基于模型的体积云生成的方法
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及手游技术领域,特别涉及一种基于模型的体积云生成的方法。
背景技术
目前,当下手机游戏发展迅猛,手游市场的受众在迅速扩展,人们对游戏渲染画面真实性也越来越挑剔,经常拿手游的画面跟PC/主机端进行比较。
体积云就是一项经常出现在3A作品里的关键渲染技术,它给游戏里的云雾渲染带来了体积层次感。然而这项技术使用了大量的3D纹理和Compute Shader计算指令,异常耗费硬件性能,以目前的移动端硬件性能,几乎无法完成大部分手机系统的适配。所以到目前为止,市面上的手机游戏都几乎没有应用真正体积云技术的出现。但是在室外真实性渲染中,体积云是避不开的一个要素,因此产生了很多移动端模拟体积云的技术方案,比如视差映射方法和半透明面片穿插方法,但是这些方法产生出来的云效都不具有通用性,视差映射云只在特定角度才能体现体积感,其它角度观察平平无奇,半透明面片交叉无法实现任意形状的云效果。
发明内容
本发明提供一种基于模型的体积云生成的方法,以解决上述背景技术出现的问题。
本发明基于模型的体积云生成的方法,其特征在于,包括以下步骤:
步骤S1:获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型;
步骤S2:基于预设的游戏开发引擎,获取虚拟的相机组件,并根据所述相机组件,捕获基底体积云模型的第一法线和深度信息,并传输到预设的渲染目标贴图中;其中,
所述相机组件是游戏开发引擎中核的SceneCapture组件,是一个三维相机组件;
所述法线和深度信息是基底体积云模型光栅化到屏幕后的每个像素的着色属性;
步骤S3:对所述法线和深度信息进行模糊屏幕后处理,获取第二法线和深度信息;
步骤S4:应用所述第二法线和深度信息到预设的噪声贴图,并获取层次云模型;
步骤S5:输入所述法线和深度信息第二法线和深度信息到层次云模型上,确定层次体积云,通过预设的合成算法对所述层次体积云进行合成,生成合成体积云,并传输所述合成体积云至目标输出贴图上,确定合成体积云贴图;
步骤S6:将合成体积云贴图输出到终端屏幕上,与预设的场景进行叠加和渲染,获取目标渲染体积云。
优选的,所述获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型,包括:
获取并采集基底模型的边缘轮廓,并根据所述边缘轮廓,确定形状云参数;其中,
所述形状云参数至少包括基底模型边缘轮廓的弧度、周长、面积、拐点和角度;
根据所述形状云参数,确定基底云参数;其中,
所述基地云参数表示多尺度和多维度下的形状参数;
通过所述基底云参数,计算基地云体积,并基于所述基底模型和基底云体积,生成基底体积云。
优选的,所述获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型,包括:
步骤SS1:以基底模型的质心为原点;
其中,所述ρ(x,y,z)代表基底模型的密度,x代表横轴上采集到的横坐标,y代表纵轴上采集到的纵坐标,z代表纵轴上采集到的竖坐标,o代表以基底模型的质心为原点的原点,
步骤SS2:根据所述原点,采集并记录不同纬度的形状云长度;
其中,t
步骤SS3:获取基底模型的形状云参数,对形状云长度进行处理,并建立基底体积云模型。
优选的,所述基于预设的游戏开发引擎,获取虚拟的相机组件,并根据所述相机组件,捕获基底体积云模型的第一法线和深度信息,法线和深度信息,并传输到预设的渲染目标贴图中,包括:
获取预设的游戏开发引擎的相机组件,并根据所述相机组件,确定相机组件的帧数;
基于所述帧数,捕捉每帧基底模型光栅化到屏幕的像素;
对所述像素进行着色计算,确定着色数据,并根据所述像素和着色数据,确定着色信息;
根据所述着色信息,确定基底模型的第一法线和深度信息,并将所述第一法线和深度信息传输至单独的渲染目标贴图上;其中,
所述渲染目标贴图是一张可输入/输出信息的渲染目标贴图。
优选的,所述对所述法线和深度信息进行模糊屏幕后处理,获取法线和深度信息第二法线和深度信息,包括:
对所述法线和深度信息进行模糊屏幕后处理,并获取云合成信息;
根据所述云合成信息,确定模糊后的柔和云轮廓;
根据所述柔和云轮廓,确定处理云模型,并根据所述处理云模型,获取处理云模型的法线和深度信息第二法线和深度信息。
优选的,所述对所述法线和深度信息进行模糊屏幕后处理,包括:
获取目标像素点,并采集所述目标像素点周围固定的相邻像素点;
获取所述目标像素点和相邻像素点的像素,计算像素平均值;
根据所述像素平均值,对所述法线和深度信息进行模糊屏幕后处理;其中,
所述模糊屏幕后处理包括横向模糊和竖直模糊。
优选的,所述应用所述法线和深度信息第二法线和深度信息到预设的噪声贴图,并获取层次云模型,包括:
获取GPU上预设的噪声贴图,通过预设的时间参数对所述噪声贴图进行采样,生成随机数值;其中,所述随机数值用于叠加到柔和轮廓后的处理云模型上进行层次化叠加;
将所述随机数值叠加在法线和深度信息第二法线和深度信息上,获取离散信息数据;
获取处理云模型的柔和云轮廓,利用所述离散信息数据干扰柔和云轮廓,并基于处理云模型,生成层次云模型。
优选的,所述获取GPU上预设的噪声贴图,通过预设的时间参数对所述噪声贴图进行采样,生成随机数值,包括以下步骤:
步骤A1:通过预设的时间参数对所述噪声贴图进行随机采样,确定采样样本的范围:
其中,F(T,V)代表在时间参数T的情况下随机采样的采样样本的范围,T代表时间参数,T
步骤A2:通过随机采样样本的范围,确定随机采样的概率:
其中,p
步骤A3:基于所述范围和概率分布,确定损失函数;
其中,L代表损失函数,μ代表正则因子;
步骤A4:判断所述损失函数是否超过预设损失阈值,并确定判断结果;
其中,所述ρ代表判断结果,L
步骤A5:当所述判断结果为损失函数大于预设损失阈值时,即ρ<ε||ρ>ε时,给ρ的反馈指令赋值为0,并删除所述采样样本,对采样样本的相邻区域进行采样;
步骤A6:当所述损失函数小于预设损失阈值时,即ρ∈(ε,1),基于所述采样样本,生成随机数值。
优选的,所述输入所述法线和深度信息第二法线和深度信息到层次云模型上,确定层次体积云,通过预设的合成算法对所述层次体积云进行合成,生成合成体积云,包括:
输入所述法线和深度信息第二法线和深度信息到层次云模型上,并生成对应的第二层次云模型;
将所述层次云模型传输至预设的GPU进行图形处理,确定层次体积云;
基于预设的合成算法,叠加所述第二层次体积云,确定叠加云模型;
处理所述叠加云模型,并生成合成体积云。
优选的,所述将体积云贴图输出到终端屏幕上,与预设的场景进行叠加和渲染,获取目标渲染体积云,包括:
将体积云贴图输出到终端屏幕上,确定展示模型;
获取预设的场景,并将所述展示模型在预设的场景上进行预处理,确定处理结果;其中,
所述预处理包括叠加处理和渲染处理;
对所述处理结果进行除噪、孤立和过滤,然后进行色彩加深,确定目标处理数据;
融合所述目标处理结果和展示模型,确定目标渲染体积云。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
在附图中:
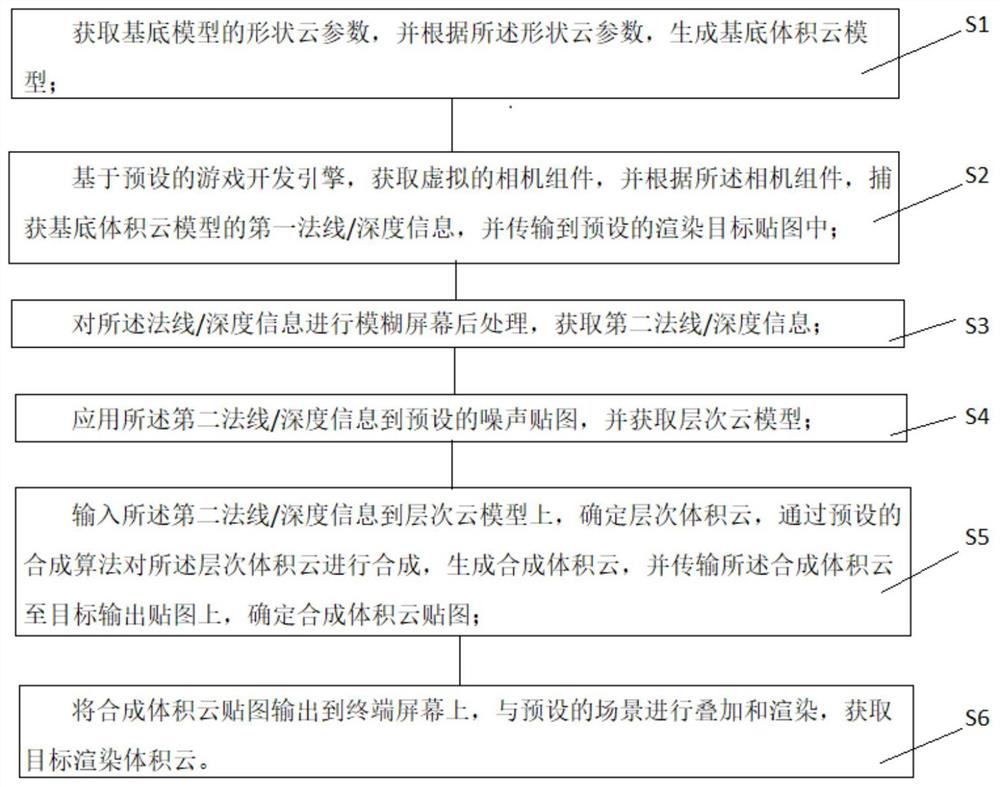
图1为本发明实施例中一种基于模型的体积云生成的方法方法流程模块附图;
图2为本发明实施例中一种基于模型的体积云生成的方法噪声贴图的实施例附图;
图3为本发明实施例中一种基于模型的体积云生成的方法实施例附图;
图4为本发明实施例中一种基于模型的体积云生成的方法方案成果展示的实施例附图;
图5为本发明实施例中一种基于模型的体积云生成的方法方案成果展示的实施例附图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
实施例1:
根据图1所示,本发明基于模型的体积云生成的方法,其特征在于,包括以下步骤:
步骤S1:获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型;
步骤S2:基于预设的游戏开发引擎,获取虚拟的相机组件,并根据所述相机组件,捕获基底体积云模型的第一法线和深度信息,并传输到预设的渲染目标贴图中;其中,
所述相机组件是游戏开发引擎中核的SceneCapture组件,是一个三维相机组件;
所述法线和深度信息是基底体积云模型光栅化到屏幕后的每个像素的着色属性;
步骤S3:对所述法线和深度信息进行模糊屏幕后处理,获取第二法线和深度信息;
步骤S4:应用所述第二法线和深度信息到预设的噪声贴图,并获取层次云模型;
步骤S5:输入所述法线和深度信息第二法线和深度信息到层次云模型上,确定层次体积云,通过预设的合成算法对所述层次体积云进行合成,生成合成体积云,并传输所述合成体积云至目标输出贴图上,确定合成体积云贴图;
步骤S6:将合成体积云贴图输出到终端屏幕上,与预设的场景进行叠加和渲染,获取目标渲染体积云。
上述技术方案的工作原理在于:
本发明实施例提供了基于模型的体积云生成的方法,通过获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型,建模师制作任意形状的模型作为生成体积云的基底;基于预设的虚幻4引擎的SceneCapture组件,捕获基底体积云模型的法线和深度信息到预设的渲染目标贴图;其中,所述法线和深度信息是基底体积云模型光栅化到屏幕后的每个像素的着色属性,通过虚幻4引擎的SceneCapture组件(一个虚拟的三维相机)每帧捕获模型的法线和深度信息(法线/深度是模型光栅化到屏幕后的每个像素的着色属性,用来参与像素的着色计算)到单独的渲染目标贴图(一张可输入输出信息的渲染目标贴图,前面的SceneCapture组件把模型的信息输出到这里)上;对所述法线和深度信息进行模糊屏幕后处理,获取法线和深度信息第二法线和深度信息;对第二步得到的法线和深度信息进行模糊屏幕后处理,各执行横向模糊和竖直模糊一次,模糊的目的是产生云合成信息的柔和轮廓,这里的模糊技术采用了采样目标像素点周围固定位置的一些相邻像素点,进行相加取平均值的方法;对所述法线和深度信息第二法线和深度信息应用预设的噪声贴图,获取层次云模型;如附图2所示,其图上灰色的地方,在实际实施时,应该是绿色和蓝色,这个颜色代不同饱和度的云层表,其图上深黑色的地方,在实际实施时,应该是红色和紫色,绿色和蓝色呈现出的叠加状态呈红色,代表绿色和蓝色呈现出的渲染状态呈紫色,附图2主要是对第三步的深度信息应用一张固定的噪声贴图(噪声贴图是用来在GPU上制作随机数值的工具),通过用时间作为参数采样噪声图,用得到的随机数值叠加在原深度信息上,干扰深度信息的连续性,使得第五步合成出来的云有层次感,附图2中的黑灰颜色的区域代表对法线和深度信息进行噪声贴图后呈现出的红蓝绿紫交杂的云层;如附图3所示,其图上灰色的地方,在实际实施时,应该是绿色,这个颜色代表模糊技术后处理了的云层,其图上深黑色的地方,在实际实施时,应该是轮廓和层次更加清晰的蓝色,这个颜色代表对模糊技术后处理了的云层进行GPU上的屏幕合成程序生成体积云的叠加,轮廓和层次更加清晰的云层,附图3主要输入所述法线和深度信息,基于预设的合成算法,生成体积云到目标输出贴图上;应用前面步骤处理后的法线和深度信息作为输入,用专门编写的GPU上的屏幕合成程序生成体积云到目标输出贴图上,将体积云贴图输出到终端屏幕上;如附图4所示,其图上深黑色和深灰色的地方,在实际实施时,是黑颜色和深蓝色,这个颜色代表游戏中的虚拟人物所处的虚拟场景,其图上白色和浅灰色的地方,在实际实施时,也是白色和浅灰色,这个颜色代表将图3中的云与预设的场景进行叠加和渲染,并贴图输出到屏幕上,获取的目标渲染体积云,如附图5所示,其图上深黑色的地方,在实际实施时,应该是蓝颜色,这个颜色代表山脉及山峰,其图上白灰的地方,在实际实施时,也是白灰,这个颜色代表云层。
上述技术方案的有益效果在于:。
本技术方案提供基于模型的体积云,通过生成一套模拟体积云渲染方案,在手机平台能顺利部署和高速运行,不仅给游戏里的云雾渲染带来了体积层次感,减少耗费硬件性能,完成大部分手机系统的适配,产生了具有通用性移动端模拟体积云的技术方案,在不同角度体现体积感,实现任意形状的云效果,如图4和图5所示,将这些云与预设的场景进行叠加和渲染,获取目标渲染体积云;最后需要把体积云贴图输出到屏幕上,与本来的场景渲染结果进行叠加,就产生了带体积云的渲染效果,图4主要呈现了在游戏中虚拟人物头顶三维云朵的效果,是一个具有空间感的仿真云层,在图4中的云中,白灰相间的云呈现出立体交错的空间状,并漂浮在白色小人的头顶斜上空,图5主要呈现了在游戏中山顶的云层,主要表现的云的层次感,主要漂浮在山顶上方,通过将白色的云悬浮在山顶上,模拟真实的云层效果。
实施例2:
本技术方案提供了一种实施例,所述获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型,包括:
获取并采集基底模型的边缘轮廓,并根据所述边缘轮廓,确定形状云参数;其中,
所述形状云参数至少包括基底模型边缘轮廓的弧度、周长、面积、拐点和角度;
根据所述形状云参数,确定基底云参数;其中,
所述基地云参数表示多尺度和多维度下的形状参数;
通过所述基底云参数,计算基地云体积,并基于所述基底模型和基底云体积,生成基底体积云。
上述技术方案的工作原理在于:
本技术方案通过获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云,基底模型是建模师任意选择想要用来作为基底的模型,获取并采集基底模型的边缘轮廓,并根据所述边缘轮廓,确定形状云参数,确定整个基底模型的云形状,并生成整片云的形状参数,根据所述形状云参数,确定基底云参数,基地云参数是处理过后的形状云参数,它包括不同角度的数据抽取,从而确定三维的基地云的形状参数,通过所述基底云参数,经过移动端的处理系统的整合计算,计算出基地云体积,并基于所述基底模型和基底云体积,生成基底体积云,基地体积云是基底模型和体积融合,形成三维的云的效果。
上述技术方案的有益效果在于:
本技术方案通过对获取基底模型的处理计算,生成基底体积云模型,生成精确的基底模型,可以满足建模师在不同形状的图案模型作为基地模型,更惟妙惟肖的模仿体积云的效果。
实施例3:
本技术方案提供了一种实施例,所述获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型,包括:
步骤SS1:以基底模型的质心为原点;
其中,所述ρ(x,y,z)代表基底模型的密度,x代表横轴上采集到的横坐标,y代表纵轴上采集到的纵坐标,z代表纵轴上采集到的竖坐标,o代表以基底模型的质心为原点的原点,
步骤SS2:根据所述原点,采集并记录不同纬度的形状云长度;
其中,t
步骤SS3:获取基底模型的形状云参数,对形状云长度进行处理,并建立基底体积云模型。
上述技术方案的工作原理在于:
本技术方案提供了一种实施例,通过获取基底模型的形状云参数,并根据所述形状云参数,生成基底体积云模型,首先以基底模型的质心为原点o,通过对基底模型的密度计算,并通过积分原理进行计算质心,以任意的空间两两垂直的三条轴线作为三维空间的轴线支点线,采集x轴上的x轴数据、y轴上的y轴数据和z轴上的z轴数据;然后根据原点,采集并记录不同纬度的形状云长度,通过记录不同时刻,不同空间纬度下的形状云长度,获取基底模型的形状云参数,对形状云长度进行处理,并建立基底体积云模型。
上述技术方案的有益效果在于:
通过对质心的计算,更方便的提供了基地体积云的计算,并记录不同纬度的云长度的参数,便于修改或者渲染和添加体积云,提供了精确的原始数据。
实施例4:
本技术方案提供了一种实施例,所述基于预设的游戏开发引擎,获取虚拟的相机组件,并根据所述相机组件,捕获基底体积云模型的第一法线和深度信息,法线和深度信息,并传输到预设的渲染目标贴图中,包括:
获取预设的游戏开发引擎的相机组件,并根据所述相机组件,确定相机组件的帧数;
基于所述帧数,捕捉每帧基底模型光栅化到屏幕的像素;
对所述像素进行着色计算,确定着色数据,并根据所述像素和着色数据,确定着色信息;
根据所述着色信息,确定基底模型的第一法线和深度信息,并将所述第一法线和深度信息传输至单独的渲染目标贴图上;其中,
所述渲染目标贴图是一张可输入/输出信息的渲染目标贴图。
上述技术方案的工作原理在于:
本技术方案基于预设的虚幻4引擎的SceneCapture组件,捕获模型的法线和深度信息到单独的渲染目标贴图,SceneCapture组件是一个虚拟的三维相机,获取预设的虚幻4引擎的SceneCapture组件的帧数;根据所述帧数,捕捉每帧基底模型光栅化到屏幕的像素;对所述像素进行着色计算,确定着色数据,并根据所述像素和着色数据,确定着色信息;根据所述着色信息,确定基底模型的法线和深度信息,并将所述法线和深度信息传输至单独的渲染目标贴图上;所述渲染目标贴图是一张可输入/输出信息的渲染目标贴图,法线/深度是模型光栅化到屏幕后的每个像素的着色属性,用来参与像素的着色计算,渲染目标贴图是一张可输入输出信息的渲染目标贴图,前面的SceneCapture组件把模型的信息输出到这里。
上述技术方案的有益效果在于:
本技术方案通过对基底体积云模型进行处理,利用着色信息可以对基底云进行渲染,从而使基底体积云更丰盈,色彩更丰富。
实施例5:
本技术方案提供了一种实施例,所述对所述法线和深度信息进行模糊屏幕后处理,获取法线和深度信息第二法线和深度信息,包括:
对所述法线和深度信息进行模糊屏幕后处理,并获取云合成信息;
根据所述云合成信息,确定模糊后的柔和云轮廓;
根据所述柔和云轮廓,确定处理云模型,并根据所述处理云模型,获取处理云模型的法线和深度信息第二法线和深度信息。
上述技术方案的工作原理和有益效果在于:
本技术方案通过对所述法线和深度信息进行模糊屏幕后处理,获取法线和深度信息第二法线和深度信息,首先对所述法线和深度信息进行模糊屏幕后处理,并获取云合成信息;其中,所述模糊屏幕后处理包括横向模糊和竖直模糊;根据所述合成信息,确定模糊后的柔和云轮廓;根据所述柔和云轮廓,确定处理云模型,并根据所述处理云模型,获取法线和深度信息第二法线和深度信息,对云层进行处理,主要是为层次云提供原始数据。
实施例6:
本技术方案提供了一种实施例,所述对所述法线和深度信息进行模糊屏幕后处理,包括:
获取目标像素点,并采集所述目标像素点周围固定的相邻像素点;
获取所述目标像素点和相邻像素点的像素,计算像素平均值;
根据所述像素平均值,对所述法线和深度信息进行模糊屏幕后处理;其中,
所述模糊屏幕后处理包括横向模糊和竖直模糊。
上述技术方案的工作原理和有益效果在于:
本技术方案通过对所述法线和深度信息进行模糊屏幕后处理,通过获取目标像素点,并采集所述目标像素点周围固定的相邻像素点,获取所述目标像素点和相邻像素点的像素,计算像素平均值,根据所述像素平均值,对所述法线和深度信息进行模糊屏幕后处理,通过计算像素的平均值,可以均匀晕染不同部位的像素点,从而达到处理的图像更好看,云仿真的效果更真实,色彩更鲜艳。
实施例7:
如图2和图3所示,本技术方案提供了一种实施例,所述应用所述法线和深度信息第二法线和深度信息到预设的噪声贴图,并获取层次云模型,包括:
获取GPU上预设的噪声贴图,通过预设的时间参数对所述噪声贴图进行采样,生成随机数值;其中,所述随机数值用于叠加到柔和轮廓后的处理云模型上进行层次化叠加;
将所述随机数值叠加在法线和深度信息第二法线和深度信息上,获取离散信息数据;
获取处理云模型的柔和云轮廓,利用所述离散信息数据干扰柔和云轮廓,并基于处理云模型,生成层次云模型。
上述技术方案的工作原理和有益效果在于:
本技术方案通过对所述法线和深度信息第二法线和深度信息应用预设的噪声贴图,获取层次云模型,首先获取GPU上预设的噪声贴图,如附图2所示,噪声图是用来在GPU上制作随机数值的工具,GPU是图形处理器,又称显示核心、视觉处理器、显示芯片,是一种专门在个人电脑、工作站、游戏机和一些移动设备(如平板电脑、智能手机等)上做图像和图形相关运算工作的微处理器,通过预设的时间参数对所述噪声贴图进行采样,生成随机数值,随机数值是在噪声贴图上采样到的云模型数据,将所述随机数值叠加在法线和深度信息第二法线和深度信息上,获取离散信息数据;获取处理云模型的柔和云轮廓,利用所述离散信息数据干扰柔和云轮廓,并基于处理云模型,生成层次云模型,如附图3所示,整个过程是为了使云模型呈现层次的效果,模拟真实的空中的云。
实施例8:
本技术方案提供了一种实施例,优选的,所述获取GPU上预设的噪声贴图,通过预设的时间参数对所述噪声贴图进行采样,生成随机数值,包括以下步骤:
步骤A1:通过预设的时间参数对所述噪声贴图进行随机采样,确定采样样本的范围:
其中,F(T,V)代表在时间参数T的情况下随机采样的采样样本的范围,T代表时间参数,T
步骤A2:通过随机采样样本的范围,确定随机采样的概率:
其中,p
步骤A3:基于所述范围和概率分布,确定损失函数;
其中,L代表损失函数,μ代表正则因子;
步骤A4:判断所述损失函数是否超过预设损失阈值,并确定判断结果;
其中,所述ρ代表判断结果,L
步骤A5:当所述判断结果为损失函数大于预设损失阈值时,即ρ<ε||ρ>ε时,给ρ的反馈指令赋值为0,并删除所述采样样本,对采样样本的相邻区域进行采样;
步骤A6:当所述损失函数小于预设损失阈值时,即ρ∈(ε,1),基于所述采样样本,生成随机数值。
上述技术方案的工作原理在于:
本技术方案通过获取GPU上预设的噪声贴图,通过预设的时间参数对所述噪声贴图进行采样,生成随机数值,但随机数值是基于贝叶斯网络以及概率分布的基础上获取的,首先预设的时间参数对所述噪声贴图进行随机采样,确定时间参数T的情况下随机采样的采样样本的范围F(T,V),并自动生成对噪声贴图进行随机采样的采样行为Q
上述技术方案的有益效果在于:
通过对随机采样的数值进行数据的损失概率值计算,尽量在随机采样的情况下,尽可能采集到优化的区域,从而使图片融合、渲染的更有层次,更逼真,也同时尽可能减少了采集到的空白区域或者异常区域。
实施例9:
本技术方案提供了一种实施例,所述输入所述法线和深度信息第二法线和深度信息到层次云模型上,确定层次体积云,通过预设的合成算法对所述层次体积云进行合成,生成合成体积云,包括:
输入所述法线和深度信息第二法线和深度信息到层次云模型上,并生成对应的第二层次云模型;
将所述层次云模型传输至预设的GPU进行图形处理,确定层次体积云;
基于预设的合成算法,叠加所述第二层次体积云,确定叠加云模型;
处理所述叠加云模型,并生成合成体积云。
上述技术方案的工作原理和有益效果在于:
本技术方案通过对所述法线和深度信息第二法线和深度信息应用预设的固定噪声贴图,获取层次云模型,包括获取GPU上预设的噪声贴图,通过预设的时间参数对所述噪声贴图进行采样,生成随机数值;将所述随机数值叠加在法线和深度信息第二法线和深度信息上,将随机的数值加到已经获取的法线和深度信息第二法线和深度信息上,会呈现不太融合的剥离感,所以需要获取离散信息数据;获取处理云模型的柔和云轮廓,整个过程仿真出云的柔和的轮廓和云的层次感,所以对层次和柔和需要两次处理,并对其进行范围或者度的设置,利用所述离散信息数据干扰柔和云轮廓,并基于处理云模型,生成层次云模型,更加的逼真。
实施例10:
本技术方案提供了一种实施例,所述将体积云贴图输出到终端屏幕上,与预设的场景进行叠加和渲染,获取目标渲染体积云,包括:
将体积云贴图输出到终端屏幕上,确定展示模型;
获取预设的场景,并将所述展示模型在预设的场景上进行预处理,确定处理结果;其中,
所述预处理包括叠加处理和渲染处理;
对所述处理结果进行除噪、孤立和过滤,然后进行色彩加深,确定目标处理数据;
融合所述目标处理结果和展示模型,确定目标渲染体积云。
上述技术方案的工作原理和有益效果在于:
本技术方案提供了将体积云贴图输出到终端屏幕上,与预设的场景进行叠加和渲染,获取目标渲染体积云的方案,通过将体积云贴图输出到终端屏幕上,确定展示模型;获取预设的场景,并将所述展示模型在预设的场景上进行预处理,确定处理结果;其中,所述预处理包括叠加处理和渲染处理;对所述处理结果进行除噪、孤立和过滤,然后进行色彩加深,确定目标处理数据;融合所述目标处理结果和展示模型,确定目标渲染体积云,最终经过渲染的三维下的云层不仅在游戏中使玩家更有体验感,整个画面流畅漂亮,并使得场景更加逼真,美丽,并在随机生成云的情况下,尽可能的减少异常数据的采集,提供了灵活的体积云生成。
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器和光学存储器等)上实施的计算机程序产品的形式。
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 基于模型的体积云生成的方法
- 体积云模拟方法和体积云模拟装置