装载判定系统、装载判定方法以及非暂时性存储介质
文献发布时间:2023-06-19 11:19:16
技术领域
本公开涉及装载判定系统以及装载判定方法。
背景技术
例如,在日本特开2019-106057号公报中公开了一种装载判定系统,其基于存储在车辆装载信息数据库中的车辆的尺寸信息和作为装载对象的货物的大小,判定在车辆是否能够装载货物。
但是,在日本特开2019-106057号公报所公开的装载判定系统中,需要预先将货物的尺寸登记到数据库中,在判定尺寸未知的货物是否能够装载于车辆的方面存在改善的余地。
发明内容
本公开得到一种能够判定尺寸未知的货物是否能够装载于车辆的装载判定系统以及程序。
第一方式的装载判定系统具有:装载空间尺寸取得部,取得车辆中的装载空间的尺寸;货物图像取得部,取得作为装载对象的货物的图像数据;货物尺寸计算部,基于由所述货物图像取得部取得的所述图像数据来计算所述货物的尺寸;及判定部,通过将由所述装载空间尺寸取得部取得的所述装载空间的尺寸与由所述货物尺寸计算部计算出的所述货物的尺寸进行比较,来判定所述货物是否能够装载于所述装载空间。
在第一方式的装载判定系统中,由装载空间尺寸取得部取得车辆中的行李箱等装载空间的尺寸。另外,由货物图像取得部取得作为装载对象的货物的图像数据。而且,货物尺寸计算部基于该由货物图像取得部取得的货物的图像数据来计算货物的尺寸。如此,通过使用货物的图像数据来计算货物的尺寸,即使在作为装载对象的货物的尺寸未被预先登记的情况下,也能够容易地取得货物的尺寸。
另外,判定部通过将装载空间的尺寸与货物的尺寸进行比较,来判定货物是否能够装载于装载空间。由此,使用者仅通过确认判定部的判定结果,就能够判断能否装载货物。
就第二方式的装载判定系统而言,在第一方式中,所述装载空间尺寸取得部从预先存储有每个车型的装载空间的尺寸的存储部取得所述装载空间的尺寸。
在第二方式的装载判定系统中,通过由装载空间尺寸取得部读出在存储部中所存储的车辆的尺寸信息,从而取得该车型的装载空间的尺寸。
就第三方式的装载判定系统而言,在第一方式中,所述装载空间尺寸取得部根据由拍摄装置拍摄到的装载空间的图像数据取得所述装载空间的尺寸。
在第三方式的装载判定系统中,仅通过由拍摄装置拍摄装载空间,就能够取得装载空间的尺寸。
就第四方式的装载判定系统而言,在第三方式中,在所述装载空间预先装载有货物的情况下,所述装载空间尺寸取得部考虑该货物来取得所述装载空间的尺寸。
在第四方式的装载判定系统中,在由拍摄装置拍摄到装载空间时,在图像数据包含货物的情况下,装载空间尺寸取得部将从装载空间的整体的尺寸减去货物的尺寸而得到的尺寸作为装载空间的尺寸来取得。
就第五方式的装载判定系统而言,在第一方式至第四方式的任一方式中,还具备指示部,该指示部向使用者指示所述货物的装载场所和装载方向。
在第五方式的装载判定系统中,由指示部向使用者指示货物的装载场所及装载方向。由此,使用者能够容易地掌握货物的装载方法。
第六方式的程序使计算机执行处理,所述处理包括:装载空间尺寸取得步骤,取得车辆中的装载空间的尺寸;货物图像取得步骤,取得作为装载对象的货物的图像数据;货物尺寸计算步骤,基于在所述货物图像取得步骤中取得的所述图像数据来计算所述货物的尺寸;及判定步骤,通过将利用所述装载空间尺寸取得步骤所取得的所述装载空间的尺寸与利用所述货物尺寸计算步骤计算出的所述货物的尺寸进行比较,来判定所述货物是否能够装载于所述装载空间。
在第六方式的程序中,在装载空间尺寸取得步骤中取得车辆中的行李箱等装载空间的尺寸。另外,在货物图像取得步骤中,取得作为装载对象的货物的图像数据。而且,在货物尺寸计算步骤中,基于在货物图像取得步骤中取得的货物的图像数据来计算货物的尺寸。然后,在判定步骤中,通过将装载空间的尺寸与货物的尺寸进行比较,来判定货物是否能够装载于装载空间。如此,通过使用货物的图像数据来计算货物的尺寸,即使在作为装载对象的货物的尺寸未被预先登记的情况下,使用者也能够判断能否装载货物。
如以上所说明的那样,根据第一方式的装载判定系统,能够判定尺寸未知的货物是否能够装载于车辆。
根据第二方式的装载判定系统,不需要用于测量装载空间的尺寸的装置等。
根据第三方式的装载判定系统,在取得装载空间的尺寸时不需要车辆的信息。
根据第四方式的装载判定系统,即使在车辆的装载空间预先装载有货物的情况下,也能够容易地判定能否装载作为装载对象的货物。
根据第五方式的装载判定系统,能够缩短货物的装载所需的时间。
根据第六方式的程序,能够判定尺寸未知的货物是否能够装载于车辆。
附图说明
基于以下附图详细描述本发明的示例性实施例,其中:
图1是表示第一实施方式所涉及的装载判定系统的硬件结构的框图。
图2是表示第一实施方式所涉及的装载判定系统的功能结构的框图。
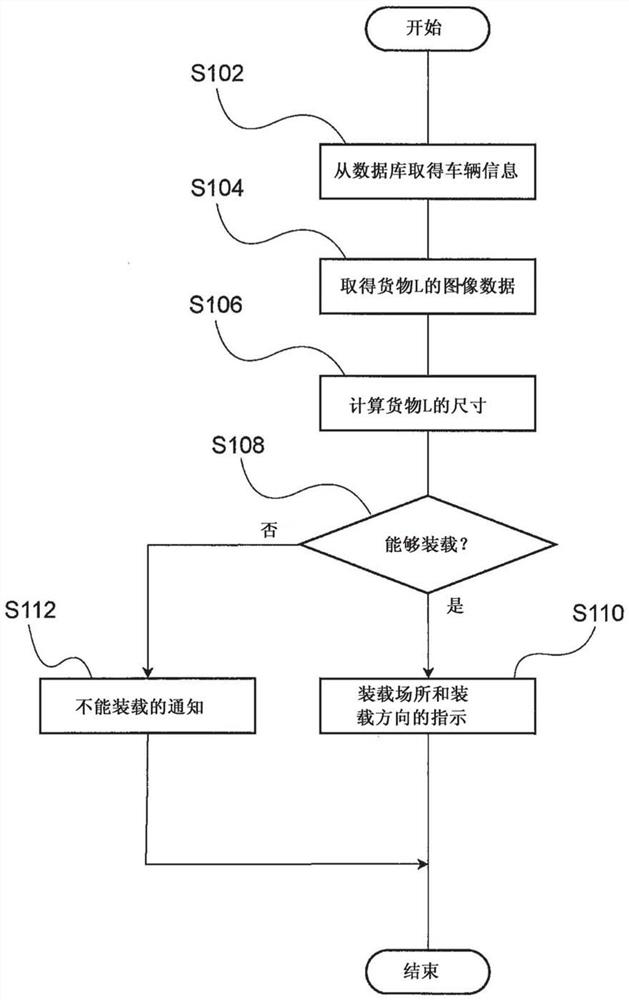
图3是表示第一实施方式中的装载判定处理的流程的一例的流程图。
图4是表示第一实施方式中的移动终端的显示画面的一例的图,并且是表示车型选择的画面的图。
图5是用于说明第一实施方式中的货物的拍摄方法的图。
图6是表示第一实施方式中的移动终端的显示画面的一例的图,并且是表示判定结果的画面的图。
图7是表示第二实施方式所涉及的装载判定系统的功能结构的框图。
图8是表示第二实施方式中的装载判定处理的流程的一例的流程图。
图9是用于说明第二实施方式中的装载空间的拍摄方法的图。
图10是表示第二实施方式中的移动终端的显示画面的一例的图,并且是表示判定结果的画面的图。
图11是表示第一实施方式中的移动终端的显示画面的一例的图,并且是表示装载方法的指示画面的图。
具体实施方式
<第一实施方式>
参照附图,对第一实施方式所涉及的装载判定系统10进行说明。另外,本实施方式的装载判定系统10构成为包括智能手机等移动终端12。
本实施方式的装载判定系统10例如在开车去购物的情况下,能够在购买商品前判断商品是否能够装载于车辆。在本实施方式中,能够在预先将专用的应用程序安装到移动终端12的状态下,通过启动应用程序来使用。
(装载判定系统10的硬件结构)
图1是表示装载判定系统10的硬件结构的框图。如该图1所示,在移动终端12设置有控制部14。控制部14构成为包括CPU(Central Processing Unit:中央处理单元)16、ROM(Read Only Memory:只读存储器)18、RAM(Random Access Memory:随机存取存储器)20、作为存储部的存储器22、通信接口24以及输入输出接口26。各结构通过总线28以能够相互通信的方式连接。
作为处理器的CPU16是中央运算处理单元,执行各种程序,或者控制各部分。即,CPU16从作为内存器的ROM18或作为内存器的存储器22读出程序,并将RAM20作为作业区域来执行程序。CPU16按照在ROM18或存储器22中所记录的程序,进行上述各结构的控制和各种运算处理。
ROM18储存各种程序和各种数据。RAM20作为作业区域而暂时存储程序或数据。存储器22由HDD(Hard Disk Drive:硬盘驱动器)或SSD(Solid State Drive:固态驱动器)构成,并储存包括操作系统在内的各种程序、以及各种数据。在本实施方式中,在ROM18及存储器22存储有用于进行装载判定处理的程序、以及包含与车辆的装载空间相关的数据在内的各种数据等。
通信接口24是供装载判定系统10与未图示的服务器以及其他设备进行通信的接口,例如,使用以太网(注册商标)、LTE、FDDI、Wi-Fi(注册商标)等标准。
输入输出接口26连接有作为显示部的显示画面30、麦克风32、扬声器34和照相机36。显示画面30设置于移动终端12,向使用者显示各种信息(参照图4)。另外,在显示画面30显示由后述的照相机36拍摄到的图像数据。另外,在本实施方式中,作为一例,显示画面30为触摸面板式,并构成为通过触摸显示于显示画面30的内容来受理输入。
麦克风32和扬声器34分别设置于移动终端12,在使用者进行通话时等被使用(参照图4)。另外,麦克风32也可以在使用者通过语音来发出指示时使用,扬声器34也可以在通过语音对使用者进行通知时使用。
照相机36设置于移动终端12,并构成为将由照相机36拍摄到的图像数据显示于显示画面30。
(装载判定系统10的功能结构)
装载判定系统10使用上述硬件资源来实现各种功能。参照图2对由装载判定系统10实现的功能结构进行说明。另外,各功能结构通过由CPU16读出存储在存储器22中的程序并执行该程序来实现。
如图2所示,装载判定系统10构成为,作为功能结构,包括装载空间尺寸取得部40、货物图像取得部42、货物尺寸计算部44、判定部46以及指示部48。
装载空间尺寸取得部40取得车辆中的装载空间的尺寸。具体而言,装载空间尺寸取得部40从预先存储有每个车型的装载空间的尺寸的存储器22取得装载空间的尺寸。即,装载空间尺寸取得部40通过从存储在存储器22中的数据取出与任意车辆所涉及的装载空间的尺寸有关的数据,来取得装载空间的尺寸。这里,在本实施方式中,作为一例,使用者操作移动终端12来输入车辆的信息。
图4是使用者输入车辆的信息时的显示画面30的一例。如该图4所示,在本实施方式中,在启动了移动终端12的应用程序时,选择要使用的车辆的车型和年款的画面被显示于显示画面30。通过由使用者从该列表中选择车辆的车型,能够取得对应的车型的装载空间的尺寸信息。
另外,也可以将与每个车型的装载空间的尺寸有关的数据存储于车辆外部的服务器。在该情况下,装载空间尺寸取得部40通过通信接口24从服务器取得规定的车型中的装载空间的尺寸信息。另外,也可以由使用者使用移动终端12的麦克风32,通过语音来输入车辆的车型及年款等。
如图2所示,货物图像取得部42取得作为装载对象的货物的图像数据。具体而言,货物图像取得部42引导使用者利用照相机36对作为装载对象的货物进行拍摄,并取得所拍摄到的图像数据作为装载对象即货物的图像数据。
图5是使用者对作为装载对象的货物L进行拍摄时的显示画面30的一例。如该图5所示,在本实施方式中,作为一例,在显示画面30利用语句显示有旨在对作为装载对象的货物L进行拍摄的指示。另外,也可以通过从扬声器34输出语音,利用语音对使用者进行指示。
如图2所示,货物尺寸计算部44基于由货物图像取得部42取得的货物L的图像数据来计算货物L的尺寸。作为根据图像数据计算货物L的尺寸的方法,可以采用各种方法。例如,可以使用利用了视差的三角测量的原理来计算货物L的尺寸。另外,也可以通过与预先判明了尺寸的基准器等一起进行拍摄,来计算出货物L的尺寸。在本实施方式中,作为一例,通过使用从斜上方拍摄到的图像数据,能够计算出纵向、横向以及高度方向的尺寸。另外,在根据由货物图像取得部42取得的货物L的图像数据不能检测出货物L的形状的情况下,也可以显示没有正确地拍摄货物L的意思的语句。
如图2所示,判定部46通过将由装载空间尺寸取得部40取得的装载空间的尺寸与由货物尺寸计算部44计算出的货物L的尺寸进行比较,来判定货物L是否能够装载于装载空间。具体而言,将装载空间的宽度方向的尺寸与货物L的横向的尺寸进行比较,并将装载空间的纵深方向的尺寸与货物L的纵向的尺寸进行比较。另外,将装载空间的高度与货物L的高度方向的尺寸进行比较。并且,在货物L的各个尺寸比装载空间的尺寸小的情况下,判定为货物L能够装载于装载空间。另外,在通过调换货物L的纵横使得货物L的各个尺寸比装载空间的尺寸小的情况下,也同样判定为货物L能够装载于装载空间。另外,在本实施方式中,作为一例,在货物L为长方体及立方体以外的形状的情况下,在货物L的三个方向的最大尺寸比装载空间的尺寸小的情况下,判定为能够装载。
如图2所示,指示部48向使用者指示装载货物L的装载场所及装载方向。图6是通过指示部48而显示的移动终端12的显示画面30的一例。如该图6所示,在显示画面30显示为将使用者拍摄到的货物L的图像数据重叠于车辆的装载空间的图像的状态。另外,在显示画面30,通过语句显示有能够装载货物L。
(作用)
接下来,对本实施方式的作用进行说明。
(装载判定处理)
利用图3所示的流程图对判定能否装载货物的装载判定处理的一例进行说明。通过由CPU16从ROM18或存储器22读出程序并展开到RAM20中来执行,由此执行该装载判定处理。
如图3所示,CPU16在步骤S102中从数据库取得车辆信息(装载空间尺寸取得步骤)。在本实施方式中,作为车辆信息,取得车辆的装载空间的尺寸和乘车人数。具体而言,通过由使用者按照移动终端12的引导来选择要使用的车辆的车型及年款,CPU16利用装载空间尺寸取得部40的功能,从数据库取得与使用者所选择的车辆对应的装载空间的尺寸信息。
接着,CPU16在步骤S104中取得货物L的图像数据(货物图像取得步骤)。具体而言,CPU16利用货物图像取得部42的功能,引导使用者利用照相机36对作为装载对象的货物进行拍摄,并取得所拍摄到的图像数据作为装载对象即货物L的图像数据(参照图5)。
接着,CPU16在步骤S106中计算货物L的尺寸(货物尺寸计算步骤)。具体而言,CPU16利用货物尺寸计算部44的功能,基于在步骤S104中取得的货物L的图像数据来计算货物L的尺寸。然后,CPU16转移到步骤S108的处理。
CPU16在步骤S108中对货物L是否能够装载于装载空间进行判断(判定步骤)。具体而言,利用判定部46的功能,通过将在步骤S102中取得的装载空间的尺寸与在步骤S106中计算出的货物L的尺寸进行比较,来判定货物L是否能够装载于装载空间。此时,在具备后座的车辆中,如果在步骤S102中输入了乘车人数为一人或两人,则也可以通过放倒后座来扩大装载空间,由此对能否装载货物L进行判定。另外,在为三排座椅的车辆的情况下,如果乘车人数小于5人,则也可以通过放倒第三排的座椅来扩大装载空间,由此对能否装载货物L进行判定。
CPU16在步骤S108中判断为能够装载货物L的情况下,转移到步骤S110的处理。另外,CPU16在判断为不能装载货物L的情况下,转移到步骤S112的处理。
CPU16在步骤S110中进行货物L的装载场所及装载方向的指示。具体而言,CPU16利用指示部48的功能,使移动终端12的显示画面30将货物L的图像数据以与车辆的装载空间的图像重叠的状态进行显示,由此进行货物L的装载场所及装载方向的指示(参照图6)。然后,CPU16结束装载判定处理。
另一方面,在不能装载货物L的情况下,CPU16在步骤S112中进行不能装载的通知。具体而言,CPU16通过使移动终端12的显示画面30显示不能装载的意思的语句来对使用者进行通知。另外,CPU16也可以在显示画面30显示一看就知道不能装载的记号等,例如,可以显示×字标记(cross mark)。另外,也可以利用语音对使用者通知不能装载的意思,还可以一并进行基于向显示画面30的显示和语音的通知。然后,CPU16结束装载判定处理。
如以上所述,在本实施方式所涉及的装载判定系统10中,通过使用货物L的图像数据来计算货物L的尺寸,即使在作为装载对象的货物L的尺寸未被预先登记的情况下,使用者也能够判断能否装载货物L。即,能够判定尺寸未知的货物L是否能够装载于车辆。
另外,在本实施方式中,通过利用装载空间尺寸取得部40的功能来读出存储在存储器22中的车辆的尺寸信息,由此取得装载空间的尺寸。由此,不需要用于测量装载空间的尺寸的装置等。
而且,在本实施方式中,利用指示部48的功能来向使用者指示货物L的装载场所及装载方向。由此,使用者能够容易地掌握货物L的装载方法。其结果,能够缩短货物L的装载所需的时间。
<第二实施方式>
接下来,参照附图对第二实施方式所涉及的装载判定系统50进行说明。另外,对于与第一实施方式相同的结构标注相同的标号并适当省略说明。另外,本实施方式的装载判定系统50的硬件结构与第一实施方式相同(参照图1)。
(装载判定系统50的功能结构)
参照图7对由装载判定系统50实现的功能结构进行说明。另外,各功能结构通过由CPU16读出存储在存储器22中的程序并执行该程序来实现。
如图7所示,装载判定系统50构成为,作为功能结构,包括装载空间图像取得部52、装载空间尺寸计算部54、货物图像取得部42、货物尺寸计算部44、判定部46以及指示部48。即,代替第一实施方式的装载空间尺寸取得部40,具备装载空间图像取得部52和装载空间尺寸计算部54,装载空间尺寸计算部54相当于本公开的装载空间尺寸取得部。
装载空间图像取得部52取得装载货物L的车辆V的装载空间的图像数据。具体而言,装载空间图像取得部52引导使用者利用照相机36对装载空间进行拍摄,并取得所拍摄到的图像数据作为装载空间的图像数据。
图9是使用者对车辆V的装载空间进行拍摄时的显示画面30的一例。如该图9所示,在本实施方式中,作为一例,在显示画面30利用语句显示有旨在对作为装载空间的行李箱进行拍摄的指示。另外,也可以通过从扬声器34输出语音,利用语音对使用者进行指示。
如图7所示,装载空间尺寸计算部54基于由装载空间图像取得部52取得的装载空间的图像数据来计算装载空间的尺寸。另外,根据图像数据计算装载空间的尺寸的方法可以采用与上述的货物尺寸计算部44相同的方法。
这里,如图9所示,在由装载空间图像取得部52取得的装载空间的图像数据中包含货物LA的情况下,即,在已经堆积有其他货物LA的情况下,考虑该货物LA来计算装载空间的尺寸。即,装载空间尺寸计算部54在计算出装载空间的整体的尺寸后,将从该整体的尺寸减去货物LA的尺寸而得到的尺寸作为装载空间的尺寸。
在判定部46中,通过将由装载空间尺寸计算部54计算出的装载空间的尺寸与由货物尺寸计算部44计算出的货物L的尺寸进行比较,来判定货物L是否能够装载于装载空间。具体而言,在货物L的各个尺寸比装载空间的尺寸小的情况下,判定为货物L能够装载于装载空间。另外,在通过调换货物L的纵横使得货物L的各个尺寸比装载空间的尺寸小的情况下,也同样判定为货物L能够装载于装载空间。另外,在本实施方式中,作为一例,在货物L为长方体及立方体以外的形状的情况下,在货物L的三个方向的最大尺寸比装载空间的尺寸小的情况下,判定为能够装载。
在由判定部46判定为货物L不能装载于装载空间的情况下,如图10所示,在移动终端12的显示画面30显示不能装载货物L的意思的语句。另外,在本实施方式中,作为一例,通过将货物L的图像数据重叠于装载空间,并且还显示×字标记(cross mark),使用者能够一目了然地确认不能装载货物L的情况。
在能够装载货物L的情况下,指示部48向使用者指示货物L的装载场所及装载方向。另一方面,在货物L不能装载于装载空间的情况下,如图11所示,指示部48建议用于装载货物L的方法。在图11中,由于通过放倒第二排座椅能够装载货物L,因此在显示画面30显示旨在放倒第二排座椅的指示。另外,在显示画面30进行在放倒后的第二排座椅上装载有货物L的状态的显示。
(作用)
接下来,对本实施方式的作用进行说明。
(装载判定处理)
利用图8所示的流程图对判定能否装载货物的装载判定处理的一例进行说明。通过由CPU16从ROM18或存储器22读出程序并展开到RAM20中来执行,由此执行该装载判定处理。
如图8所示,CPU16在步骤S202中取得装载空间的图像数据。具体而言,CPU16利用装载空间图像取得部52的功能,引导使用者利用照相机36对装载空间进行拍摄,并取得所拍摄到的图像数据作为装载空间的图像数据(参照图9)。
接着,CPU16在步骤S204中计算装载空间的尺寸。具体而言,CPU16利用装载空间尺寸计算部54的功能,基于在步骤S202中取得的装载空间的图像数据来计算装载空间的尺寸(装载空间尺寸取得步骤)。在此,在图9中,由于在装载空间已经堆积有货物LA,因此CPU16减去该货物LA的尺寸来计算装载空间的尺寸。然后,CPU16转移到步骤S206的处理。
CPU16在步骤S206中取得货物L的图像数据(货物图像取得步骤)。具体而言,CPU16利用货物图像取得部42的功能,引导使用者利用照相机36对作为装载对象的货物进行拍摄,并取得所拍摄到的图像数据作为装载对象即货物L的图像数据(参照图5)。
接着,CPU16在步骤S208中计算货物L的尺寸(货物尺寸计算步骤)。具体而言,CPU16利用货物尺寸计算部44的功能,基于在步骤S206中取得的货物L的图像数据来计算货物L的尺寸。然后,CPU16转移到步骤S210的处理。
CPU16在步骤S210中对货物L是否能够装载于装载空间进行判断(判定步骤)。具体而言,利用判定部46的功能,通过将在步骤S204中计算出的装载空间的尺寸与在步骤S208中计算出的货物L的尺寸进行比较,来判定货物L是否能够装载于装载空间。
CPU16在步骤S210中判断为能够装载货物L的情况下,转移到步骤S212的处理。另外,CPU16在判断为不能装载货物L的情况下,转移到步骤S214的处理。
CPU16在步骤S212中进行货物L的装载场所及装载方向的指示。具体而言,CPU16利用指示部48的功能,使移动终端12的显示画面30将货物L的图像数据以与车辆的装载空间的图像重叠的状态进行显示,由此进行货物L的装载场所及装载方向的指示。然后,CPU16结束装载判定处理。
另一方面,在不能装载货物L的情况下,CPU16在步骤S214中进行不能装载的通知。具体而言,CPU16通过使移动终端12的显示画面30显示不能装载的意思的语句来对使用者进行通知。另外,CPU16也可以在显示画面30显示一看就知道不能装载的记号等,例如,可以显示×字标记(cross mark)。另外,也可以利用语音对使用者通知不能装载的意思,还可以一并进行基于向显示画面30的显示和语音的通知。然后,CPU16结束装载判定处理。
如上所述,在本实施方式所涉及的装载判定系统50中,仅通过照相机36对装载空间进行拍摄,就能够取得装载空间的尺寸。由此,在取得装载空间的尺寸时不需要车辆的信息。即,即使在租借车辆等车辆的信息未知的情况下,也能够容易地取得装载空间的尺寸。
另外,在本实施方式中,即使在车辆的装载空间预先装载有货物LA的情况下,也能够容易地判定能否装载作为装载对象的货物L。其他的作用与第一实施方式相同。
以上,对第一实施方式涉及的装载判定系统10及第二实施方式涉及的装载判定系统50进行了说明,但在不脱离本公开的主旨的范围内,能够以各种方式来实施,这是不言而喻的。例如,在上述实施方式中,使用安装于移动终端12的应用程序进行了判定,但并不限定于此。例如,也可以在构成车辆的ECU(Electronic Control Unit:电子控制单元)的存储器中存储程序,并由该ECU进行判定。在该情况下,例如也可以预先将与车辆的装载空间的尺寸有关的信息存储于ECU的存储器。另外,如果构成为通过通信接口24等将使用者利用移动终端12的照相机36拍摄到的货物L的图像数据发送给ECU,则能够由ECU进行货物L的尺寸与装载空间的尺寸的比较。
另外,在上述实施方式中,作为用于取得货物的图像数据及装载空间的图像数据等的拍摄装置,使用了移动终端12的照相机36,但并不限定于此。例如,也可以使用尺寸测量用的专用的光学照相机等。
而且,也可以由CPU16以外的各种处理器执行上述实施方式中由CPU16读入程序并执行的装载判定处理。作为该情况下的处理器,可例示出FPGA(Field-Programmable GateArray:现场可编程门阵列)等在制造后能够变更电路结构的PLD(Programmable LogicDevice:可编程逻辑器件)、ASIC(Application Specific Integrated Circuit:专用集成电路)等具有为了执行特定的处理而专门设计的电路结构的处理器即专用电路等。另外,也可以利用上述各种处理器中的一个来执行装载判定处理,还可以利用相同种类或不同种类的两个以上的处理器的组合(例如,多个FPGA、以及CPU与FPGA的组合等)来执行装载判定处理。另外,更具体而言,上述各种处理器的硬件结构是将半导体元件等电路元件组合而成的电路。
另外,在上述实施方式中,采用了将各种数据存储于存储器22的结构,但并不限定于此。例如,也可以将CD(Compact Disk:光盘)、DVD(Digital Versatile Disk:数字通用盘)以及USB(Universal Serial Bus:通用串行总线)存储器等设为作为非暂时性记录介质的存储部。在该情况下,可以将各种程序和数据等存储于这些非暂时性记录介质,并使CPU16等处理器执行这些程序和数据。
- 装载判定系统、装载判定方法以及非暂时性存储介质
- 驾驶行为判定装置、判定方法及非暂时性存储介质