多级串联可扩展式干粘附轮足爬壁机器人及其运动方法
文献发布时间:2023-06-19 11:30:53
技术领域
本发明属于机器人应用技术领域,具体涉及一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法,主要作为自然环境下的地面、壁面等平面移动平台。
技术背景
机器人是传统机构学与近代电子技术相结合、多学科融合的高科技产物,是一种可以根据人工智能技术、预先编程受控于人类的可自动执行工作的机器装置。机器人技术的飞速发展一定程度上对传统工业产生了冲击,推动了科技的发展,与人类的社会生活也产生了紧密的联系,并成为衡量一个国家科技创新和高端制造业水平的重要标准。
爬壁机器人是移动机器人的一个重要分支,又叫做壁面移动机器人,可在垂直墙壁攀爬并完成工作。根据结构的不同可将爬壁机器人主要分为以下几种:足式爬壁机器人、履带式爬壁机器人、以及轮式爬壁机器人。足式爬壁机器人越障能力较强且环境适应性较好,但其结构相对复杂、速度慢、控制难;履带式爬壁机器人结构简单易操控、负载能力较强,但不易转弯,且能耗高、壁面适应性差;轮式爬壁机器人运动速度快、稳定性好。
国内外较多科研机构都展开了关于轮式爬壁机器人的研究,美国凯斯西储大学(Case Western Reserve University)研制了一款轮式爬壁机器人Mini-Whegs。该机器人是一款轮式驱动机器人,每个轮子有四个支架用于附着有MSAMS(mushroom-shapedadhesive microstructure)粘附材料,运用轮式结构的转动实现吸附和脱附运动,实现了从水平面到竖直面、从竖直面到负表面的内角过渡,且能够在倒置的光滑面稳定粘附运动。(K. A. Daltorio, A. D. Horchler, S. Gorb, R. E. Ritzmann and R. D. Quinn, "Asmall wall-walking robot with compliant, adhesive feet," 2005 IEEE/RSJInternational Conference on Intelligent Robots and Systems, Edmonton, Alta.,2005, pp. 3648-3653)。但由于该机器人爬壁瞬时粘附材料与壁面接触面积较小,因此需大幅减轻自身重量,所能承受负载较小。卡耐基梅隆大学(Carnegie Mellon University,CMU)研制了一款名为Waalbot的微小型机器人。该机器人为轮式移动机器人,由两个电机驱动分别驱动一组三脚轮,每个轮子上各有三个圆盘状脚垫,脚垫上带有干粘附材料,可以实现任意角度的快速转弯功能和壁面过渡。(Murphy M P, Sitti M. Waalbot: An agilesmall-scale wall-climbing robot utilizing dry elastomer adhesives[J]. IEEE/ASME transactions on Mechatronics, 2007, 12(3): 330-338.)。但由于该机器人圆盘状的脚垫结构,导致机器人脱附运动较为困难。迪士尼研究中心和苏黎世联邦理工学院联合开发了一款轮式机器人VertiGo,具有轻量级碳纤维框架,两个独立的倾斜推进器以及四个3D打印的轮子。地面运动时,后面支柱和地面垂直,提供足够的水平推力,将机器带入各种地形。壁面运动时,前面的推进器推进并且向上倾斜,将机器人的前端向上推进,后面的支柱持续推进后端向前。(Arigoni M, Simpson R, Fuhrer S, et al. Vehiclesconfigured for navigating surface transitions: U.S. Patent 10,464,620[P].2019-11-5.)。但由于采用推进器提供附着力,噪声较大且稳定性较差。目前为止,轮式爬壁机器人稳定粘/脱附、地壁过渡,快速转弯等功能有限,而一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法尚未报道过,也并未展开过研究。
发明内容
本发明的目的是模拟昆虫干粘附与轮式结构运动机制,同时适应地面、倾斜面甚至天花板表面,实现机器人轮足与壁面作用时稳定附着、地壁过渡、转弯等功能,提供一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法。
本发明的目的在于提供一种多级串联可扩展式干粘附轮足爬壁机器人,其特征在于:包括N个轮式爬壁单元,并且前后相邻的轮式爬壁单元之间通过磁性连接弹簧串联;
轮式爬壁单元包括一个底板、安装于底板前部的摄像头云台,分别安装于底板中部左、右两侧的轮式机构,以及分别安装于底板后部左、右两侧的牛眼轮机构;
轮式机构由舵机连接件、舵机、舵机舵盘和轮足组成;其中舵机通过舵机连接件固定在底板的一侧;轮足通过舵机舵盘与舵机固定连接;轮足由外轮和内轮组成;
外轮由外轮轮毂以及均匀布置于外轮轮毂周向的大粘附叶片组成;大粘附叶片由一片折弯的大面积弹性PVC片和一片干粘附材料片组成,折弯的大面积弹性PVC片由连接部分与干粘附材料安装部分组成,两部分呈110-130度夹角;折弯的大面积弹性PVC片的连接部分安装在外轮内,干粘附材料片安装于折弯的大面积弹性PVC片的干粘附材料安装部分,干粘附材料安装部分的根部分布在外轮轮毂圆周上;初始状态时大粘附叶片的干粘附材料片与外轮轮毂直径方向呈50-70度夹角,均匀分布于外轮圆周上;
内轮由内轮轮毂以及均匀布置于内轮轮毂周向的小粘附叶片组成;上述小粘附叶片由一片折弯的小面积弹性PVC片和一片干粘附材料片组成,折弯的小面积弹性PVC片由连接部分与干粘附材料安装部分组成,两部分呈110-130度夹角;折弯的小面积弹性PVC片的连接部分安装在内轮内,干粘附材料片安装于折弯的小面积弹性PVC片的干粘附材料安装部分,干粘附材料安装部分的根部分布在内轮轮毂圆周上;初始状态时小粘附叶片的干粘附材料与内轮轮毂直径方向呈50-70度夹角,均匀分布于内轮圆周上;
外轮轮毂与内轮轮毂固定连接,使固定连接在其上的大粘附叶片与小粘附叶片实现均匀交错分布;外轮轮毂直径和内轮轮毂直径相等;大粘附叶片外缘与小粘附叶片外缘直径相等;
上述牛眼轮机构由牛眼轮基座和其下方的牛眼轮万向球组成;
上述摄像头云台由摄像头、云台支架、云台底座组成;摄像头通过云台支架及云台底座安装于底板上;
上述磁性连接弹簧依次由弹簧与磁铁组成;磁铁分别与对应的轮式爬壁单元的底板通过电磁方式相连。
上述多级串联可扩展式干粘附轮足爬壁机器人的运动方法,其特征在于包括以下过程:
第一种、对于在倾斜、竖直与倒置等平面稳定攀爬的运动情况:舵机带动轮足进行圆周运动,使轮足上安装的大粘附叶片和大粘附叶片周期性的与壁面接触、粘附、脱附,以实现爬壁功能;
其周期性是由于单个轮足上大粘附叶片与小粘附叶片交错分布,在外轮上的大粘附叶片开始脱附时内轮上的小粘附叶片开始粘附,反之亦然;
分析单个大粘附叶片或单个小粘附叶片的粘/脱过程:轮足圆周运动带动安装在轮足上的粘附叶片运动,使之具有一定惯性,当粘附叶片开始接触壁面时,运动惯性将粘附叶片甩向壁面,提供一定预压力,使粘附叶片与壁面初步粘附;随着轮足进一步的圆周运动,轮足前进,由于底盘后部牛眼轮机构的支撑,轮足基体压向粘附叶片,使粘附叶片发生变形,与轮足基地圆周表面贴合,并提供二次压力,使粘附叶片得以更好的粘附;轮足继续圆周运动,下一片粘附叶片开始准备粘附而已粘附的粘附叶片进入脱附阶段,轮足基体对粘附叶片的二次压力逐渐减小,粘附叶片逐步恢复原状,产生弹性力提供一部分脱附力;随着轮足的继续前进,粘附叶片根部受到轮足基体的牵引,使得粘附材料从一侧开始与壁面脱附,完成一次脱附运动;
通过左、右两侧的轮式机构对应轮足的差速改变整体方向,并通过磁性连接弹簧的弯曲,将运动传递给另一轮式爬壁单元,使该爬壁机器人整体呈弯曲状,实现转弯运动,改变机器人运动方向;
第二种、对于地壁过渡的运动情况:①前面的轮式爬壁单元机身沿壁面向上运动,过程中牛眼轮机构与墙面紧密接触,提供支持力;前面的轮式爬壁单元在地面进行粘/脱附运动,持续前进,逐渐从地面向壁面过渡,磁性连接弹簧弯曲,牵引后面的轮式爬壁单元实现过渡;②前面的轮式爬壁单元侧向沿壁面进行过渡运动,过程中该轮式爬壁单元中一侧的轮足先与墙面紧密接触,提供粘附力,随后轮式爬壁单元中另一侧轮足与壁面接触并粘附,牛眼轮机构与壁面紧密接触,提供支持力;前面的轮式爬壁单元持续前进,逐渐从地面向壁面过渡,磁性连接弹簧扭转,牵引后面的轮式爬壁单元实现地壁过渡;
第三种、对于轮式爬壁单元粘附失败而脱落的运动情况:若爬壁机器人在攀爬过程中,上面的轮式爬壁单元粘附失效而脱落,而下面的轮式爬壁单元由于位于后部,受到磁性连接弹簧传递的力,随着其不断前进,使上面的脱落的轮式爬壁单元得以再次接触壁面,实现新的粘附;
第四种、由壁面向水平面270°过渡运动的运动情况:过渡运动临界前,轮式爬壁单元均粘附于壁面,下面的轮式爬壁单元向上推进,压缩磁性连接弹簧,对上面的轮式爬壁单元进行托举,协助其粘附至水平面;上面的轮式爬壁单元成功过渡后,向前推进,拉伸磁性连接弹簧,对未完成过渡运动的轮式爬壁单元进行牵引,帮助其完成过渡。
上述多级串联可扩展式干粘附轮足爬壁机器人的爬壁方法,其特征在于还包括以下过程:
第五种、整体运动与分散作业的运动情况:各轮式爬壁单元之间通过磁性连接弹簧连接成一个整体,使运动过程更加有序高效;
到达目标位置进行分散作业时,各轮式爬壁单元前部电磁连接接口断电,磁性消失,机器人分散成若干轮式爬壁单元;
通过摄像头云台与群体控制,对各个轮式爬壁单元的四周进行监测并协同作业,通过单元所携带末端执行器完成相应任务。
本发明与现有技术相比有如下优点:
1、本发明的结构简单、运动原理清晰、运动实现方便,可使爬壁机器人适应不同壁面,为高效稳定运动提供机构运动保障。
2、本发明中的干粘附材料可使爬壁机器人在不同倾斜度的表面(例如倒置)上较为平稳的运动。
3、本发明中的采用轮足方式可使爬壁机器人在轻松实现地壁过渡,快速转弯等功能。
4、本发明中的轮足内外轮双排结构,使安装在其上的粘附叶片交错分布,干粘附材料瞬时接触面积增大,粘脱附变换平稳,增强了机器人运动的可靠性。
5、本发明中的轮式爬壁单元前后两端预留连接接口,实现机器人的整体运动与分散作业,机器人工作范围与功能多样性得到大幅提升。
6、本发明中的轮式爬壁单元间托举牵引等协同作业,使机器人实现了由壁面向水平面270°过渡运动。
7、本发明的结构巧妙、体积小、重量轻、加工方便、经济可行,可为自然环境下的地面、壁面等平面移动平台提供解决方案。
附图说明
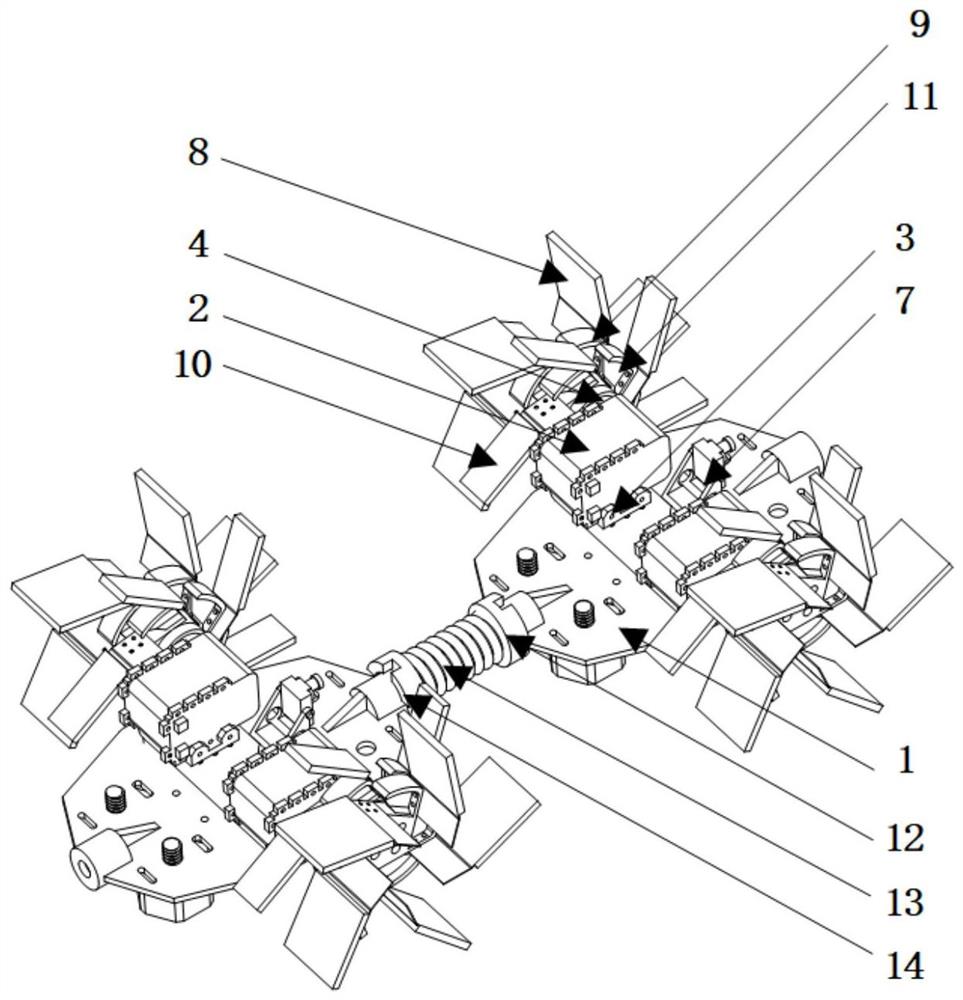
图1是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人(N=2)的立体视图;
图2是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人(N=2)的爆炸图;
图3是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人的单个轮式爬壁单元的爆炸图;
图4是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人的轮足的爆炸图;
图5是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人的磁性连接弹簧的爆炸图;
图6是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法的爬壁过程中转弯运动状态;
图7是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法的地壁过渡的第一种运动情况;
图8是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法的地壁过渡的第二种运动情况;
图9是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法的轮式爬壁单元粘附失败而脱落的运动情况;
图10是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人(N=6)的立体视图;
图11是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人(N=6)第一种分散作业情况的立体视图;
图12是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人(N=6)第二种分散作业情况的立体视图;
图13是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人(N=2)由壁面向水平面270°过渡的运动情况;
图14是本发明所述的一种多级串联可扩展式干粘附轮足爬壁机器人(N=6)由壁面向水平面270°过渡的运动情况;
图1-14中标号名称:A、前轮式爬壁单元;B、磁性连接弹簧;C、后轮式爬壁单元;D、左轮足;E、右轮足;1、底盘;2、舵机;3、舵机连接件;4、舵机舵盘;5、牛眼轮基座;6、牛眼轮万向球;7-1、摄像头;7-2、云台支架;7-3、云台底座;8、大粘附叶片;8-1、干粘附材料片;8-2、折弯的大面积弹性PVC片;9、外轮;10、小粘附叶片;11、内轮;12、第一磁铁;13、弹簧;14、第二磁铁。
具体实施方式
下面结合附图和具体实施例对本发明进一步详细说明:
结合图1-14,本发明的目的在于提供一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法。
如图2所示,本发明的目的在于提供一种多级串联可扩展式干粘附轮足爬壁机器人,其特征在于:包括前爬壁单元A、磁性连接弹簧B、后爬壁单元C;前爬壁单元A与后爬壁单元C通过磁性连接弹簧B进行磁吸附连接,A、C对称线与B轴线重合;磁性连接弹簧B由第一磁铁12、弹簧13与第二磁铁14组成,如图5所示,弹簧13两端分别装有第一磁铁12、第二磁铁14;轮式爬壁单元的底板1前后两端预留连接接口,由电磁铁控制磁力有无,实现单元与单元之间的连接与断开,便于后期对机器人进行扩展,即N组轮式爬壁单元(N=1、2、3...);图2所示机器人中,N=2。
如图3所示,本发明的目的在于提供一种多级串联可扩展式干粘附轮足爬壁机器人的轮式爬壁单元,其特征在于:包括底板1、舵机2、舵机连接件3、舵机舵盘4、牛眼轮基座5、牛眼轮万向球6、摄像头7-1、云台支架7-2、云台底座7-3、左轮足D、右轮足E;其中舵机2通过舵机连接件3与底板1固定连接;舵机2通过舵机舵盘4与左轮足D、右轮足E固定连接;牛眼轮万向球6安装于牛眼轮基座5中,牛眼轮基座5的螺纹轴穿过底板1上通孔,与底板1通过螺栓连接;摄像头7-1安装在云台支架7-2上,然后将装有摄像头的支架安装在云台底座7-3上,云台底座7-3与底板1通过螺栓连接。
如图4所示,本发明的目的在于提供一种基于干粘附材料实现爬壁的轮足,其特征在于:包括大粘附叶片8、外轮9、小粘附叶片10、内轮11。取一片大粘附叶片8详细说明粘附叶片的组成与安装方式:大粘附叶片8由一片干粘附材料片8-1与一片折弯的大面积弹性PVC片8-2组成;折弯的大面积弹性PVC片8-2由连接部分与干粘附材料安装部分组成,两部分呈110-130度夹角;折弯的大面积弹性PVC片8-2的连接部分安装在外轮9内,干粘附材料片8-1安装于折弯的大面积弹性PVC片8-2的干粘附材料安装部分,干粘附材料安装部分的根部分布在外轮9轮毂圆周上;初始状态时大粘附叶片8的干粘附材料片8-1与外轮9轮毂直径方向呈50-70度夹角,均匀分布于外轮9圆周上;
上述外轮9轮毂与内轮11轮毂固定连接,使固定连接在其上的大粘附叶片8与小粘附叶片10实现均匀交错分布;上述外轮9轮毂直径和内轮11轮毂直径相等;上述大粘附叶片8外缘与小粘附叶片10外缘直径相等。
本发明的目的在于提供一种多级串联可扩展式干粘附轮足爬壁机器人及其运动方法,其特征在于包括以下过程:
第一种、对于在倾斜、竖直与倒置等平面稳定攀爬的运动情况:舵机2带动轮足D、轮足E进行圆周运动,使轮足上安装的大粘附叶片8和小粘附叶片10周期性的与壁面接触、粘附、脱附,以实现爬壁功能;
其周期性是由于单个轮足上大粘附叶片8与小粘附叶片10交错分布,在外轮9上的大粘附叶片8开始脱附时内轮11上的小粘附叶片10开始粘附,反之亦然;
分析单个大粘附叶片8或单个小粘附叶片10的粘/脱过程:轮足圆周运动带动安装在轮足上的粘附叶片运动,使之具有一定惯性,当粘附叶片开始接触壁面时,运动惯性将粘附叶片甩向壁面,提供一定预压力,使粘附叶片与壁面初步粘附;随着轮足进一步的圆周运动,轮足前进,由于底盘1后部牛眼轮机构的支撑,轮足基体压向粘附叶片,使粘附叶片发生变形,与轮足基体圆周表面贴合,并提供二次压力,使粘附叶片得以更好的粘附;轮足继续圆周运动,下一片粘附叶片开始准备粘附而已粘附的粘附叶片进入脱附阶段,轮足基体对粘附叶片的二次压力逐渐减小,粘附叶片逐步恢复原状,产生弹性力提供一部分脱附力;随着轮足的继续前进,粘附叶片根部受到轮足基体的牵引,使得粘附材料从一侧开始与壁面脱附,完成一次脱附运动;
如图6所示,前轮式爬壁单元A可通过左轮足D与右轮足E的差速改变整体方向,并通过磁性连接弹簧B的弯曲,将运动传递给后轮式爬壁单元C,使该爬壁机器人整体呈弯曲状,实现转弯运动,改变机器人运动方向。
第二种、如图7、图8所示,对于地壁过渡的运动情况:①前面的轮式爬壁单元A机身沿壁面向上运动,过程中牛眼轮机构与壁面紧密接触,提供支持力;前面的轮式爬壁单元A在地面进行粘/脱附运动,持续前进,逐渐从地面向壁面过渡,磁性连接弹簧B弯曲,牵引后面的轮式爬壁单元C实现过渡;②前面的轮式爬壁单元A侧向沿壁面进行过渡运动,过程中该轮式爬壁单元中一侧的轮足先与墙面紧密接触,提供粘附力,随后轮式爬壁单元中另一侧轮足与壁面接触并粘附,牛眼轮机构与壁面紧密接触,提供支持力;前面的轮式爬壁单元A持续前进,逐渐从地面向壁面过渡,磁性连接弹簧B扭转,牵引后面的轮式爬壁单元C实现地壁过渡;
第三种、如图9所示,对于轮式爬壁单元粘附失败而脱落的运动情况:若爬壁机器人在攀爬过程中,上面的轮式爬壁单元A粘附失效而脱落,而下面的轮式爬壁单元C由于位于后部,受到磁性连接弹簧B传递的力,随着其不断前进,使上面的脱落的轮式爬壁单元A得以再次接触壁面,实现新的粘附;
第四种、如图13、图14所示,由壁面向水平面270°过渡运动的运动情况:过渡运动临界前,轮式爬壁单元均粘附于壁面,下面的轮式爬壁单元C向上推进,压缩磁性连接弹簧B,对上面的轮式爬壁单元A进行托举,协助其粘附至水平面;上面的轮式爬壁单元A成功过渡后,向前推进,拉伸磁性连接弹簧B,对未完成过渡运动的轮式爬壁单元C进行牵引,帮助其完成过渡。
第五种、如图10、图11、图12所示,整体运动与分散作业的运动情况:各轮式爬壁单元之间通过磁性连接弹簧连接成一个整体,使运动过程更加有序高效;
到达目标位置进行分散作业时,各轮式爬壁单元前部电磁连接接口断电,磁性消失,机器人分散成若干轮式爬壁单元;
通过摄像头云台与群体控制,对各个轮式爬壁单元的四周进行监测并协同作业,通过单元所携带末端执行器完成相应任务。
- 多级串联可扩展式干粘附轮足爬壁机器人及其运动方法
- 多级串联可扩展式干粘附轮足爬壁机器人及其运动方法