一种油气田人员、车辆定位关联视频监控方法
文献发布时间:2023-06-19 11:49:09
技术领域
本申请属于监控领域,尤其涉及一种油气田人员、车辆定位关联视频监控方法。
背景技术
监控系统是安防系统中应用最多的系统之一,现有监控系统多是用于监控一定范围内的区域,对于一些面积大、空旷的地区很难做到有效监控,尤其在油田地区,安防多处于室外、人烟稀少的地方。在空旷面积较大的地区很难对人员和车辆准确监控定位,当空旷面积较大的区域出现不发分子时,很难对执法和工作人员进行有效的定位和行为跟踪,尤其在追捕犯罪嫌疑人过程中,很难保护工作人员的人身安全、国家资源的财产安全,并且在抓捕的过程中无法远程跟踪目标,使得抓捕过程存在一定的难度,让犯罪嫌疑人逃跑几率大幅度增加。
发明内容
为解决现有技术中存在的在面积大、空旷的地区很难有效监控的技术问题,本发明提供了一种油气田人员、车辆定位关联视频监控方法,弥补了现有技术的不足。
一种油气田人员、车辆定位关联视频监控方法,包括以下步骤:
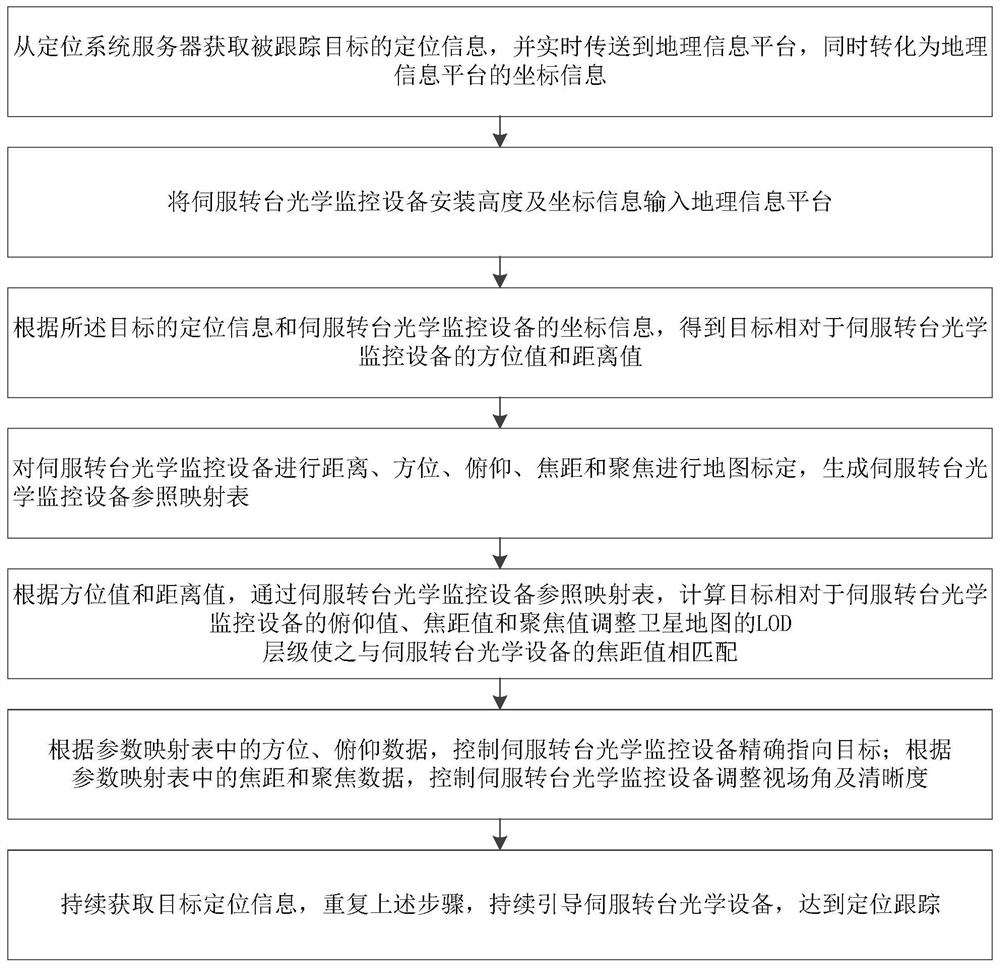
步骤a、从定位系统服务器获取被跟踪目标的定位信息,并实时传送到地理信息平台,同时转化为地理信息平台的坐标信息;
步骤b、将伺服转台光学监控设备安装高度及坐标信息输入地理信息平台;
步骤c、根据所述目标的定位信息和伺服转台光学监控设备的坐标信息,得到目标相对于伺服转台光学监控设备的方位值和距离值;
步骤d、对伺服转台光学监控设备进行距离、方位、俯仰、焦距和聚焦进行地图标定,生成伺服转台光学监控设备参照映射表;
步骤e、根据步骤c所述方位值和距离值,通过伺服转台光学监控设备参照映射表,计算目标相对于伺服转台光学监控设备的俯仰值、焦距值和聚焦值;
步骤f、根据步骤d所述参数映射表中的方位、俯仰数据,控制伺服转台光学监控设备精确指向目标;根据步骤e所述参数映射表中焦距和聚焦数据,控制伺服转台光学监控设备调整到适合的视场角及清晰度;
步骤g、持续获取目标定位信息,重复上述步骤,持续引导伺服转台光学设备,达到定位跟踪。
优选的,步骤c所述得到目标点相对于伺服转台光学监控设备的方位值和距离值方法具体是:在地图中输入伺服转台光学监控设备的安装高度及坐标信息并标记此点为O,再根据获取到的目标点的坐标信息,计算出两点间的长度,再计算出两点构成的线与正北方向的夹角。
优选的,步骤d所述伺服转台光学监控设备参照映射表包括参照映射表一和参照映射表二,参照映射表一反应伺服转台光学监控设备的距离、方位、俯仰信息;参照映射表二,反应伺服转台光学监控设备的焦距和聚焦信息。
优选的,步骤d所述对伺服转台光学监控设备进行方位的地图标定方法具体是:在地理信息平台上以伺服转台光学监控设备安装位置为中心,正北标记为方位0°,测试人员A利用手持GPS定位系统到伺服转台光学监控设备安装位置定点,记录安装位置O1,测试人员A移动到正北1km处站立,标定人员B在伺服转台光学监控设备成像画面上找到手持GPS测试人员A,并将该位置标定为0°。
优选的,步骤d所述对伺服转台光学监控设备进行俯、仰地图标定的方法具体是:在地图上以伺服转台光学监控设备安装位置为中心,0°为起始,每隔45°为一条标定线,在标定线上每隔1km设定一个标定点,测试人员A到达指定的标定点位置,在伺服转台光学监控设备画面上找到测试人员A的位置,使测试人员A处于画面的最中央位置,并记录此位置的伺服转台光学监控设备俯仰值,标定在该标定点上,以此类推,标定完所有标定点,则伺服转台光学监控设备的视角方位值、俯仰值、目标与伺服转台光学监控设备安装位置之间距离呈现对应关系。
优选的,步骤d所述对伺服转台光学监控设备进行焦距和聚焦地图标定的方法具体是:测试人员A利用手持GPS在伺服转台光学监控设备的安装位置标定一个坐标点,利用此点为目标移动到距离该点100米处站立,标定人员B转动伺服转台光学监控设备找到测试人员A,并使测试人员A处于监控画面的中央位置,通过调整焦距命令使测试人员A处固定好视场角大小;再通过调整聚焦命令,使测试人员A处达到清晰状态,记录此时的焦距值和聚焦值。
优选的,步骤d所述对伺服转台光学监控设备进行焦距和聚焦进行地图标定方法具体是:从100-4000米每隔100米纪录一个点的焦距值和聚焦值。
步骤d所述对伺服转台光学监控设备进行俯仰标定方法的可以对多台伺服转台光学监控设备进行联动。
本发明的有益效果如下:一种油气田人员、车辆定位关联视频监控方法,根据获取定位目标的坐标数据,得到该目标点距离伺服转台光学设备的距离、方位,并参照监控设备参照映射表,得到俯仰值、焦距和聚焦值,联动驱动电机使镜头转到目标点位置,完成引导,解决了在面积大、空旷的地区很难有效监控的技术问题,实现了目标定位与监控视频的联动。
附图说明
此处所说明的附图用来提供对本申请的进一步理解,构成本申请的一部分,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。在附图中:
图1为本发明实施例所述方法的流程图;
图2为本发明实施例所述方法的方位和距离的计算说明图。
具体实施方式
为了使本申请实施例中的技术方案及优点更加清楚明白,以下结合附图对本申请的示例性实施例进行进一步详细的说明,显然,所描述的实施例仅是本申请的一部分实施例,而不是所有实施例的穷举。需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。
实施例1、参照图1至图2,说明本实施例,本实施例的一种油气田人员、车辆定位关联视频监控方法:包括以下步骤:
步骤a、从定位系统服务器获取被跟踪目标的定位信息,并实时传送到地理信息平台,同时转化为地理信息平台的坐标信息;
具体的,利用坐标系转换方法,将从定位服务器获取到的目标点坐标转换为和地图服务器相同的坐标系。
步骤b、将伺服转台光学监控设备安装高度及坐标信息输入地理信息平台;
步骤c、根据所述目标的定位信息和伺服转台光学监控设备的坐标信息,得到目标相对于伺服转台光学监控设备的方位值和距离值;
具体的,在地图服务器中输入伺服转台光学监控设备的安装高度及坐标信息并标记此点为O,设置设备安装位置为坐标系的O(x1,y1)点,再根据获取到的目标点A(x2,y2)的坐标信息,利用三角函数计算出两点间的长度L=√(x2-x1)2+(y2-y1)2,即距离。再计算出两点构成的线与正北方向的夹角α,tanα=(x2-x1)/(y2-y1),即相对伺服转台光学监控设备的目标点方位值。
步骤d、对伺服转台光学监控设备进行距离、方位、俯仰、焦距和聚焦进行地图标定,生成伺服转台光学监控设备参照映射表;伺服转台光学监控设备参照映射表包括参照映射表一和参照映射表二,参照映射表一反应伺服转台光学监控设备的距离、方位、俯仰信息;参照映射表二,反应伺服转台光学监控设备的焦距和聚焦信息。具体参照,表1参照映射表一和表2参照映射表二。
具体的,对伺服转台光学监控设备进行方位标定的方法,在地理信息系统上以伺服转台光学监控设备安装位置为中心,正北标记为方位0°,测试人员A利用手持GPS定位系统到伺服转台光学监控设备安装位置定点,记录安装位置O1,测试人员A移动到正北1km处站立,标定人员B在伺服转台光学监控设备成像画面上找到手持GPS测试人员A,并将该位置标定为0°;本实施例中所述的伺服转台光学监控设备的型号是ARD-PRT-2。
具体的,对伺服转台光学监控设备进行俯仰标定的方法,包括在地图上以伺服转台光学监控设备安装位置为中心,0°为起始,每隔45°为一条标定线,在标定线上每隔1km设定一个标定点,测试人员A到达指定的标定点位置,在伺服转台光学监控设备画面上找到测试人员A的位置,使测试人员A处于画面的最中央位置,并记录此位置的伺服转台光学监控设备俯仰值,标定在该标定点上,以此类推,标定完所有标定点,则伺服转台光学监控设备的视角方位值、俯仰值、目标与伺服转台光学监控设备安装位置之间距离呈现对应关系。重复此步骤可以完成其他需要联动的伺服转台光学监控设备。
对伺服转台光学监控设备进行焦距和聚焦标定的方法,包括测试人员A利用手持GPS在伺服转台光学监控设备的安装位置标定一个坐标点,利用此点为目标移动到距离该点100米处站立,标定人员B转动伺服转台光学监控设备找到测试人员A,并使测试人员A处于监控画面的中央位置,通过调整焦距命令使测试人员A处达到合适的大小,也就是固定好视场角大小;再通过调整聚焦命令,使测试人员A处达到最清晰状态,记录此时的焦距值和聚焦值;从100-4000米每隔100米纪录一个点的焦距值和聚焦值。
表1参照映射表一
表2参照映射表二
步骤e、根据步骤c所述方位值和距离值,通过伺服转台光学监控设备参照映射表,计算目标相对于伺服转台光学监控设备的俯仰值、焦距值和聚焦值;
步骤f、根据步骤d所述参数映射表一中的方位、俯仰数据,控制伺服转台光学监控设备精确指向目标;根据步骤e所述参数映射表二中的焦距和聚焦数据,控制伺服转台光学监控设备调整适合的视场角及清晰度;
步骤g、持续获取目标定位信息,重复上述步骤,持续引导伺服转台光学设备,达到定位跟踪。
显然,本领域的技术人员可以对本申请进行各种改动和变型而不脱离本申请的精神和范围。这样,倘若本申请的这些修改和变型属于本申请权利要求及其等同技术的范围之内,则本申请也意图包含这些改动和变型在内。
- 一种油气田人员、车辆定位关联视频监控方法
- 一种保护人员隐私的视频监控方法和系统