一种牵引机
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及一种运输装置,尤其涉及一种牵引机。
背景技术
在工业生产中经常需要使用到牵引机,牵引机具有可来回反复运动的机械手,机械手可夹取工件并带动工件运动,传统牵引机内的机械手通常是直接固定连接在可移动的滑板上,机械手在直线驱动件的带动下可来回直线运动,在牵引工作时,机械手先运动至行程始端,抓取工件,然后将工件牵引至行程末端,如需要继续将工件牵引,则需要机械手先松开工件,然后机械手移动回行程始端,再抓取工件后继续牵引,如此需要等待机械手移动复位,牵引效率较低,尤其会影响到对于具有生产节拍需求的工件生产质量。
发明内容
本发明目的在于提供一种牵引机,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
本发明解决其技术问题的解决方案是:
一种牵引机,包括立架,所述立架上沿上下方向设置有两个平移机构,所述平移机构包括直线驱动组件与基板,所述直线驱动组件连接于所述立架与所述基板之间,所述直线驱动组件可带动所述基板沿水平直线方向运动,位于上方的所述平移机构内的所述基板连接有第一驱动电机,所述第一驱动电机驱动连接有第一摆臂,所述第一摆臂的旋转轴线沿竖直方向延伸,所述第一摆臂的底侧设置有第一避让缺口,所述第一避让缺口位于所述第一摆臂的旋转轴线上,所述第一摆臂上设置有第一抓手,所述第一抓手内具有第一夹紧空间,位于下方的所述平移机构内的所述基板连接有第二驱动电机,所述第二驱动电机驱动连接有第二摆臂,所述第二摆臂的旋转轴线沿竖直方向延伸,所述第二摆臂的顶侧设置有第二避让缺口,所述第二避让缺口位于所述第二摆臂的旋转轴线上,所述第二摆臂上设置有第二抓手,所述第二抓手内具有第二夹紧空间,所述第一夹紧空间与所述第二夹紧空间位于同一水平线上,其中:所述第一摆臂转动至垂直于所述基板、所述第二摆臂转动至平行于所述基板时,所述第二摆臂可穿过所述第一避让缺口;所述第一摆臂转动至平行于所述基板、所述第二摆臂转动至垂直于所述基板时,所述第一摆臂可穿过所述第二避让缺口。
该技术方案至少具有如下的有益效果:立架上具有两个平移机构,每个平移机构内均可连接抓手,在牵引过程中,利用两个抓手可实现对工件不间断的牵引,具体的,可先使用两个平移机构内的任意一个抓手对工件牵引,如先利用位于上方的平移机构内的第一抓手抓取工件,此时第一驱动电机带动第一摆臂转动至垂直于基板,第二驱动电机则带动第二转臂转动至平行于基板,位于上方的直线驱动组件带动位于上方的基板沿直线方向运动,如由立架的首端移动至立架的末端,当上下两个平移机构相互交错时,由于第二摆臂可穿过第一避让缺口,使得两个平移机构不会互相干涉,而位于下方的平移机构此时可移动至立架的首端,并由第二驱动电机带动第二摆臂转动至垂直于基板,当位于上方的平移机构移动至立架的末端时,第一抓手松开工件,由于第一夹紧空间与第二夹紧空间位于同一条水平线上,第二抓手可直接抓取工件,由第二抓手继续牵引,而第一驱动电机则带动第一摆臂转动至平行于基板,使得上下两个平移机构相互交错时,第一摆臂可穿过第二避让缺口,两个平移机构不会互相干涉,如此重复动作,可实现对工件的不间断牵引,因此,本发明结构巧妙,利用自身形成的避让结构使得两个平移机构在相互交错时不产生干涉,实现对工件的不间断牵引,极大地提高了牵引效率,并提高工件的生产质量。
作为上述技术方案的进一步改进,所述第一摆臂包括第一牵引杆与第一安装壳体,所述第一驱动电机驱动连接于所述第一牵引杆,所述第一安装壳体连接于所述第一牵引杆的底侧,所述第一抓手设置于所述第一安装壳体上,所述第一安装壳体正对所述第一牵引杆的旋转轴线的一侧面为第一避让面,所述第一牵引杆的底侧与所述第一避让面之间形成所述第一避让缺口。第一驱动电机带动第一牵引杆转动,第一牵引杆底侧的第一安装壳体则用于安装第一抓手,第一抓手的驱动结构可装入至第一安装壳体内,第一牵引杆的底侧与第一安装壳体的第一避让面之间形成第一避让缺口,当第一牵引杆转动至与基板垂直时,第一避让缺口则可正对于第二摆臂,以供第二摆臂穿过。
作为上述技术方案的进一步改进,所述第一抓手包括第三驱动电机、第一上传动轴、第一上钳爪、第一下传动轴与第一下钳爪,所述第三驱动电机位于所述第一安装壳体内,所述第三驱动电机驱动连接于所述第一上传动轴与所述第一下传动轴,所述第三驱动电机可带动所述第一上传动轴与所述第一下传动轴自转,所述第一上传动轴伸出所述第一安装壳体并连接所述第一上钳爪,所述第一下传动轴伸出所述第一安装壳体并连接所述第一下钳爪,所述第一上钳爪与所述第一下钳爪之间形成所述第一夹紧空间。第三驱动电机安装于第一安装壳体内,由第一安装壳体对驱动结构进行保护,第三驱动电机可通过第一上传动轴与第一下传动轴分别带动第一上钳爪与第一下钳爪转动,使得第一上钳爪与第一下钳爪相互靠近或分离,如此可实现对工件的抓取或松开。
作为上述技术方案的进一步改进,所述第二摆臂包括第二牵引杆与第二安装壳体,所述第二驱动电机驱动连接于所述第二牵引杆,所述第二安装壳体连接于所述第二牵引杆的顶侧,所述第二抓手设置于所述第二安装壳体上,所述第二安装壳体正对所述第二牵引杆的旋转轴线的一侧面为第二避让面,所述第二牵引杆的顶侧与所述第二避让面之间形成所述第二避让缺口。第二驱动电机带动第二牵引杆转动,第二牵引杆顶侧的第二安装壳体则用于安装第二抓手,第二抓手的驱动结构可装入至第二安装壳体内,第二牵引杆的顶侧与第二安装壳体的第二避让面之间形成第二避让缺口,当第二牵引杆转动至与基板垂直时,第二避让缺口则可正对于第一摆臂,以供第一摆臂穿过。
作为上述技术方案的进一步改进,所述第二抓手包括第四驱动电机、第二上传动轴、第二上钳爪、第二下传动轴与第二下钳爪,所述第四驱动电机位于所述第二安装壳体内,所述第四驱动电机驱动连接于所述第二上传动轴与所述第二下传动轴,所述第四驱动电机可带动所述第二上传动轴与所述第二下传动轴自转,所述第二上传动轴伸出所述第二安装壳体并连接所述第二上钳爪,所述第二下传动轴伸出所述第二安装壳体并连接所述第二下钳爪,所述第二上钳爪与所述第二下钳爪之间形成所述第二夹紧空间。第四驱动电机安装于第二安装壳体内,由第二安装壳体对驱动结构进行保护,第四驱动电机可通过第二上传动轴与第二下传动轴分别带动第二上钳爪与第二下钳爪转动,使得第二上钳爪与第二下钳爪相互靠近或分离,如此可实现对工件的抓取或松开。
作为上述技术方案的进一步改进,所述直线驱动组件包括第五驱动电机、主动齿轮、齿条与导轨,所述齿条与所述导轨沿水平方向连接于所述立架上,所述第五驱动电机连接于所述基板上,所述第五驱动电机驱动连接于所述主动齿轮,所述主动齿轮与所述齿条相互啮合,所述基板滑动连接于所述导轨上,所述基板可沿所述导轨的长度延伸方向滑动。由于主动齿轮与齿条相互啮合,并且基板滑动连接于导轨上,第五驱动电机带动主动齿轮转动时可实现基板在导轨上运动,通过控制主动齿轮的正转或反转,可实现基板在导轨上的往复运动。
作为上述技术方案的进一步改进,所述齿条为斜齿条,所述基板上连接有承重支架,所述承重支架位于所述齿条的下方,所述承重支架上转动连接有承重轮,所述承重轮的外周壁相抵于所述导轨正对所述基板的一侧面。斜齿条可提高基板运动的稳定性,噪音更少,而利用承重轮抵在导轨的侧面上,可抵消主动齿轮的轴向受力,提高滑动结构稳定性。
作为上述技术方案的进一步改进,所述基板正对所述齿条的一侧面设置有上滚轮座与下滚轮座,所述上滚轮座与所述下滚轮座沿上下方向间隔设置,所述上滚轮座沿水平方向设置有多个,每个所述上滚轮座内均转动连接有第一滚轮,所述第一滚轮的底侧设置有一个所述导轨,所述下滚轮座沿水平方向设置有多个,每个所述下滚轮座内均转动连接有第二滚轮,所述第二滚轮的顶侧设置有一个所述导轨,所述第一滚轮的旋转轴线与所述第二滚轮的旋转轴线均垂直于所述基板。两个导轨形成一个平面,而基板的上滚轮与下滚轮分别抵在该平面的顶侧与底侧,即形成了一个夹紧的结构,如此基板在连接上受力更加稳定,并且运动更加平稳。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本发明的一部分实施例,而不是全部实施例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
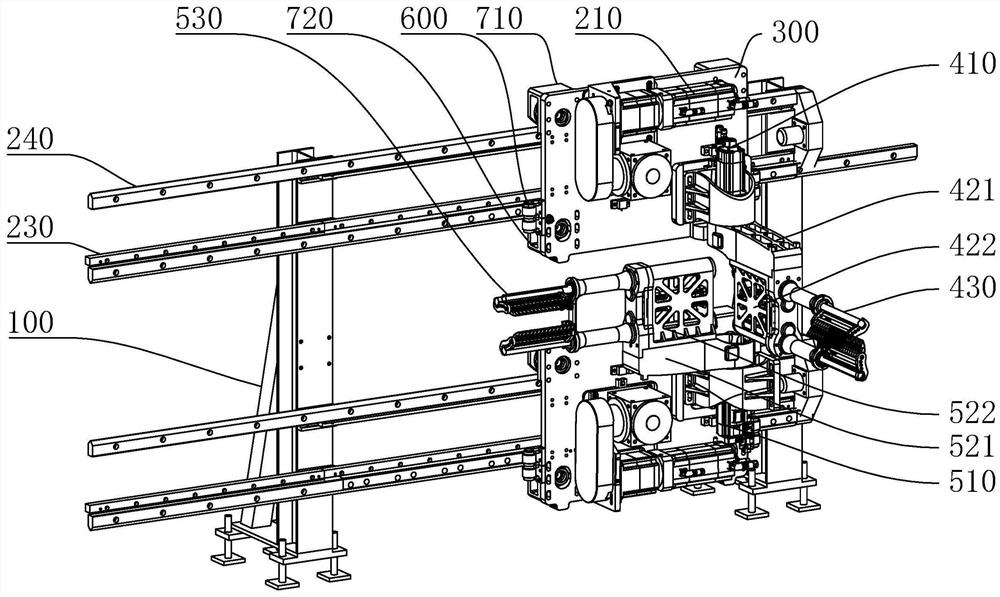
图1是本发明的整体立体图;
图2是本发明的整体后视图;
图3是本发明的第一摆臂与第二摆臂立体图。
附图中:100-立架、210-第五驱动电机、220-主动齿轮、230-齿条、240-导轨、300-基板、410-第一驱动电机、420-第一摆臂、421-第一牵引杆、422-第一安装壳体、430-第一抓手、440-第一避让缺口、510-第二驱动电机、520-第二摆臂、521-第二牵引杆、522-第二安装壳体、530-第二抓手、540-第二避让缺口、600-承重轮、710-上滚轮座、720-下滚轮座。
具体实施方式
以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,文中所提到的所有连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少连接辅件,来组成更优的连接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
参照图1与图3,一种牵引机,包括立架100,所述立架100上沿上下方向设置有两个平移机构,所述平移机构包括直线驱动组件与基板300,所述直线驱动组件连接于所述立架100与所述基板300之间,所述直线驱动组件可带动所述基板300沿水平直线方向运动,位于上方的所述平移机构内的所述基板300连接有第一驱动电机410,所述第一驱动电机410驱动连接有第一摆臂420,所述第一摆臂420的旋转轴线沿竖直方向延伸,所述第一摆臂420的底侧设置有第一避让缺口440,所述第一避让缺口440位于所述第一摆臂420的旋转轴线上,所述第一摆臂420上设置有第一抓手430,所述第一抓手430内具有第一夹紧空间,位于下方的所述平移机构内的所述基板300连接有第二驱动电机510,所述第二驱动电机510驱动连接有第二摆臂520,所述第二摆臂520的旋转轴线沿竖直方向延伸,所述第二摆臂520的顶侧设置有第二避让缺口540,所述第二避让缺口540位于所述第二摆臂520的旋转轴线上,所述第二摆臂520上设置有第二抓手530,所述第二抓手530内具有第二夹紧空间,所述第一夹紧空间与所述第二夹紧空间位于同一水平线上,其中:所述第一摆臂420转动至垂直于所述基板300、所述第二摆臂520转动至平行于所述基板300时,所述第二摆臂520可穿过所述第一避让缺口440;所述第一摆臂420转动至平行于所述基板300、所述第二摆臂520转动至垂直于所述基板300时,所述第一摆臂420可穿过所述第二避让缺口540。
由上述可知,立架100上具有两个平移机构,每个平移机构内均可连接抓手,在牵引过程中,利用两个抓手可实现对工件不间断的牵引,具体的,可先使用两个平移机构内的任意一个抓手对工件牵引,如先利用位于上方的平移机构内的第一抓手430抓取工件,此时第一驱动电机410带动第一摆臂420转动至垂直于基板300,第二驱动电机510则带动第二转臂转动至平行于基板300,位于上方的直线驱动组件带动位于上方的基板300沿直线方向运动,如由立架100的首端移动至立架100的末端,当上下两个平移机构相互交错时,由于第二摆臂520可穿过第一避让缺口440,使得两个平移机构不会互相干涉,而位于下方的平移机构此时可移动至立架100的首端,并由第二驱动电机510带动第二摆臂520转动至垂直于基板300,当位于上方的平移机构移动至立架100的末端时,第一抓手430松开工件,由于第一夹紧空间与第二夹紧空间位于同一条水平线上,第二抓手530可直接抓取工件,由第二抓手530继续牵引,而第一驱动电机410则带动第一摆臂420转动至平行于基板300,使得上下两个平移机构相互交错时,第一摆臂420可穿过第二避让缺口540,两个平移机构不会互相干涉,如此重复动作,可实现对工件的不间断牵引,因此,本发明结构巧妙,利用自身形成的避让结构使得两个平移机构在相互交错时不产生干涉,实现对工件的不间断牵引,极大地提高了牵引效率,并提高工件的生产质量。
第一摆臂420上的第一避让缺口440,主要可实现在转出时可以展开并正对第二摆臂520,在本实施例中,所述第一摆臂420包括第一牵引杆421与第一安装壳体422,所述第一驱动电机410驱动连接于所述第一牵引杆421,所述第一安装壳体422连接于所述第一牵引杆421的底侧,所述第一抓手430设置于所述第一安装壳体422上,所述第一安装壳体422正对所述第一牵引杆421的旋转轴线的一侧面为第一避让面,所述第一牵引杆421的底侧与所述第一避让面之间形成所述第一避让缺口440。第一驱动电机410带动第一牵引杆421转动,第一牵引杆421底侧的第一安装壳体422则用于安装第一抓手430,第一抓手430的驱动结构可装入至第一安装壳体422内,第一牵引杆421的底侧与第一安装壳体422的第一避让面之间形成第一避让缺口440,当第一牵引杆421转动至与基板300垂直时,第一避让缺口440则可正对于第二摆臂520,以供第二摆臂520穿过。
作为第一抓手430的进一步实施例,所述第一抓手430包括第三驱动电机、第一上传动轴、第一上钳爪、第一下传动轴与第一下钳爪,所述第三驱动电机位于所述第一安装壳体422内,所述第三驱动电机驱动连接于所述第一上传动轴与所述第一下传动轴,所述第三驱动电机可带动所述第一上传动轴与所述第一下传动轴自转,所述第一上传动轴伸出所述第一安装壳体422并连接所述第一上钳爪,所述第一下传动轴伸出所述第一安装壳体422并连接所述第一下钳爪,所述第一上钳爪与所述第一下钳爪之间形成所述第一夹紧空间。第三驱动电机安装于第一安装壳体422内,由第一安装壳体422对驱动结构进行保护,第三驱动电机可通过第一上传动轴与第一下传动轴分别带动第一上钳爪与第一下钳爪转动,使得第一上钳爪与第一下钳爪相互靠近或分离,如此可实现对工件的抓取或松开。
同样的,第二摆臂520上的第二避让缺口540,主要可实现在转出时可正对第一避让缺口440,在本实施例中,所述第二摆臂520包括第二牵引杆521与第二安装壳体522,所述第二驱动电机510驱动连接于所述第二牵引杆521,所述第二安装壳体522连接于所述第二牵引杆521的顶侧,所述第二抓手530设置于所述第二安装壳体522上,所述第二安装壳体522正对所述第二牵引杆521的旋转轴线的一侧面为第二避让面,所述第二牵引杆521的顶侧与所述第二避让面之间形成所述第二避让缺口540。第二驱动电机510带动第二牵引杆521转动,第二牵引杆521顶侧的第二安装壳体522则用于安装第二抓手530,第二抓手530的驱动结构可装入至第二安装壳体522内,第二牵引杆521的顶侧与第二安装壳体522的第二避让面之间形成第二避让缺口540,当第二牵引杆521转动至与基板300垂直时,第二避让缺口540则可正对于第一摆臂420,以供第一摆臂420穿过。
作为第二抓手530的进一步实施例,所述第二抓手530包括第四驱动电机、第二上传动轴、第二上钳爪、第二下传动轴与第二下钳爪,所述第四驱动电机位于所述第二安装壳体522内,所述第四驱动电机驱动连接于所述第二上传动轴与所述第二下传动轴,所述第四驱动电机可带动所述第二上传动轴与所述第二下传动轴自转,所述第二上传动轴伸出所述第二安装壳体522并连接所述第二上钳爪,所述第二下传动轴伸出所述第二安装壳体522并连接所述第二下钳爪,所述第二上钳爪与所述第二下钳爪之间形成所述第二夹紧空间。第四驱动电机安装于第二安装壳体522内,由第二安装壳体522对驱动结构进行保护,第四驱动电机可通过第二上传动轴与第二下传动轴分别带动第二上钳爪与第二下钳爪转动,使得第二上钳爪与第二下钳爪相互靠近或分离,如此可实现对工件的抓取或松开。
直线驱动组件主要用于带动基板300在立架100上沿直线方向运动,如图2所示,在本实施例中,所述直线驱动组件包括第五驱动电机210、主动齿轮220、齿条230与导轨240,所述齿条230与所述导轨240沿水平方向连接于所述立架100上,所述第五驱动电机210连接于所述基板300上,所述第五驱动电机210驱动连接于所述主动齿轮220,所述主动齿轮220与所述齿条230相互啮合,所述基板300滑动连接于所述导轨240上,所述基板300可沿所述导轨240的长度延伸方向滑动。由于主动齿轮220与齿条230相互啮合,并且基板300滑动连接于导轨240上,第五驱动电机210带动主动齿轮220转动时可实现基板300在导轨240上运动,通过控制主动齿轮220的正转或反转,可实现基板300在导轨240上的往复运动。
为了提高主动齿轮220与齿条230之间的连接稳定性,在本实施例中,所述齿条230为斜齿条230,所述基板300上连接有承重支架,所述承重支架位于所述齿条230的下方,所述承重支架上转动连接有承重轮600,所述承重轮600的外周壁相抵于所述导轨240正对所述基板300的一侧面。斜齿条230可提高基板300运动的稳定性,噪音更少,而利用承重轮600抵在导轨240的侧面上,可抵消主动齿轮220的轴向受力,提高滑动结构稳定性。
在上述实施例中,基板300可通过滑轨与滑槽的配合直接实现与导轨240的滑动配合连接,而为了使得基板300在运动时更加平稳、顺畅,在本实施例中,所述基板300正对所述齿条230的一侧面设置有上滚轮座710与下滚轮座720,所述上滚轮座710与所述下滚轮座720沿上下方向间隔设置,所述上滚轮座710沿水平方向设置有多个,每个所述上滚轮座710内均转动连接有第一滚轮,所述第一滚轮的底侧设置有一个所述导轨240,所述下滚轮座720沿水平方向设置有多个,每个所述下滚轮座720内均转动连接有第二滚轮,所述第二滚轮的顶侧设置有一个所述导轨240,所述第一滚轮的旋转轴线与所述第二滚轮的旋转轴线均垂直于所述基板300。两个导轨240形成一个平面,而基板300的上滚轮与下滚轮分别抵在该平面的顶侧与底侧,即形成了一个夹紧的结构,如此基板300在连接上受力更加稳定,并且运动更加平稳。
以上对本发明的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变型或替换,这些等同的变型或替换均包含在本申请权利要求所限定的范围内。
- 铝型材上牵引机、下牵引机及牵引机构
- 一种牵引机构及具有该牵引机构的牵引式AGV