一种设施运输机器人室内导航系统及导航方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明属于农业自动化技术领域,具体涉及一种设施运输机器人室内导航系统及导航方法。
背景技术
“设施种植是保障‘菜篮子’产品供应、促进农民增收和繁荣农村经济的有效途径。设施装备和机械化生产是设施种植高质量发展的重要支撑。”
近年来我国自主研发了多种类型的设施机器人,但在机器人采后运输方面,目前国内大部分设施温室仍采用手推车进行运输作业,少数温室采用了轨道式搬运车的方式来辅助运输果蔬和搬运物料,其自动化程度不高,作业效率较低;此外,传统或常用的导航设备价格较贵,且在设施室内密闭环境中导航精度不高。
因此,针对设施采后运输环节,蔬菜搬运劳动强度大、生产率低及智能化程度低等问题,研发一种适用于设施密闭环境的运输机器人室内导航系统及导航方法,可提高设施机械的智能化水平,提升采后运输的搬运效率。
发明内容
本发明针对上述问题,提出一种设施运输机器人室内导航系统,可实现机器人在设施大棚密闭环境下自主导航作业,解决劳动强度大、生产效率低、智能化程度低等现实问题。
为了解决上述存在的技术问题,本发明采用了以下方案:
一种设施运输机器人室内导航系统及导航方法,其特征在于,包括运输机器人和导航控制系统,所述导航控制系统分为直线行驶导航控制系统和地头转向导航控制系统,包括导航控制器、磁地标、超声波传感器、磁导航传感器、磁地标传感器、激光传感器、磁条、报警灯。
进一步地,所述磁导航传感器和磁地标传感器安装在运输机器人车身底部,用于实现地头转向导航。
进一步地,所述磁地标设置在转向轨迹的起点和终点,用于磁地标传感器接收到运输机器人转向轨迹起点的信号,保证在转弯时关闭激光传感器;所述磁条沿着转向轨迹铺设,确保运输机器人顺利转向。
进一步地,所述超声波传感器安装在运输机器人车身前端,用于探测运输机器人前方是否有障碍物;所述激光传感器安装在运输机器人车身左右两侧,用于探测左侧或右侧的设施围墙和运输机器人之间的距离,进而判断运输机器人车身中线相对预设路径是否存在横向偏差。
本发明的优点在于,该设施运输机器人室内导航系统导航成本低、导航方法简单,可实现机器人在设施大棚密闭环境下自主导航作业,满足设施园艺机械自动化、智能化要求。
附图说明
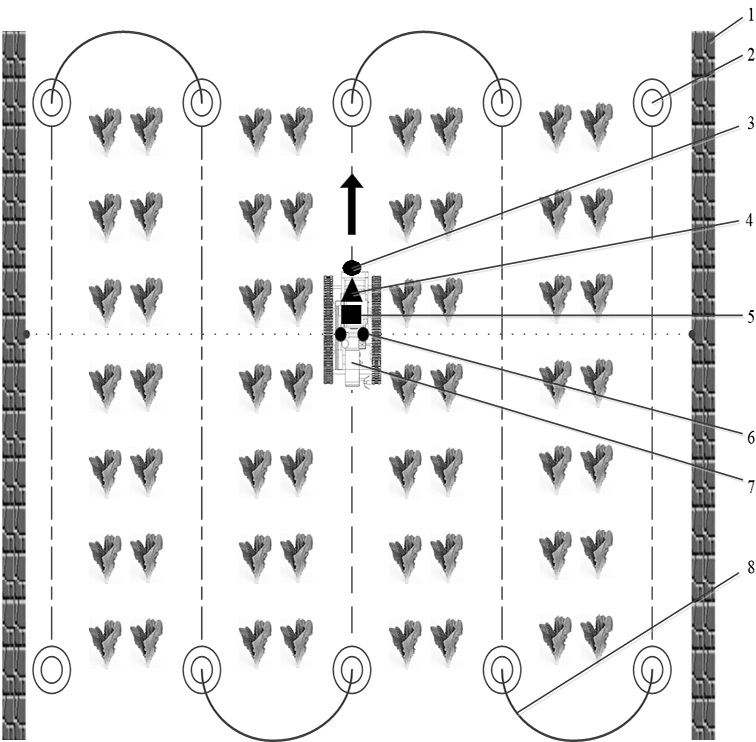
图1为本发明一种设施运输机器人室内导航系统及导航方法示意图;
图2为本发明一种设施运输机器人室内导航系统及导航方法紧急停车报警流程图。
附图标记说明:1-设施围墙;2-磁地标;3-超声波传感器;4-磁导航传感器;5-磁地标传感器;6-激光传感器;7-运输机器人;8-磁条。
具体实施方式
下面结合附图,对本发明做进一步说明。
如图1所示的一种设施运输机器人室内导航系统包括运输机器人7和导航控制系统,所述导航控制系统包括直线行驶导航控制系统和地头转向导航控制系统。
所述直线行驶导航控制系统通过左侧或右侧激光传感器6探测设施围墙1,即运输机器人7在进入设施行间后,激光传感器6通过探测左侧或右侧的设施围墙1和运输机器人7之间的距离,判断运输机器人7车身中线相对预设路径是否存在横向偏差;若存在横向偏差,导航控制器将根据横向偏差大小自动调整运输机器人7车身前进方向,确保运输机器人7在行间沿预设路径前进。
所述地头转向导航控制系统通过运输机器人7车身底部安装的磁导航传感器4和磁地标传感器5,来实现地头转向导航。在转向轨迹的起点和终点设有磁地标2,并沿着转向轨迹铺设磁条8;当运输机器人7行驶至地头时,磁地标传感器5接收到转向轨迹起点的磁地标2信号,激光传感器6关闭,磁导航传感器4开启,运输机器人7沿着磁条8转向,当磁地标传感器5接收到转向轨迹终点的磁地标2信号时,磁导航传感器4关闭,地头转向完成,激光传感器6重新开启,并纠正转向造成的偏差,调整运输机器人7方向,使运输机器人7车身中线与设施内种植行中线对齐,之后继续沿新的预设路径前进。
如图2所示,当运输机器人7在设施内种植行间工作时,利用超声波传感器3探测运输机器人7前方1.5米内是否有障碍物;若无障碍物,则运输机器人7继续在行间行走,并继续探测前方障碍物距离;反之,运输机器人7车身上的报警灯亮起,同时运输机器人7停车。
以上结合具体实施方式对本发明进行了示例性的描述,显然本发明的实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围内。
- 一种设施运输机器人室内导航系统及导航方法
- 一种室内机器人定位导航系统及信号采集方法