一种模块化自平衡双轮四足机器人
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及自动化控制和人工智能的技术领域,具体涉及一种模块化自平衡双轮四足机器人。
背景技术
共享(电)单车有故障率高、价格高、有服务盲区、需要去固定还车点还车、乱停乱放影响人行道通行、破损的车有损市容市貌、过度投放导致资源的浪费等缺点,更有甚者将消费者的押金挪作他用且长期不退还。同时,人们也有自己的家用电动自行车,但是存在续航短、室内危险充电、电池寿命短、假冒伪劣产品多等等问题,对政府来说,管理好电动自行车也是一个难点。
电动车是外卖行业最常用的交通工具,如今中国的外卖行业是全球发展最快最大的,但是也存在诸多问题:外卖骑手骑车过程中的安全问题和在农村乡镇等人口较少区域无人送外卖的问题等。
机器人行业(非工业机器人),有多种形态的机器人,比如四足、双足、轮式等,但是基本上都存在使用场景少的问题,同时,难以量产导致价格高昂是这个行业最大的问题,同时普遍存在道路通行性差和续航时间短的问题。
人工智能方面,人工智能软件程序需要一个可靠的可移动的载体,以获取大量数据,并且在其之上验证和优化数据算法,这样,算法才能有更大的用武之地。
发明内容
针对现有技术的不足,本发明提供了一种模块化的自平衡双轮四足机器人,解决了上述背景技术中提出的问题。
为实现以上目的,本发明通过以下技术方案予以实现:包括自行车本体,自行车本体上安装有电池和控制系统,所述自行车本体上还设有自平衡系统和四足系统,所述自平衡系统包括平衡组件和转向组件,所述平衡组件安装在车架头管前端,用于控制车辆平衡;所述转向组件固定在平衡组件上且与把手通过齿轮和皮带连接,转向组件通过控制把手的转动来控制自行车的转向;所述四足系统包括4个分别安装于前轮和后轮两侧具有三个自由度的四足组件,用于辅助自行车行走。
作为优选,所述平衡组件包括动量轮和动量轮电机,动量轮和动量轮电机之间设有动量轮减速器,所述动量轮通过固定在动量轮减速器的输出轴上,动量轮外部设有前盖和后盖组成的保护壳体,动量轮电机和动量轮减速器的外部设有电机保护壳,所述电机保护壳安装在车架头管前端的转接片上,动量轮电机与控制系统电连接。
作为优选,所述转向组件包括舵机和转向齿轮,转向齿轮固定在舵机的输出轴,转向齿轮通过皮带连接从动齿轮,从动齿轮固定在自行车本体的把手上,舵机外部设有保护壳。
作为优选,所述皮带一侧设有皮带压紧轮,皮带压紧轮通过固定板固定在电机保护壳上,皮带压紧轮将皮带绷紧,所述舵机与控制系统电连接。
作为优选,所述电池安装在自行车本体的电池安装区内,所述电池安装区的上部前端铰接设有电池盖板,电池盖板底部设有压紧条,电池盖板上铰接有电动伸缩杆,电动伸缩杆的另一端铰接设在自行车本体上,所述电池设有插接口,插接口设有快插件,快插件用于和固定在自行车本体上的连接头连接,电动伸缩杆、连接头均与控制系统电连接。
作为优选,所述四足组件包括一级电机、二级电机、三级电机、长管、短管、上支撑管以及下支撑管,所述一级电机固定在一级电机保护壳内,二级电机和三级电机安装在二三级电机保护壳内,一级电机保护壳通过四足固定板安装在自行车本体上,一级电机上设有一级减速器,一级减速器的输出轴设有转接套筒,转接套筒的另一端和二三级电机保护壳固定连接,套筒穿过导电滑环,导电滑环固定在套筒上,导电滑环的一端和二级电机、三级电机电连接,另一端和控制系统电连接,所述长管和短管固定在二三级电机保护壳两侧,长管和短管另一端与第一连接杆连接,二级电机上设有二级减速器,二级减速器的输出轴上设有第一齿轮,第一齿轮通过第一链条与设在第一连接杆一端的第二齿轮传动连接,第二齿轮带动第一连接杆转动,第一连接杆另一端设有旋转轴承套,旋转轴承套的两端设有第四齿轮和第五齿轮,所述三级电机上设有三级减速器,三级减速器的输出轴上设有第三齿轮,第三齿轮通过第二链条与第四齿轮传动连接,第四齿轮和第五齿轮双联同步运动,所述上支撑管一端固定在第一连接杆上,上支撑管的另一端设有第二连接杆,所述第二连接杆上设有所述下支撑管,所述第五齿轮通过第三链条与固定在第二连接杆上的第六齿轮传动连接,第六齿轮带动第二连接杆转动,第二连接杆带动下支撑管转动,下支撑管底部设有防滑块,所述一级电机与控制系统电连接,导电滑环一端与二级电机、三级电机电连接,另一端与控制系统电连接。
作为优选,所述第一链条位于长管内,第二链条位于短管内,第三链条位于上支撑管内;第一链条、第二链条、第三链条均设有链条压紧组件。
作为优选,所述链条压紧组件包括固定在长管或短管或上支撑管上的齿轮罩,齿轮罩内部通过调节螺栓设有齿轮座,齿轮座内活动设有压紧齿轮,压紧齿轮与第一链条或第二链条或第三链条啮合连接。
作为优选,所述自行车本体上设有若干用于检测车身状态的姿态传感器,姿态传感器与控制系统电连接。
作为优选,所述上支撑管和下支撑管分别设有一个用于检测支撑管状态的姿态传感器,姿态传感器和控制系统无线连接。
作为优选,所述动量轮与车身前后轴向垂直且垂直水平面。
本发明提供了一种模块化自平衡双轮四足机器人,具备以下有益效果:
(1)可换电设计,通过远程信号控制电动推杆,打开盖板,即可换电池包。电池包具有快插接口;
(2)模块化设计,所以可根据实际需求选择:1、无足双轮自平衡机器人,2、双足双轮自平衡机器人,3、四足双轮自平衡机器人,从而适用于不同的场景;
(3)全场景通行,平路上行驶的时候,四足收起,双轮行走;非平整路面,四足撑起,用四足行走;每足具有3个自由度,可以模仿动物行走的姿态;由于双轮的可通行范围远远大于四轮,再加上四足可以到那些轮式机器人无法到达的场景,所以它可以为未来的人工智能算法提供一个很好的移动载体和数据获取入口;
(4)因为是双轮且不会倒(利用了角动量守恒定理),所以就可以做成移动式的共享电单车,召之即来挥之即去(哪里需要它,它就去哪里,用完放一边即可,它会自主去寻找下一个客户),在多数路段可以用双轮双足提供服务,大大降低硬件成本,在野外场景可以用双轮四足。
附图说明
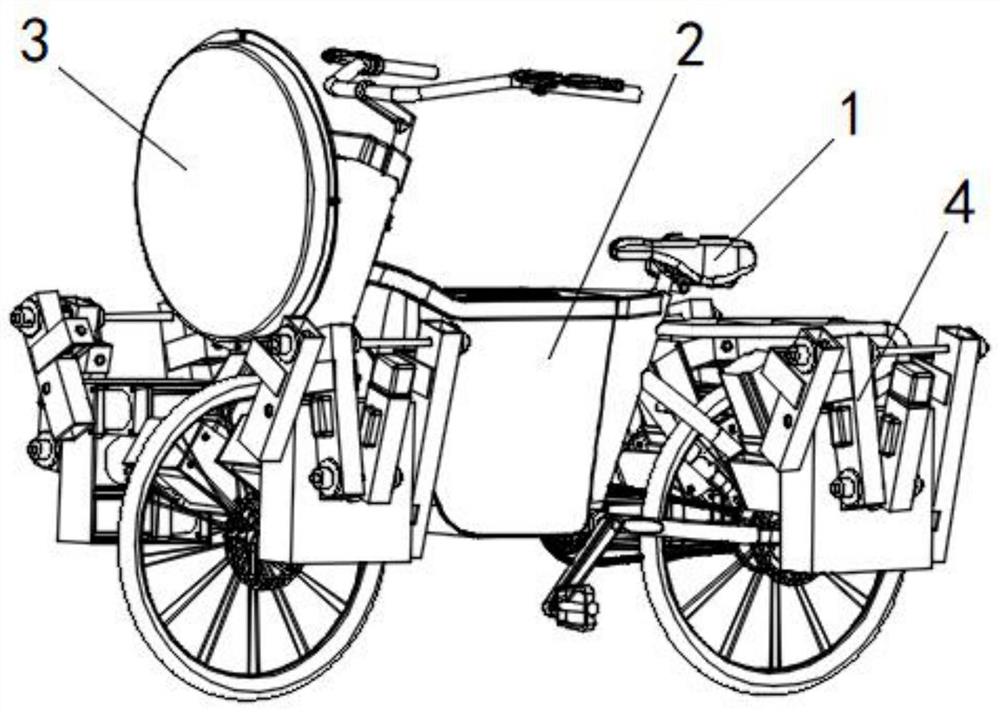
图1为本发明的结构示意图;
图2为本发明自平衡组件和转向组件的安装示意图;
图3为本发明自平衡组件的结构示意图;
图4为本发明转向组件的结构示意图;
图5为本发明电池的安装结构示意图;
图6为本发明电池的快插结构示意图;
图7为本发明一级电机、二级电机、三级电机的安装结构示意图;
图8为本发明四足组件的部分结构示意图;
图9为本发明四足组件的传动结构示意图;
图10为本发明链条压紧组件的结构示意图;
图11为本发明姿态传感器的安装示意图;
图12为本发明四足收起时的状态示意图;
图13为本发明四足张开时的状态示意图;
图14为本发明四足行走时的状态示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
如图1-11所示,一种模块化自平衡双轮四足机器人,包括自行车本体1,自行车本体1上安装有电池2和控制系统,所述自行车本体1上还设有自平衡系统3和四足系统,所述自平衡系统3包括平衡组件31和转向组件33,所述平衡组件31安装在车架头管101前端,用于控制自行车平衡;所述转向组件33固定在平衡组件31上且与把手102通过齿轮和皮带连接,转向组件33通过控制把手102的转动来控制自行车的转向;所述四足系统包括4个分别安装于前轮和后轮两侧具有三个自由度的四足组件4,用于辅助自行车行走,所述平衡组件31包括动量轮322和动量轮电机327,动量轮322和动量轮电机327之间设有动量轮减速器326,所述动量轮322固定在动量轮减速器326的输出轴上,动量轮322外部设有前盖321和后盖324组成的保护壳体,动量轮电机327和动量轮减速器326的外部设有电机保护壳32,所述电机保护壳32安装在车架头管101前端的转接片34上,动量轮电机327与控制系统电连接,所述转向组件33包括舵机334和转向齿轮335,转向齿轮335固定在舵机334的输出轴,转向齿轮335通过皮带332和从动齿轮333连接,从动齿轮333固定在自行车把手102上,舵机334外部设有保护壳331,所述皮带332一侧设有皮带压紧轮337,皮带压紧轮337通过固定板336固定在电机保护壳32上,皮带压紧轮337将皮带332绷紧,舵机334与控制系统电连接,所述电池2安装在自行车本体1的电池安装区103内,所述电池安装区103的上部前端铰接设有电池盖板104,电池盖板104底部设有压紧条105,电池盖板104上铰接有电动伸缩杆106,电动伸缩杆106的另一端铰接设在自行车本体上,所述电池2设有插接口201,插接口201设有快插件5,快插件5用于和固定在自行车本体1上的连接头6连接,电动伸缩杆106、连接头6均与控制系统电连接,所述四足组件4包括一级电机403、二级电机407、三级电机407、长管410、短管411、上支撑管412以及下支撑管413,所述一级电机403固定在一级电机保护壳402内,二级电机407和三级电机408安装在二三级电机保护壳406内,一级电机保护壳402通过四足固定板401安装在自行车本体1上,一级电机403上设有一级减速器425,一级减速器425的输出轴设有转接套筒405,转接套筒405的另一端和二三级电机保护壳406固定连接,转接套筒405穿过导电滑环404,导电滑环404固定在套筒405上,导电滑环404的一端和二级电机407、三级电机408电连接,另一端和控制系统电连接,所述长管410和短管411固定在二三级电机保护壳406两侧,长管410和短管411另一端与第一连接杆415连接,二级电机407上设有二级减速器426,二级减速器426的输出轴上设有第一齿轮424,第一齿轮424通过第一链条422与设在第一连接杆415一端的第二齿轮428传动连接,第二齿轮428带动第一连接杆415转动,第一连接杆415另一端设有旋转轴承套419,旋转轴承套419的两端设有第四齿轮420和第五齿轮429,所述三级电机408上设有三级减速器427,三级减速器427的输出轴上设有第三齿轮421,第三齿轮421通过第二链条430与第四齿轮420传动连接,第四齿轮420和第五齿轮429在旋转轴套419上双联同步运动,所述上支撑管412一端固定在第一连接杆415上,上支撑管412的另一端设有第二连接杆417,所述第二连接杆417上设有所述下支撑管413,所述第五齿轮429通过第三链条431与固定在第二连接杆417上的第六齿轮423传动连接,第六齿轮带动第二连接杆转动,第二连接杆带动下支撑管转动,下支撑管413底部设有防滑块414,所述一级电机403与控制系统电连接,导电滑环405一端与二级电机407、三级电机408电连接,另一端与控制系统电连接,所述第一链条422位于长管410内,第二链条430位于短管411内,第三链条431位于上支撑管412内;第一链条422、第二链条430、第三链条431均设有链条压紧组件,所述链条压紧组件包括固定在长管410或短管411或上支撑管412上的齿轮罩416,齿轮罩416内部通过调节螺栓433设有齿轮座432,齿轮座432内活动设有压紧齿轮418,压紧齿轮418与第一链条422或第二链条430或第三链条431啮合连接,所述上支撑管412和下支撑管413分别设有一个用于检测支撑管状态的姿态传感器7,姿态传感器7和控制系统无线连接,所述动量轮322与车身前后轴向垂直且垂直水平面。
实际使用时,车架上的姿态传感器检测车身倾斜的状态,将倾斜状态信息反馈给控制系统,控制系统根据反馈信息并通过一定的算法,计算出动量轮322需要的旋转方向和转速,从而控制动量轮电机327使车辆保持平衡,转向时,控制舵机334使自行车把手转向。从车尾视角看,车身左倾斜时,动量轮逆时针加速旋转(车身会产生一个向右的扭力),同理,车身右倾斜时,动量轮顺时针加速旋转(车身会产生一个向左的扭力),即用到了卫星姿态控制场景下的角动量守恒定定理,通过控制动量轮的旋转速度和方向,就可控制车身的左右平衡。
通过姿态传感器7检测支撑管的状态,将支撑管的状态信息反馈给控制系统,控制系统计算出各个支撑管的位置信息,即可得出整体四足姿态信息,进而更好得控制四足运动。
通过控制系统控制电动伸缩杆106使电池盖板104打开,即可方便的取出电池2进行更换,安装电池2时将快插件5插入电池2的插接口201内,将电池2放入电池安装区103,快插件5与固定在自行车本体1上的连接头6快速完成插接,从而使电池2为整个系统供电,控制电动伸缩杆106关闭电池盖板104完成电池安装。
通过一级电机403可以控制二三级电机保护壳旋转,从而完成对长管410、短管411以及其上所有部件的旋转,通过二级电机407可以控制第一连接杆415转动,第一连接杆415带动上支撑管412转动,通过三级电机408可以控制旋转轴套419转动,旋转轴套419又带动第六齿轮423和第二连接杆417转动,第二连接杆417转动带动下支撑管413完成旋转,因此,通过控制一级电机403、二级电机407、三级电机408就可让每足获得3个自由度,其中一个自由度是平行于车身轴向,两个自由度是垂直于车身轴向,四足同时作用,就可抬起车身,成为一个可以行走的四足机器人,调节螺栓433可以调节压紧齿轮418的压紧度。
图12-14分别展示了本发明四足收起时、四足张开时以及四足行走时的使用状态。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种动量轮后置模块化自平衡双轮四足/双足机器人
- 一种双轮足混合自平衡机器人