信息处理设备、信息处理方法和程序
文献发布时间:2023-06-19 11:26:00
技术领域
本公开涉及一种信息处理设备、一种信息处理方法和一种程序。
背景技术
近年来,已经开发了各种具有识别功能的装置。上述装置包括自主移动体,例如,基于情况执行自主运动的机器人。此外,已经提出了许多改变自主移动体可以采取的动作的技术。例如,专利文献1描述了基于动作历史或来自用户的输入来改变这种可能的动作的装置。
引文列表
专利文献
专利文献1:国际公开号00/67961
发明内容
本发明要解决的问题
然而,在专利文献1中描述的发明中,自主移动体能够采取的动作限于预定动作。此外,在自主移动体能够采取的动作改变的情况下,用户并不总是注意到动作的变化。
问题的解决方案
根据本公开,提供了一种信息处理设备,包括:运动控制单元,其控制自主移动体的运动,其中,当发送/接收与自主移动体相关的内部数据时,运动控制单元使自主移动体通过动作来表示内部数据的发送/接收的执行。
此外,根据本公开,提供了一种信息处理方法,包括:使处理器控制自主移动体的运动;并且使处理器当发送/接收与自主移动体相关的内部数据时,使自主移动体通过动作来表示内部数据的发送/接收的执行。
此外,根据本公开,提供了一种用于使计算机用作信息处理设备的程序,信息处理设备包括:运动控制单元,其控制自主移动体的运动,其中,当发送/接收与自主移动体相关的内部数据时,运动控制单元使自主移动体通过动作来表示内部数据的发送/接收的执行。
附图说明
图1是示出根据本公开的实施例的自主移动体10的硬件配置示例的示图;
图2是示出根据本公开的实施例的自主移动体10包括的致动器570的配置示例的示图;
图3是用于说明根据本公开的实施例的自主移动体10包括的每个致动器570的运动的示图;
图4是用于说明根据本公开的实施例的自主移动体10包括的每个致动器570的运动的示图;
图5是用于说明根据本公开的实施例的自主移动体10包括的显示器510的功能的示图;
图6是示出根据本公开的实施例的自主移动体10的运动示例的示图;
图7是示出根据本公开的实施例的自主移动体10的功能配置示例的示图;
图8是用于说明根据本实施例的自主移动体10发送/接收内部数据的整体流程的示图;
图9是用于说明根据相同实施例的自主移动体10发送/接收内部数据的整体流程的示图;
图10A是用于说明根据相同实施例的通过动作来表示与运动控制单元107的识别处理相关的信息的发送/接收的执行的示例的示图;
图10B是用于说明根据相同实施例的通过动作来表示与运动控制单元107的识别处理相关的信息的发送/接收的执行的示例的示图;
图11是用于概念性地说明与根据相同实施例的识别处理相关的特征量的提取的示图;
图12是用于说明根据相同实施例的与数据发送/接收单元105和数据突变单元106的识别处理相关的信息的突变的示例的示图;
图13是用于说明选择表示与根据相同实施例的识别处理相关的信息的发送/接收的每个动作的概率的示例的示图;
图14是用于说明根据相同实施例的与卷积神经网络相关的信息的发送/接收的示图;
图15是用于说明与根据相同实施例的自主移动体10的识别处理相关的信息的发送/接收相关并且与发送/接收的表示相关的操作流程的示例的示图;
图16是用于说明表示根据相同实施例的自主移动体10执行环境地图的发送/接收的动作的示图;
图17是用于说明由根据相同实施例的自主移动体10发送和接收的环境地图和关注度地图的示例的示图;
图18是用于说明与根据相同实施例的自主移动体10的环境地图和关注度地图的发送/接收相关并且与发送/接收的执行的表示相关的操作流程的示例的示图;
图19是用于说明根据相同实施例的通过动作来表示用于自主移动体10的用户识别的特征量的发送/接收的示例的示图;
图20是用于说明根据相同实施例的自主移动体10发送/接收的特征量的示图;
图21是用于说明根据相同实施例的用户识别中的特征量的聚类和数据突变单元106对特征量的突变的示图;
图22是用于说明与根据相同实施例的自主移动体10发送/接收用户特征量相关并且与发送/接收的执行的表示相关的操作流程的示例的示图;
图23是用于说明根据相同实施例的用于执行自主移动体10的运动的信息的发送/接收以及自主移动体10的发送/接收的表示的示例的示图;
图24是用于说明根据相同实施例的用于执行自主移动体10的运动的信息的突变的示例的示图;
图25是用于说明根据相同实施例的用于执行自主移动体10的运动的信息的突变的示例的示图;
图26是用于说明根据相同实施例的用于执行自主移动体10的运动的信息的突变的示例的示图;
图27是用于说明由自主移动体10发送/接收用于执行根据相同实施例的自主移动体10的运动的信息以及与由自主移动体10执行发送/接收相关的表示的流程的示例的示图;
图28是用于说明头戴式显示器表示内部数据的发送/接收的执行的示图。
具体实施方式
下面将参考附图详细描述本公开的优选实施例。注意,在本说明书和附图中,具有基本相同功能配置的组成元件由相同的附图标记表示,因此将省略其重复描述。
注意,将按以下顺序描述实施例。
1.实施例
1.1.自主移动体10的概述
1.2.自主移动体10的硬件配置示例
1.3.自主移动体10的功能配置示例
1.4.具体示例
2.总结
<1.第一实施例>
<<1.1.自主移动体10的概述>>
首先,将描述根据本公开的实施例的自主移动体10的概述。根据本公开的实施例的自主移动体10是信息处理设备,其基于收集的传感器信息来执行情况的估计,并自主选择和执行对应于该情况的各种动作。自主移动体10的一个特征在于,与简单地根据用户的指令命令执行运动的机器人不同,自主移动体10自主地执行被认为对每种情况都是最佳的动作。
注意,根据本公开的实施例的自主移动体10可以是狗型信息处理设备。根据本公开的实施例的自主移动体10的一个特征在于,自主移动体10没有除了通过眼睛运动的情绪表示之外的视觉信息的输出装置或者通过语音的语言传输装置。根据该特征,可以实现更自然的接近真实狗的运动,并减少用户对自主移动体10所具有的功能和外观的不适。
根据本公开的实施例的自主移动体10可以基于内部数据执行预定动作。在此处,内部数据是指例如与识别处理相关的信息和用于使自主移动体10执行运动的信息(该信息也将被称为控制序列数据)。此外,内部数据包括用于执行对应于与识别目标的识别相关的信息的动作的信息。此外,由自主移动体10执行的动作包括自主移动体10自身的运动、包括识别处理的动作等。
在此处,上述控制序列数据(用于使自主移动体10执行运动的信息)是包括与自主移动体10具有的关节部分的旋转位置的时间序列变化、眼球表情及其声音输出相关的控制信号的信息。即,控制序列数据也可以说是用于使自主移动体10实现任意动作的设置数据。
自主移动体10执行识别处理、运动等,从而能够改变存储在该自主移动体10中的内部数据的类型。例如,自主移动体10自主学习第一次遇到的对象,并且变得能够识别该对象。
顺便提及,在设备不具有对用户的明确的信息传输手段的情况下,用户可能难以清楚地掌握设备的状态。例如,自主移动体10具有基于各种内部数据执动作的功能。然而,与安装在智能手机等中的显示功能不同,在表示基于内部数据的动作之前,用户难以确定自主移动体10是否具有内部数据。
此外,可以由每个自主移动体10获取的内部数据的类型可能具有限制,例如,由于诸如自主移动体10的动作范围的限制等因素。因此,对应于采集的动作的变化也是有限的。而且,根据识别目标,学习识别目标可能需要时间。此外,以类似的方式,同样关于自主移动体10的这种运动,例如,手势等,除了为自主移动体10预定的运动之外,学习运动可能有限制。
通过关注上述要点而构思根据本公开的技术思想,其中,自主移动体10获取更多样的内部数据,从而使得用户能够享受自主移动体10,而不会导致用户疲劳。此外,用户掌握自主移动体10对内部数据的发送/接收的执行,从而使得能够更实时地享受自主移动体10的变化。
下面将详细描述实现上述特征的自主移动体10的配置。注意,根据本公开的实施例的自主移动体10可以是在空间中自主移动并执行各种移动的自主移动机器人。自主移动体10可以是例如自主移动机器人,其具有模仿诸如人和狗等动物的形状并且具有移动能力。此外,自主移动体10可以是例如车辆或其他设备,其具有与用户通信的能力。关于根据本公开的实施例的自主移动体10,可以根据目的和角色适当地设计其形状及其能力、期望等水平。
<<1.2.自主移动体10的硬件配置示例>>
接下来,将描述根据本公开的实施例的自主移动体10的硬件配置示例。注意,在下文中,将描述自主移动体10是狗形四足步行机器人的情况,作为示例。
图1是示出根据本公开的实施例的自主移动体10的硬件配置示例的示图。如图1所示,自主移动体10是具有头部、身体、四条腿和尾巴的狗形四足步行机器人。此外,自主移动体10包括头部上的两个显示器510。
此外,自主移动体10包括各种传感器。自主移动体10包括例如麦克风515、相机520、飞行时间(ToF)传感器525、人体传感器530、距离测量传感器535、触摸传感器540、照度传感器545、脚底按钮550和惯性传感器555。
(麦克风515)
麦克风515具有收集环境声音的功能。上述声音包括例如用户的话语和周围环境声音。自主移动体10可以在头部设置有例如四个麦克风。自主移动体10包括这样的多个麦克风515,由此可以以高灵敏度收集在周围环境中产生的声音,并实现声源的定位。
(相机520)
相机520具有对用户和周围环境成像的功能。自主移动体10可以在鼻尖和臀部设置有例如两个广角相机。在这种情况下,放置在鼻尖处的广角相机捕捉对应于自主移动体的前视野(即,狗的视野)的图像,并且在臀部处的广角相机捕捉以上侧为中心的周围区域的图像。例如,基于由放置在臀部的广角相机捕捉的图像,自主移动体10提取天花板等上的特征点,并且可以实现同时定位和映射(SLAM)。
(ToF传感器525)
ToF传感器525具有检测到存在于头部前方的对象的距离的功能。ToF传感器525设置在头部的鼻尖。根据ToF传感器525,可以高精度地检测到各种对象的距离,并且可以实现与包括用户、障碍物等的对象的相对位置相对应的运动。
(人体传感器530)
例如,人体传感器530具有感测用户或用户饲养的宠物的位置的功能。人体传感器530例如放置在胸部。根据人类传感器530,感测到前方存在的移动对象,从而使得可以在移动对象上实现各种运动,例如,对应于诸如兴趣、恐惧和惊讶等情绪的运动。
(距离测量传感器535)
距离测量传感器535具有获取自主移动体10的前地板表面的情况的功能。距离测量传感器535例如放置在胸部。根据距离测量传感器535,可以高精度地检测到与存在于自主移动体10的前地板表面上的对象的距离,并且可以实现与对象的相对位置相对应的运动。
(触摸传感器540)
触摸传感器540具有感测用户接触的功能。触摸传感器540被放置在例如用户可能触摸自主移动体10的区域,例如,头顶、下巴下方和背部。触摸传感器540可以是例如静电电容型或压敏型触摸传感器。根据触摸传感器540,可以感测用户的诸如触摸、轻抚、击打和推动等接触动作,并且可以执行对应于该接触动作的运动。
(照度传感器545)
照度传感器545检测自主移动体10所处的空间中的照度。照度传感器545可以放置在例如头部背面上的尾部底部。根据照度传感器545,可以检测周围的亮度并执行对应于该亮度的运动。
(脚底按钮550)
脚底按钮550具有检测自主移动体10的腿的底面是否与地板接触的功能。为此,脚底按钮550被单独放置在对应于四条腿的脚掌垫的区域。根据脚底按钮550,可以检测自主移动体10和地板表面之间的接触或非接触,并且例如可以掌握自主移动体10已经被用户举起。
(惯性传感器555)
惯性传感器555是6轴传感器,每个传感器检测物理量,例如,头部或身体的速度、加速度和旋转。即,惯性传感器555检测X轴、Y轴和Z轴上的加速度和角速度。惯性传感器555被单独放置在头部和身体上。根据惯性传感器555,可以高精度地检测自主移动体10的头部和身体的运动,并实现对应于该情况的运动控制。
上面已经描述了根据本公开的实施例的自主移动体10包括的传感器的示例。注意,参考图1描述的上述配置仅是示例,自主移动体10可以包括的传感器的配置不限于这种示例。除了上述配置之外,自主移动体10还可以包括例如温度传感器、地磁传感器、红外传感器以及包括全球导航卫星系统(GNSS)信号接收器的各种通信装置。自主移动体10包括的传感器的配置可以根据规格和操作灵活地修改。
随后,将描述根据本公开的实施例的自主移动体10的关节部分的配置示例。图2是根据本公开的实施例的自主移动体10包括的致动器570的配置示例。根据本公开的实施例的自主移动体10总共具有22个旋转自由度,除了图2所示的旋转点之外,两个在耳朵处,两个在尾巴处,一个在嘴处。
例如,自主移动体10在头部具有三个自由度,从而可以同时实现点头运动和倾斜运动。此外,自主移动体10通过设置在臀部中的致动器570再现臀部的摆动运动,从而能够实现更接近真实狗的自然且灵活的运动。
注意,根据本公开的实施例的自主移动体10可以通过例如将1轴致动器和2轴致动器彼此组合来实现上述22个旋转自由度。例如,肘部和腿部的膝部可以采用1轴致动器,肩部和大腿根部可以采用2轴致动器。
图3和图4是用于说明根据本公开的实施例的自主移动体10包括的每个致动器570的运动的示图。参考图3,致动器570通过马达575旋转输出齿轮,并由此能够以任意旋转位置和旋转速度驱动可移动臂590。
参考图4,根据本公开的实施例的致动器570包括后盖571、齿轮箱盖572、控制板573、齿轮箱基座574、马达575、第一齿轮576、第二齿轮577、输出齿轮578、检测磁体579和两个轴承580。
根据本公开的实施例的致动器570可以是例如磁自旋阀巨磁阻(svGMR)。控制板573基于主处理器的控制使马达575旋转,由此功率经由第一齿轮576和第二齿轮577传递到输出齿轮578,从而使得可以驱动可移动臂590。
此外,设置在控制板573上的位置传感器检测与输出齿轮578同步旋转的检测磁体579的旋转角度,从而使得能够高精度地检测可移动臂590的旋转角度,即其旋转位置。
注意,由于磁性svGMR是非接触型的,所以磁性svGMR具有优异的耐久性,并且其在GMR饱和区域中的使用导致由于检测磁体579和位置传感器的距离波动而导致的信号波动的影响较小的优点。
上面已经描述了根据本公开的实施例的自主移动体10包括的致动器570的配置示例。根据上述配置,可以精确地控制自主移动体10包括的关节部分的弯曲和拉伸运动,并且可以精确地检测关节部分的旋转位置。
随后,参考图5,将描述根据本公开的实施例的自主移动体10包括的显示器510的功能。图5是用于说明根据本公开的实施例的自主移动体10包括的显示器510的功能的示图。
(显示器510)
显示器510具有视觉上表示自主移动体10的眼球运动和情绪的功能。如图5所示,显示器510可以表示眼球、瞳孔和眼睑的运动,这些运动对应于情绪和运动。显示器510有意不显示与眼睛运动无关的字符、符号或图像,从而产生接近真实动物(例如,狗)的自然运动。
此外,如图5所示,自主移动体10包括分别对应于右眼和左眼的两个显示器510r和510l。显示器510r和510l通过例如两个独立的有机发光二极管(OLED)来实现。根据OLED,可以再现眼球的弯曲表面,并且与一对眼球由一个平板显示器表示的情况或者两个眼球由两个独立的平板显示器单独表示的情况相比,可以实现更自然的外观。
如上所述,根据显示器510r和510l,可以以高精度和灵活性表示如图5所示的自主移动体10的视线及其情绪。此外,用户能够从在显示器510上显示的眼球的运动直观地掌握自主移动体10的状态。
上面已经描述了根据本公开的实施例的自主移动体10的硬件配置示例。根据上述配置,如图6所示,以高精度和灵活性控制自主移动体10的关节部分和眼球的运动,由此使得可以实现更接近真实生物的运动和情感表示。注意,图6是示出根据本公开的实施例的自主移动体10的运动示例的示图;然而,在图6中,以简化的方式示出了自主移动体10的外部结构,以便在关注自主移动体10的关节部分和眼球的运动的同时进行描述。同样,在以下描述中,有时可以以简化的方式示出自主移动体10的外部结构;然而,根据本公开的实施例的自主移动体10的硬件配置和外部不限于附图所示的示例,并且可以被适当地设计。
<<1.3.自主移动体10的功能配置示例>>
接下来,将描述根据本公开的实施例的自主移动体10的功能配置示例。图7是示出根据本公开的实施例的自主移动体10的功能配置示例的示图。参考图7,根据本公开的实施例的自主移动体10包括输入单元101、识别单元102、学习单元103、存储单元104、数据发送/接收单元105、数据突变单元106、运动控制单元107、通信单元108、驱动单元109和输出单元110。
(输入单元101)
输入单元101具有收集与另一自主移动体10、用户和周围环境相关的各种信息的功能。输入单元101收集例如另一自主移动体10和用户的话语,在周围环境中产生的环境声音,与另一自主移动体10、用户和周围环境相关的图像信息以及各种传感器信息。为此,输入单元101包括图1所示的各种传感器。
(识别单元102)
识别单元102具有基于由输入单元101收集的各种信息来执行与用户、周围环境和自主移动体10的状态相关的各种识别的功能。作为示例,识别单元102可以执行人识别、面部表情和视线识别、对象识别、运动识别、空间区域识别、颜色识别、形状识别、标记识别、障碍物识别、台阶识别、亮度识别等。
注意,识别单元102可以识别另一自主移动体10。识别单元102可以基于由稍后将描述的通信单元108接收的另一自主移动体10的识别信息来识别另一自主移动体10。在此处,自主移动体10的识别信息是指每个自主移动体10特有的信息,其用于识别自主移动体10。此外,自主移动体10可以通过对象识别来识别另一自主移动体10。
(学习单元103)
学习单元103具有学习环境(情况)和动作以及动作对环境的影响的功能。学习单元103例如使用机器学习算法(例如,深度学习)来实现上述学习。注意,学习单元103采用的学习算法不限于上述示例,并且可以被适当地设计。
(存储单元104)
存储单元104具有存储与自主移动体10相关的各种内部数据的功能。存储单元104可以存储与识别目标的识别相关的信息和用于执行与识别目标的识别相关的信息对应的动作的信息,使得两条信息彼此对应。
在此处,与识别处理相关的信息是指例如用于识别处理的类别。此外,存储单元104包括自主移动体10的识别信息。识别信息由稍后描述的识别单元102、数据发送/接收单元105和稍后描述的数据突变单元106使用。
(数据发送/接收单元105)
数据发送/接收单元105具有确定是否执行内部数据的发送/接收的功能。此外,数据发送/接收单元105具有参考存储单元104来确定要发送/接收哪个内部数据的功能。
数据发送/接收单元105可以独立地确定是否发送内部数据以及是否接收内部数据。此外,数据发送/接收单元105可以独立地确定要发送哪个内部数据和要接收哪个内部数据。
此外,数据发送/接收单元105可以基于发送/接收概率值和预定阈值之间的大小关系来确定是否执行内部数据的发送/接收。在此处,发送/接收概率值是用于确定内部数据的发送/接收的值。此外,基于例如与自主移动体10相关的参数和从另一自主移动体10接收的识别信息来计算发送/接收概率值。注意,数据发送/接收单元105可以基于发送/接收概率值来确定要发送/接收哪个内部数据。
在此处,与自主移动体10相关的参数是指例如自主移动体10的特征和年龄、软件版本、剩余电池电量等。例如,自主移动体10的特征可以影响自主移动体10的动作的活跃性。注意,与自主移动体10相关的参数还可以包括指示与用户和另一自主移动体10的关系的信息。例如,提及相遇的次数等,作为指示与用户和另一自主移动体10的关系的信息。
此外,数据发送/接收单元105向其发送/接收内部数据的伙伴可以是例如另一自主移动体10。另一自主移动体10具有的数据发送/接收单元105也可以确定是否执行内部数据的发送/接收。数据发送/接收单元105可以根据另一自主移动体10的数据发送/接收单元105是否已经确定是否执行内部数据的发送/接收来确定执行内部数据的发送/接收。
(数据突变单元106)
数据突变单元106具有在发送/接收由数据发送/接收单元105确定的内部数据时突变内部数据的功能。在此处,突变意味着改变内部数据的一部分。具体来说,突变意味着将内部数据改变为其他变体。
注意,数据突变单元106可以突变要发送的内部数据和接收的内部数据,或者可以突变其中之一。
此外,数据突变单元106可以计算突变概率值,并确定是否对内部数据进行突变。在此处,发送/接收概率值是用于内部数据突变的值。在此处,突变概率值可以基于与自主移动体10相关的参数和另一自主移动体10的识别信息来计算。
数据突变单元106可以基于突变概率值和预定阈值之间的大小关系来确定是否突变内部数据。数据突变单元106可以仅在数据发送/接收单元105确定发送内部数据的情况下计算突变概率值。另一方面,数据突变单元106可以仅在数据发送/接收单元105确定接收内部数据的情况下计算突变概率值。数据突变单元106可以根据要发送/接收的内部数据的类型来确定是否执行突变概率值的计算。
注意,数据突变单元106可以使用与自主移动体10相关的一个或多个参数来计算突变概率值。例如,等式(1)示出了将由相应参数输出并加权的函数彼此相加的结果。
[等式1]
f′(x)=w
接下来,由等式(1)计算的结果被代入概率函数,例如,sigmoid函数,例如,等式(2)。
[等式2]
数据突变单元106可以例如基于概率函数(例如,等式(2))的输出结果和预定阈值之间的大小关系来确定是否突变内部数据。
(运动控制单元107)
运动控制单元107具有基于由识别单元102估计的情况和由学习单元103学习的知识来计划要由自主移动体10执行的动作的功能。此外,运动控制单元107具有基于计划的活动计划来控制驱动单元109和输出单元110的操作的功能。运动控制单元107例如基于上述活动计划来执行致动器570的旋转控制、显示器510的显示控制、扬声器的语音输出控制等。
此外,运动控制单元107具有在发送/接收内部数据时使驱动单元109和输出单元110通过动作来表示内部数据的发送/接收的执行的功能。具体地,运动控制单元107控制驱动单元109和输出单元110,以通过自主移动体10的动作来表示由数据发送/接收单元105确定的内部数据的内容,使得用户能够了解该内容。
注意,表示内部数据的发送/接收的执行的动作可以是用户可以直接理解内部数据的内容的动作,或者可以是用户可以间接理解内部数据的内容的动作。稍后将描述通过自主移动体10的动作的表示的具体示例。
(通信单元108)
通信单元108具有与另一自主移动体10进行信息通信的功能。例如,通信单元108将内部数据等发送到另一自主移动体10。此外,例如,通信单元108从另一自主移动体10接收内部数据。
此外,在识别单元102识别另一自主移动体10的情况下,通信单元108可以向/从另一自主移动体10发送/接收识别信息。
(驱动单元109)
驱动单元109具有基于运动控制单元107的控制来弯曲和拉伸自主移动体10具有的多个关节部分的功能。更具体地,驱动单元109基于运动控制单元107的控制来驱动相应关节部分包括的致动器570。
(输出单元110)
输出单元110具有基于运动控制单元107的控制输出视觉信息和声音信息的功能。为此,输出单元110包括显示器510和扬声器。
上面已经描述了根据本公开的实施例的自主移动体10的功能配置示例。注意,参考图7描述的上述配置仅仅是示例,并且根据本公开的实施例的自主移动体10的功能配置不限于这样的示例。可以根据规格和操作灵活地修改根据本公开的实施例的自主移动体10的功能配置。
此外,自主移动体10能够使用通信单元108与另一自主移动体10通信。注意,自主移动体10可以直接与另一自主移动体10通信,或者可以经由图7所示的网络20与其通信。
此外,尽管图7中未示出,但是存储单元104的一部分可以设置在经由网络20连接到自主移动体10的信息处理服务器上。例如,信息处理服务器可以适当地向/从自主移动体10发送/接收内部数据。
<<1.4.具体示例>>
下面将描述根据本实施例的运动控制单元107的控制的具体示例。首先,将描述自主移动体10发送/接收内部数据的总体流程。图8和图9是用于说明根据本实施例的自主移动体10发送/接收内部数据的整体流程的示例的示图。
参考图8,首先,在识别单元102识别另一自主移动体10的情况下(S1101:是),通信单元108开始与另一自主移动体10的通信(S1002)。另一方面,在识别单元102没有识别出另一自主移动体10的情况下(S1101:否),处理返回到步骤S1101。在执行步骤S1102之后,通信单元108与另一自主移动体10交换识别信息(S1103)。接下来,数据发送/接收单元105基于与自主移动体10相关的参数和另一自主移动体10的识别信息来计算发送/接收概率值(S1104)。
接下来,在发送/接收概率值不大于第一阈值的情况下(S1105:否),处理返回到步骤S1101。另一方面,在发送/接收概率值大于第一阈值的情况下(S1105:是),数据突变单元106基于与自主移动体10相关的参数和另一自主移动体10的识别信息来计算突变概率值(S1106)。
接下来,在突变概率值不大于第二阈值的情况下(S1107:否),处理进行到步骤S1109。另一方面,在突变概率值大于第二阈值的情况下(S1107:是),数据突变单元106在其发送/接收时确定要突变的内部数据(S1108)。
随后,参考图9,首先,在数据发送/接收单元105没有确定发送内部数据的情况下(S1109:否),处理进行到步骤S1114。另一方面,在数据发送/接收单元105已经确定发送内部数据的情况下(S1109:是),数据发送/接收单元105从存储单元104提取要发送的内部数据(S1110)。
接下来,在数据突变单元106没有确定对内部数据进行突变的情况下(S1111:否),处理进行到步骤S1113。另一方面,在数据突变单元106已经确定突变内部数据的情况下(S1111:是),数据突变单元106突变在步骤S1110中提取的内部数据(S1112)。接下来,通信单元108将在步骤S1110中提取的内部数据发送到另一自主移动体10(S1113)。
接下来,在数据发送/接收单元105没有确定接收内部数据的情况下(S1114:否),自主移动体10结束处理。另一方面,在数据发送/接收单元105已经确定接收内部数据的情况下(S1114:是),通信单元108从另一自主移动体10接收内部数据(S1115)。
接下来,在数据突变单元106没有确定对接收的内部数据进行突变的情况下(S1116:否),处理进行到步骤S1118。另一方面,在数据突变单元106已经确定对接收的内部数据进行突变的情况下(S1116:是),数据突变单元106对在步骤S1115中接收的内部数据进行突变(S1117)。接下来,数据发送/接收单元105通过使存储单元104另外改变内部数据来更新在步骤S1115中接收的内部数据(S1118),并且自主移动体10结束该过程。
如上所述,自主移动体10可以执行内部数据的发送/接收和内部数据的突变。注意,上述操作的流程仅仅是一个示例,内部数据的发送/接收和内部数据的突变不限于这样的示例。
下面将在提及具体示例的同时描述自主移动体10的运动控制单元107的控制的细节。首先,将描述发送/接收的内部数据是用于自主移动体10的识别处理的信息的情况。
图10A和图10B是用于说明根据本实施例的通过动作来表示与运动控制单元107的识别处理相关的信息的发送/接收的执行的示例的示图。图10A和图10B示出了自主移动体10A、自主移动体10B和识别目标C1。
注意,作为前提,由于自主移动体10A没有用于对应于识别目标C1的识别处理的信息,所以自主移动体10A处于不能识别出识别目标C1是什么的状态。另一方面,由于自主移动体10B具有用于对应于识别目标C1的识别处理的信息,所以自主移动体10B处于能够识别出识别目标C1是“猫”的状态。
在图10A的上侧,自主移动体10B与识别目标C1相互交互。在此处,自主移动体10B识别出识别目标C1是“猫”。
接下来,在图10A的下侧,自主移动体10A正在接近自主移动体10B和识别目标C1。在此处,自主移动体10A从自主移动体10B接收与识别目标C1的识别处理相关的信息。在此处,与识别处理相关的信息是内部数据的示例。此外,同时,自主移动体10A从自主移动体10B接收用于执行对应于识别目标C1的运动的信息。
在图10B的上侧,自主移动体10A已经完成从自主移动体10B接收与识别目标C1的识别相关的信息。因此,自主移动体10A和自主移动体10B基于用于执行对应于识别目标C1的运动的信息,通过“擦脸运动”来表示信息的发送/接收,该信息与和识别目标C1的识别相关的信息相关。在此处,“擦脸动作”是猫执行的手势(让人联想到猫的手势)。
在此处,用于执行对应于识别目标的运动的信息可以是用于执行用户能够关联识别目标是什么的运动的运动。注意,除了运动之外,例如,可以使用语音来确定识别目标是什么。
接下来,在图10B的下侧,基于与“猫”的识别处理相关的信息(已经从自主移动体10B接收该信息),使得自主移动体10A能够识别出作为另一“猫”的识别目标C2。
如上所述,可以发送/接收与识别目标的识别处理相关的信息和用于执行对应于识别目标的运动的信息。根据这样的功能,自主移动体10可以基于内部数据的发送/接收向用户表示可识别对象的类型的增加。
在此处,作为与识别处理相关的信息的示例,将概念性地描述与识别处理相关的类别。图11是用于概念性地说明与识别处理相关的类别的示图。图11示出了自主移动体10A的特征量提取器REA和类别PA1以及自主移动体10B的特征量提取器REB和类别PB1。
在图11的上侧,示出了自主移动体10A能够识别类别PA1中示出的对象。同样,示出了自主移动体10B能够识别类别PB1中示出的对象。
在此处,自主移动体10A和自主移动体10B发送/接收与识别处理相关的类别,从而可以另外改变识别目标。下面将描述图11的示例。假设自主移动体10A能够识别类别PA1中所示的“狗”。同样,假设自主移动体10B能够识别在类别PB1中示出的“叉子”和“沙发”。
如图11的下侧所示,“狗”类别、“叉子”类别和“沙发”类别由自主移动体10A的数据发送/接收单元105和自主移动体10B的数据发送/接收单元105发送到另一自主移动体10。发送的类别合并。在此处,如自主移动体10A的类别PA2所示,自主移动体10A的识别单元102能够识别“叉子”类别和“沙发”类别。此外,如自主移动体10B的类别PB2所示,自主移动体10B的识别单元102能够识别“狗”类别。
如上所述,执行类别信息的发送/接收,由此可以省去自主移动体10学习新的识别目标的麻烦。
注意,如图11所示,除了添加与识别处理相关的类别之外,自主移动体10的数据发送/接收单元105可以同时执行其他类别的删除。这将在图11下侧的示例中描述。当发送/接收和合并与识别处理相关的类别时,自主移动体10A的数据发送/接收单元105删除已经在类别PA1中呈现的“杯子”类别和“椅子”类别。此外,自主移动体10A的数据发送/接收单元105删除已经存在于类别PA1中的“兔子”类别。
如上所述,不仅执行类别的添加,还执行类别的删除,从而使得能够节省要存储在自主移动体10中的数据量。例如,自主移动体10的数据发送/接收单元105可以在要存储在存储单元104中的类别中优先删除识别单元102不太频繁识别的识别目标类别。另一方面,自主移动体10的数据发送/接收单元105可以仅添加类别,而不删除类别。
顺便提及,可能存在对应于识别目标的多种类型的运动。在此处,将描述由数据发送/接收单元105和数据突变单元106进行的对应于识别目标的动作的确定和突变的示例。图12是用于说明与根据本实施例的数据发送/接收单元105和数据突变单元106的识别处理相关的信息的突变的示例的示图。图12示出了对应于自主移动体10的每个动作(其对应于预定的识别目标)的分数的示图S1,并且示出了自主移动体10能够采取每个动作的概率的示图S2。
根据识别目标计算图12左侧所示的每个动作的分数。在此处,分数是当自主移动体10确定在执行对应于识别目标的动作时要执行哪个动作时使用的值。此外,此处的动作包括“擦脸”的动作,例如,在该动作是对应于猫的识别处理的动作的情况下。除了自主移动体10的动作(手势)之外,例如,包括在自主移动体10变得能够识别猫的情况下搜索猫的动作等。
注意,与识别目标具有高亲和力的动作的分数可以被设置为高于其他动作的分数。在此处,数据发送/接收单元105基于例如等式(3)中所示的软最大值函数将每个分数转换成概率P。在此处,C是用于识别每个动作的数字,并且分数是图12左侧所示的每个动作的分数。
[等式3]
图12右侧所示的概率是用于在表示与识别目标的识别处理相关的信息的发送/接收时选择动作的概率。数据发送/接收单元105基于概率图S2中所示的概率来确定由自主移动体10执行的动作。
在此处,在图12的左侧,数据突变单元106可以基于突变概率值来突变对应于每个动作的分数。具体地,数据突变单元106可以通过使用计算的突变概率值来改变对应于每个动作的分数。数据突变单元106突变每个分数,由此由数据发送/接收单元105确定的动作的概率改变。
如上所述,即使在存在多个自主移动体10的情况下,每个自主移动体10也可以通过不同的动作对相同的识别目标进行表示。根据这样的功能,即使拥有多个自主移动体10的用户也能够享受由每个自主移动体10执行的不同动作。
图13是用于说明选择表示与根据本实施例的识别处理相关的信息的发送/接收的每个动作的概率的示例的示图。如图13的示例所示,通过使用概率,可以确定表示与识别处理相关的信息的发送/接收的动作。
在上面,已经描述了与识别处理相关的类别的发送/接收,作为示例。然而,例如,可以添加甚至在与卷积神经网络相关的信息的发送/接收中也可识别的目标。图14是用于说明根据本实施例的与卷积神经网络相关的信息的发送/接收的示图。图14示出卷积神经网络的概念图CN。
在图14的左侧,示出了要存储为三维量的特征量数据。在图14的中间图中,示出了要应用于特征量数据的三维滤波器。在图14的右侧,示出了三维滤波器的卷积结果。在图14的示例中,卷积的结果可以是二维热图。
自主移动体10的数据发送/接收单元105可以确定过滤信息,作为要发送/接收的内部数据。执行过滤信息的添加或删除,由此自主移动体10的识别单元102可识别的目标(类别)改变。在此处,过滤信息是指与滤波器相关的内核的大小等。
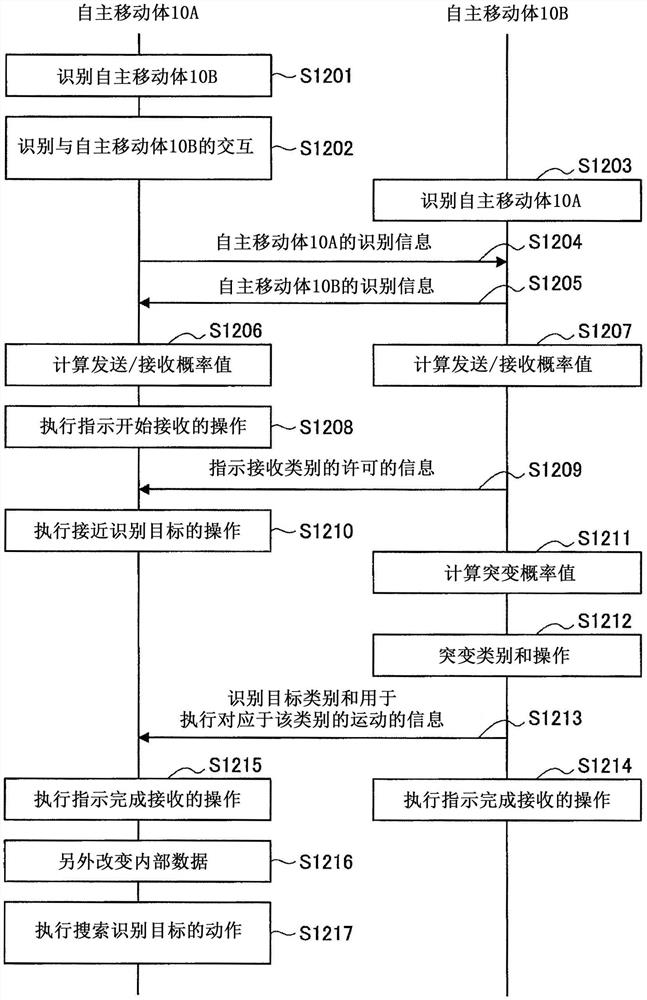
随后,将给出与自主移动体10的识别处理相关的信息的发送/接收相关并且与发送/接收的表示相关的操作流程的示例的描述。图15是用于说明与根据本实施例的自主移动体10的识别处理相关的信息的发送/接收相关以及与发送/接收的表示相关的操作流程的示例的示图。
参考图15,首先,自主移动体10A的识别单元102识别自主移动体10B(S1201)。接下来,自主移动体10A的识别单元102识别到自主移动体10B正在与识别目标交互(S1202)。另一方面,自主移动体10B的识别单元102也识别到自主移动体10A(S1203)。接下来,自主移动体10A的通信单元108向自主移动体10B发送自主移动体10A的识别信息(S1204)。另一方面,自主移动体10B的通信单元108也向自主移动体10A发送自主移动体10B的识别信息(S1205)。
接下来,自主移动体10A的数据发送/接收单元105基于自主移动体10A的参数和自主移动体10B的识别信息来计算发送/接收概率值(S1206)。自主移动体10B的数据发送/接收单元105也基于自主移动体10B的参数和自主移动体10A的识别信息来计算发送/接收概率值(S1207)。接下来,自主移动体10A的运动控制单元107使驱动单元109和输出单元110执行向自主移动体10B指示开始接收与识别目标的识别处理相关的类别的运动(S1208)。
接下来,自主移动体10B的通信单元108向自主移动体10A发送指示接收识别目标类别的许可的信息(S1209)。接下来,自主移动体10A的运动控制单元107控制驱动单元109执行接近识别目标的运动(S1210)。接下来,自主移动体10B的数据突变单元106计算突变概率值(S1211)。接下来,自主移动体10B的数据突变单元106基于在步骤S1211中计算的突变概率值来突变类别和对应于该类别的运动(S1212)。
接下来,自主移动体10B的通信单元108向自主移动体10A发送识别目标类别和用于执行对应于该类别的运动的信息(S1213)。接下来,自主移动体10B的运动控制单元107使驱动单元109和输出单元110执行对应于在步骤S1213中接收的信息的运动(S1215)。此外,自主移动体10A的运动控制单元107还使驱动单元109和输出单元110执行对应于在步骤S1213中发送的信息的运动(S1215)。
接下来,自主移动体10A的数据发送/接收单元105使存储单元104存储在步骤S1213中接收的类别和用于执行对应于该类别的运动的信息,从而更新内部数据(S1216)。接下来,自主移动体10A的运动控制单元107使驱动单元109执行搜索对应于在步骤S1213中接收的类别的识别目标的动作(S1217),并且自主移动体10结束运动。
如上所述,自主移动体10通过该动作表示对应于识别目标的类别的发送/接收,由此用户能够理解自主移动体10已经设置有来自另一自主移动体10的与识别目标相关的信息。
至此,已经描述了与识别目标的识别相关的信息的发送/接收的表示;然而,要发送/接收的信息可以是环境地图。例如,自主移动体10从另一自主移动体10接收环境地图,由此自主移动体10甚至在自主移动体10从未到过的地方变得能够在理解环境的状态下移动。
图16是用于说明表示由根据本实施例的自主移动体10执行环境地图的发送/接收的动作的示图。图16示出了自主移动体10A和自主移动体10B。
当发送/接收环境地图时,自主移动体10的运动控制单元107通过动作进行环境地图的发送/接收的执行的表示,该执行由数据发送/接收单元105完成。具体地,自主移动体10的运动控制单元107控制驱动单元109和输出单元110,使得用户能够理解正在执行预定地点的环境地图的发送/接收。
在图16的示例中,自主移动体10B正在执行对房间内部进行引导的动作,而自主移动体10A正在执行跟随自主移动体10B的动作。如上所述,自主移动体10A跟随自主移动体10B,由此用户能够理解正在执行环境地图的发送/接收。
注意,当自主移动体10发送/接收环境地图时,也可以发送/接收关注度地图,作为额外信息。在此处,关注度地图是指示对预定环境地图具有额外意义的地点的地图信息。具体地,关注度地图是指用于向用户显示具有特殊意义的地点的地图信息,例如,用户可能出现的地点、用户不喜欢自主移动体10进入的地点等。
图17是用于说明将由根据本实施例的自主移动体10发送/接收的环境地图和关注度地图的示例的示图。图17示出了环境地图M1、关注度地图M2和由关注度地图M2修改的环境地图M3。
在图17中,环境地图M1示出了房间的平面图和家具的安装状态。关注度图M2是对应于环境地图M1的地图。
下面将在图17的示例中给出描述。例如,关注地点A1是当自主移动体10进入该地点时用户称赞自主移动体10的地点。此外,例如,关注地点A2是对用户具有特殊意义的地点。此外,关注地点A3是当自主移动体10进入该地点时用户生气的地点。在由关注度地图M2修改的环境地图M3中,修改的地点P1至P3被指示为自主移动体10的限制区域。
通过接收如上所述的环境地图和关注度地图,甚至在自主移动体10第一次来到的地方,自主移动体10也变得能够更安全地移动,此外,自主移动体10变得能够根据每个用户的情况移动。
随后,将给出与自主移动体10的环境地图和关注度地图的发送/接收相关并且与发送/接收的执行的表示相关的操作流程的示例的描述。图18是用于说明与根据本实施例的自主移动体10的环境地图和关注度地图的发送/接收相关并且与发送/接收的执行的表示相关的操作流程的示例的示图。
参考图18,首先,自主移动体10A的识别单元102识别自主移动体10B(S1301)。此外,自主移动体10B的识别单元102也识别自主移动体10A(S1302)。接下来,自主移动体10A的通信单元108向自主移动体10B发送自主移动体10A的识别信息(S1303)。另一方面,自主移动体10B的通信单元108也向自主移动体10A发送自主移动体10B的识别信息(S1304)。
接下来,自主移动体10A的数据发送/接收单元105基于自主移动体10A的参数和自主移动体10B的识别信息来计算发送/接收概率值(S1305)。自主移动体10B的数据发送/接收单元105也基于自主移动体10B的参数和自主移动体10A的识别信息来计算发送/接收概率值(S1306)。接下来,自主移动体10A的运动控制单元107使驱动单元109和输出单元110执行向自主移动体10B指示开始接收环境地图的运动(S1307)。
接下来,自主移动体10B的通信单元108向自主移动体10A发送指示接收环境地图的许可的信息(S1308)。接下来,自主移动体10B的数据突变单元106计算突变概率值(S1309)。接下来,自主移动体10B的数据突变单元106基于在步骤S1309中计算的突变概率值来突变环境地图或关注度图(S1310)。
接下来,自主移动体10B的运动控制单元107使驱动单元109和输出单元110执行对环境地图中所示的地点进行引导的操作(S1311)。此外,自主移动体10A使驱动单元109开始跟随自主移动体10B的运动(S1312)。接下来,自主移动体10B的通信单元108向自主移动体10A发送环境地图和对应于环境地图的关注度地图(S1313)。接下来,自主移动体10A的数据突变单元106基于自主移动体10A的参数和自主移动体10B的识别信息计算突变概率值(S1314)。在此处,自主移动体10A可以基于在步骤S1314中计算的突变概率值来突变环境地图和关注度图。
接下来,自主移动体10A的数据发送/接收单元105使存储单元104存储在步骤S1213中接收的类别和用于执行对应于该类别的运动的信息,从而更新内部数据(S1315)。然后,自主移动体10A和自主移动体10B结束运动。
自主移动体10对环境地图和关注度地图的发送/接收通过如上所述的动作来表示,由此用户能够理解自主移动体10已经设置有来自另一自主移动体10的与新地点相关的信息。
顺便提及,作为内部数据的示例,还提到了用于用户识别的特征量。图19是用于说明通过动作来表示用于自主移动体10的用户识别的特征量的发送/接收的示例的示图。图19示出了自主移动体10A、自主移动体10B和用户UA。
当发送/接收特征量时,自主移动体10的运动控制单元107通过动作进行特征量的发送/接收的执行的表示,该执行由数据发送/接收单元105完成,用于用户识别。具体地,自主移动体10的运动控制单元107控制驱动单元109和输出单元110,使得可以理解与预定用户的识别相关的信息的发送/接收的执行。
注意,自主移动体10的数据突变单元106可以突变用户的特征量。在图19的示例中,自主移动体10B的通信单元108向自主移动体10A发送由自主移动体10B的数据突变单元106突变的用户UA的特征量。
在图19的上侧的示例中,自主移动体10A处于不能识别用户UA的状态,自主移动体10B处于识别自主移动体10A的状态。在图19的下侧的示例中,自主移动体10B将用户UA的特征量发送到自主移动体10A,并且自主移动体10A开始搜索用户UA并发现用户UA。然而,自主移动体10A搜索“戴眼镜”的用户UA,并且没有完全识别用户UA。
如上所述,自主移动体10从另一自主移动体10接收用于用户识别的特征量,从而可以缩短用户识别所需的学习时间。此外,用于用户识别的特征量是突变的,因此可以实现逐渐记忆用户的外观的动作。
随后,将描述将由自主移动体10发送/接收的这些特征量。图20是用于说明由根据本实施例的自主移动体10发送和接收的特征量的示图。图20示出了对应于相应用户A至D的特征量FA至FD。
注意,每个自主移动体10从具有相同特征量计算过程的另一自主移动体10接收用户的特征量,并且另外更新用户的相应特征量数据,从而变得能够识别用户。在图20上侧的示例中,自主移动体10A具有用户A的特征量FA和用户B的特征量FB。另一方面,自主移动体10B具有用户C的特征量FC和用户D的特征量FD。
在此处,如图20的下侧的示例所示,当自主移动体10B将用户C的特征量FC发送到自主移动体10A时,自主移动体10A变得能够基于用户C的特征量FC来识别用户C。
通常,使用特征量的用户的学习需要使用在各种情况下拍摄的用户的图像。然而,如上所述发送/接收特征量本身,因此可以省去再次学习用户特征的麻烦。
顺便提及,在用户识别中,即使用户是相同的,其外观也可能由于环境而改变,例如,相机的照度和方向、用户化妆或戴眼镜的情况等。因此,可以对这些特征量进行聚类,以便在各种情况下更准确地识别同一用户。注意,数据突变单元106可以突变要在聚类特征量中突变的特征量。图21是用于说明根据本实施例的用户识别中的特征量的聚类和数据突变单元106对特征量的突变的示图。
图21示出了特征量图FM。特征量图FM示出了用户A的聚类特征量的聚类FAG、用户B的特征量的聚类FBG和用户C的特征量的聚类FCG。
在此处,识别单元102可以根据所获取的特征量属于哪个聚类来识别用户。在图21左侧的示例中,识别单元102可以基于这种获取的特征量FA1属于用户A的聚类FAG这样的事实将识别出的用户识别为用户A。
注意,基于特征量地图FM,数据突变单元106可以在发送/接收特征量时突变特征量。将描述图21右侧的示例。例如,在由识别单元102获取的特征量属于用户A的特征量的聚类FAG的情况下,考虑将用户A的特征量的聚类FAG的中心FAO和用户B的特征量的聚类FBG的中心FBO彼此连接的直线。接下来,数据突变单元106选择直线上的任意一点,将最接近所选点FP的特征量FB2定义为识别的特征量,并由此可以执行突变。
随后,将给出与通过自主移动体10发送/接收用户的特征量相关并且与发送/接收的执行的表示相关的操作流程的示例的描述。图22是用于说明与根据本实施例的自主移动体10的用户特征量的发送/接收相关并且与发送/接收的执行的表示相关的操作流程的示例的示图。
参考图22,首先,自主移动体10B的识别单元102识别自主移动体10A(S1401)。此外,自主移动体10A的识别单元102也识别自主移动体10B(S1402)。接下来,自主移动体10A的通信单元108向自主移动体10B发送自主移动体10A的识别信息(S1403)。另一方面,自主移动体10B的通信单元108也向自主移动体10A发送自主移动体10B的识别信息(S1404)。
接下来,自主移动体10A的数据发送/接收单元105基于自主移动体10A的参数和自主移动体10B的识别信息计算发送/接收概率值(S1405)。自主移动体10B的数据发送/接收单元105也基于自主移动体10B的参数和自主移动体10A的识别信息来计算发送/接收概率值(S1406)。接下来,自主移动体10A基于自主移动体10A的参数和自主移动体10B的识别信息计算突变概率值(S1407)。接下来,自主移动体10B的运动控制单元107使驱动单元109和输出单元110执行指示将用户A的特征量传输到自主移动体10A的运动(S1408)。
接下来,自主移动体10B的数据突变单元106基于突变概率值来突变用户A的特征量(S1409)。接下来,自主移动体10A的通信单元108向自主移动体10B发送指示允许发送用户A的特征量的信息(S1410)。接下来,自主移动体10B的通信单元108向自主移动体10A发送用户A的特征量(S1411)。
接下来,自主移动体10A的运动控制单元107执行对对应于在步骤S1411中接收的用户A的特征量的用户A的搜索(S1412),并且自主移动体10A和自主移动体10B结束运动。
自主移动体10对用户特征量的发送/接收由如上所述的动作来表示,由此用户能够理解自主移动体10已经设置了来自另一自主移动体10的与新用户相关的信息。
在上面,已经描述了内部数据是与识别处理相关的信息的情况下的示例。然而,内部数据可以是用于执行自主移动体10的运动的信息。图23是用于说明根据本实施例的用于执行自主移动体10的运动的信息的发送/接收以及自主移动体10的发送/接收的表示的示例的示图。
图23示出了自主移动体10A至10C。在此处,每个自主移动体10可以向/从另一自主移动体10发送/接收用于执行运动的信息。在此处,用于执行运动的信息是指例如自主移动体10执行各种运动所需的信息。
在图23的上图的示例中,自主移动体10C正在执行预定运动。此时,自主移动体10A和10B识别执行预定运动的自主移动体10C。在此处,自主移动体10C向自主移动体10A和10B发送执行预定运动所需的信息。
在图23的下图的示例中,基于从自主移动体10C接收的信息,自主移动体10A和10B执行与其对应的运动,从而表示与接收的信息对应的运动的内容。
注意,当发送/接收内部数据时,数据发送/接收单元105计算发送/接收概率值,并且数据突变单元106计算突变概率值。此时使用的自主移动体10的参数可以包括自主移动体10的特征和影响值。例如,可以基于自主移动体10的特征来计算突变概率值,并且可以基于自主移动体10的影响值来计算发送/接收概率值。
例如,自主移动体10的数据发送/接收单元105可以将自主移动体10自身的影响值与另一自主移动体10的影响值进行比较,并且可以确定是否发送/接收内部数据。此外,例如,自主移动体10的数据突变单元106可以基于自主移动体10本身的特征来突变内部数据。
将描述图23的示例。基于自主移动体10C的影响值高于自主移动体10A和10B的影响值这一事实,自主移动体10C的数据发送/接收单元105确定发送用于执行运动的信息。
此外,基于自主移动体10B的特征是“不耐烦”这一事实,自主移动体10B的数据突变单元106可以突变从自主移动体10C接收的用于执行操作的信息。在图23的下图的示例中,自主移动体10B正在执行部分不同于自主移动体10C的运动。
如上所述,当发送/接收用于执行自主移动体10的运动的信息时,使用自主移动体10的特征和影响值,从而使得能够更自然地表示每个自主移动体10的个性。
随后,将描述用于在自主移动体10的运动中执行间接控制的信息突变的示例。图24至图26是用于说明根据本实施例的用于执行自主移动体10的运动的信息的突变的示例的示图。
图24示出了自主移动体10的每个关节处的运动中是否存在突变。如图24所示,数据突变单元106可以确定是否突变每个关节点处的运动。
图25示出了在自主移动体10的各个关节点处以及在时间序列T1至TN中姿势信息J21至J2N中是否存在突变。数据突变单元106可以在特定时间突变运动。在图25的示例中,数据突变单元106在时间T2和T3突变自主移动体10的姿势信息J22和J23。
图26示出了从另一自主移动体10接收的姿势信息J31和由自主移动体10自身存储的姿势信息J32。数据突变单元106可以使用姿势信息J32来突变姿势信息J31。
在图26的示例中,数据突变单元106通过姿势信息J32来突变姿势信息J31。在突变后的姿势信息J33中,预定关节点的姿势基于姿势信息J31,另一关节点的姿势基于姿势信息J32。
姿势信息如上所述突变,由此自主移动体10的各种运动可以传递给另一自主移动体10。根据这样的功能,用户能够享受每个自主移动体10的不同运动。
随后,将给出用于由自主移动体10执行自主移动体10的运动的信息的发送/接收以及与由自主移动体10执行发送/接收相关的表示的流程的示例的描述。图27是用于说明由自主移动体10发送/接收用于执行根据本实施例的自主移动体10的运动的信息以及与由自主移动体10执行发送/接收相关的表示的流程的示例的示图。
参考图27,首先,自主移动体10A的识别单元102识别自主移动体10B(S1501)。此外,自主移动体10B的识别单元102识别自主移动体10A和C(S1502)。此外,自主移动体10C的识别单元102识别自主移动体10B(S1503)。接下来,自主移动体10A的通信单元108向自主移动体10B发送自主移动体10A的识别信息(S1504)。此外,自主移动体10C的通信单元108也向自主移动体10B发送自主移动体10C的识别信息(S1505)。此外,自主移动体10B的通信单元108向自主移动体10A发送自主移动体10B的识别信息(S1506)。同样,自主移动体10B的通信单元108将自主移动体10B的识别信息发送到自主移动体10C(S1507)。
接下来,自主移动体10A的数据发送/接收单元105基于自主移动体10A的参数和自主移动体10B的识别信息来计算发送/接收概率值(S1508)。此外,自主移动体10B的数据发送/接收单元105也基于自主移动体10B的参数和自主移动体10A和10C的识别信息来计算发送/接收概率值(S1509)。此外,自主移动体10C的数据发送/接收单元105也基于自主移动体10C的参数和自主移动体10B的识别信息来计算发送/接收概率值(S1510)。
接下来,自主移动体10B向自主移动体10A发送用于执行运动的信息(S1511)。类似地,自主移动体10B将用于执行运动的信息发送到自主移动体10C(S1512)。接下来,自主移动体10B的运动控制单元107使驱动单元109和输出单元110执行指示向自主移动体10A和10C发送用于执行运动的信息的操作(S1513)。接下来,自主移动体10A的通信单元108向自主移动体10B发送指示允许发送用于执行运动的信息的信息(S1514)。接下来,自主移动体10C的通信单元108向自主移动体10B发送指示允许发送用于执行运动的信息的信息(S1515)。
接下来,自主移动体10B的通信单元108向自主移动体10A发送在步骤S1509中确定的用于执行运动的信息(S1516)。同样,自主移动体10B的通信单元108向自主移动体10C发送信息(S1517)。
接下来,自主移动体10B的数据突变单元106执行对应于在步骤S1516和S1517中发送的信息的操作(S1518)。接下来,自主移动体10A基于在步骤S1516中接收的用于执行运动的信息来计算突变概率值(S1519)。同样,自主移动体10C的数据突变单元106也基于在步骤S1517中接收的用于执行运动的信息来计算突变概率值(S1520)。
接下来,基于在步骤S1520中计算的突变概率值,自主移动体10C的数据突变单元106对在步骤S1519中接收的信息进行突变(S1521)。接下来,自主移动体10C的运动控制单元107基于在步骤S1523中突变的信息来执行运动(S1522)。此外,自主移动体10A的运动控制单元107基于在步骤S1518中接收的信息来执行运动(S1523),并且自主移动体10A和自主移动体10B结束运动。
如上所述,用于由自主移动体10执行运动的信息的发送/接收由动作来表示,由此用户能够理解自主移动体10已经设置有来自另一自主移动体10的运动。
顺便提及,尽管自主移动体10已经被描述为表示内部数据的发送/接收的执行的设备,但是表示内部数据的发送/接收的执行的设备不限于自主移动体10。例如,头戴式显示器(HMD)可以向用户表示向/从另一头戴式显示器发送/接收内部数据。
图28是用于说明头戴式显示器表示内部数据的发送/接收的执行的示图。图28示出了佩戴头戴式显示器H1的用户UH1和佩戴头戴式显示器H2的用户UH2。注意,此处提到的内部数据是指例如地图信息。地图信息可以包括由头戴式显示器H2获取的信息,例如,道路上的交通拥堵信息。
在图28中,头戴式显示器H1和头戴式显示器H2能够发送/接收内部数据。在图28的示例中,头戴式显示器H1从头戴式显示器H2接收地图信息HM,并将接收到的地图信息HM显示给用户UH1。
此外,头戴式显示器还可以通过发送/接收例如与识别相关的信息(例如,识别目标的类别)来改变可识别目标。头戴式显示器向/从另一头戴式显示器发送/接收信息,从而使得可以动态更新信息。
<2.总结>
如上所述,根据本公开的实施例的自主移动体10能够在发送/接收内部数据时通过动作来表示内部数据的发送/接收的执行。根据这样的配置,用户将能够识别自主移动体10的识别和运动的变化,并且能够更加享受自主移动体10的运动变化。
尽管上面已经参考附图详细描述了本公开的优选实施例,但是本公开的技术范围不限于这些示例。显然,在本公开的技术领域技术人员可以在权利要求中描述的技术思想的范围内提出各种改变或修改,并且自然理解这些也属于本公开的技术范围。
此外,本说明书中描述的效果仅仅是说明性的或示例性的,而不是限制性的。即,除了上述效果之外,或者代替上述效果,根据本公开的技术可以施加从本说明书的描述中对本领域技术人员显而易见的其他效果。
此外,还可以创建用于使内置在计算机中的诸如CPU、ROM和RAM等硬件发挥与自主移动体10的配置等同的功能的程序,并且还可以提供记录该程序的计算机可读记录介质。
此外,在本说明书中与自主移动体10的处理相关的每个步骤不一定必须以流程图中描述的顺序按时间顺序处理。例如,与自主移动体10的处理相关的每个步骤可以以不同于流程图中描述的顺序来处理,或者可以并行处理。
注意,如下配置也属于本公开的技术范围。
(1)一种信息处理设备,包括:
运动控制单元,控制自主移动体的运动,
其中,当发送/接收与自主移动体相关的内部数据时,运动控制单元使自主移动体通过动作来表示内部数据的发送/接收的执行。
(2)根据上述(1)所述的信息处理设备,
其中,根据发送/接收概率值和预定阈值之间的大小关系来确定是否要执行内部数据的发送/接收,并且
基于与自主移动体相关的参数来计算发送/接收概率值。
(3)根据上述(2)所述的信息处理设备,
其中,与自主移动体相关的参数包括自主移动体的影响值。
(4)根据上述(2)或(3)所述的信息处理设备,还包括
数据发送/接收单元,其根据发送/接收概率值和预定阈值之间的大小关系来确定是否执行内部数据的发送/接收,并且在已经确定发送/接收内部数据的情况下发送/接收内部数据。
(5)根据上述(1)至(4)中任一项所述的信息处理设备,
其中,所述内部数据是与自主移动体的识别处理相关的信息,并且
运动控制单元使自主移动体通过动作来表示内部数据的发送/接收的执行。
(6)根据上述(5)所述的信息处理设备,
其中,内部数据是识别目标的类别,并且
当发送/接收类别时,运动控制单元使自主移动体通过动作来表示类别的发送/接收。
(7)根据上述(6)所述的信息处理设备,
其中,内部数据还包括用于执行自主移动体的运动的信息,运动对应于识别目标,并且
当发送/接收类别和用于执行自主移动体的对应于识别目标的运动的信息时,所述运动控制单元使自主移动体执行对应于类别的运动。
(8)根据上述(6)所述的信息处理设备,
其中,内部数据是与卷积神经网络相关的过滤信息,并且
当发送/接收过滤信息时,运动控制单元使自主移动体通过动作来表示过滤信息的发送/接收的执行。
(9)根据上述(5)所述的信息处理设备,
其中,内部数据是环境地图,并且
当发送/接收环境地图时,运动控制单元使自主移动体执行基于环境地图的搜索。
(10)根据上述(9)所述的信息处理设备,
其中,内部数据是对应于环境地图的关注度地图,并且
当发送/接收环境地图和关注度地图时,运动控制单元使自主移动体执行基于环境地图和关注度地图的搜索。
(11)根据上述(5)所述的信息处理设备,
其中,内部数据是用于用户识别的特征量,并且
当发送/接收特征量时,运动控制单元使自主移动体执行对与特征量对应的用户的搜索。
(12)根据上述(1)至(4)中任一项所述的信息处理设备,
其中,内部数据是用于执行自主移动体的运动的信息,并且
当发送/接收用于执行运动的信息时,运动控制单元使自主移动体执行与作为发送/接收的目标的信息相对应的运动。
(13)根据上述(12)所述的信息处理设备,
其中,用于执行自主移动体的运动的信息包括与自主移动体的关节控制相关的信息,并且
当发送/接收与关节控制相关的信息时,运动控制单元使自主移动体执行与作为发送/接收的目标的信息相对应的运动。
(14)根据上述(1)至(13)中任一项所述的信息处理设备,
其中,基于与自主移动体相关的参数来突变内部数据。
(15)根据上述(14)所述的信息处理设备,
其中,基于突变概率值来确定内部数据是否要突变。
(16)根据上述(15)所述的信息处理设备,
其中,基于与自主移动体相关的参数来计算突变概率值。
(17)根据上述(14)至(16)中任一项所述的信息处理设备,还包括
数据突变单元,其在发送/接收内部数据时,基于与自主移动体相关的参数来突变内部数据。
(18)根据上述(1)至(17)中任一项所述的信息处理设备,
其中,向/从另一自主移动体执行内部数据的发送/接收。
(19)一种信息处理方法,包括:
使处理器控制自主移动体的运动;并且
使处理器当发送/接收与自主移动体相关的内部数据时,使自主移动体通过动作来表示内部数据的发送/接收的执行。
(20)一种用于使计算机用作信息处理设备的程序,信息处理设备包括:
运动控制单元,控制自主移动体的运动,
其中,当发送/接收与自主移动体相关的内部数据时,运动控制单元使自主移动体通过动作来表示内部数据的发送/接收的执行。
附图标记列表
10自主移动体
101输入单元
102识别单元
103学习单元
104存储单元
105数据发送/接收单元
106数据突变单元
107运动控制单元
108通信单元
109驱动单元
110输出单元
20网络。
- 信息处理服务器、信息处理方法、信息处理程序、记录了信息处理程序的记录介质、便携终端、便携式计算机的信息处理方法、便携终端用程序、以及记录了便携终端用程序的记录介质
- 信息处理系统、信息处理方法、信息处理设备、信息处理设备控制方法、信息处理终端、信息处理终端控制方法、信息存储介质以及程序