一种倾转翼、固定翼混合型无人机
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及无人机技术领域,具体地,涉及一种倾转翼、固定翼混合型无人机。
背景技术
当前旋翼无人机普遍采用固定旋翼的设计,采用这种结构的无人机,通过控制固定旋翼的转速来实现起飞与悬停。对于固定旋翼无人机的转向问题,一般较难被解决。当前采用的方式大多采用对部分固定旋翼的旋转速度进行控制,从而使机身前倾,从而实现无人机的转向。但是这种设计改变了无人机的飞行状态,限制了无人机在运载等要求机身平稳的方向的应用。与此同时,机身前倾加大了无人机受到的阻力,从而增大了功耗,减少了续航时间。本发明在普通固定旋翼无人机基础上改进,采用固定旋翼、倾转旋翼混合的方式,在保留既有优势的同时,又解决了固定旋翼无人机无法水平转向、飞行轨迹不易精确控制、无法高速前行的问题。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种倾转翼、固定翼混合型无人机,以解决当前普通旋翼无人机无法水平转向、飞行轨迹不易精确控制、无法高速前行的问题。
为解决上述技术问题,本发明通过以下方案来实现:
一种倾转翼、固定翼混合型无人机,其特征在于,包括:
机架,固定于机架左上、左下、右上、右下四个方向孔洞中的四个固定翼,固定于机架正上、正下、正左、正右四个方向孔洞中的四个倾转部分,覆盖在机架上的机盖,镶嵌于机架内部的中心控制部件;
所述固定翼包括:固定在机架上的直流无刷电机,位于直流无刷电机上部的螺旋桨;
所述倾转部分包括:伺服电机,与伺服电机相连的伺服电机驱动齿轮,与伺服电机驱动齿轮相咬合的倾转轴驱动齿轮,穿过倾转轴驱动齿轮的倾转轴,位于倾转轴中部的旋翼部分;
所述旋翼部分包括:与倾转轴相连的电机倾转底座,设于电机倾转底座上部并与之相连的电机,设于电机上部并与之相连的螺旋桨;
优选地、所述的伺服电机选用直流无刷伺服电机。
优选地、所述螺旋桨由中心线向边缘两侧延伸方向厚度逐渐减小。
优选地、所述机盖通过螺丝固定并覆盖在机架上。
附图说明
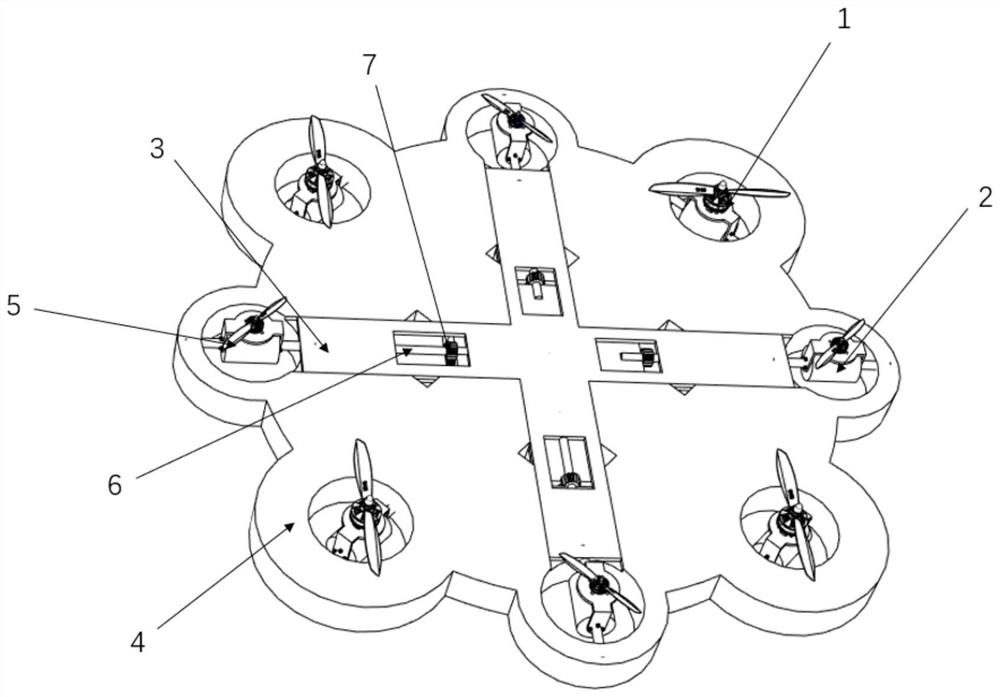
图1为本发明正上方的立体结构示意图;
图2为本发明主体结构的内部结构示意图;
图3为本发明倾转旋翼部分内部结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
一种倾转翼、固定翼混合型无人机,其特征在于,包括:
机架4,固定于机架4左上、左下、右上、右下四个方向孔洞中的四个固定翼1,固定于机架4正上、正下、正左、正右四个方向孔洞中的四个倾转部分5,覆盖在机架上的机盖3,镶嵌于机架内部的中心控制部件;
所述固定翼1包括:固定在机架4上的直流无刷电机,位于直流无刷电机上部的螺旋桨;
所述倾转部分包括:伺服电机9,与伺服电机9相连的伺服电机驱动齿轮8,与伺服电机驱动齿轮8相咬合的倾转轴驱动齿轮7,穿过倾转轴驱动齿轮7的倾转轴6,位于倾转轴6中部的旋翼部分;
所述旋翼部分包括:与倾转轴6相连的电机倾转底座11,设于电机倾转底座11上部并与之相连的电机,设于电机上部并与之相连的螺旋桨10;
优选地、所述的伺服电机9选用直流无刷伺服电机。
优选地、所述螺旋桨10由中心线向边缘两侧延伸方向厚度逐渐减小。
优选地、所述机盖3通过螺丝固定并覆盖在机架4上。
相应地,本发明还提出了采用上述的一种倾转翼、固定翼混合型无人机使用方法,其包括步骤:
在无人机的起飞过程中,四个固定旋翼的伺服电机开始工作,提供无人机起飞的主要升力。四个倾转旋翼的伺服电机开始工作,通过齿轮组的传动,使倾转轴旋转,倾转轴驱动齿轮带动的整体与地面成水平状态,四个倾转旋翼与地面呈平行态,与固定旋翼一同提供向上的升力,实现无人机的垂直起飞。
当无人机需要进行空中悬停时,固定旋翼继续工作,倾转旋翼通过伺服电机的控制与地面呈水平态。固定翼与倾转旋翼共同提供无人机所需的升力,实现空中悬停。
当无人机需要进行转向时,固定旋翼继续工作,提供无人机所需的升力。倾转旋翼的伺服电机控制齿轮组的转动,四个倾转旋翼相匹配的伺服电机的作用下发生倾转,使无人机获得与无人机目标转向方向相反的推力,从而实现无人机向指定方向的转向。
在无人机的降落过程中,倾转旋翼所匹配的伺服电机控制齿轮组的转动,使得倾转轴驱动齿轮带动的整体旋转一定角度,与地面成水平状态,与固定旋翼方向一致。固定旋翼与倾转旋翼均开始降低转速,无人机开始下降,当无人机完成降落后,螺旋桨停止转动。
若无人机需要进行紧急降落,固定旋翼开始降低转速,倾转旋翼所匹配的伺服电机控制齿轮组的转动,使得倾转轴驱动齿轮带动的整体旋转一定角度,使倾转旋翼提供向上的推力,从而实现无人机的紧急降落。
本设计通过固定翼、倾转旋翼的混合工作,既保留了普通旋翼无人机可以实现垂直起降及空中悬停的优势,又解决了普通旋翼无人机无法水平转向、飞行轨迹不易精确控制、无法高速前行的问题。通过伺服电机对倾转旋翼倾转方向的控制,可以让本发明获得对于各种起飞环境的较高适应能力,同时由于本发明可以精确控制在空中的飞行轨迹及飞行姿态,故本发明可以完成各种较复杂环境中的精确作业。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明创造,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种倾转翼、固定翼混合型无人机
- 一种能够垂直起降倾转四旋翼的固定翼无人机