动力组件,机臂组件,机臂连接件及无人机
文献发布时间:2023-06-19 11:54:11
技术领域
本申请涉及无人机领域,具体而言,涉及一种动力组件,机臂组件,机臂连接件及无人机。
背景技术
近年来,无人机因其便利性而被广泛地应用于诸如航拍、农业、植保、自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等领域。然而,目前无人机的螺旋桨通常呈固定的展开状态,使得无人机不便于收纳放置。
发明内容
本申请实施例的目的在于提供一种动力组件,机臂组件,机臂连接件及无人机,用以改善目前无人机不便于收纳放置的问题。
本申请第一方面提供一种动力组件,包括螺旋桨驱动装置;与所述螺旋桨驱动装置连接的螺旋桨;以及设置在所述螺旋桨驱动装置与所述螺旋桨的连接处的桨叶托盘,所述桨叶托盘可沿其轴向来回移动,以允许所述螺旋桨收拢和/或展开,所述螺旋桨驱动装置用于在所述桨叶托盘移动至允许所述螺旋桨展开时驱动所述螺旋桨旋转。
本申请提供的动力组件通过桨叶托盘沿其轴向的来回移动能够使得螺旋桨在使用时展开,而在不使用时收拢,从而方便动力组件的收纳放置,进而改善具有该动力组件的无人机的收纳放置问题。
在本申请第一方面的第一种实施方式中,所述螺旋桨包括桨毂及桨叶,所述螺旋桨驱动装置与所述桨毂连接,用于驱动所述桨毂转动,所述桨叶与所述桨毂可转动地连接,所述桨毂的转动方向与所述桨叶在展开过程中或收拢过程中相对所述桨毂的转动方向相互垂直。
基于本申请第一方面的第一种实施方式,在本申请第一方面的第二种实施方式中,所述螺旋桨驱动装置的外壳包括上盖体,所述上盖体包括本体及自所述本体凸设的圆柱部,所述圆柱部沿其轴向开设有通孔,所述螺旋桨驱动装置包括与所述桨毂固定连接的第一转轴,所述第一转轴自所述通孔穿设。
基于本申请第一方面的第二种实施方式,在本申请第一方面的第三种实施方式中,所述动力组件还包括托盘驱动装置,所述托盘驱动装置与所述桨叶托盘连接,用于驱动所述桨叶托盘以使所述桨叶托盘来回移动。
基于本申请第一方面的第三种实施方式,在本申请第一方面的第四种实施方式中,所述桨叶托盘沿其轴向开设螺纹孔,所述螺纹孔包括孔壁,所述孔壁设置有内螺纹,所述圆柱部的外侧壁设置有与所述内螺纹配合的外螺纹,所述桨叶托盘在所述托盘驱动装置的驱动下正向旋转或反向旋转时,通过所述内螺纹与所述外螺纹的配合实现来回移动。
基于本申请第一方面的第三种实施方式,在本申请第一方面的第五种实施方式中,所述托盘驱动装置与所述桨叶托盘通过齿轮结构连接。
基于本申请第一方面的第三种实施方式,在本申请第一方面的第六种实施方式中,所述托盘驱动装置与所述桨叶托盘通过传送带连接。
基于本申请第一方面的第四种实施方式,在本申请第一方面的第七种实施方式中,所述桨叶托盘沿其轴向还开设有收容孔,所述收容孔与所述螺纹孔同轴设置,且所述收容孔的孔径大于所述螺纹孔的孔径,所述收容孔用于在所述螺旋桨收拢时,收容所述桨毂及所述桨叶与所述桨毂连接的端部。
基于本申请第一方面的第七种实施方式,在本申请第一方面的第八种实施方式中,所述桨叶包括柄部及与所述柄部固定连接的叶片,所述柄部与所述桨毂铰接,所述螺旋桨收拢时,所述柄部收容在所述收容孔中,且所述柄部远离所述叶片的一端抵靠所述收容孔的底壁。
在本申请第一方面的第九种实施方式中,所述螺旋桨驱动装置驱动所述螺旋桨沿所述桨叶托盘的径向旋转时,所述螺旋桨通过旋转产生的离心力展开。
基于本申请第一方面的第一种实施方式,在本申请第一方面的第十种实施方式中,所述动力组件还包括连接在所述桨毂与桨叶之间的弹性件,所述弹性件用于使所述螺旋桨收拢,和/或使所述螺旋桨展开。
基于本申请第一方面的第十种实施方式,在本申请第一方面的第十一种实施方式中,所述弹性件蓄存有使所述螺旋桨收拢的弹力,在所述螺旋桨驱动装置驱动所述螺旋桨转动时,旋转产生的离心力与所述弹力的合力使所述螺旋桨处于展开状态,在所述螺旋桨驱动装置停止驱动所述螺旋桨转动时,所述离心力消失,所述弹力驱使所述螺旋桨收拢。
基于本申请第一方面的第十种实施方式,在本申请第一方面的第十二种实施方式中,所述弹性件蓄存有使所述螺旋桨展开的弹力,在所述桨叶托盘移动至允许所述螺旋桨展开的过程中,所述弹力驱使所述螺旋桨展开,在所述桨叶托盘移动至使所述螺旋桨收拢的过程中,所述桨叶托盘抑制所述弹力。
在本申请第一方面的第十三种实施方式中,所述动力组件还包括与所述螺旋桨驱动装置连接的冷却装置,用于对所述螺旋桨驱动装置进行冷却处理。
本申请第二方面提供一种机臂组件,包括机臂及前述动力组件,所述动力组件可转动连接在所述机臂的一端,所述机臂组件还包括与所述机臂连接的旋转驱动装置,用于驱动所述动力组件趋向与所述机臂平行地旋转折叠或趋向与所述机臂垂直的旋转展开。
在本申请第二方面的第一种实施方式中,所述机臂组件还包括支架,所述支架与所述机臂的一端固定连接,所述动力组件通过所述支架可转动地连接在所述机臂的一端。
基于本申请第二方面的第一种实施方式,在本申请第二方面的第二种实施方式中,所述支架包括连接部及自所述连接部朝同一方向延伸且平行设置的第一悬臂及第二悬臂,所述连接部与所述机臂固定连接,所述第一悬臂及所述第二悬臂远离所述连接部的端部分别开设有第一轴孔及第二轴孔,所述第一轴孔与所述第二轴孔共轴设置,所述螺旋桨驱动装置的外周面设置有分别穿设在所述第一轴孔及第二轴孔中的第一凸轴及第二凸轴,所述第一凸轴及第二凸轴共轴且自所述螺旋桨驱动装置的外周面朝相反的方向凸设。
基于本申请第二方面的第二种实施方式,在本申请第二方面的第三种实施方式中,所述机臂组件还包括固定架,所述旋转驱动装置与所述固定架固定连接,所述动力组件与所述固定架可转动连接,所述旋转驱动装置通过所述固定架带动所述动力组件相对于所述支架转动。
基于本申请第二方面的第三种实施方式,在本申请第二方面的第四种实施方式中,所述固定架包括固接部及自所述固接部朝同一方向延伸且平行设置的第三悬臂及第四悬臂,所述固接部与所述旋转驱动装置固定连接,所述第三悬臂及所述第四悬臂远离所述固接部的端部分别具有第三轴孔及第四轴孔,所述第三轴孔与所述第四轴孔共轴设置,所述螺旋桨驱动装置的外周面还设置有分别穿设在所述第三轴孔及第四轴孔中的第三凸轴及第四凸轴,所述第三凸轴及第四凸轴共轴且自所述螺旋桨驱动装置的外周面朝相反的方向凸设。
基于本申请第二方面的第四种实施方式,在本申请第二方面的第五种实施方式中,所述螺旋桨驱动装置的外周面在临近所述第三凸轴及第四凸轴的位置分别凸设有一限位凸块,所述限位凸块包括相互垂直的第一限位面及第二限位面,所述第一限位面用于在所述旋转驱动装置驱动所述动力组件旋转折叠时,分别与所述第三悬臂及第四悬臂抵靠,以限制所述动力组件继续转动,所述第二限位面用于在所述旋转驱动装置驱动所述动力组件旋转展开时,分别与所述第一悬臂及第二悬臂抵靠,以限制所述动力组件继续转动。
基于本申请第二方面的第三种实施方式,在本申请第二方面的第六种实施方式中,所述旋转驱动装置为液压推杆,气压推杆或电动推杆。
在本申请第二方面的第七种实施方式中,所述机臂组件还包括起落架,所述起落架与所述螺旋桨驱动装置固定连接,所述起落架与所述螺旋桨分别位于所述螺旋桨驱动装置的相背两侧,且相对于收拢后的所述螺旋桨朝向相反的方向延伸,所述起落架在所述旋转驱动装置驱动所述动力组件旋转折叠或旋转展开时一并旋转折叠或展开。
本申请提供的机臂组件,通过旋转驱动装置驱动动力组件趋向于与机臂平行的旋转折叠或趋向于与机臂垂直的旋转展开,能够方便机臂组件的收纳,进一步改善具有该机臂组件的无人机的收纳放置问题。
本申请第三方面提供一种机臂连接件,用于将机臂组件连接至无人机,包括机身固接件及可转动连接在机身固接件相对两端的第一机臂固接件及第二机臂固接件,所述机身固接件与所述无人机的机身固定连接,所述第一机臂固接件及所述第二机臂固接件分别与一个所述机臂组件的机臂固定连接。
在本申请第三方面的第一种实施方式中,所述机臂组件为前述的机臂组件。
在本申请第三方面的第二种实施方式中,所述机臂连接件还包括第一连接轴及第二连接轴,所述第一连接轴及第二连接轴分别固定连接在所述机身固接件的相对两端,所述第一机臂固接件与所述机身固接件通过第一连接轴可转动地连接,所述第二机臂固接件与所述机身固接件通过所述第二连接轴可转动地连接。
基于本申请第三方面的第二种实施方式,在本申请第三方面的第三种实施方式中,所述机身固接件包括平行设置的上压板及下压板,所述上压板及下压板分别与所述无人机的机身固定连接。
基于本申请第三方面的第二种实施方式,在本申请第三方面的第四种实施方式中,所述机臂连接件还包括机臂驱动装置,以及连接在所述机臂驱动装置与所述第一机臂固接件及所述第二机臂固接件之间的传动组件,所述机臂驱动装置驱动所述传动组件带动所述第一机臂固接件及所述第二机臂固接件旋转,进而带动所述机臂实现展开或折叠。
基于本申请第三方面的第四种实施方式,在本申请第三方面的第五种实施方式中,所述传动组件为丝杆传动组件。
基于本申请第三方面的第五种实施方式,在本申请第三方面的第六种实施方式中,所述传动组件包括丝杆及滑动板,所述滑动板的相对两端与所述第一机臂固接件及第二机臂固接件连接,所述滑动板中部开设有螺纹孔,所述丝杆与所述螺纹孔螺纹配合,所述机臂驱动装置能够驱动所述丝杆转动。
基于本申请第三方面的第六种实施方式,在本申请第三方面的第七种实施方式中,所述传动组件还包括第一行程支架及第二行程支架,所述第一行程支架及第二行程支架分别固定连接在所述机身固接件的相对两侧,所述丝杆包括连接端,所述丝杆从所述第一行程支架穿设至所述第二行程支架,所述连接端自所述第二行程支架与所述第一行程支架的相背侧穿出,所述机臂驱动装置通过所述连接端驱动所述丝杆转动,所述滑动板位于所述第一行程支架及所述第二行程支架之间,所述第一行程支架及所述第二行程支架用于限定所述滑动板的滑动范围。
基于本申请第三方面的第七种实施方式,在本申请第三方面的第八种实施方式中,所述传动组件还包括第一齿轮及与所述第一齿轮啮合的第二齿轮,所述机臂驱动装置与所述第一齿轮连接,用于驱动所述第一齿轮转动,所述第二齿轮与所述连接端固定连接。
基于本申请第三方面的第七种实施方式,在本申请第三方面的第九种实施方式中,所述机臂驱动装置直接与所述连接端连接。
基于本申请第三方面的第七种实施方式,在本申请第三方面的第十种实施方式中,所述传动组件还包括设置在所述第一行程支架及所述第二行程支架之间的第一滑杆及第二滑杆,所述第一滑杆及所述第二滑杆的相对两端均分别于所述第一行程支架及第二行程支架固定连接,所述滑动板还开设有第一滑孔及第二滑孔,所述第一滑杆及第二滑杆分别自所述第一滑孔及第二滑孔穿设。
基于本申请第三方面的第六种实施方式,在本申请第三方面的第十一种实施方式中,所述滑动板的相对两端与所述第一机臂固接件及第二机臂固接件滑动连接或齿轮连接。
基于本申请第三方面的第四种实施方式,在本申请第三方面的第十二种实施方式中,所述传动组件为拨轮传动组件。
基于本申请第三方面的第十二种实施方式,在本申请第三方面的第十三种实施方式中,所述传动组件包括拨轮,自所述拨轮外缘凸设的拨杆,及与所述机臂固接件固定连接且与所述拨轮配合的槽轮,自所述槽轮外缘向所述槽轮内部沿所述槽轮的径向开设有与所述拨杆配合的槽道,所述机臂驱动装置驱动所述拨轮转动,所述拨轮通过所述拨杆与所述槽道的配合带动所述槽轮转动,进而带动所述机臂固接件转动。
基于本申请第三方面的第十三种实施方式,在本申请第三方面的第十四种实施方式中,所述机臂驱动装置与所述拨轮通过齿轮结构连接或者通过带轮结构连接。
本申请第四方面提供一种无人机,包括机身,前述机臂连接件及前述机臂组件,所述机臂连接件将所述机臂组件连接至所述机身。
本申请的一个或多个实施例的细节在下面的附图和描述中提出。本申请的其它特征、目的和优点将从说明书、附图以及权利要求书变得明显。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
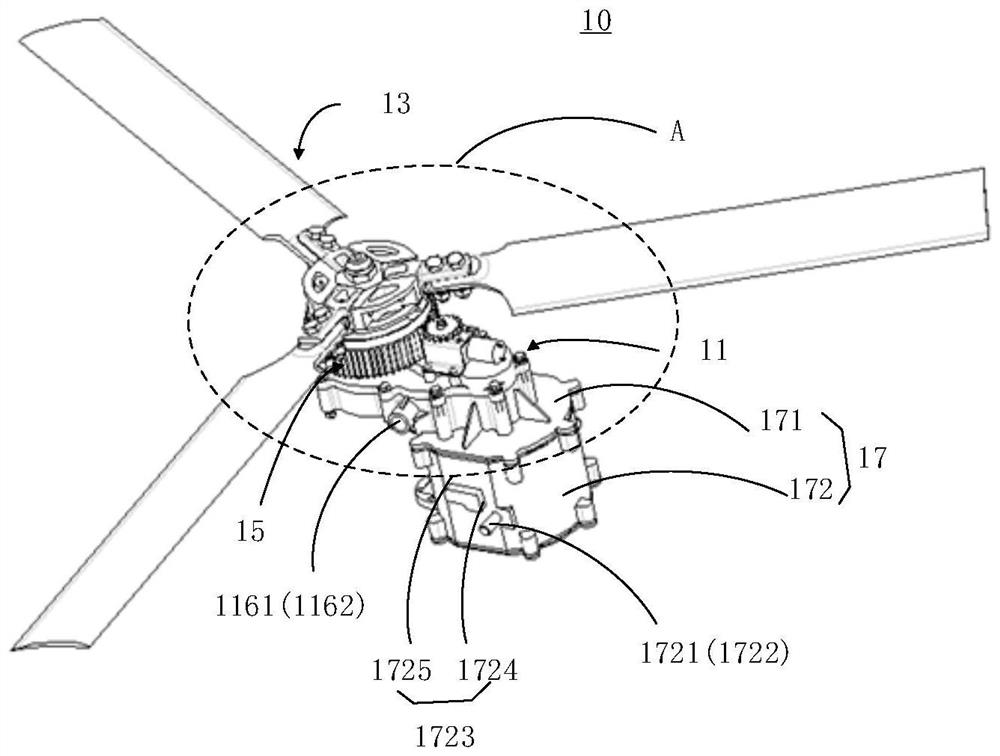
图1为本申请一实施例提供的动力组件的立体图。
图2为图1的A区域的放大图。
图3为图1的螺旋桨驱动装置的上盖体的结构示意图。
图4为图1中的桨毂的立体图。
图5为图1中的桨叶的立体图。
图6为图1中的桨叶托盘的立体图。
图7为本申请一实施例提供的弹性件在自然状态下的结构示意图。
图8为图7的弹性件在拉伸状态下的结构示意图。
图9为图7的弹性件在螺旋桨内处于拉伸状态的结构示意图。
图10为图7的弹性件在螺旋桨内处于自然状态的结构示意图。
图11为本申请另一实施例提供的弹性件在自然状态下的结构示意图。
图12为图11的弹性件在压缩状态下的结构示意图。
图13为图11的弹性件在螺旋桨内处于拉伸状态的结构示意图。
图14为图11的弹性件在螺旋桨内处于自然状态的结构示意图。
图15为本申请一实施例提供的一种机臂组件的展开状态的结构示意图。
图16为本申请一实施例提供的一种机臂组件的折叠状态的结构示意图。
图17为本申请实施例提供的支架的结构示意图。
图18为本申请一实施例提供的固定架的结构示意图。
图19为本申请一实施例提供的起落架的结构示意图。
图20为本申请一实施例提供的与机臂组件连接的机臂连接件的结构示意图。
图21为本申请一实施例提供的折叠状态下的机臂连接件的结构示意图。
图22为本申请一实施例提供的展开状态下的拆除上压板的机臂连接件的结构示意图。
图23为本申请一实施例提供的机臂连接件的爆炸图。
图24为本申请另一实施例提供的折叠状态下连接有机臂组件且拆除上压板的机臂连接件的俯视图。
图25为本申请另一实施例提供的展开状态下连接有机臂组件且拆除上压板的机臂连接件的俯视图。
图26为本申请又一实施例提供的机臂连接件的结构示意图。
图27为图26的俯视图。
图28为沿图27中A-A线的机臂连接件的剖视图。
图29为图26中的机臂连接件的拨轮与槽轮的配合过程的示意图。
图30为又一实施例提供的机臂连接件的结构示意图。
图31为再一实施例提供的机臂连接件的结构示意图。
图32为图31中的机臂连接件的拨轮与槽轮的配合过程的示意图。
图33为本申请一实施例提供机臂组件呈展开状态的无人机的结构示意图。
图34为本申请一实施例提供的机臂组件处于收拢状态的无人机的侧视图。
图标:动力组件-10;螺旋桨驱动装置-11;螺旋桨-13;桨叶托盘-15;外壳-111;上盖体-112;本体-113;圆柱部-114;通孔-1141;第一转轴-115;下壳体-116;桨毂-131;桨叶-136;顶面-1311;底面-1312;外周面-1313;固接孔-132;凸肋-1321;桨叶连接槽-133;槽连接孔-1331;柄部-137;叶片-138;柄部连接孔-1371;第一延伸部-1372;第二延伸部-1373;收容空间-1374;通孔-151;孔壁-1511;收容孔-153;托盘驱动装置-14;固定件-141;驱动电机-142;驱动轴143;驱动齿轮-144;弹性件-16,16a;第一连接端-161,161a;缠绕部-162;第二连接端-163,163a;第一延伸杆-164;第二延伸杆-165;冷却装置-17;顶盖-171;底壳-172;机臂组件-20;机臂-21;支架-22;连接部-221;第一悬臂-222;第二悬臂223;连接孔-2211,3731,330,350;固接孔-2212;第一轴孔-2221;第二轴孔-2231;第一凸轴-1161;第二凸轴-1162;旋转驱动装置-23;套接件-24;连接部-241;固定架-25;固接部-251;第三悬臂-252;第四悬臂-253;第三轴孔2521;第四轴孔2531;第三凸轴-1721;第四凸轴-1722;限位凸块-1723;第一限位面-1724;第二限位面-1725;起落架-26;连接端-261,3711;自由端-262;滑轮-263;机臂连接件-30,30a,30b,30c;机身固接件-31,31a,31b,31c;第一机臂固接件-33,33a,33b,33c;第二机臂固接件-35,35a,35c;上压板-311,311a,311b,311c;下压板-313,313a,313b,313c;轴接孔-3111,3111a,3111c,3131,3131a;固定板-3113,3133;第一连接轴-32,32a,32c;第二连接轴-34,34a,34c;机臂驱动装置-36,36a,36b,36c;传动组件-37,37a,37b,37c;驱动转轴-361;丝杆-371;滑动板-372;螺纹孔-3721;第一滑槽-3722;第二滑槽-3723;第一滑孔-3724;第二滑孔-3725;第一行程支架-373;第二行程支架-374;第一穿孔-3741;第二穿孔-3742;第一齿轮-375;第二齿轮-376;第一滑杆-377;第二滑杆-378;固接孔-3732,3733,3743,3744;第一轴承-3791;第二轴承-3792;卡簧-370;卡接部-3712,3611;机臂固接端331,351;滑动连接端-333,353;机臂连接孔-3311,3511;第一延伸臂-3331,3531;第二延伸臂-3333,3533;轴孔-3332,3334,3811,3532,3534,3821;第一滑块-381;第二滑块-382;第一齿条-3726;第二齿条-3727;第一齿接部-334;第二齿接部-354;无人机-100;连接部-1011;连接孔-1012;第一连接孔-3113a,3113c;凸起部-3112a;第三连接孔3133a;端盖315a,315b;电机-361a,361c;第一传动轮-363a,363c;电机安装座-362a,362c;安装平台-3621a,3621c;第一侧板-3622a,3622c;第一凸耳-3624a,3624c;拨轮-371a,371b,371c;第二传动轮-373a,373c;拨轮轴-375a,375b,375c;本体-3711a,3711b,3711c;拨杆-3713a,3713b,3713c;槽道-331a,351a,331b,331c,351c;弧形部-333a,353a,333b,333c,353c;安装板-312b;第一安装部-3131b;第二安装部-3133b;连接部-3132b;第二连接孔3115c;凸块-3132c;辅助支撑件-315c;第二侧板-3623c;第二凸耳-3625c;第一调节槽-3626c;第一抵靠板-3628c。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
请一并参阅图1及图2,本申请一实施例提供一种动力组件10,为无人机提供飞行动力。动力组件10包括螺旋桨驱动装置11,与螺旋桨驱动装置11连接的螺旋桨13,以及设置在螺旋桨驱动装置11与螺旋桨13的连接处的桨叶托盘15。桨叶托盘15可沿其轴向来回移动,以允许螺旋桨13收拢和/或展开。螺旋桨驱动装置11用于在桨叶托盘15移动至允许螺旋桨13展开后驱动螺旋桨13旋转,从而为无人机提供飞行动力。
本实施例中,螺旋桨驱动装置11可以是电机。
请一并参阅图2及图3,螺旋桨驱动装置11包括外壳111。外壳111包括上盖体112及下壳体116。上盖体112和下壳体116围合成收容空间,用于收容螺旋桨驱动装置所包括的驱动机构。图示实施例中,上盖体112包括本体113及自本体113凸设的圆柱部114。可选地,本体113可以包括台阶部1131。台阶部1131大致呈长条状。圆柱部114自台阶部1131的一端凸设。圆柱部114沿其轴向开设有通孔1141。通孔1141贯穿本体113。本实施例中,螺旋桨驱动装置11还包括第一转轴115。第一转轴115自通孔1141穿设,且与螺旋桨13固定连接。图示实施例中,圆柱部114外侧壁设置有外螺纹,用于与桨叶托盘15配合,实现桨叶托盘15沿其轴向的来回移动。
请一并参阅图2,图3及图4,螺旋桨13设置在上盖体112上,并与螺旋桨驱动装置11连接。螺旋桨13包括桨毂131及与桨毂131连接的桨叶136。螺旋桨驱动装置11与桨毂131连接,用于驱动桨毂131转动。本实施例中,第一转轴115与桨毂131固定连接,用于驱动桨毂131转动。桨毂131的转动方向与桨叶136在展开过程中或收拢过程中相对桨毂131的转动方向相互垂直。
本实施例中,桨毂131大致呈圆盘状。桨毂131包括顶面1311,与顶面1311平行的底面1312,及连接在顶面1311与底面1312之间的外周面1313。桨毂131的中心设置有固接孔132。固接孔132贯穿顶面1311及底面1312。固接孔132的孔壁间隔设置有沿桨毂131的轴向延伸的凸肋1321。相应地,第一转轴115的外周面设置有凸肋1321的互补结构,通过凸肋1321与互补结构的配合使得桨毂131与第一转轴115固定连接,从而实现通过第一转轴115的转动带动桨毂131转动,进而带动螺旋桨13转动。
可以理解,第一转轴115与桨毂131之间的固接并不限于通过在桨毂131上开设固接孔132且在固接孔132的孔壁设置凸肋1321,以及在第一转轴115的外周面设置与凸肋1321的互补结构这一种方式,只要能够实现第一转轴115与桨毂131之间的固定连接即可,例如,还可以通过焊接等方式实现第一转轴115与桨毂131的固接。
桨毂131还开设有桨叶连接槽133。本实施例中,自桨毂131的外周面向桨毂131内部等角距地设置有多个径向延伸的桨叶连接槽133。桨叶连接槽133贯穿桨毂131的顶面1311,底面1312及外周面1313,以方便桨叶136的收拢与展开。为减轻桨毂131的重量,桨毂131位于两相邻的桨叶连接槽133之间的部分可设置成镂空状。为方便桨毂131与桨叶136的连接,每个桨叶连接槽133的侧槽壁开设有槽连接孔1331。本实施例中,桨叶连接槽133的数量为三个。可选地,桨叶连接槽133的底壁上可设置有挂接部(图未示),用于在动力组件10包括连接在桨毂131与桨叶136之间的弹性件时,供弹性件的一端挂靠。
桨叶136的数量与桨叶连接槽133的数量对应。
请一并参阅图2,图4及图5,桨叶136包括柄部137及与柄部137固定连接的叶片138。
柄部137设置在桨叶连接槽133内,且与桨叶连接槽133的槽壁通过连接轴连接,使得柄部137与桨毂131铰接且桨叶136可绕连接轴转动。本实施例中,柄部137设置有与槽连接孔1331对应的柄部连接孔1371,通过在槽连接孔1331及柄部连接孔1371中穿设连接轴,使得柄部137与桨毂131铰接。可以理解,叶片138与柄部137可以一体成型,或者,叶片138与柄部137通过螺钉与螺孔的配合连接。
本实施例中,柄部137包括沿远离叶片138的方向延伸且相对设置的第一延伸部1372及第二延伸部1373。第一延伸部1372及第二延伸部1373上分别开设有柄部连接孔1371。第一延伸部1372的柄部连接孔1371与第二延伸部1373的柄部连接孔1371共轴设置。第一延伸部1372及第二延伸部1373之间形成收容空间1374。可选地,柄部137还可以开设有插接槽(图未示),用于在动力组件10包括连接在桨叶136与桨毂131之间的弹性件时,供弹性件的另一端插入。具体地,插接槽可以自收容空间1374的底壁向柄部137内开设。
请一并参阅图1,图2及图6,桨叶托盘15设置在螺旋桨驱动装置11与螺旋桨13的连接处。
本实施例中,桨叶托盘15套设在圆柱部114上。桨叶托盘15沿其轴向开设通孔151。通孔151包括孔壁1511。孔壁1511设置有与圆柱部114的外侧壁的外螺纹配合的内螺纹。本实施例中,桨叶托盘15沿其轴向还开设有收容孔153。收容孔153与通孔151共轴设置,且收容孔153的孔径大于通孔151的孔径。收容孔153用于在螺旋桨13收拢时,收容桨毂131及桨叶136与桨毂131连接的端部(即,柄部137)。
本实施例中,当螺旋桨13收拢时,柄部137收容在收容孔153中,且柄部137远离叶片138的一端抵靠收容孔153的底壁,这样可以增大螺旋桨13收拢时桨叶136的稳定性,避免桨叶136晃动。
本实施例中,动力组件10还包括托盘驱动装置14。托盘驱动装置14设置在上盖体112上,与桨叶托盘15并行设置。图2所示实施例中,托盘驱动装置14设置在台阶部1131上,且位于台阶部1131的相对于圆柱部114所在端部的另一端。托盘驱动装置14与桨叶托盘15连接,用于驱动桨叶托盘15以使桨叶托盘15来回移动。
本实施例中,托盘驱动装置14与桨叶托盘15通过齿轮结构连接。托盘驱动装置14包括固定件141,驱动电机142,驱动轴143,驱动齿轮144。固定件141用于将托盘驱动装置14固定在上盖体112上。驱动电机142与驱动轴143连接,用于驱动该驱动轴143转动。驱动齿轮144与驱动轴143固定连接,驱动轴143的转动带动该驱动齿轮144转动。本实施例中,桨叶托盘15的外周面设置有与驱动齿轮144啮合的齿状结构,驱动齿轮144的转动带动桨叶托盘15转动。本实施例中,桨叶托盘15在托盘驱动装置14的驱动下正向旋转或反向旋转时,通过内螺纹与外螺纹的配合实现来回移动。
可以理解,其他实施例中,托盘驱动装置14与桨叶托盘15可以通过传送带连接。此时,托盘驱动装置14的驱动齿轮144可以替换为与驱动轴143固定连接的主动轮,桨叶托盘15的外周面的齿状结构可省略,桨叶托盘15作为从动轮,由主动轮经传送带带动实现正向或反向旋转。当然,托盘驱动装置14与桨叶托盘15连接方式还可以为链传动连接等,或者齿轮结构连接、传送带连接、链传动连接等一种或多种传动方式的组合。
可以理解,其他实施例中,托盘驱动装置14可以设置为与桨叶托盘15固定连接的升降机构,此时,通孔151的孔壁的内螺纹,圆柱部114的外周面的外螺纹及桨叶托盘15的外周面的齿状结构均可省略,直接通过升降机构实现桨叶托盘15的来回移动。
本实施例中,当托盘驱动装置14将桨叶托盘15移动至允许螺旋桨13展开时,螺旋桨13可能因为惯性原因保持收拢的状态。此种情况下,当螺旋桨驱动装置11驱动螺旋桨13沿桨叶托盘15的径向旋转时,螺旋桨13通过旋转产生的离心力展开。
可以理解,请一并参阅图7至图10,一实施例中,动力组件10还可以包括连接在桨毂131与桨叶136之间的弹性件16。该弹性件16用于使螺旋桨13收拢,和/或使螺旋桨13展开(即,使螺旋桨13的桨叶136处于收拢状态或展开状态)。弹性件16可以例如为扭簧,拉簧等。本实施例中,弹性件16为扭簧。
一实施例中,弹性件16蓄存有使螺旋桨13收拢的弹力(即,弹性件16能够使桨叶136保持收拢状态)。当托盘驱动装置14将桨叶托盘15移动至允许螺旋桨13展开时,螺旋桨13由于弹性件16的作用保持收拢的状态。此种情况下,当螺旋桨驱动装置11驱动螺旋桨13转动时,旋转产生的离心力随着旋转转速的增大逐渐增大。当离心力增大到大于等于弹性件16的弹力时,旋转产生的离心力与弹性件16的弹力的合力使螺旋桨13处于展开状态。当螺旋桨驱动装置11停止驱动螺旋桨13转动时,离心力逐渐消失,弹性件16的弹力驱使螺旋桨13收拢。
弹性件16包括相对的第一连接端161及第二连接端163。第一连接端161与桨叶136(图示实施例中,与桨叶136的柄部137)连接。第二连接端163与桨毂131连接。在弹性件16的自然状态下,第一连接端161的延伸方向与第二连接端163的延伸方向所成夹角范围为85°~95°。弹性件16还可以包括连接在第一连接端161及第二连接端163之间的缠绕部162。
图示实施例中,弹性件16大致呈类环状结构。第一连接端161通过插入柄部137的插接槽,实现弹性件16与柄部137连接。缠绕部162绕设在连接桨叶136与桨毂131的连接轴(即,穿设在槽连接孔1331及柄部连接孔1371中的连接轴)上。第二连接端163通过挂靠设置在桨叶连接槽133底壁的挂接部,实现弹性件16与桨毂131的连接。可选地,弹性件16包括自第一连接端161向第二连接端163延伸且并行设置的第一延伸杆164及第二延伸杆165。第二延伸杆165与第一延伸杆164之间的间距自第二连接端163向第一连接端161逐渐减小。可选地,弹性件16相对于第一连接端161的中点与第二连接端163的中点的连线呈轴对称结构,由此可以提升弹性件16的稳定性。
可以理解,其他实施例中,也可以自桨叶连接槽133的底壁向桨毂131的内部开设插接槽供第二连接端163插设,而在收容空间底壁设置供第一连接端挂靠的挂接部,或者,分别自桨叶连接槽133的底壁向桨毂131的内部及自收容空间1374的底壁向柄部137的内部开设供第一连接端161及第二连接端163插设的插接槽,或者分别在桨叶连接槽133的底壁上及收容空间1374的底壁上设置供第一连接端161及第二连接端163挂靠的挂接部,弹性件16与桨叶136及桨毂131的连接并不限于上述实施例中描述的方式,只要能够实现弹性件16与桨叶136及桨毂131的连接即可。
请一并参阅图11至图14,另一实施例中,弹性件16a蓄存有使螺旋桨13展开的弹力(即,弹性件16能够使桨叶136保持展开状态)。本实施例所提供的弹性件16a的结构与前述实施例所提供的弹性件16的结构大致相同,其不同之处在于,在弹性件16a的自然状态下,第一连接端161a的延伸方向与第二连接端161a的延伸方向所成夹角范围为120°~130°。此种情况下,在托盘驱动装置14将桨叶托盘15移动至允许螺旋桨13收拢的过程中,螺旋桨13由于桨叶托盘15的限制(即,抑制弹性件16的弹力)逐渐达到收拢状态;在托盘驱动装置14将桨叶托盘15移动至允许螺旋桨13展开的过程中,桨叶托盘15对螺旋桨13的限制逐渐消失(即,释放弹性件16的弹力),弹性件16a所蓄存的使螺旋桨13展开的弹力驱使螺旋桨逐渐展开。
请再次参阅图1,本实施例中,动力组件10还包括与螺旋桨驱动装置11连接的冷却装置17,用于对螺旋桨驱动装置11进行冷却处理,避免螺旋桨驱动装置11工作时温度过高。该冷却装置17与螺旋桨驱动装置11的一端连接,且位于螺旋桨驱动装置11背离桨叶托盘15及托盘驱动装置14的一侧。图1及图2所示的实施例中,冷却装置17的外壳包括顶盖171及底壳172。顶盖171与底壳172围合成收容空间,用于收容冷却装置所包括的冷却机构。顶盖171与下壳体116的一端连接。可选地,顶盖171与下壳体116一体成型。
本申请提供的动力组件通过桨叶托盘沿其轴向的来回移动能够使得螺旋桨在使用时展开,而在不使用时收拢,从而方便动力组件的收纳放置,进而改善具有该动力组件的无人机的收纳放置问题。
请参阅图15及图16,本申请实施例还提供一种机臂组件20,包括机臂21及前述动力组件10。动力组件10可转动地连接在机臂21的一端。
机臂组件20还包括支架22。支架22与机臂21的一端固定连接。动力组件10通过支架22可转动地连接在机臂21的一端。可以理解,其他实施例中,支架22可以与机臂21一体成型。
请一并参阅图15至图17,本实施例中,支架22包括连接部221及自连接部221朝同一方向延伸且平行设置的第一悬臂222及第二悬臂223。连接部221,第一悬臂222及第二悬臂223形成类U形结构。
连接部221与机臂21固定连接。本实施例中,连接部221沿其轴向开设有连接孔2211,用于与机臂21连接。连接孔2211可以是通孔或自连接部221远离第一悬臂222及第二悬臂223的表面向连接部221内部沿其轴向开设的盲孔。可选地,连接部221的孔壁可开设有固接孔2212,机臂21上对应固接孔2212可设置有机臂固接孔,通过螺钉与固接孔2212及机臂固接孔的配合,以提升连接部221与机臂21之间的连接的稳固性。可选地,为减小机臂组件20的重量,连接部221的孔壁可设置成镂空状。
第一悬臂222及第二悬臂223远离连接部221的端部分别开设有第一轴孔2221及第二轴孔2231。第一轴孔2221与第二轴孔2231共轴设置。请再次参阅图1及图2,相应地,螺旋桨驱动装置11的外周面设置有分别穿设在第一轴孔2221及第二轴孔2231中的第一凸轴1161及第二凸轴1162。第一凸轴1161及第二凸轴1162共轴且自螺旋桨驱动装置11的外周面朝相反的方向凸设。本实施例中,第一凸轴1161及第二凸轴1162设置在下壳体116上,且位于下壳体116长度方向的中间靠近顶盖171的位置。第一凸轴1161及第二凸轴1162分别沿下壳体116的宽度方向朝相反的方向凸设。可以理解,其他实施例中,第一凸轴1161及第二凸轴1162也可以设置在螺旋桨驱动装置11的外周面的其他位置,例如,冷却装置17的底壳172上,本申请对此不做限定。本实施例中,为减小机臂组件20的重量,第一悬臂222及第二悬臂223也可以设置成镂空状。
机臂组件20还包括旋转驱动装置23,用于驱动动力组件10趋向与机臂21平行地旋转折叠或趋向与机臂21垂直的旋转展开。旋转驱动装置23可以为液压推杆,气压推杆或电动推杆等。旋转驱动装置23的一端连接至机臂21,另一端连接至动力组件10。
本实施例中,旋转驱动装置23通过套接件24连接至机臂21。套接件24套设在机臂21上。套接件24包括沿其径向凸设的连接部241。旋转驱动装置23的一端与连接部241连接。
请一并参阅图15,图16及图18,机臂组件20还可以包括固定架25。旋转驱动装置23与固定架25固定连接。动力组件10与固定架25可转动地连接。旋转驱动装置23的另一端通过固定架25连接至动力组件10。旋转驱动装置23通过移动固定架25带动动力组件10相对于支架22转动。可以理解,其他实施例中,旋转驱动装置23与固定架25可以一体成型。
本实施例中,固定架25包括固接部251及自固接部251朝同一方向延伸且平行设置的第三悬臂252及第四悬臂253。固接部251与旋转驱动装置23固定连接。第三悬臂252及第四悬臂253远离固接部251的端部分别具有第三轴孔2521及第四轴孔2531。第三轴孔2521与第四轴孔2531共轴设置。请再次参阅图1,图15及图16,螺旋桨驱动装置11的外周面还设置有分别穿设在第三轴孔2521及第四轴孔2531中的第三凸轴1721及第四凸轴1722。第三凸轴1721及第四凸轴1722共轴且自螺旋桨驱动装置11的外周面朝相反的方向凸设。本实施例中,第三凸轴1721及第四凸轴1722与第一凸轴1161及第二凸轴1162平行设置。可选地,螺旋桨驱动装置11的外周面在临近第三凸轴1721及第四凸轴1722的位置分别凸设有一限位凸块1723。限位凸块1723包括相互垂直的第一限位面1724及第二限位面1725。第一限位面1724用于在旋转驱动装置23驱动动力组件10旋转折叠后,分别与第三悬臂252及第四悬臂253抵靠,以限制动力组件10继续转动。第二限位面1725用于在旋转驱动装置23驱动动力组件10旋转展开后,分别与第一悬臂222及第二悬臂223抵靠,以限制动力组件10继续转动。可以理解,其他实施例中,也可以仅在临近第三凸轴1721或第四凸轴1722的位置设置一限位凸块1723,也能在旋转驱动装置23驱动动力组件10旋转折叠后或在旋转驱动装置23驱动动力组件10旋转展开后,限制动力组件10继续转动。图1,图13及图14所示的实施例中,第三凸轴1721,第四凸轴1722及限位凸块1723均设置在底壳172上。
请一并参阅图15,图16及图19,本实施例中,机臂组件20还包括起落架26。起落架26与螺旋桨驱动装置11固定连接。起落架26与螺旋桨13分别位于螺旋桨驱动装置11的相背两侧。且起落架26相对于收拢后的螺旋桨13朝向相反的方向延伸。起落架26在旋转驱动装置23驱动动力组件10旋转折叠或旋转展开时一并旋转折叠或展开。起落架26用于在无人机起飞或降落时保持无人机的稳定。
图15,图16及图19所示的实施例中,起落架26连接在底壳172远离顶盖171的一侧。起落架26包括连接端261及相对于连接端261的自由端262。起落架26还包括连接在自由端262的滑轮263。
本申请提供的机臂组件20,通过旋转驱动装置23驱动动力组件10趋向于与机臂21平行的旋转折叠或趋向于与机臂垂直的旋转展开,能够方便机臂组件20的收纳,进一步改善具有该机臂组件20的无人机的收纳放置问题。
请一并参阅图20至图23,本申请一实施例还提供一种机臂连接件30。机臂连接件30用于将机臂组件20连接至无人机的机身。
本实施例中,机臂连接件30包括机身固接件31及可转动地连接在机身固接件31相对两端的第一机臂固接件33及第二机臂固接件35。第一机臂固接件33及第二机臂固接件35分别与一个机臂组件20的机臂21固定连接。
机身固接件31与无人机的机身固定连接。本实施例中,机身固接件31包括平行且间隔设置的上压板311及下压板313。上压板311与下压板313分别与无人机的机身固定连接。
本实施例中,上压板311大致呈长条状,且具有中心对称结构。上压板311的相对两端开设有轴接孔3111。本实施例中,轴接孔3111沿上压板311的厚度方向设置。上压板311的中部向两侧分别延伸设置有固定板3113。固定板3113上开设有螺孔,用于与螺钉配合,以将上压板311固定连接至无人机的机身。下压板313与上压板311具有相同的结构,相应地,下压板313的相对两端开设有轴接孔3131,下压板313的中部向两侧分别延伸设置有固定板3133。固定板3133上开设有螺孔,用于与螺钉配合,以将下压板313固定连接无人机的机身。
本实施例中,机臂连接件30还包括第一连接轴32及第二连接轴34。第一连接轴32及第二连接轴34分别连接在机身固接件31的相对两端。第一机臂固接件33与机身固接件31通过第一连接轴32可转动地连接。第二机臂固接件35与机身固接件31通过第二连接轴34可转动地连接。图20至图22所示实施例中,第一连接轴32的两端分别与上压板311的轴接孔3111及下压板313的轴接孔3131连接。第二连接轴34的两端分别与上压板311的轴接孔3111及下压板313的轴接孔3131连接。
本实施例中,机臂连接件30还包括机臂驱动装置36,以及连接在机臂驱动装置36与第一机臂固接件33及所述第二机臂固接件35之间的传动组件37。机臂驱动装置36驱动传动组件37带动第一机臂固接件33及第二机臂固接件35同时沿相反的方向旋转,进而带动第一机臂固接件33及第二机臂固接件35连接的机臂组件20实现展开或折叠。本实施例中,机臂驱动装置36及传动组件37均设置在上压板311与下压板313之间。
本实施例中,机臂驱动装置36可以例如为电机,包括驱动转轴361。
本实施例中,传动组件37为丝杆传动组件。
传动组件37包括丝杆371及与丝杆371连接的滑动板372。滑动板372的相对两端与第一机臂固接件33及第二机臂固接件35滑动连接。
丝杆371包括连接端3711。连接端3711与机臂驱动装置36转动连接。机臂驱动装置36通过连接端3711驱动丝杆371转动。本实施例中,丝杆371为梯形丝杆,能够实现自锁定,能够避免第一机臂固接件33及第二机臂固接件35出现回转的情况。
具体地,滑动板372中部开设有螺纹孔3721。螺纹孔3721沿滑动板372的宽度方向开设。丝杆371与螺纹孔3721螺纹配合。机臂驱动装置36能够驱动丝杆371转动,进而带动滑动板372移动。本实施例中,滑动板372的相对两端还分别开设有第一滑槽3722及第二滑槽3723。第一滑槽3722及第二滑槽3723均沿滑动板372的长度方向延伸设置。本实施例中,滑动板372的相对两端与第一机臂固接件33及第二机臂固接件35通过第一滑槽3722及第二滑槽3723分别与连接在第一机臂固接件33及第二机臂固接件35上的滑块进行配合,从而实现滑动连接。本实施例中,滑动板372上还开设有供滑杆穿设的第一滑孔3724及第二滑孔3725。第一滑孔3724及第二滑孔3725均沿滑动板372的宽度方向开设,且分别位于螺纹孔3721的两侧。具体地,第一滑孔3724设置在螺纹孔3721与第一滑槽3722之间,第二滑孔3725设置在螺纹孔3721与第二滑槽3723之间。可选地,滑动板372的结构相对于螺纹孔3721所在轴线呈轴对称。
本实施例中,传动组件37还包括第一行程支架373及第二行程支架374。第一行程支架373及第二行程支架374平行设置且分别固定连接在所述机身固接件31的相对两侧。滑动板372位于第一行程支架373及第二行程支架374之间。第一行程支架373及第二行程支架374用于限定滑动板372的滑动范围。本实施例中,为使机臂连接件30的结构更为紧凑,机臂驱动装置36也位于第一行程支架373与第二行程支架374之间。本实施例中,丝杆371也位于第一行程支架373与第二行程支架374之间。具体地,丝杆371从第一行程支架373延伸至第二行程支架374。连接端3711自第二行程支架374与第一行程支架373的相背侧穿出。本实施例中,第一行程支架373开设有与丝杆371的相对于连接端3711的另一端连接的连接孔3731。连接孔3731沿第一行程支架373的厚度方向开设。第二行程支架374开设有第一穿孔3741及第二穿孔3742。第一穿孔3741用于供丝杆371的连接端3711穿出。第二穿孔3742用于供机臂驱动装置36的驱动转轴361穿出。本实施例中,第一穿孔3741及第二穿孔3742在第二行程支架374的宽度方向及长度方向上均错开,以免机臂连接件30组装完成后,机臂驱动装置36阻碍滑动板372的移动。可以理解,为避免机臂连接件30组装完成后,机臂驱动装置36阻碍滑动板372的移动,也可以将机臂驱动装置36设置在第二行程支架374背离第一行程支架373的一侧,且与丝杆371的连接端3711直接连接。具体地,机臂驱动装置36的驱动转轴361可以通过联轴器与丝杆371的连接端3711直接固定连接。
本实施例中,传动组件37还包括第一齿轮375及与第一齿轮375啮合的第二齿轮376。机臂驱动装置36与第一齿轮375连接。第二齿轮376与丝杆371的连接端3711固定连接。机臂驱动装置36驱动第一齿轮375转动,进而带动与第二齿轮376固定连接的丝杆371转动。本实施例中,第一齿轮375及第二齿轮376均设置在第二行程支架374背离第一行程支架373的一侧。
可以理解,其他实施例中,第一齿轮375及第二齿轮376可以分别替换为第一带轮及第二带轮。第一带轮与第二带轮通过传动带连接。机臂驱动装置36驱动第一带轮转动,从而通过传动带带动第二带轮转动,进而带动丝杆371转动。
本实施例中,为增加滑动板372滑动时的稳定性,传动组件37还包括连接在第一行程支架373及第二行程支架374之间的第一滑杆377及第二滑杆378。第一滑杆377及第二滑杆378分别穿设在第一滑孔3724及第二第二滑孔3725中,且各自的相对两端均分别与第一行程支架373及第二行程支架374固定连接。本实施例中,第一行程支架373开设有用于与第一滑杆377及第二滑杆378固定连接的固接孔3732及3733。可选地,固接孔3732及3733相对于连接孔3731的轴线呈轴对称设置。第二行程支架374开设有用于与第二滑杆377及第二滑杆378固定连接的固接孔3743及3744。相应地,固接孔3743及3744相对于第一穿孔3741的轴线呈轴对称设置。本实施例中,第一滑杆377及第二滑杆378一方面能够对滑动板372的滑动起到导引的作用,使得滑动板372保持丝杆371轴向移动;另一方面对滑动板372及丝杆371有一定的支撑作用,当与第一机臂固接件33或第二机臂固接件35连接的机臂组件20受到冲击时,冲击所造成的扭矩能够由丝杆371,第一滑杆377及第二滑杆378共同承担,避免了与第一机臂固接件33或第二机臂固接件35连接的机臂组件20受到的冲击所导致的扭矩过大,造成滑动板372或者丝杆371的折弯及损坏;另外,能够对第一行程支架373及第二行程支架374起到一定的支撑作用,增强第一行程支架373及第二行程支架374的刚度。
可以理解,为便于丝杆371的转动,传动组件37还可以包括第一轴承3791及第二轴承3792。第一轴承3791及第二轴承3792分别连接在丝杆371的相对两端,且分别设置在连接孔3731及第一穿孔3741中。丝杆371与连接端3711相对的另一端通过第一轴承3791与第一行程支架373连接。丝杆371的连接端3711通过第二轴承3792与第二行程支架374连接,且连接端3711自第二轴承3792的中轴孔穿出,以便与第二齿轮376连接。
可以理解,为限定丝杆371的轴向运动,以增加丝杆371及机臂驱动装置36转动时的稳定性,传动组件37还可以包括两个卡簧370。丝杆371的连接端3711设置有供卡簧370卡设的卡接部3712。机臂驱动装置36的驱动转轴361设置有供卡簧370卡设的卡接部3611。两个卡簧370分别设置在卡接部3712及3611处,且在机臂连接件30组装完成后,位于第二行程支架374靠近第一行程支架373的一侧,并抵靠第二行程支架374。
第一机臂固接件33及第二机臂固接件35分别与传动组件37连接。本实施例中,第一机臂固接件33及第二机臂固接件35分别与滑动板372两端的第一滑槽3722及第二滑槽3723滑动连接。
本实施例中,第一机臂固接件33开设有供第一连接轴32穿设的连接孔330。连接孔330沿第一机臂固接件33的厚度方向开设。第一机臂固接件33包括机臂固接端331及相对于机臂固接端331的滑动连接端333。本实施例中,滑动连接端333与机臂固接端331之间的夹角呈钝角。
机臂固接端331开设有机臂连接孔3311,用于与机臂组件20的机臂21相对于与支架22连接的端部的另一端固定连接。机臂连接孔3311自机臂固接端331远离滑动连接端333的端面向机臂固接端331的内部开设。本实施例中,连接孔3311的孔壁开设有固定孔,相应地,机臂21也开设有固定孔,通过螺钉与连接孔3311的孔壁的固定孔及机臂21的固定孔配合,使得机臂21与第一机臂固接件33固定连接。可以理解,本申请并不限于使用螺钉与螺孔的配合来使得机臂21与第一机臂固接件33固定连接,例如,还可以通过焊接,卡接等方式,只要能使得机臂21与第一机臂固接件33固定连接即可。
滑动连接端333包括平行设置的第一延伸臂3331及第二延伸臂3333。第一延伸臂3331及第二延伸臂3333自连接孔330所在位置沿远离机臂固接端331的方向延伸。第一延伸臂3331与第二延伸臂3333之间的垂直距离大于等于滑动板372的厚度。第一延伸臂3331沿其厚度方向开设有与滑块连接的轴孔3332。第二延伸臂3333沿其厚度方向开设有与滑块连接的轴孔3334。轴孔3332与轴孔3334共轴设置。本实施例中,机臂连接件30还包括设置在第一滑槽3722中第一滑块381。第一滑块381与滑动连接端333转动连接。本实施例中,第一滑块381与第一延伸臂3331及第二延伸臂3333转动连接。第一延伸臂3331及第二延伸臂3333将第一滑块381限定在第一滑槽3722中。第一滑块381开设有轴孔3811。轴孔3811与轴孔3332及轴孔3334通过转轴连接。
本实施例中,第二机臂固接件35开设有供第二连接轴34穿设的连接孔350。连接孔350沿第二机臂固接件35的厚度方向开设。第二机臂固接件35包括机臂固接端351及相对于机臂固接端351的滑动连接端353。本实施例中,滑动连接端353与机臂固接端351之间的夹角呈钝角。
机臂固接端351开设有机臂连接孔3511,用于与另一机臂组件20的机臂21相对于与支架22连接的端部的另一端固定连接。机臂连接孔3511自机臂固接端351远离滑动连接端353的端面向机臂固接端351的内部开设。本实施例中,连接孔3511的孔壁开设有固定孔,相应地,机臂21也开设有固定孔,通过螺钉与连接孔3511的孔壁的固定孔及机臂21的固定孔配合,使得机臂21与第二机臂固接件35固定连接。可以理解,本申请并不限于使用螺钉与螺孔的配合来使得机臂21与第二机臂固接件35固定连接,例如,还可以通过焊接,卡接等方式,只要能使得机臂21与第二机臂固接件35固定连接即可。
滑动连接端353包括平行设置的第一延伸臂3531及第二延伸臂3533。第一延伸臂3531及第二延伸臂3533自连接孔350所在位置沿远离机臂固接端351的方向延伸。第一延伸臂3531与第二延伸臂3533之间的垂直距离大于等于滑动板372的厚度。第一延伸臂3531沿其厚度方向开设有与滑块连接的轴孔3532。第二延伸臂3533沿其厚度方向开设有与滑块连接的轴孔3534。轴孔3532与轴孔3534共轴设置。本实施例中,机臂连接件30还包括设置在第二滑槽3723中第二滑块382。第二滑块382与滑动连接端353转动连接。本实施例中,第二滑块382与第一延伸臂3531及第二延伸臂3533转动连接。第一延伸臂3531及第二延伸臂3533将第二滑块382限定在第二滑槽3723中。第二滑块382开设有轴孔3821。轴孔3821与轴孔3532及轴孔3534通过转轴连接。
本申请提供的机臂连接件30,当机臂驱动装置36驱动丝杆371转动时,由于丝杆371与滑动板372螺纹连接,且滑动板372的相对两端由于第一滑杆377及第二滑杆378的限制无法跟随丝杆371转动,而是将转动转换为沿丝杆371轴向的移动。而由于滑动板372的相对两端分别通过滑块与第一机臂固接件33的滑动连接端333及第二机臂固接件35的滑动连接端353滑动连接,滑动板372沿丝杆371的移动,促使第一机臂固接件33及第二机臂固接件35分别绕第一连接轴32和第二连接轴34反向同步转动,从而实现与第一机臂固接件33连接的机臂组件20及与第二机臂固接件35连接的机臂组件的折叠及展开。
本申请提供的机臂连接件30通过机臂驱动装置36能够使得分别连接机臂组件20的第一机臂固接件33及第二机臂固接件35的反向同步转动,以及转动到位后的定位及锁死。第一机臂固接件33及第二机臂固接件35的可转动角度可以根据需要进行设计为0°到180°之间的任意角度,例如,45°,90°,120°等等。本申请所提供的机臂连接件30具有占用空间小,驱动动力强,定位及锁死可靠等优点,适用于各类双轴、四轴以及多轴无人及载人航空飞行器的机臂连接,且能够使得所连接的机臂组件20并与收纳、折叠,减少机臂组件20所占用的空间,配合动力组件10的收拢和展开设计,能够尽可能的降低机臂组件20所占用的空间。
可以理解,请一并参阅图24及图25,其他实施例中,滑动板372的相对两端与第一机臂固接件33及第二机臂固接件35通过齿轮连接。此时,滑动板372相对两端的第一滑槽3722及第二滑槽3723可省略,取而代之地,传动组件37包括分别连接在滑动板372相对两端的第一齿条3726及第二齿条3727。第一齿条3726包括连接端及齿端。第一齿条通过其连接端与滑动板372的一端固定连接。本实施例中,第一齿条3726的齿端的齿结构沿垂直于滑动板372的长度方向的直线设置。第二齿条3727具有与第一齿条3726相同的结构。相应地,第二齿条3727包括连接端及齿结构端。第二齿条3727通过其连接端与滑动板372的另一端固定连接。第二齿条3727的齿端的齿结构沿垂直于滑动板372的长度方向的直线设置。本实施例中,第一齿条3726的齿结构与第二齿条3727的齿结构平行且朝向相反的方向设置。可选地,第一齿条3726及第二齿条3727也可以与滑动板372一体成型。相应地,第一机臂固接件33的滑动连接端333及第二机臂固接件35的滑动连接端353可省略。取而代之地,第一机臂固接件33包括与第一齿条3726啮合的第一齿接部334。第一齿接部334设置在第一机臂固接件33远离机臂固接端331的端部。第一齿接部334的齿结构沿第一机臂固接件33宽度方向的呈弧线设置,且第一齿接部334与连接孔330共轴设置。第二机臂固接件35包括与第二齿条3727啮合的第二齿接部354。第二齿接部354设置在第二机臂固接件35远离机臂固接端351的端部。第二齿接部354的齿结构沿第二机臂固接件35宽度方向的呈弧线设置,且第二齿接部354与连接孔350共轴设置。
本实施例提供的机臂连接件30,当机臂驱动装置36驱动丝杆371转动时,由于丝杆371与滑动板372螺纹连接,且滑动板372的相对两端由于第一滑杆377及第二滑杆378的限制无法跟随丝杆371转动,而是将转动转换为沿丝杆371轴向的移动。而由于滑动板372的相对两端分别通过第一齿条3726及第二齿条3727与第一机臂固接件33的第一齿接部334及第二机臂固接件35的第二齿接部353连接,滑动板372沿丝杆371的移动,促使第一机臂固接件33及第二机臂固接件35分别绕第一连接轴32和第二连接轴34反向同步转动,从而实现与第一机臂固接件33连接的机臂组件20及与第二机臂固接件35连接的机臂组件的折叠及展开。
可以理解,其他实施例中,滑动板372可以通过齿轮和齿条的配合实现沿第一滑杆377及第二滑杆378的移动,此时,滑动板372的螺纹孔3721,丝杆371,第一轴承3791及第二轴承3792可省略。机臂驱动装置36的驱动转轴361可以垂直于滑动板372的厚度方向设置。齿轮与驱动转轴361固定连接。齿条与滑动板372固定连接且沿滑动板372的宽度方向设置。齿条与齿轮啮合,机臂驱动装置36通过驱动齿轮带动与齿轮啮合的齿条移动,进而带动滑动板372移动。可选地,齿条,齿轮及机臂驱动装置36可以设置在第一滑杆377及第二滑杆378之间。
可以理解,其他实施例中,第一滑块381及第二滑块382可以采用深沟球轴承代替。
可以理解,其他实施例中,第一滑杆377及第二滑杆378可省略。或者前述实施例中一根丝杆与两个滑杆的设计可以采用两根丝杆代替。可选地,两根丝杆相对于滑动板372宽度方向的中线轴对称设置。相应地,针对两根丝杆分别设置前述实施例中的包机臂驱动装置36,第一齿轮375及第二齿轮376的传动机构,具体的设置方式可以参照前述实施例,在此不再赘述。
请一并参阅图26到图29,本申请又一实施例提供一种机臂连接件30a,用于将机臂组件20连接至无人机的机身。
请参阅图26,本实施例中,机臂连接件30a包括机身固接件31a及连接在机臂固接件31a相对两端的第一机臂固接件33a及第二机臂固接件35a。第一机臂固接件33a及第二机臂固接件35a分别与一个机臂组件20的机臂21固定连接。
机身固接件31a与无人机的机身固定连接。本实施例中,机身固接件31a包括平行且间隔设置的上压板311a及下压板313a。上压板311a与下压板313a分别与无人机的机身固定连接。
请一并参阅图26,图27及图28,上压板311a开设有两个轴接孔3111a及两个第一连接孔3113a。轴接孔3111a及第一连接孔3113a均沿上压板311a的厚度方向开设。本实施例中,两个轴接孔3111a及两个连接孔3113a均为通孔。两个轴接孔3111a分别位于上压板311a的相对两端。两个第一连接孔3113a位于两个轴接孔3111a之间。
可选地,为增大孔深,进而增大基于轴接孔3111a及第一连接孔3113a的连接稳定性,本实施例中,上压板311a可以包括自上压板311a靠近下压板313a的一侧向外凸设的凸起部3112a,且轴接孔3111a及第一连接孔3113a均自凸起部3112a靠近下压板313a的一侧向上压板311a的内部开设。
下压板313a开设有两个轴接孔3131a及两个第三连接孔3133a。两个轴接孔3131a分别位于下压板313a的相对两端。两个第三连接孔3133a位于两个轴接孔3131a之间。本实施例中,轴接孔3131a及第三连接孔3133a为自下压板313a靠近上压板311a的一侧向下压板313a内部开设的盲孔。
相应地,为增大孔深,进而增大基于轴接孔3131a及第三连接孔3133a的连接稳定性,本实施例中,下压板313a可以包括自下压板313a靠近上压板311a的一侧向外凸设的凸起部3132a,且轴接孔3131a及3133a均自凸起部3132a靠近上压板311a的一侧向下压板313a的内部开设。
机臂连接件30a组装完成后,轴接孔3131a与轴接孔3111a相对且共轴设置,第三连接孔与第一连接孔3113a相对且共轴设置。
可以理解,上压板311a及下压板313a上还开设有用于与无人机的机身固定连接的连接孔(图未示)。
本实施例中,机臂连接件30a还包括第一连接轴32a及第二连接轴34a。第一连接轴32a及第二连接轴34a分别连接在机身固接件31a的相对两端。第一机臂固接件33a与机身固接件31a通过第一连接轴32a可转动地连接。第二机臂固接件35a与机身固接件31a通过第二连接轴34a可转动地连接。第一连接轴32a的两端分别与上压板311a的轴接孔3111a及下压板313a的轴接孔3131a连接。第二连接轴34a的两端分别与上压板311a的轴接孔3111a及下压板313a的轴接孔3131a连接。
可以理解,为避免第一连接轴32a及第二连接轴34a晃动,机身固接件31a还可以包括端盖315a。本实施例中,端盖315a设置在上压板311a背离下压板313a的一侧,且与上压板311a固定连接,用于将第一连接轴32a及第二连接轴34a限定在端盖315a与下压板313a之间。可选地,端盖315a与上压板311a可通过螺孔与螺钉的配合或者卡扣和卡槽的配合实现固定连接。
请一并参阅图26及图28,本实施例中,机臂连接件30a还包括机臂驱动装置36a,以及连接在机臂驱动装置36a与第一机臂固接件33a及机臂驱动装置36a与第二机臂固接件35a之间的传动组件37a。机臂驱动装置36a,传动组件37a,第一机臂固接件33a及第二机臂固接件35a均设置在上压板311a与下压板313a之间。本实施例中,第一机臂固接件33a及第二机臂固接件35a分别对应一个机臂驱动装置36a及一个转动组件37a。与第一机臂固接件33a对应的机臂驱动装置36a,通过驱动相应的传动组件37a带动第一机臂固接件33a转动,进而带动与第一机臂固接件33a连接的机臂组件20实现旋转展开或收拢。与第二机臂固接件35a对应的机臂驱动装置36a,通过驱动相应的传动组件37a带动第二机臂固接件33a转动,进而带动与第二机臂固接件35a连接的机臂组件20实现旋转展开或收拢。本实施例中,与第一机臂固接件33a对应的机臂驱动装置36a和与第二机臂固接件35a对应的机臂驱动装置36a为同步电机且转动方向相反。
本实施例中,机臂驱动装置36a固定在下压板313a上。机臂驱动装置36a包括电机361a及第一传动轮363a。电机361a与第一传动轮363a连接,用于驱动第一传动轮363a转动。
本实施例中,机臂驱动装置36a还可以包括电机安装座362a。电机安装座362a用于将电机361a固定在下压板313a上,并支撑第一传动轮363a。
电机安装座362a大致呈拱桥状,包括安装平台3621a,第一侧板3622a及第二侧板(图未示)。第一侧板3622a及第二侧板分别连接在安装平台3621a的两端,用于支撑安装平台3621a。第一侧板3622a,安装平台3621a及第二侧板围成桥洞状的收容空间。
本实施例中,电机361a收容在该桥洞状的收容空间内,并通过该电机安装座362a固定在下压板313a上。电机361a的转轴自安装平台3621a背离下压板313a的一侧穿出,并与第一传动轮363a连接,以驱使第一传动轮363a转动。
第一传动轮363a设置在安装平台3621a上,且第一传动轮363a的轮轴垂直于安装平台3621a。可选地,第一侧板3622a及第二侧板垂直连接在安装平台3621a的两端。可以理解,其他实施例中,第一侧板3622a及第二侧板也可以与安装平台3621a呈其他角度(例如钝角)地连接在安装平台3621a的两端,本申请并不以此为限。
本实施例中,电机安装座362a还可以包括第一凸耳3624a及第二凸耳(图未示)。第一凸耳3624a及第二凸耳分别连接在第一侧板3622a及第二侧板远离安装平台3621a的一端,用于固定电机安装座362a。本实施例中,第一凸耳3624a及第二凸耳可以通过螺钉与螺孔配合的方式或者卡扣与卡槽配合的方式与下压板313a固定连接,以将电机安装座362a固定在下压板313a上。
可选地,第一凸耳3624a及第二凸耳均与安装平台3621a平行设置,且第一凸耳3624a与第二凸耳位于同一平面。可选地,第一凸耳3624a及第二凸耳沿相反的方向远离彼此的延伸设置。
传动组件37a与机臂驱动装置36a传动连接。本实施例中,传动组件37a与第一传动轮363a传动连接。
传动组件37a可以是拨轮组件。传动组件37a包括拨轮371a及与拨轮371a固定连接的第二传动轮373a。本实施例中,传动组件37a还包括拨轮轴375a。拨轮371a与拨轮轴375a固定连接,第二传动轮373a与拨轮轴375a固定连接,第二传动轮373a通过拨轮轴375a与拨轮371a固定连接。本实施例中,拨轮371a的拨杆3713a沿远离第二传动轮373a的方向延伸,且与第二传动轮373a在拨轮轴375a的轴向上间隔设置,以免机臂驱动装置36a在驱动第二传动轮373a带动拨轮371a转动时,机臂驱动装置36a对拨轮371a的转动形成阻挡。
本实施例中,拨轮371a与拨轮轴375a一体成型。拨轮371a包括本体3711a及自本体3711a外缘凸设的拨杆3713a。本体3711a可以与拨轮轴375a共轴设置。本实施例中,拨杆3713a的数量为1。拨杆3713a的延伸方向平行于拨轮371a的轴向。本实施例中,拨杆3713a自本体3711a的外缘沿本体3711a的径向向外凸设且拨杆3713a的延伸方向平行于拨轮371a的轴向。
本实施例中,第二传动轮373a套设在拨轮轴375a上,且第二传动轮373a与第一传动轮363a传动连接。第二传动轮373a的半径可以例如大于第一传动轮363a的半径,且小于拨轮371a的本体3711a的中心到拨杆3713a的远端的距离。本实施例中,第一传动轮363a及第二传动轮373a均为齿轮。第二传动轮373a与第一传动轮363a啮合。可以理解,其他实施例中,第二传动轮373a也可以与拨轮轴375a一体成型,本申请对此不作限定。
本实施例中,拨轮轴375a的相对两端分别设置在第一连接孔3113a及第三连接孔3133a内,且拨轮轴375a的相对两端分别与第一连接孔3113a及第三连接孔3133a可转动地连接。为便于拨轮轴375a的转动,机臂连接件30a还可以包括轴承(图未示)。轴承可以设置在第一连接孔3113a和/或第三连接孔3133a中,且位于拨轮轴375a与第一连接孔3113a的孔壁和/或拨轮轴375a与第三连接孔3133a的孔壁之间。
第一机臂固接件33a与机臂组件20的机臂21的一端固定连接,并通过第一连接轴32a可转动地连接至机身固接件31a。第一机臂固接件33a与对应的传动组件37a的拨轮371a传动连接。第二机臂固接件35a与另一机臂组件20的机臂21的一端固定连接,并通过第二连接轴34a可转动地连接至机身固接件31a。第二机臂固接件35a与对应的传动组件37a的拨轮371a传动连接。本实施例中,第一机臂固接件33a和与之固定连接的机臂组件20的机臂21一体成型。第二机臂固接件35a和与之固定连接的机臂组件20的机臂21一体成型。可以理解,其他实施例中,也可以通过螺孔与螺钉的配合或卡扣与卡槽的配合使得机臂固接件与相应的机臂组件20的机臂21的一端固定连接,本申请对此不作限定。
第一机臂固接件33a为槽轮。本实施例中,第一机臂固接件33a包括自第一机臂固接件33a的外缘向第一机臂固接件33a的内部沿第一机臂固接件33a的径向开设的槽道331a,及沿第一机臂固接件33a外缘设置的至少两个弧形部333a。槽道331a位于相邻的两个弧形部333a之间。弧形部333a所在圆的半径与对应的传动组件37a的拨轮371a的本体3711a的半径相同。本实施例中,槽道331a的数量为两个,相应的弧形部333a的数量为三个。第一机臂固接件33a通过槽道331a与对应的传动组件37a的拨杆3713a的配合,实现与传动组件37a的拨轮371a的传动连接。
第二机臂固接件35a也为槽轮,且具有与第一机臂固接件33a相同的结构。相应地,第二机臂固接件35a包括自第二机臂固接件35a的外缘向第二机臂固接件35a的内部沿第二机臂固接件35a的径向开设的槽道351a,及沿第二机臂固接件35a外缘设置的至少两个弧形部353a。槽道351a位于相邻的两个弧形部353a之间。弧形部353a所在圆的半径与对应的传动组件37a的拨轮371a的本体3711a的半径相同。本实施例中,槽道351a的数量为两个,相应的弧形部353a的数量为三个。第二机臂固接件35a通过槽道351a与对应的传动组件37a的拨杆3713a的配合,实现与传动组件37a的拨轮371a的传动连接。
可以理解,为便于第一机臂固接件33a及第二机臂固接件35a的转动,还可以在第一机臂固接件33a与第一连接轴32a之间及第二机臂固接件35a与第二连接轴34a之间设置轴承。
工作时,机臂驱动装置36a驱动第一传动轮363a转动;第一传动轮363a带动第二传动轮373a转动;由于第二传动轮373a与拨轮轴375a固定连接,且拨轮371a与拨轮轴375a固定连接,第二传动轮373a带动拨轮轴375a转动,继而带动拨轮371a转动;由于拨轮371a与机臂固接件(包括第一机臂固接件33a及第二机臂固接件35a)传动连接,且机臂固接件与机臂组件20的机臂21固定连接,拨轮371a转动带动机臂固接件转动,进而带动机臂组件20转动,以实现机臂组件的旋转展开及旋转折叠。
请参阅图29,下面以第一机臂固接件33a与对应的传动组件37a的拨轮371a的配合为例,对拨轮371a与机臂固接件之间的配合实现旋转展开的过程进行介绍。
初始状态下(对应图29中的状态1),第一机臂固接件33a所连接的机臂组件20处于折叠状态。此时,拨轮371a的本体3711a的外缘与第一机臂固接件33a左侧的弧形部333a耦合,且拨轮371a的拨杆3713a背离机臂固接件33a设置。当机臂驱动装置36a驱动第一传动轮363a带动第二传动轮373a沿逆时针方向转动,拨轮371a的拨杆3713a转动至第一机臂固接件33a的左侧弧形部333a与中间弧形部333a之间的槽道331a(为便于描述,以下简称,第一槽道)的槽口处(对应图29中的状态2)。当电机361a继续驱动第一传动轮363a带动第二传动轮373a转动,进而带动拨轮371a沿逆时针方向转动时,拨杆3713a沿第一槽道滑入,并通过与第一槽道的槽壁的相互作用带动第一机臂固接件33a沿顺时针方向转动(对应图29中的状态3)。拨杆3713a随着拨轮371a的转动逐渐滑至第一槽道靠近第一机臂固接件33a轴心,此时,若拨轮371a在第二传动轮373a的带动下继续沿逆时针方向转动,拨杆3713a将沿远离第一机臂固接件33a的轴心的方向顺着第一槽道滑回至第一槽道的槽口(对应图29中的状态4)。
当拨杆滑回至第一槽道的槽口时,若拨轮371a在第二传动轮373a的带动下继续沿逆时针方向转动,拨杆3713a到达槽轮的中间弧形部333a与右侧弧形部333a之间的槽道331a(为便于描述,以下简称第二槽道)的槽口。此时,若拨轮371a在第二传动轮373a的带动下继续沿逆时针方向转动,拨杆3713a将与第二槽道配合重复前述拨杆3713a与第一槽道的传动过程,进而使得第一机臂固接件33a所连接的机臂组件达到展开状态。第一机臂固接件33a所连接的机臂组件由展开状态转换为折叠状态的过程则与上述过程相反,在此不再赘述。
第二机臂固接件35a与对应的传动组件37a的拨轮371a的配合过程与上述过程相同,在此不再赘述。
可以理解,机臂固接件(第一机臂固接件33a及第二机臂故借鉴35a)可转动的角度范围与拨轮371a的拨杆3713a数量,机臂固接件上的槽道的数量及槽道之间的夹角相关,本领域技术人员可根据需要进行设计,本申请对此不做限定。
可以理解,其他实施例中,第一机臂固接件33a与第一连接轴32a可以一体成型。第二机臂固接件35a与第二连接轴34a可以一体成型,此时,机臂固接件与连接轴一起相对于轴接孔转动。
本申请实施例提供的机臂连接件,通过机臂驱动装置36a驱动传动组件37a转动,从而带动第一机臂固接件33a及与第一机臂固接件33a固定连接的机臂组件20,或第二机臂固接件35a及与第二机臂固接件35a固定连接的机臂组件20转动,使得机臂组件20展开或收拢,由此,可使得机臂组件20在使用时展开,在不使用时收拢,方便无人机的收纳。
请参阅图30,本申请又一实施例提供一种机臂连接件30b,用于将机臂组件20连接至无人机的机身。
本实施例中,机臂连接件30b包括机身固接件31b及与机身固接件31b连接的机臂固接件33b。
机身固接件31b与无人机的机身固定连接。本实施例中,机身固接件31b包括平行且间隔设置的上压板311b及下压板313b,以及与上压板311b及下压板313b垂直连接的安装板312b。机身固接件31b通过安装板312b与无人机的机身固定连接。
上压板311b开设有轴接孔(图未示)及第一连接孔(图未示)。轴接孔及第一连接孔均沿上压板311b的厚度方向开设。本实施例中,轴接孔及第一连接孔均为通孔,且轴接孔较第一连接孔更靠近安装板312b。
下压板313b包括平行设置的第一安装部3131b和第二安装部3133b,以及连接在第一安装部3131b与第二安装部3133b之间的连接部3132b。第一安装部3131b,连接部3132b与第二安装部3133b共同形成台阶结构。第一安装部3131b开设有第三连接孔(图未示)。第三连接孔与第一连接孔3113b共轴设置,且第三连接孔为通孔。第二安装部3133b开设有与上压板311b的轴接孔共轴设置的轴接孔(图未示)。本实施例中,第二安装部3133b所开设的轴接孔为开口朝向上压板311b的盲孔。
本实施例中,机臂连接件30b还包括连接轴(图未示)。机臂固接件33b通过连接轴与机身固接件31b可转动地连接。本实施例中,连接轴的两端分别穿设在上压板311b的轴接孔及第二安装部3133b的轴接孔中。
可以理解,为避免连接轴晃动,机身固接件31b还可以包括端盖315b。本实施例中,端盖315b设置在上压板311b背离下压板313b的一侧,且与上压板311b固定连接,用于将连接轴限定在端盖315b与下压板313b的第二安装部3133b之间。可选地,端盖315b与上压板311b可通过螺孔与螺钉的配合或者卡扣和卡槽的配合实现固定连接。
本实施例中,机臂连接件30b还包括机臂驱动装置36b,以及连接在机臂驱动装置36a与机臂固接件33b之间的传动组件37b。机臂驱动装置36b驱动传动组件37b带动机臂固接件33b转动,以实现带动与机臂固接件33b连接的机臂组件20实现旋转展开或收拢。
机臂驱动装置36b设置在第一安装部3131b与连接部3132b及安装板312b所围成的空间内,且机臂驱动装置36b与安装板312b和/或第一安装部3131b和/或连接部3132b固定连接。本实施例中,机臂驱动装置36b为电机,其转轴自第一安装部3131b的第三连接孔穿出至第一安装部3131b与上压板311b之间。
传动组件37b设置在上压板311b与第一安装部3131b之间。本实施例中,传动组件37b包括拨轮371b及拨轮轴(图未示)。拨轮轴与机臂驱动装置36b的转轴固定连接。拨轮371b与拨轮轴固定连接。机臂驱动装置36b驱动转轴转动,带动拨轮轴转动进而带动拨轮371b转动。可以理解,拨轮371b可以与拨轮轴一体成型。
本实施例中,拨轮371b包括本体3711b及自本体3711b外缘凸设的拨杆3713b。本体3711b可以与拨轮轴375a共轴设置。本实施例中,拨杆3713b的数量为1。拨杆3713b的延伸方向平行于拨轮371b的轴向。本实施例中,拨杆3713b自本体3711b的外缘沿本体3711b的径向向外凸设且拨杆3713b的延伸方向平行于拨轮371b的轴向。
拨轮轴的相对两端分别设置在第一连接孔及第三连接孔中,且拨轮轴的相对两端分别与第一连接孔及第三连接孔可转动地连接。为便于拨轮轴的转动,机臂连接件30a还可以包括轴承(图未示)。轴承可以设置在第一连接孔和/或第三连接孔中,且位于拨轮轴与第一连接孔的孔壁和/或拨轮轴与第三连接孔的孔壁之间。
机臂固接件33b与机臂组件20的机臂21的一端固定连接,并通过连接轴可转动地连接至机身固接件31b。机臂固接件33b与对应的传动组件37b的拨轮371b传动连接。本实施例中,机臂固接件33b和与之固定连接的机臂组件20的机臂21一体成型。可以理解,其他实施例中,也可以通过螺孔与螺钉的配合或卡扣与卡槽的配合使得机臂固接件33b与机臂组件20的机臂21的一端固定连接,本申请对此不作限定。
本实施例中,机臂固接件33b为槽轮。本实施例中,机臂固接件33b包括自机臂固接件33b的外缘向机臂固接件33b的内部沿机臂固接件33b的径向开设的槽道331b,及沿机臂固接件33b外缘设置的至少两个弧形部333b。槽道331b位于相邻的两个弧形部333b之间。弧形部333b所在圆的半径与传动组件37b的拨轮371b的本体3711b的半径相同。本实施例中,槽道331b的数量为两个,相应的弧形部333a的数量为三个。机臂固接件33b通过槽道331b与传动组件37b的拨杆3713b的配合,实现与传动组件37b的拨轮371b的传动连接。
可以理解,为便于机臂固接件33b的转动,还可以在机臂固接件33b与连接轴之间设置轴承。
工作时,机臂驱动装置36b驱动其转轴带动拨轮轴转动,继而带动拨轮371b转动;由于拨轮371b与机臂固接件33b传动连接,且机臂固接件与机臂组件20的机臂21固定连接,拨轮371b转动带动机臂固接件33b转动,进而带动机臂组件20转动,以实现机臂组件的旋转展开及旋转折叠。
拨轮371b与机臂固接件33b的具体配合过程可以参考前述实施例,在此不再赘述。
请参阅图31,本申请再一实施例还提供一种机臂连接件30c,用于将机臂组件20连接至无人机的机身。
本实施例中,机臂连接件30c包括机身固接件31c及连接在机臂固接件31c相对两端的第一机臂固接件33c及第二机臂固接件35c。第一机臂固接件33c及第二机臂固接件35c分别与一个机臂组件20的机臂21固定连接。
机身固接件31c与无人机的机身固定连接。本实施例中,机身固接件31c包括平行且间隔设置的上压板311c及下压板313c。上压板311c与下压板313c分别与无人机的机身固定连接。本实施例中,上压板311c开设有两个轴接孔3111c及两个第一连接孔3113c及两个第二连接孔3115c。轴接孔3111c,第一连接孔3113c及第二连接孔3115c均沿上压板311c的厚度方向开设。两个轴接孔3111c分别位于上压板311c的相对两端。两个第一连接孔3113c位于两个轴接孔3111c之间。两个第二连接孔3115c位于两个第一连接孔3113c之间。下压板313c开设有两个轴接孔(图未示),两个第三连接孔(图未示)及两个第四连接孔(图未示)。两个轴接孔分别位于下压板313c的相对两端。两个第三连接孔位于两个轴接孔之间。两个第四连接孔位于两个第三连接孔之间。机臂连接件30c组装完成后,下压板313c的轴接孔与上压板311c的轴接孔3111c相对且共轴设置,第三连接孔与第一连接孔3113c相对且共轴设置,及第四连接孔与第二连接孔3115c相对且共轴设置。本实施例中,下压板313c靠近上压板311c一侧的表面凸设有凸块3132c。凸块3132c用于设置调节传动带与带轮的张紧程度的抵杆。
可以理解,上压板311c及下压板313c上还开设有用于与无人机的机身固定连接的连接孔。机身固接件31c还可以包括多个辅助支撑件315c,用于支撑下压板313c。
本实施例中,机臂连接件30c还包括第一连接轴32c及第二连接轴34c。第一连接轴32c及第二连接轴34c分别连接在机身固接件31c的相对两端。第一机臂固接件33c与机身固接件31c通过第一连接轴32c可转动地连接。第二机臂固接件35c与机身固接件31通过第二连接轴34c可转动地连接。第一连接轴32c的两端分别与上压板311c的轴接孔3111c及下压板313c的轴接孔连接。第二连接轴34c的两端分别与上压板311c的轴接孔3111c及下压板313c的轴接孔连接。可以理解,为避免第一连接轴32c及第二连接轴34c晃动,可以在上压板311c的轴接孔3111c及下压板313c的轴接孔处设置轴承端盖。
本实施例中,机臂连接件30c还包括机臂驱动装置36c,以及连接在机臂驱动装置36c与第一机臂固接件33c及所述第二机臂固接件35c之间的传动组件37c。机臂驱动装置36c,传动组件37c,第一机臂固接件33c及第二机臂固接件35c均设置在上压板311c与下压板313c之间。本实施例中,第一机臂固接件33c及第二机臂固接件35c分别对应一个机臂驱动装置36c及一个转动组件37c。与第一机臂固接件33c对应的机臂驱动装置36c,通过驱动相应的传动组件37c带动第一机臂固接件33c转动,进而带动与第一机臂固接件33c连接的机臂组件20实现旋转展开或收拢。与第二机臂固接件35c对应的机臂驱动装置36c,通过驱动相应的传动组件37c带动第二机臂固接件33c转动,进而带动与第二机臂固接件35c连接的机臂组件20实现旋转展开或收拢。本实施例中,与第一机臂固接件33c对应的机臂驱动装置36c和与第二机臂固接件35c对应的机臂驱动装置36c为同步电机且转动方向相反。
本实施例中,机臂驱动装置36c固定在下压板313c上。机臂驱动装置36c包括电机361c及第一传动轮363c。电机361c与第一传动轮363c连接,用于驱动第一传动轮363c转动。
本实施例中,机臂驱动装置36c还可以包括电机安装座362c。电机安装座362c用于支撑电机361c及第一传动轮363c。电机安装座362c大致呈拱桥状,包括安装平台3621c,第一侧板3622c及第二侧板3623c。第一侧板3622c及第二侧板3623c分别连接在安装平台3621c的两端,用于支撑安装平台3621c。第一侧板3622c,安装平台3621c及第二侧板3623c围成桥洞状的收容空间。
本实施例中,电机361c安装在安装平台3621c上。电机361c远离安装平台的一端穿设在第一连接孔3113c中。第一传动轮363c设置在桥洞状的收容空间中,且第一传动轮363c的轮轴垂直于安装平台3621c。电机361c的驱动轴穿过安装平台3621c与第一传动轮363c连接,且穿设在第三连接孔内。可选地,第一侧板3622c及第二侧板3623c垂直连接在安装平台3621c的两端。可以理解,其他实施例中,第一侧板3622c及第二侧板3623c也可以与安装平台3621c呈其他角度(例如钝角)地连接在安装平台3621c的两端,本申请并不以此为限。
本实施例中,电机安装座362c还可以包括第一凸耳3624c及第二凸耳3625c。第一凸耳3624c及第二凸耳3625c分别连接在第一侧板3622c及第二侧板3623c远离安装平台3621c的一端,用于固定电机安装座362c。可选地,第一凸耳3624c及第二凸耳3625c均与安装平台3621c平行设置,且第一凸耳3624c与第二凸耳3625c位于同一平面。可选地,第一凸耳3624c及第二凸耳3625c沿相反的方向远离彼此的延伸设置。本实施例中,第一凸耳3624c开设有长条形的第一调节槽3626c。第二凸耳3625c开设有长条形的第二调节槽(图未示)。第二调节槽与第一调节槽3626c相互平行且平行于第一侧板3622c及第二侧板3623c。第一调节槽3626c及第二调节槽用于在第一传动轮363c为带轮时,与固定螺栓(固定螺栓用于固定电机安装座362c)配合调节传动带与带轮的张紧程度。本实施例中,第一凸耳3624c的一侧缘处凸设有第一抵靠板3628c。可选地,第一抵靠板3628c垂直于第一凸耳3624c及第一侧板3622c。第二凸耳3625c的一侧缘处凸设有第二抵靠板(图未示)。可选地,第二抵靠板垂直于第二凸耳3625c及第二侧板3623c。第一抵靠板3628c与第二抵靠板位于同一侧,用于与抵杆配合,在通过调节槽与固定螺栓的配合将传动带与带轮的张紧程度调节至合适的张紧程度后,使得传动带与带轮的张紧程度保持在该合适的张紧程度。
机臂连接件30c组装完成后,电机安装座362c的第一抵靠板3628c及第二抵靠板分别与凸块3132c相对设置。安装在凸块3132c上的抵杆用于在通过调节槽与固定螺栓的配合将传动带与带轮的张紧程度调节至合适的张紧程度后,与抵靠板配合使得传动带与带轮的张紧程度保持在该合适的张紧程度。
传动组件37c与机臂驱动装置36c传动连接。本实施例中,传动组件37c与第一传动轮363c传动连接。
本实施例中,传动组件37c为拨轮组件。传动组件37c包括拨轮371c及与拨轮371c固定连接的第二传动轮373c。本实施例中,拨轮371c与第二传动轮373c通过固定螺钉固定连接。可以理解,其他实施例中,拨轮371c也可以与第二传动轮373c一体成型,本申请对此不做限定。
拨轮371c包括本体3711c及自本体3711c外缘凸设的拨杆3713c。本体3711c开设有用于与固定螺钉配合,以实现与第二传动轮373c固定连接的螺孔。
本实施例中,拨轮371c包括两个沿本体3711c外缘间隔设置的拨杆3713c。拨杆3713c的延伸方向平行于拨轮371c的轴向。本实施例中,拨杆3713c自本体3711c的外缘沿本体3711c的径向向外凸设且拨杆的延伸方向平行于拨轮371c的轴向。可选地,两个拨杆3713c与拨轮371c的轴心的连线所成的夹角为120°。
第二传动轮373c与第一传动轮363c传动连接,且与拨轮371c固定连接。第二传动轮373c的直径可以例如大于第一传动轮363c的直径,且小于或等于拨轮371c(的本体3711c)的直径。本实施例中,第一传动轮363c及第二传动轮373c均为带轮。第一传动轮363c与第二传动轮373c通过传动带连接。通过传动带传动,可以实现大中心距的传动,使机臂连接件30c具备抗冲击性。
可以理解,其他实施例中,第一传动轮363c及第二传动轮373c也可以均为齿轮且第一传动轮363c与第二传动轮373c啮合,本申请对此不做限定,只要第一传动轮363c在机臂驱动装置361c的驱动下能够带动第二传动轮373c转动,进而带动拨轮371c转动即可。
本实施例中,传动组件37c还可以包括拨轮轴375c。拨轮轴375c的相对两端分别设置在第二连接孔3115c及第四连接孔内。本实施例中,拨轮轴375c的相对两端分别与第二连接孔3115c及第四连接孔固定连接。拨轮371c及第二传动轮373c套设在拨轮轴375c上,通过该拨轮轴375c连接至上压板311c及下压板313c。
可以理解,为便于第二传动轮373c及拨轮371c的转动,传动组件37c还可以包括设置在拨轮371c与拨轮轴375c之间和/或设置在第二传动轮373c与拨轮轴375c之间的轴承。
第一机臂固接件33c与机臂组件20的机臂21的一端固定连接,且第一机臂固接件33c与对应的传动组件37c的拨轮371c传动连接。第二机臂固接件35c与另一机臂组件20的机臂21的一端固定连接,且与对应的传动组件37c的拨轮371c传动连接。
本实施例中,机臂固接件与机臂之间的连接可通过螺钉与螺孔配合的方式实现。可以理解,其他实施例中机臂固接件(第一机臂固接件33c及第二机臂固接件35c)可以与机臂一体成型,并通过连接轴(第一连接轴32c及第二连接轴34c)与机身固接件31c可转动地连接。
第一机臂固接件33c为槽轮。本实施例中,第一机臂固接件33c包括自第一机臂固接件33c的外缘向第一机臂固接件33c的内部沿第一机臂固接件33c的径向开设的槽道331c,及沿第一机臂固接件33c外缘设置的至少两个弧形部333c。槽道331c位于相邻的两个弧形部333c之间。弧形部333c所在圆的半径与对应的传动组件37c的拨轮371c的本体3711c的半径相同。本实施例中,槽道331c的数量为两个,相应的弧形部333c的数量为三个。每个弧形部333c所对的圆心角与两个拨杆3713c与拨轮371c的轴心的连线所成的夹角相同(本实施例中,为120°)。第一机臂固接件33c通过槽道331c与对应的传动组件37c的拨杆3713c的配合,实现与传动组件37c的拨轮371c的传动连接。
第二机臂固接件35c也为槽轮,且具有与第一机臂固接件33c相同的结构。相应地,第二机臂固接件35c包括自第二机臂固接件35c的外缘向第二机臂固接件35c的内部沿第二机臂固接件35c的径向开设的槽道351c,及沿第二机臂固接件35c外缘设置的至少两个弧形部353c。槽道351c位于相邻的两个弧形部353c之间。弧形部353c所在圆的半径与对应的传动组件37c的拨轮371c的本体3711c的半径相同。本实施例中,槽道351c的数量为两个,相应的弧形部353c的数量为三个。每个弧形部353c所对的圆心角与对应的传动组件37c的两个拨杆3713c与拨轮371c的轴心的连线所成的夹角相同(本实施例中,为120°)。第二机臂固接件35c通过槽道351c与对应的传动组件37c的拨杆3713c的配合,实现与传动组件37c的拨轮371c的传动连接。
可以理解,为便于第一机臂固接件33c及第二机臂固接件35c的转动,还可以在第一机臂固接件33c与第一连接轴32c之间及第二机臂固接件35c与第二连接轴34c之间设置轴承。
请参照图32,下面以第一机臂固接件33c与对应的传动组件37c的拨轮371c的配合为例,对拨轮371c与机臂固接件之间的配合过程进行介绍。
初始状态下,第一机臂固接件33c所连接的机臂组件20处于折叠状态(对应图32中的状态1),拨轮371c的本体3711c的外缘与第一机臂固接件33c左侧的弧形部333c耦合,拨轮371c的右侧拨杆3713c(为便于描述,以下简称,右侧拨杆)位于第一机臂固接件33c的左侧弧形部333c与中间弧形部333c之间的槽道331c(为便于描述,以下简称,第一槽道)的槽口处。当电机361c驱动第一传动轮363c转动,第一传动轮363c带动第二传动轮373c转动进而带动拨轮371c沿逆时针方向转动时,右侧拨杆沿第一槽道滑入,并通过与第一槽道的槽壁的相互作用带动第一机臂固接件33c沿顺时针方向转动(对应图32中的状态2)。右侧拨杆随着拨轮371c的转动逐渐滑至第一槽道靠近第一机臂固接件33c轴心,此时,若拨轮371c在第二传动轮373c的带动下继续沿逆时针方向转动,右侧拨杆将沿远离第一机臂固接件33c的轴心的方向顺着第一槽道滑回至第一槽道的槽口。当右侧拨杆滑回至第一槽道的槽口时,拨轮的左侧拨杆3713c到达槽轮的中间弧形部333c与右侧弧形部333c之间的槽道331c(为便于描述,以下简称第二槽道)的槽口,本体3711c位于两个拨杆3713c之间的劣弧外缘与中间弧形部333c耦合(对应图32中的状态3)。此时,若拨轮371c在第二传动轮373c的带动下继续沿逆时针方向转动,左侧拨杆滑入第二槽道并带动第一机臂固接件33c继续沿顺时针方向转动。左侧拨杆随着拨轮371c的转动逐渐滑至第二槽道靠近第一机臂固接件33c轴心,此时,若拨轮371c在第二传动轮373c的带动下继续沿逆时针方向转动,左侧拨杆将沿远离第一机臂固接件33c的轴心的方向顺着第二槽道滑回至第二槽道的槽口,本体3711c位于两个拨杆3713c之间的优弧外缘与右侧弧形部333c配合(对应图32中的状态4)。此时,若拨轮371c继续转动,由于拨杆3713c(包括左侧拨杆及右侧拨杆)未与槽道331c包括第一槽道及第二槽道)配合,拨轮371c空转(对应图32中的状态5),并不会带动第一机臂固接件33c继续转动(即,实现第一机臂固接件33c的周向锁死)。此时,第一机臂固接件33c所连接的机臂组件保持在展开状态。第一机臂固接件33c所连接的机臂组件由展开状态转换为折叠状态的过程则与上述过程相反,在此不再赘述。
第二机臂固接件35c与对应的传动组件37c的拨轮371c的配合过程与上述过程相同,在此不再赘述。
可以理解,机臂固接件(第一机臂固接件33c及第二机臂故借鉴35c)可转动的角度范围与拨轮371c的拨杆3713c数量相关,本领域技术人员可根据需要进行设计,本申请对此不做限定。
可以理解,其他实施例中,第一机臂固接件33c与第一连接轴32c可以一体成型。第二机臂固接件35c与第二连接轴34c可以一体成型。
本申请实施例提供的机臂连接件,通过机臂驱动装置36c驱动传动组件37c转动,从而带动第一机臂固接件33c及与第一机臂固接件33c固定连接的机臂组件20,或第二机臂固接件35c及与第二机臂固接件35c固定连接的机臂组件20转动,使得机臂组件20展开或收拢,由此,可使得机臂组件20在使用时展开,在不使用时收拢,方便无人机的收纳。
请一并参阅图33及图34。本申请实施例还提供一种无人机100包括机身101及前述机臂连接件30及前述机臂组件20。无人机100可以是无人飞行器,无人船等。本实施例中,无人机100为飞行摩托。本实施例中,无人机100包括两个前述机臂连接件30及四个前述机臂组件20。可以理解,无人机100所包括的机臂连接件30的数量及机臂组件20的数量并不以此为限,还可以根据需要设计成其他数量,只要满足机臂组件20的数量为机臂连接件30的数量的两倍即可。
机身101包括用于与机臂连接件30连接的连接部1011。本实施例中,连接部1011的数量为两个,一个连接部1011设置在摩托车的脚踏板靠近前轮的位置,另一个连接部1011位于摩托车的车座下方,且靠近车头设置。两个连接部1011的结构大致相同。连接部1011沿摩托车车身(机身101)的宽度方向开设有一个连接孔1012,用于供机臂连接件30穿设。本实施例中,连接孔1012为方形孔。
机臂连接件30与机身101固定连接。可以理解,机臂连接件30与机身101之间的固定连接可以通过螺钉与螺孔的配合来实现,具体如何配合本申请不做限定。本实施例中,机臂连接件30与连接部1011一一对应。机臂连接件30穿设在与之对应的连接部1011的连接孔1012中。
本实施例中,上压板311与下压板313均穿设在连接孔1012中,且分别与连接孔1012的顶壁和底壁固定连接,进而使机身固接件31与机身101固定连接。
本实施例提供的无人机100,当机臂驱动装置36驱动与第一机臂固接件33及第二机臂固接件35固接的机臂组件20折叠收拢时,机臂组件20收纳在无人机100的两侧,因此,可以减小无人机100所占用的空间。
在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
以上所述仅为本申请的实施例而已,并不用于限制本申请的保护范围,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 动力组件,机臂组件,机臂连接件及无人机
- 一种机臂支撑组件、无人机机臂及无人机