主瓣干扰下极化阵列子阵级空域-极化域联合自适应测角方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明属于阵列信号处理领域,具体涉及主瓣干扰下极化阵列子阵级空域-极化域联合自适应测角方法,为下一代雷达抗主瓣干扰提供技术支撑。
背景技术
雷达是现代及未来战争中的千里眼,直接决定着是否能发现、识别和截获目标,从而影响战争的胜负。从敌方的角度出发,他们想方设法阻止雷达看得清、看得远,最常用的方式是施放干扰。当前,雷达能较好地抑制副瓣干扰,而对于主瓣内多个干扰显得无所适从。难以对抗多个主瓣干扰的原因当前抑制主瓣干扰的方法是空域自适应,它将导致主波束严重畸变,进而使得测量真实目标角度性能严重下降。敌方正是抓住实装雷达该弱点,常常施放主瓣干扰,严重制约了我方作战效能发挥。
抗主瓣干扰已成为雷达届的主题,也是亟需解决的重大军事难题。多年来,雷达技术人员致力于探索抗主瓣干扰技术,取得了很多成果,但并未根本解决主瓣干扰问题。穷则思变!于是,雷达技术人员寻求新体制雷达和技术。极化阵列便应运而生,它能额外感知电磁波的极化信息,使其具有更好的抗干扰性能。当前,关于极化阵列的参数估计和自适应波束形成方面的研究硕果累累,但仍然存在以下两方面内容需要进一步研究:一是主瓣干扰背景下的参数估计,二是自适应测角技术。本发明正是在此背景下,发明主瓣干扰下极化阵列子阵级空域-极化域联合自适应测角方法,为下一代雷达抗主瓣干扰提供技术支撑。
发明内容
鉴于此,本发明提供了主瓣干扰下极化阵列子阵级空域-极化域联合自适应测角方法,以解决多个主瓣干扰下真实目标角度估计问题。
为了实现上述的发明目的,本发明提供了主瓣干扰下极化阵列子阵级空域-极化域联合自适应测角方法,包括以下技术步骤:
(1)将阵列划分成多个子阵,形成子阵通道数据;
(2)对每列子阵进行空域-极化域自适应波束形成,得到一行虚拟均匀线阵的接收数据;
(3)采用子空间方法求出真实目标的方位角;
(4)基于步骤(1)中的子阵通道数据,对每行子阵进行空域-极化域自适应波束形成,得到一列虚拟均匀线阵的接收数据;
(5)采用子空间方法求出真实目标的俯仰角。
本发明的优点在于通过子阵合成降低数据维度,提升了测角速度;通过空域-极化域联合自适应,对抗主瓣内多个干扰的同时,仍能较精确地测出目标的二维波达方向。
附图说明
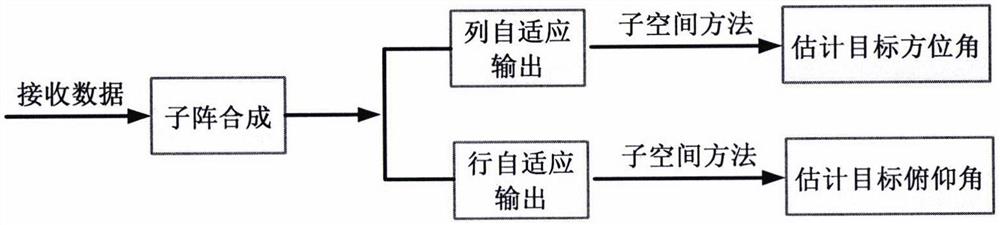
图1是本发明的实施例的结构框图。参照图1,本发明的实施例由子阵合成、求子阵列自适应输出、子空间方法求目标方位角、求子阵行自适应输出以及子空间方法求目标俯仰角组成。
具体实施方式
下面结合附图和具体实施例,进一步阐明本发明。假设阵列是由矢量传感器(共点式正交电偶极子)组成的M
该极化面阵的空域导向矢量表示为
其中
其中,上标(·)
其中,
其中,s
基于上述信号模型,本发明的详细主要步骤如下:
(1)将阵列划分成多个子阵,形成子阵通道数据。假设M
其中
(2)对每列子阵进行空域-极化域自适应波束形成,得到一行虚拟均匀线阵的接收数据。选择出第h列子阵通道数据方法为
x
其中
进而得到第h列子阵的自适应权为
其中,
那么N列子阵的自适应输出可组成一行虚拟均匀线阵的接收数据
(3)采用子空间方法求出真实目标的方位角。首先求得式(13)的协方差矩阵
其中,L表示快拍数。对协方差矩阵进行特征分解,得到噪声子空间E
上式中a
(4)基于步骤(1)中的子阵通道数据,对每行子阵进行空域-极化域自适应波束形成,得到一列虚拟均匀线阵的接收数据。选择出第g行子阵通道数据方法为
x
其中
进而得到第g行子阵的自适应权为
其中,
那么N行子阵的自适应输出可组成一列虚拟均匀线阵的接收数据
(5)采用子空间方法求出真实目标的俯仰角。首先求得式(20)的协方差矩阵
对协方差矩阵进行特征分解,得到噪声子空间E
上式中a
虽然结合附图描述了本发明的实施方式,但是本领域普通技术人员可以在所附权利要求的范围内做出各种变形或修改。
- 主瓣干扰下极化阵列子阵级空域-极化域联合自适应测角方法
- 雷达信号运动干扰空域-极化域联合稳健滤波方法