一种医用刨刀的控制系统及医用刨削器
文献发布时间:2023-06-19 11:21:00
技术领域
本发明实施例涉及医疗器械技术领域,尤其涉及一种医用刨刀的控制系统及医用刨削器。
背景技术
在现有技术中,进行耳、鼻、喉头、颈骨和关节等体内或体外组织切除的手术时,需要通过刨刀等手术刀切除病变组织或多余的组织;而耳鼻喉等狭小空间以及体内进行的手术不同于其他部位的手术,在进行手术时由于空间的局限和视觉局限,往往会出现切除不准确或不彻底,手术过程效率低,创口大且出血多,术后恢复周期较长,增加患者的痛苦的同时增加治疗成本。因此,需要一种能够适用于狭小空间和体内进行手术的器械,使用时能够彻底和准确的切除病变组织和多余组织,手术过程效率高,创口合适且尽量减少出血,缩短术后恢复周期,减轻患者的痛苦的同时降低治疗成本。
然而现有技术的刨刀控制系统在手术过程中存在加工难度大,响应速度慢,刨刀使用寿命短等问题,严重影响手术效率,给操作人员和患者带来不便。
发明内容
本发明实施例提供一种医用刨刀的控制系统及医用刨削器,以实现医用刨刀的正常使用,提高手术效率。
第一方面,本发明实施例提供了一种医用刨刀的控制系统,控制系统包括:控制模块、人机交互模块、负压吸引模块和启停控制模块;
所述人机交互模块、所述负压吸引模块和所述启停控制模块分别与所述控制模块电连接,所述控制模块与所述医用刨刀的刨刀电机电连接,所述控制模块用于根据所述人机交互模块和所述启停控制模块的输入信息,分别向所述负压吸引模块和所述刨刀电机输出工作运行信息,以控制所述医用刨刀的工作状态;
所述控制模块还用于在所述医用刨刀的刨刀本体取出之后,控制所述人机交互模块显示所述刨刀本体的取出信息,并基于用户在所述人机交互模块上的控制指令控制所述负压吸引模块是否泄压。可选的,所述负压吸引模块的工作开始时间先于所述医用刨刀的刨刀本体的工作开始时间。
可选的,所述控制系统还包括封装壳体;
所述控制模块和所述负压吸引模块均设置于所述封装壳体内部;
所述人机交互模块设置于所述封装壳体的第一表面;
所述启停控制模块设置于所述封装壳体外部。
可选的,所述控制系统还包括启停信号接口,所述启停信号接口可插拔的设置于所述封装壳体的第一表面,所述启停控制模块通过所述启停信号接口与所述控制模块电连接。
可选的,所述控制系统还包括工作运行信息接口,所述工作运行信息接口设置于所述封装壳体表面,所述控制模块通过所述工作运行信息接口与所述刨刀电机电连接。
可选的,所述控制系统还包括与所述控制模块电连接的夹管阀,所述夹管阀可伸缩的设置于所述封装壳体的第二表面,用于固定与所述负压吸引模块相连的吸引软管。
可选的,所述控制系统还包括进气口和排气口,所述进气口和所述排气口均设置于所述封装壳体的第三表面。
可选的,所述启停控制模块包括脚踏开关;所述脚踏开关还包括第一级开关和第二级开关,所述控制模块用于通过所述第一级开关控制所述负压吸引模块的工作状态;所述控制模块还用于通过所述第二级开关用于控制所述刨刀电机的工作状态。
可选的,所述控制系统还包括控制单元、PWM调节单元、逆变电桥单元、霍尔信号采集单元和电流信号采集单元;所述PWM调节单元、所述霍尔信号采集单元、所述电流信号采集单元均与所述控制单元电连接;所述逆变电桥单元分别与所述PWM调节单元和所述刨刀电机电连接。
第二方面,本发明实施例还提供了一种医用刨削器,包括:任一项所述的控制系统,还包括医用刨刀;
所述医用刨刀包括刨刀本体和刨刀电机,所述刨刀电机分别与所述控制系统和所述刨刀本体电连接。
本发明通过提供一种医用刨刀的控制系统,该控制系统包括:控制模块、人机交互模块、负压吸引模块和启停控制模块;人机交互模块、负压吸引模块和启停控制模块分别与控制模块电连接,控制模块与医用刨刀的刨刀电机电连接,控制模块用于根据人机交互模块和启停控制模块的输入信息,分别向负压吸引模块和刨刀电机输出工作运行信息,以控制负压吸引模块和医用刨刀的工作状态;控制模块还用于在医用刨刀的刨刀本体取出之后,控制人机交互模块显示刨刀本体的取出信息,并基于用户在人机交互模块上的控制指令控制负压吸引模块是否泄压。通过控制系统的合理控制,实现医用刨刀的正常工作,保证医用刨刀的应用高效率和高精确度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做一简单地介绍,显而易见地,下面描述中的附图虽然是本发明的一些具体的实施例,对于本领域的技术人员来说,可以根据本发明的各种实施例所揭示和提示的器件结构,驱动方法和制造方法的基本概念,拓展和延伸到其它的结构和附图,毋庸置疑这些都应该是在本发明的权利要求范围之内。
图1为本发明实施例一提供的一种医用刨刀的控制系统的结构示意图;
图2为本发明实施例一提供的封装壳体内部的部分结构示意图;
图3为本发明是实施例一提供的一种人机交互模块的部分图标示意图;
图4为本发明实施例一提供的封装壳体的第三表面的结构示意图;
图5为本发明实施例一提供的另一种医用刨刀的控制系统的结构示意图;
图6为本发明实施例二提供的一种医用刨削器的结构示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,以下将参照本发明实施例中的附图,通过实施方式清楚、完整地描述本发明的技术方案,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例所揭示和提示的基本概念,本领域的技术人员所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
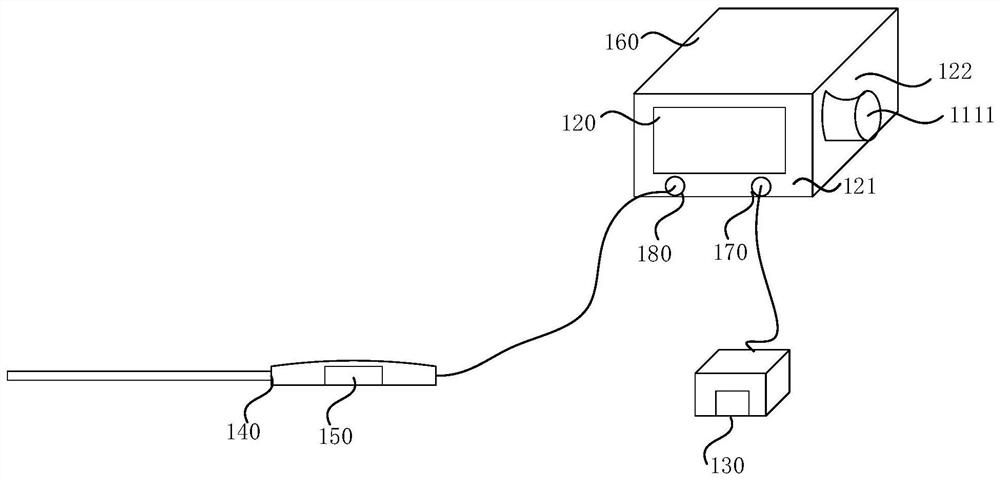
图1为本发明实施例一提供的一种医用刨刀的控制系统的结构示意图,图2为本发明实施例一提供的封装壳体内部的部分结构示意图;如图1和图2所示,该控制系统包括:控制模块110、人机交互模块120、负压吸引模块111和启停控制模块130;
人机交互模块120、负压吸引模块111和启停控制模块130分别与控制模块110电连接,控制模块110与医用刨刀140的刨刀电机150电连接,控制模块110用于根据人机交互模块120和启停控制模块130的输入信息,分别向负压吸引模块和刨刀电机150输出工作运行信息,以控制负压吸引模块111和医用刨刀140的工作状态;
控制模块110还用于在医用刨刀140的刨刀本体取出之后,控制人机交互模块显示刨刀本体的取出信息,并基于用户在人机交互模块上的控制指令控制负压吸引模块是否泄压。其中,控制模块110可以为一个或多个集成电路或微处理器,用于协调整个系统的运行,对人机交互模块120和启停控制模块130的输入信息进行接收、处理和输出,以实现对刨刀电机150的转速控制,进而实现医用刨刀140的刨刀本体的转动工作。控制模块110还可以根据各个模块的信息反馈至人机交互模块120,以提醒用户整个控制系统的状态和故障信信息。刨刀电机150可以为带有转子位置霍尔传感器的BLDC无刷直流电机,无刷直流电机通过霍尔传感器来换向。刨刀电机150的工作运行信息包括正转加速过程信息、正转匀速过程信息、正转减速过程信息、反转加速过程信息、反转匀速过程信息和反转减速过程信息中的至少一种,工作运行信息与人机交互模块120的人为设定有关,可根据实际需求进行人为设定。启停控制模块130为控制整个控制系统开启或关断的总开关,可以为脚踏开关或是按钮开关等,以实现对控制系统的控制,操作过程方便快捷。
进一步的,人机交互模块120可以为触控显示屏或触摸按键,用于控制系统和操作人员之间交互和信息交换的媒介,输入相应工作运行信息,传输至控制模块进行信息处理,进而控制刨刀电机150运转。优选的,人机交互模块120为触控显示屏,可通过RS232总线与控制模块电连接形成通信,方便为用户提供图形用户界面,显示当前医用刨刀的控制系统的运行状态、信息,提供档位调节功能;人机交互模块120还存在中英文切换功能,满足不同用户的使用需求。人机交互模块120设置有预设转速档位供用户使用,触控屏会显示预设的转速档位以及医用刨刀工作状态下的实际转速档位变化,转速档位可根据用户的实际需求随时调整。同时,对于控制模块110检测到启停信号接口170未接入启停控制模块130、工作运行信息接口170未接入医用刨刀140的刨刀电机150、负压吸引模块111的负压传感器出现故障、刨刀电机150出现故障、启停控制模块出现故障,人机交互模块120均会进行故障及时提醒,方便用户及时了解情况,节约用户时间,保证控制系统的使用寿命。
根据控制模块110接收人机交互模块120的输入信息,负压吸引模块111包括8个档位,人机交互模块120对负压吸引模块111的档位信息进行显示,示例性的,在负压吸引模块111未启动前,人机交互模块120上的字符显示为白色;负压吸引模块111启动后,档位位于0-6档位之间,人机交互模块120上的字符显示为紫色;档位位于7-8档位时,负压吸引模块111已经到达工作状态,人机交互模块120上的字符显示为绿色;使负压吸引模块111为医用刨刀140正常工作提供需要的负压环境,负压吸引模块111包括真空泵和负压传感器,真空泵用于进行负压环境的形成;负压传感器用于感应负压环境的实时压力值,反馈至控制模块110,控制模块110控制真空泵维持负压环境的压力值在需要的负压值范围,负压值可以为-70±10kPa。
图3为本发明实施例一提供的一种人机交互模块的部分图标示意图,如图3所示,继续参考图1和图2,当医用刨刀140的控制系统完成操作,刨削电机150停止转动,与刨削电机150电连接的医用刨刀140的刨刀本体停止转动,医用刨刀140的刨刀本体的工作状态停止,刨刀本体取出;控制模块110根据刨刀本体当前的工作状态反馈至人机交互模块120,人机交互模块120会显示警示信息,基于用户在人机交互模块120上的控制指令,控制模块110控制负压吸引模块111是否泄压。若确定刨削本体取出,则用户按下确认按钮,负压吸引模块111停止工作,负压吸引模块111的真空泵停止工作,负压环境解除,跳转至控制系统未开始工作的启动界面;若刨削本体未取出,则用户按下取消按钮,返回至当前工作状态的工作界面。通过对医用刨刀140的刨刀本体的工作状态进行用户确认,有效保证医用刨刀使用过程的安全性,增加用户的使用体验感。
可选的,负压吸引模块111的工作开始时间先于医用刨刀140的刨刀本体的工作开始时间。
其中,负压吸引模块111的工作开始时间先于医用刨刀140的刨刀本体的工作开始时间,负压吸引模块111先开始工作形成负压环境,在负压作用下可执行吸引动作,再使医用刨刀140的刨刀本体进入工作状态,二者相互独立进行控制,有利于提高医用刨刀的控制系统的安全性。
可选的,控制系统还包括封装壳体160;
控制模块110和负压吸引模块111设置于封装壳体160内部;
人机交互模块120设置于封装壳体160的第一表面121;
启停控制模块130设置于封装壳体160外部。
其中,如图1所示,控制模块110作为控制系统的核心结构内置于封装壳体160内部;负压吸引模块111也设置与封装壳体160内部;人机交互模块120外置于封装壳体160的第一表面121,有利于操作人员进行刨刀电机150的工作运行信息的输入,操作方便;启停控制模块130设置于封装壳体160外部,启停控制模块130与封装壳体160相互独立,可通过可弯曲的控制线缆进行电连接。
可选的,控制系统还包括启停信号接口170,启停信号接口170可插拔的设置于封装壳体160的第一表面121,启停控制模块130通过启停信号接口170与控制模块110电连接。
其中,启停信号接口170设置于封装壳体160表面,用于启停控制模块130与控制模块110电连接,实现启停控制模块130发出的启停控制信号传输至控制模块110,控制整个控制系统的开启或关断。启停信号接口170可插拔设置于封装壳体160表面,有利于启动控制模块130的移动,随时与控制模块110断开连接。
可选的,控制系统还包括工作运行信息接口180,工作运行信息接口180可插拔的设置于封装壳体160的第一表面121,控制模块110通过工作运行信息接口180与刨刀电机150电连接。
其中,工作运行信息接口180设置于封装壳体160表面,用于控制模块110与刨刀电机150电连接,实现控制模块110发出的控制信号经工作运行信息接口180传输至刨刀电机150,控制刨刀电机150转动。工作运行信息接口180可插拔设置于封装壳体160表面,有利于控制模块110与刨刀电机150的断开连接,方便医用刨刀140与控制模块110在不使用期间的搬运移动,增加灵活性。
可选的,控制系统还包括与控制模块110电连接的夹管阀1111,夹管阀1111可伸缩的设置于封装壳体160的第二表面122,用于固定与负压吸引模块111相连的吸引软管。
图4为发明实施例一提供的封装壳体的第三表面的结构示意图,如图4所示,继续参考图1和图2,可选的,控制系统还包括进气口131和排气口132,进气口131和排气口132均设置于封装壳体160的第三表面123。
其中,医用刨刀140的手柄上还包括吸引软管接口以及吸引开关;吸引软管接口连接吸引软管的一端,吸引软管的另一端连接进气口131,由于夹管阀1111可伸缩的设置于封装壳体160的第二表面,吸引软管的中间端固定于夹管阀1111。吸引开关打开,控制模块可以调节夹管阀1111的伸缩程度,控制负压环境的负压值。排气口132用于在用户利用医用刨刀140的控制系统执行完一次操作后,使负压吸引模块111在负压环境下恢复正常大气压力,方便下次使用。同时刨削电机150设置于医用刨刀140的手柄内,刨刀本体包括内刀具和外刀具,手柄的作用为刨削本体进行电连接后,使刨削电机150与刨刀本体的内刀具形成可靠的电连接,保证刨刀电机150能带动刨刀本体的内刀具转动,并为负压吸引模块提供吸引通道。进一步的,封装壳体160的第三表面123还包括电源插座133和电源开关134,电源插座133通过与外部电源相连,保证整个医用刨刀的控制系统的正常供电;在电源插座133与外部电源连接后,电源开关134的开启或关断,控制是否有电流流入医用刨刀的控制系统,对医用刨刀的控制系统起到安全保险的作用。
可选的,启停控制模块130包括脚踏开关;脚踏开关还包括第一级开关和第二级开关,控制模块用于通过第一级开关控制负压吸引模块的工作状态;控制模块还用于通过所述第二级开关用于控制刨刀电机150的工作状态。
其中,启停控制模块130为脚踏开关,脚踏开关可以通过脚踩或踏来进行控制系统的控制电路的通断,使用在双手不能及的控制电路中以代替或者解放双手,达到及时操作的目的。脚踏开关还包括第一级开关和第二级开关,控制模块110根据第一级开关和第二级开关的通断信息,完成脚踏开关状态信息的输入和传递,进而形成对负压吸引模块111的负压环境调节以及刨刀电机150的转速调节。当医用刨刀的控制系统启动工作状态时,电源开关134启动,人机交互界面120点击启动,负压吸引模块111启动工作,医用刨刀140的控制系统进入准备状态和脚踏开关控制;踩下第一级开关,由负压吸引模块111控制的吸引通道导通;踩下第二级开关,刨刀电机150启动工作,与刨刀电机150电连接的刨刀本体进入设定的工作状态。当医用刨刀140的控制系统停止工作状态时,先释放第二级开关,使刨刀本体停止工作,再释放第一级开关,关闭负压吸引模块,利用排气口132释放医用刨刀140的控制系统的负压,恢复至大气气压,关闭电源开关134,断开电源插座133与外部电源的电连接,完成医用刨刀140的控制系统的关闭。
进一步的,继续参考图1和图2,控制系统还包括急停开关135和风扇112,急停开关135位于封装壳体160的第三表面123,急停开关135和风扇112均与控制模块110电连接;急停开关135用于紧急情况下,使用户方便快捷的关闭负压吸引模块111和刨刀电机150,能在较短时间内停止医用刨刀140的工作,保证安全。风扇112用于对封装壳体160内部的各个部件进行散热,有利于在医用刨刀140的控制系统的工作期间,不会由于温度过高,造成部件发生过热损坏,影响医用刨刀140的正常工作。
图5为本发明实施例一提供的另一种医用刨刀的控制系统的结构示意图,如图5所示,可选的,控制系统还包括控制单元220、PWM调节单元250、逆变电桥单元260、霍尔信号采集单元230和电流信号采集单元240;PWM调节单元250、霍尔信号采集单元230、电流信号采集单元240均与控制单元220电连接;逆变电桥单元260分别与PWM调节单元250和刨刀电机150电连接。
其中,霍尔信号采集模块230用于采集刨刀电机150的霍尔信号,获取刨刀电机150的转速信息;电流信号采集模块140用于采集逆变电桥模块260与刨刀电机150连接路径上的实际电流信息;控制单元220用于接收霍尔信号采集单元230、电流信号采集单元240采集到的信号或信息,并计算处理进行输出至PWM调节单元250,PWM调节单元250的输出信号,以控制逆变电桥模块260输出定子磁场至刨刀电机150,实现刨刀电机150的转速调节,进而调节医用刨刀140的刨刀本体的转动。
本发明实施例通过提供一种医用刨刀的控制系统,该控制系统包括:控制模块、人机交互模块、负压吸引模块、启停控制模块、启停信号接口、工作运行信号接口、进气口、排气口、风扇、急停按钮和电源开关;人机交互模块与控制模块电连接,启停控制模块通过启停信号接口与控制模块电连接控制模块通过工作运行信号接口与医用刨刀的刨刀电机电连接,控制模块用于根据人机交互模块和启停控制模块的输入信息,向负压吸引模块和刨刀电机输出工作运行信息,以控制负压吸引模块和医用刨刀的刨刀本体的工作状态。控制模块还用于在医用刨刀的刨刀本体取出之后,控制人机交互模块显示刨刀本体的取出信息,并基于用户在人机交互模块上的控制指令控制负压吸引模块是否泄压。同时负压吸引模块的工作开始时间先于医用刨刀的刨刀本体的工作开始时间,通过控制系统的合理控制,提高刨刀电机的响应速度,实现医用刨刀的正常工作,保证医用刨刀应用高效率和高精确度。
实施例二
图6为本发明实施例二提供的一种医用刨削器的结构示意图,如图6所示,该医用刨削器包括:上述实施例一提供的任一项的控制系统31,还包括医用刨刀32;
医用刨刀32包括刨刀本体33和刨刀电机150,刨刀电机150分别与控制系统31和刨刀本体33电连接。
由于本实施例提供的医用刨削器包括上述实施例提供的任意的控制系统的相同或相应的有益效果,此处不再赘述。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整、相互组合和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种医用刨刀的控制系统及医用刨削器
- 一种便于更换组件的电切镜外鞘、电切镜及医用刨削器