d
步骤11:将步骤10的位置间隔根据信号的采样率转换为时间t_diff=[t
本发明还提供一种基于图传信号匹配的无人机检测识别系统,包括:
数据采集和处理模块,获取满足采样率要求的基带数据;
同步信号检测模块,实现接收数据与同步信号的互相关系数计算、互相关系数与门限的比较、超过门限数据的筛选和去重以及与同步信号传输时间间隔的匹配判断;
导频信号检测模块,实现接收数据与导频信号的互相关系数计算、互相关系数与门限的比较、超过门限数据的筛选和去重以及与导频信号传输时间间隔的匹配判断;
检测和识别模块,根据同步信号检测的结果和导频信号检测的结果,分别做出不存在无人机、存在未知无人机和存在已知编号无人机的判决。
以某无人机的检测和识别为例,假设该无人机的图传信号工作在2400MhZ-2480MHz和5725MHz-5829Mhz频段,图传信号带宽为18MHz;已经采集并分析出该无人机的导频信号和同步信号,在本地产生并存储,无人机图传信号以帧为单位进行传输,每帧持续时间为1ms,其同步信号的时间间隔为20ms,每帧包含两个导频信号,其间隔为0.5ms。通常情况下同一型号的无人机同步信号只有几种,而导频信号每个无人机都不同,采集的该型号无人机同步信号只有一种,导频信号每个人无人机都不同;根据频偏对导频信号和同步信号自相关性的影响,设置图传信号检测时的频点间隔为200kHz,接收机在配置的频点上以30.72MHz的数据率采集220ms的基带数据x(n),n=0,1,L,N-1,N=6758400,该采集信号在较高信噪比下的时域波形图和频谱图如图4所示;对采集的无线电信号x(n)与本地存储的图传信号中的同步信s(n)(n=0,1,2047)进行相关运算,计算归一化互相关系数,并与预先设定的门限0.2进行比较,记录超过门限的数据位置和对应的值;对过门限的数据进行筛选和去重,获得归一化相关值大于预设门限、并且位置间隔大于预设窗长的一组,预设窗长为3000;计算相邻两个超过预设门限数据的位置间隔,并将位置间隔根据信号的采样率转换为时间,判断该时间间隔与图传信号中同步信号的传输间隔20ms之差的绝对值是否小于预设门限32us,如果小于预设门限,则判断为存在无人机信号,进一步识别无人机是否为已知无人机;否则判断为该频点不存在无人机信号,采集信号与同步信号相关、去重之后的结果如图5所示。从接收数据中截取一段时长10ms的x(n)(n=0,1,L,307199)与本地存储的导频信号p(n)(n=0,1,L,2047)计算归一化互相关系数;将归一化互相关系数与预先设定的门限0.16进行比较,记录超过门限的数据位置和对应的值;对过门限的数据进行筛选和去重,获得归一化相关值大于预设门限,并且位置间隔大于预设窗长的一组,预设窗长为3000,采集信号与导频信号相关、去重之后的结果如图6所示;计算相邻两个超过预设门限数据的位置间隔;将位置间隔根据信号的采样率转换为时间,判断该时间间隔与图传信号中导频信号的传输间隔0.5ms的比值取整后为奇数,并且该比值与取整值之差的绝对值是否小于预设门限0.05,如果小于预设门限,则该无人机为与该导频信号对应的无人机;否则选取下一个无人机对应的导频信号进行无人机识别,直至识别出无人机的编号或数据库中的导频信号遍历完。
该采集信号在较低信噪比下的时域波形图和频谱图如图7所示,改信号与同步信号相关、去重之后的结果如图8所示,该信号与导频信号相关、去重之后的结果如图9所示。从仿真结果可以看出,频谱和时域图中图传信号几乎都淹没在噪声中,但是信号与同步信号的归一化相关值、信号导频信号的归一化相关值都超过了预设门限,即依然可以通过本发明提供的方法检测出图传信号中的同步信号和导频信号,从而实现无人机的检测和识别。
- 一种基于图传信号匹配的无人机检测识别方法和系统
- 一种基于相关域检测的无人机图传信号识别方法及系统