一种基于人工智能的钢包喷溅检测方法及系统
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及人工智能技术领域,具体涉及一种基于人工智能的钢包喷溅检测方法及系统。
背景技术
钢包用于炼钢厂、铸造厂在平炉、电炉或转炉前承接钢水,进行部分脱氧与合金化操作,可以使钢水在其中镇静一段时间,以调整钢水温度,均匀成分并使钢水中非金属夹杂物上浮,同时,在浇注过程中开闭钢流,控制钢水钢液流量,使浇注顺利进行。
发明人在实践中,发现上述现有技术存在以下缺陷:
钢包在工作过程中往往会出现钢水中氧与投入包底的碳化硅反应的情况,产生大量的一氧化碳气体。同时,由于钢水过氧化,钢中氧含量高,钢中氧的溶解度随着温度的降低而下降,随着温度的下降钢中的氧大量析出,产生大量气体,会导致钢水喷出,对工作人员的人身安全造成威胁。
发明内容
为了解决上述技术问题,本发明的目的在于提供一种基于人工智能的钢包喷溅检测方法及系统,所采用的技术方案具体如下:
第一方面,本发明一个实施例提供了一种基于人工智能的钢包喷溅检测方法,其特征在于,该方法包括以下步骤:
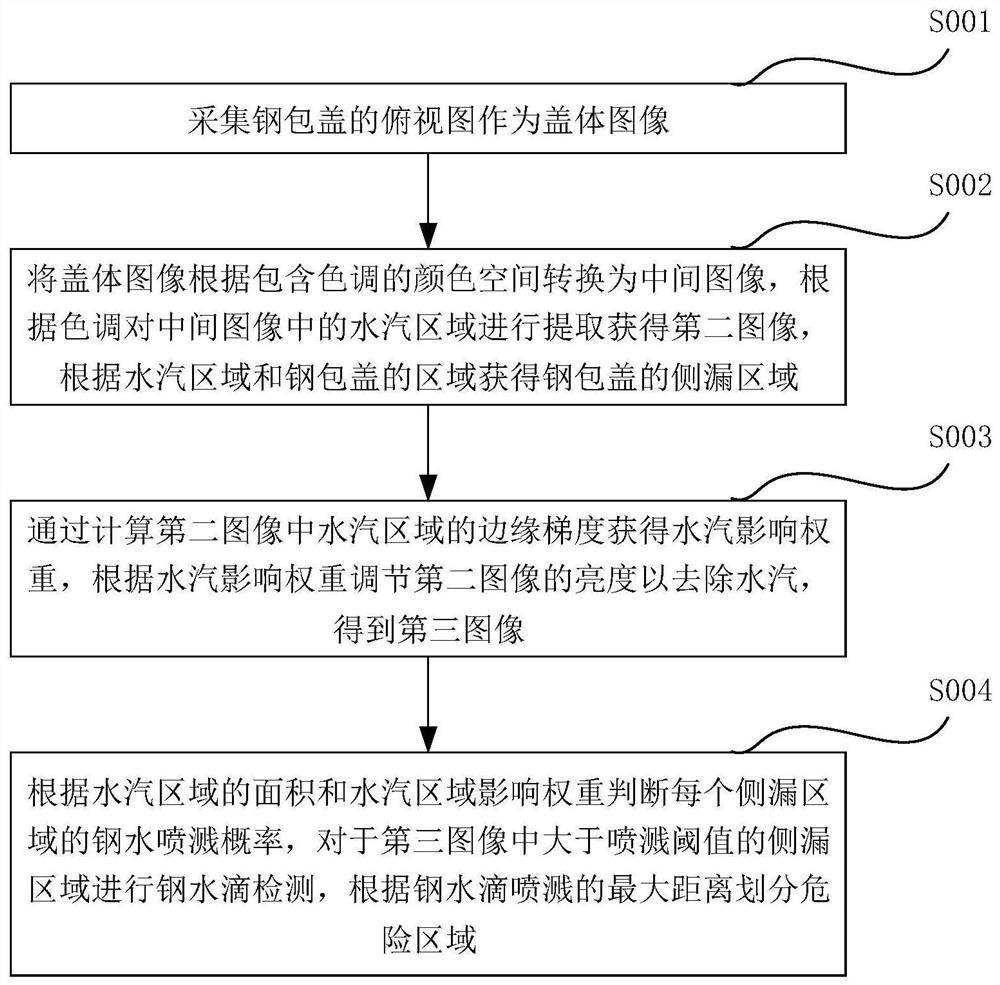
采集钢包盖的俯视图作为盖体图像;
将盖体图像根据包含色调的颜色空间转换为中间图像,根据色调对中间图像中的水汽区域进行提取获得第二图像,根据水汽区域和钢包盖的区域获得钢包盖的侧漏区域;
通过计算第二图像中水汽区域的边缘梯度获得水汽影响权重,根据水汽影响权重调节第二图像的亮度以去除水汽,得到第三图像;
根据水汽区域的面积和水汽区域影响权重判断每个侧漏区域的钢水喷溅概率,对于第三图像中大于喷溅阈值的侧漏区域进行钢水滴检测,根据钢水滴喷溅的最大距离划分危险区域。
优选的,钢包的侧漏区域的获取步骤包括:
根据第二图像检测水汽区域的轮廓和钢包盖的轮廓;
根据水汽区域的轮廓和钢包盖的轮廓的重叠区域确定侧漏区域。
优选的,去除水汽的步骤包括:
根据第二图像中的不同水汽区域获取水汽影响权重序列,计算所有水汽影响权重的权重方差;
权重方差小于等于方差阈值时,以所有水汽影响权重的均值作为去水汽权重对第二图像进行去水汽;
权重方差大于方差阈值时,对第二图像中的不同水汽区域进行分块去除。
优选的,对第二图像进行去水汽时,对水汽影响权重进行更新,更新的方法为:
计算第三图像中去除水汽的区域与初始图像对应的区域之间的亮度差值,根据亮度差值对水汽影响权重进行校正更新。
优选的,进行钢水滴检测的侧漏区域为:
判断大于喷溅阈值的侧漏区域中喷溅概率最大的目标侧漏区域,检测目标侧漏区域的钢水滴。
第二方面,本发明另一个实施例提供了一种基于人工智能的钢包喷溅检测系统,其特征在于,该系统包括以下模块:
图像采集模块,用于采集钢包盖的俯视图作为盖体图像;
侧漏区域获取模块,用于将盖体图像根据包含色调的颜色空间转换为中间图像,根据色调对中间图像中的水汽区域进行提取获得第二图像,根据水汽区域和钢包盖的区域获得钢包盖的侧漏区域;
水汽去除模块,用于通过计算第二图像中水汽区域的边缘梯度获得水汽影响权重,根据水汽影响权重调节第二图像的亮度以去除水汽,得到第三图像;
危险区域划分模块,用于根据水汽区域的面积和水汽区域影响权重判断每个侧漏区域的钢水喷溅概率,对于第三图像中大于喷溅阈值的侧漏区域进行钢水滴检测,根据钢水滴喷溅的最大距离划分危险区域。
优选的,侧漏区域获取模块包括:
轮廓获取模块,用于根据第二图像检测水汽区域的轮廓和钢包盖的轮廓;
侧漏区域确定模块,用于根据水汽区域的轮廓和钢包盖的轮廓的重叠区域确定侧漏区域。
优选的,水汽去除模块包括:
水汽影响权重序列获取模块,用于根据第二图像中的不同水汽区域获取水汽影响权重序列,计算所有水汽影响权重的权重方差;
整体去除模块,用于权重方差小于等于方差阈值时,以所有水汽影响权重的均值作为去水汽权重对第二图像进行水汽去除;
分块去除模块,用于权重方差大于方差阈值时,对第二图像中的不同水汽区域进行分块去除。
优选的,水汽去除模块还包括权重更新模块,用于对水汽影响权重进行更新,权重更新模块包括:
亮度差值计算模块,用于计算第三图像中去除水汽的区域与初始图像对应的区域之间的亮度差值,根据亮度差值对水汽影响权重进行校正更新。
优选的,危险区域划分模块包括:
目标侧漏区域判断模块,用于判断大于喷溅阈值的侧漏区域中喷溅概率最大的目标侧漏区域,检测目标侧漏区域的钢水滴。
本发明具有如下有益效果:
1.通过水汽影响权重对水汽区域图像进行处理,得到无水汽图像,通过对权重系数的不断优化,保证能够得到较好的无水汽图像。
2.通过计算钢水滴的最大位移距离得到喷溅危险区域大小,能够更好的降低钢水喷溅的危险性。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案和优点,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
图1为本发明一个实施例所提供的一种基于人工智能的钢包喷溅检测方法的流程图;
图2为本发明一个实施例所提供的一种基于人工智能的钢包喷溅检测方法的步骤流程图;
图3为本发明一个实施例所提供的一种基于人工智能的钢包喷溅检测系统的结构框图。
具体实施方式
为了更进一步阐述本发明为达成预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明提出的一种基于人工智能的钢包喷溅检测方法及系统,其具体实施方式、结构、特征及其功效,详细说明如下。在下述说明中,不同的“一个实施例”或“另一个实施例”指的不一定是同一实施例。此外,一或多个实施例中的特定特征、结构、或特点可由任何合适形式组合。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。
下面结合附图具体的说明本发明所提供的一种基于人工智能的钢包喷溅检测方法及系统的具体方案。
请参阅图1和图2,图1示出了本发明一个实施例提供的一种基于人工智能的钢包喷溅检测方法的流程图,图2示出了本发明一个实施例所提供的一种基于人工智能的钢包喷溅检测方法的步骤流程图,该方法包括以下步骤:
步骤S001,采集钢包盖的俯视图作为盖体图像。
具体的步骤包括:
1)在钢包旋转臂上安装耐高温相机,对钢包盖俯视拍摄,得到钢包盖的RGB图像,提取其中一帧图像进行检测分析。
2)通过对图像进行必要的去噪处理,降低噪声点对图像检测的影响。
在本发明实施例中,去噪算法采用中值滤波去噪,能够很好地去除图像中的椒盐噪声,保留图像像素间原有的特征。在其他实施例中,还可以采用其他的能够实现相同功能的去噪算法。
步骤S002,将盖体图像根据包含色调的颜色空间转换为中间图像,根据色调对中间图像中的水汽区域进行提取获得第二图像,根据水汽区域和钢包盖的区域获得钢包盖的侧漏区域。
具体的步骤包括:
1)对去噪后的图像的每个像素的RGB通道值进行操作。
I(x)=[I
其中I
盖体图像像素为:
I′(x)=[I′
其中,I′(x)表示处理后的像素值,I′
I′
I′
I′
2)通过将通道值处理过后的图像与原图像进行对比,将处理后的图像的RGB色彩空间转化为包含色调的颜色空间,作为一个示例,本发明实施例中将其转化为HSI色彩空间,用H表示图像的色调,通过比较水汽区域和钢包区域的色调差来区分水汽和钢包。色调H转换为:
3)通过比较图像在HSI色彩空间下的色度值,检测出水汽区域。
|H′(x)-H(x)|<K
其中,H′(x)表示处理后图像的色度,H(x)表示原图像的色度。
K为设定的阈值,所有小于阈值K的图像像素为水汽区域。
作为一个示例,本发明实施例中K=10。
在其他实施例中,还可以将RGB图像转化为HSL空间、HSV空间等。
4)根据第二图像检测水汽区域的轮廓和钢包盖的轮廓。
利用边缘检测算法检测第二图像中水汽区域的轮廓;利用霍夫拟合算法对钢包盖轮廓进行检测,得到钢包盖的轮廓映射曲线圆。
作为一个示例,本发明实施例中的边缘检测使用Canny算子检测,在其他实施例中,还可以采用其他的能够实现相同效果的其他边缘检测算法。
5)根据水汽区域的轮廓和钢包盖的轮廓的重叠区域确定侧漏区域。
通过计算水汽区域的轮廓与钢包盖的轮廓映射曲线圆的交集来确定侧漏区域的位置。确定钢包盖的测漏区域后对该区域进行图像标记,及时进行检查和处理。
步骤S003,通过计算第二图像中水汽区域的边缘梯度获得水汽影响权重,根据水汽影响权重调节第二图像的亮度以去除水汽,得到第三图像。
具体的步骤包括:
1)获取第二图像中的不同水汽区域的水汽影响权重序列,计算所有水汽影响权重的权重方差。
具体的,得到水汽区域后,通过计算水汽区域和无水汽区域的边缘梯度值来得到水汽影响权重W:
其中,I
作为一个示例,在本发明实施例中归一化方法采用最大最小值归一化。
第二图像中存在的水汽区域不止一处,且水汽区域的亮度值分布不同,所以根据不同的水汽区域的边缘梯度值得到水汽影响权重序列[W
其中,
2)权重方差小于等于方差阈值时,以所有水汽影响权重的均值作为去水汽权重对第二图像进行去水汽。
取所有水汽区域中最高亮度值I
其中,I
其中,方差阈值为经验阈值,作为一个示例,在本发明实施例中方差阈值的取值为0.5。
3)权重方差大于方差阈值时,对第二图像中的不同水汽区域进行分块去除。
根据亮度计算公式进行分块计算:
其中,I
只从水汽区域而不是从整张图像中找最大亮度值点更具有鲁棒性。
优选的,上述去除水汽的方法是根据水汽区域最高亮度值与权重的乘积进行去除的,因此有可能会出现水汽去除力度较大导致图像过暗或者去除力度不足导致图像去水汽效果不理想的情况,本发明实施例需要通过判断图像去除水汽的效果,进而对水汽影响权重进行修正,以修正去除水汽的第三图像。
具体的,在钢包未开始工作前,保证相同的环境条件条件,采集与盖体图像相同位置的图像,获取初始图像,用于校正去水汽权重参数W
计算第三图像中去除水汽的区域与初始图像对应的区域之间的亮度差值,根据亮度差值对水汽影响权重进行校正更新。
经过去水汽处理后的图像与钢包在该位置处的初始图像进行亮度值对比,得到相同区域的亮度值I
diff=I
需要说明的是,亮度差值diff是有符号的,正值说明权重系数需要正向更新,负值需要反向更新。
当diff≈0时,去水汽权重无需更新,其精度到0.01,当diff≠0时,说明权重D
将更新后的权重W
需要说明的是,权重迭代次数为最多10次,防止出现无法完全收敛的情况。如果迭代10次仍未满足验证,取迭代值中的最小值作近似权重更新。
4)对去水汽后的图像进行图像校正。
通常去水汽处理后图像的亮度偏暗,对融合后的图像进行空域上对比度拉伸变换将像素上的灰度值映射到更大的灰度空间:
其中,G′(x,y)表示图像校正之后的图像灰度值,G(x,y)表示去除水汽之后的图像灰度值,G
步骤S004,根据水汽区域的面积和水汽区域影响权重判断每个侧漏区域的钢水喷溅概率,对于第三图像中大于喷溅阈值的侧漏区域进行钢水滴检测,根据钢水滴喷溅的最大距离划分危险区域。
具体的步骤包括:
1)将第三图像转换为RGB色彩空间,获得RGB图像,并进行灰度化。
2)根据水汽影响权重序列W
其中,Q
3)通过设定喷溅阈值G来判断测漏点是否有钢水喷溅的危险。
当Q
作为一个示例,本发明实施例中G的取值为0.7。
4)划分危险区域。
具体的:
4.1)判断大于喷溅阈值的侧漏区域中喷溅概率最大的目标侧漏区域,检测目标侧漏区域的钢水滴。
根据步骤2)中得到的包盖测漏点区域的喷溅概率,可以判断出估计值Qi越大,喷溅的可能性越大,钢水滴喷溅的距离和数量就会越远。因此选择喷溅概率最大的目标侧漏区域,划分出最大的危险范围。
由于钢水喷溅的水滴较小,呈现暗红色,所以利用小目标检测图像中是否存在钢水喷溅。
本发明实施例采用SM(scale match)小目标检测算法对较小的钢水滴进行检测。
SM小目标检测网络训练的具体步骤如下:
a)网络采用Encoder-FC的结构,首先对第三图像的灰度图像进行图像编码,而后进行解码。网络的输入为图像,输出为包围框的中心点和包围框的宽高尺寸以及旋转角度。
b)通过RstNet50网络进行卷积、平均池化操作在对图像进行下采样的过程中,提取图像中的空域特征,编码器的输出为提取到的特征图。
c)以Softmax层为输出层判断锚点是属于前景还是背景,利用边框回归来获得精确的包围框。
d)通过IOU标准进行性能评估,交并比IOU阈值设为0.5。
e)采用的损失函数为分类损失函数和回归损失函数叠加。
4.2)确定钢水滴的横向最大距离,以横向最大距离与钢包的底部半径之和作为半径,以钢包底部中心为圆心画圆,获得危险区域。
通过对连续帧中钢水滴的瞬时速度V
根据先验已知钢水滴喷溅轨迹是一个抛物线,通过钢水滴包围框中心点在相邻帧图像中横向和纵向方向位移距离L
其中,
作为一个示例,本发明实施例中为相机的采样速度12帧/秒。
钢包盖距离地面的高度h和钢包的底部半径r通过先验得到,根据钢水滴的瞬时速度得到钢水滴的横向最大位移距离L
将(L
综上所述,本发明实施例提出一种基于人工智能的钢包喷溅检测方法。通过在钢包机械臂上固定耐高温相机,对钢包盖俯视图进行图像采集。计算水汽影响权重,通过权重更新根据图像亮度分布和水汽影响权重完成去除图像中水汽工作,避免水汽对检测造成影响,同时预测钢水喷溅概率,做好提前预警;并根据水汽区域相关特征得到钢水滴喷溅的危险区域大小。本发明实施例能够得到效果更好的无水汽图像,能够估计钢水喷溅概率,划分危险区域,对其做出警示,提高工作场所的安全性。
基于与上述方法相同的发明构思,本发明另一个实施例提供了一种基于人工智能的钢包喷溅检测系统,请参阅图3,该系统包括以下模块:
图像采集模块1001、侧漏区域获取模块1002、水汽去除模块1003以及危险区域划分模块1004。
图像采集模块1001用于采集钢包盖的俯视图作为盖体图像;侧漏区域获取模块1002用于将盖体图像根据包含色调的颜色空间转换为中间图像,根据色调对中间图像中的水汽区域进行提取获得第二图像,根据水汽区域和钢包盖的区域获得钢包盖的侧漏区域;水汽去除模块1003用于通过计算第二图像中水汽区域的边缘梯度获得水汽影响权重,根据水汽影响权重调节第二图像的亮度以去除水汽,得到第三图像;危险区域划分模块1004用于根据水汽区域的面积和水汽区域影响权重判断每个侧漏区域的钢水喷溅概率,对于第三图像中大于喷溅阈值的侧漏区域进行钢水滴检测,根据钢水滴喷溅的最大距离划分危险区域。
优选的,侧漏区域获取模块包括:
轮廓获取模块,用于根据第二图像检测水汽区域的轮廓和钢包盖的轮廓;
侧漏区域确定模块,用于根据水汽区域的轮廓和钢包盖的轮廓的重叠区域确定侧漏区域。
优选的,水汽去除模块包括:
水汽影响权重序列获取模块,用于根据第二图像中的不同水汽区域获取水汽影响权重序列,计算所有水汽影响权重的权重方差;
整体去除模块,用于权重方差小于等于方差阈值时,以所有水汽影响权重的均值作为去水汽权重对第二图像进行水汽去除;
分块去除模块,用于权重方差大于方差阈值时,对第二图像中的不同水汽区域进行分块去除。
优选的,水汽去除模块还包括权重更新模块,用于对水汽影响权重进行更新,权重更新模块包括:
亮度差值计算模块,用于计算第三图像中去除水汽的区域与初始图像对应的区域之间的亮度差值,根据亮度差值对水汽影响权重进行校正更新。
优选的,危险区域划分模块包括:
目标侧漏区域判断模块,用于判断大于喷溅阈值的侧漏区域中喷溅概率最大的目标侧漏区域,检测目标侧漏区域的钢水滴。
综上所述,本发明实施例提出一种基于人工智能的钢包喷溅检测系统。通过图像采集模块1001在钢包机械臂上固定耐高温相机,对钢包盖的俯视图进行图像采集。通过侧漏区域获取模块1002确定钢包盖的侧漏区域。通过水汽去除模块1003计算水汽影响权重,通过权重更新根据图像亮度分布和水汽影响权重完成去除图像中水汽工作,避免水汽对检测造成影响,同时通过危险区域划分模块1004预测钢水喷溅概率;并根据水汽区域相关特征得到钢水滴喷溅的危险区域大小。本发明实施例能够得到效果更好的无水汽图像,能够估计钢水喷溅概率,划分危险区域,对其做出警示,提高工作场所的安全性。
需要说明的是:上述本发明实施例先后顺序仅仅为了描述,不代表实施例的优劣。且上述对本说明书特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于人工智能的钢包喷溅检测方法及系统
- 一种基于人工智能的健身设施异常检测方法及系统