机器人的移动装置及机器人
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及机器人技术领域,尤其是涉及一种机器人的移动装置及机器人。
背景技术
在挑战自然界的过程中,人类要尝试在各种复杂的环境中前进,然而受制于血肉之躯,不得不利用智慧创造工具。在未知的恶劣条件下,为了完成运输、抢险、侦查等多重任务,人类孜孜探寻着如何利用无人平台跨越各种障碍,同时搭载多种功能。移动机器人应运而生,其在运动行驶过程中需要用转向驱动装置来控制它的运动方式,由于面对的环境、承重范围、灵活性等要求均有不同,所以衍生出多种不同的运动模式,主要列举如下:
轮式机器人,利用轮子与地面的滚动产生的摩擦力推动整体进行运动,运动速度快、载重量大;但轮式机器人的地形适应能力差,只能在较为平整的路面上行驶;
履带式机器人,利用履带与地面的摩擦力推动整体进行运动,载重能力与轮式机器人基本相同,相较于轮式机器人,其地形适应能力更好,可以通过沙地、山地等复杂地形,适合野外工作环境;但履带式机器人的地形适应能力存在局限性,难以通过楼梯等存在较大高度差的地形;
足式机器人,对地形适应能力强,有良好的自由度,动作灵活;但足式机器人的运动速度较慢,效率较低,载重量小。
现有机器人的运动模式各具优缺点,如何让机器人兼具较高的地形适应能力、运动效率和较快的运动速度是机器人领域的研究热点。
发明内容
本发明实施例的目的是提供一种机器人的移动装置及机器人,其具有较高的速度、较好的地形适应能力和灵活性。
为了解决上述技术问题,本发明实施例提供一种机器人的移动装置,包括机架以及安装在所述机架上的至少二个轮足式运动组件;
每一所述轮足式运动组件均包括可折叠腿部和动力轮;所述可折叠腿部包括驱动装置、电机连接杆、辅助连接杆和足部连接杆,所述驱动装置安装在所述机架上;所述辅助连接杆的第一端与所述机架铰接,所述辅助连接杆的第二端与所述足部连接杆的第一端铰接,所述动力轮安装在所述足部连接杆的第二端;所述驱动装置的输出端与所述电机连接杆的第一端连接,所述电机连接杆的第二端铰接在所述足部连接杆的两端之间的杆身上。
作为优选方案,所述电机连接杆的第二端铰接在所述足部连接杆的中上部。
作为优选方案,所述辅助连接杆的第一端位于所述电机连接杆的第一端的右上方。
作为优选方案,所述驱动装置包括驱动电机,所述驱动电机安装在所述机架上,所述电机连接杆的第一端固定连接在所述驱动电机的输出轴上。
作为优选方案,所述可折叠腿部还包括减震装置,所述减震装置设于所述足部连接杆和电机连接杆之间。
作为优选方案,所述可折叠腿部还包括连接轴,所述电机连接杆通过所述连接轴与所述足部连接杆铰接;所述减震装置包括至少一个扭簧,所述扭簧套设在所述连接轴上,所述扭簧的第一端抵靠在所述电机连接杆上,所述扭簧的第二端抵靠在所述足部连接杆上。
作为优选方案,所述动力轮包括轮胎和轮毂电机,所述轮胎设于所述轮毂电机上,所述轮毂电机安装在所述足部连接杆的第二端。
作为优选方案,所述轮足式运动组件的数量为两个,两个所述轮足式运动组件设于所述机架的相对两侧上。
作为优选方案,所述机器人的移动装置还包括控制器,所述控制器分别与所述驱动装置和所述动力轮电连接。
为了解决相同的技术问题,本发明实施例还提供一种机器人,包括所述的机器人的移动装置。
相比于现有技术,本发明实施例的有益效果在于:本发明实施例提供了一种机器人的移动装置,其包括机架以及安装在所述机架上的至少二个轮足式运动组件;每一所述轮足式运动组件均包括可折叠腿部和动力轮,可折叠腿部包括驱动装置、电机连接杆、辅助连接杆和足部连接杆,辅助连接杆的第一端与机架铰接,辅助连接杆的第二端与足部连接杆的第一端铰接,动力轮安装在足部连接杆的第二端,机器人的移动装置通过使用轮式结构,能够具有较高的速度;而驱动装置安装在机架上,驱动装置的输出端与电机连接杆的第一端连接,电机连接杆的第二端铰接在足部连接杆的两端之间的杆身上,驱动装置提供驱动力,驱动电机连接杆、辅助连接杆、足部连接杆进行折叠或伸展,以使得机器人的移动装置能够改变自身高度,具有较好的地形适应能力和灵活性。同时,本发明实施例还相应地提供了一种机器人。
附图说明
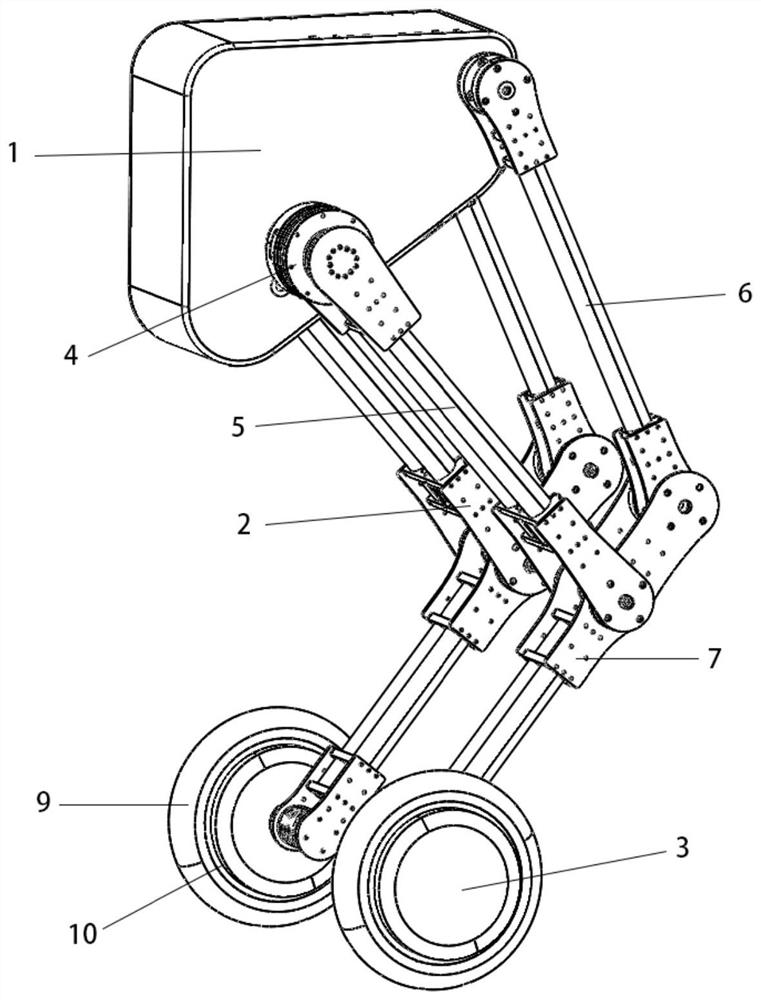
图1是本发明实施例中的机器人的移动装置的立体结构示意图;
图2是本发明实施例中的机器人的移动装置的侧视结构示意图;
图3是本发明实施例中的机器人的移动装置的正面结构示意图;
图4是本发明实施例中的机器人的移动装置的腿部收缩状态示意图;
图5是本发明实施例中的机器人的移动装置的腿部伸展状态示意图;
图6是本发明实施例中的机器人的移动装置在越障时的状态示意图;
图7是本发明实施例中的扭簧、连接轴、电机连接杆和足部连接杆之间的装配示意图;
图8是本发明实施例中的机器人的移动装置的腿部站立仿真示意图;
图9是本发明实施例中的机器人的移动装置的腿部收缩过程仿真示意图;
其中,1、机架;2、可折叠腿部;3、动力轮;4、驱动电机;5、电机连接杆;6、辅助连接杆;7、足部连接杆;8、扭簧;9、轮胎;10、轮毂电机;11、连接轴。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的说明中,上、下、左、右、前和后等方位以及顶部和底部的描述都是针对图2进行限定的,当机器人的移动装置的放置方式发生改变时,其相应的方位以及顶部和底部的描述也将根据放置方式的改变而改变,本发明在此不做赘述。
结合图1至图6所示,本发明实施例提供一种机器人的移动装置,其包括机架1以及安装在所述机架1上的至少二个轮足式运动组件;
每一所述轮足式运动组件均包括可折叠腿部2和动力轮3;所述可折叠腿部2包括驱动装置、电机连接杆5、辅助连接杆6和足部连接杆7,所述驱动装置安装在所述机架1上;所述辅助连接杆6的第一端与所述机架1铰接,所述辅助连接杆6的第二端与所述足部连接杆7的第一端铰接,所述动力轮3安装在所述足部连接杆7的第二端;所述驱动装置的输出端与所述电机连接杆5的第一端连接,所述电机连接杆5的第二端铰接在所述足部连接杆7的两端之间的杆身上。
在本发明实施例中,机器人的移动装置包括机架1以及安装在所述机架1上的至少二个轮足式运动组件;每一所述轮足式运动组件均包括可折叠腿部2和动力轮3,可折叠腿部2包括驱动装置、辅助连接杆6、足部连接杆7和电机连接杆5,辅助连接杆6的第一端与机架1铰接,辅助连接杆6的第二端与足部连接杆7的第一端铰接,动力轮3安装在足部连接杆7的第二端,机器人的移动装置通过使用轮式结构,能够具有较高的速度;而驱动装置安装在机架1上,驱动装置的输出端与电机连接杆5的第一端连接,电机连接杆5的第二端铰接在足部连接杆7的两端之间的杆身上,驱动装置提供驱动力,驱动电机连接杆5、辅助连接杆6、足部连接杆7进行折叠或伸展,以使得机器人的移动装置能够改变自身高度,具有较好的地形适应能力和灵活性。
在本发明实施例中,所述机架1、所述电机连接杆5、所述辅助连接杆6和足部连接杆7构成四连杆结构,并通过驱动装置提供驱动力,以实现机器人腿部站立、蹲下、起跳等动作,本发明实施例提供的移动装置使得机器人具有轮式机器人和足式机器人的复合移动功能,在保证运行速度和灵活性的同时,具有较高的稳定性和良好的地形适应能力,可以越过较高的障碍物,具有很大的竞争优势。
需要说明的是,安装本发明实施例提供的移动装置的机器人在保持直立运动的同时,可以通过可折叠腿部2的伸缩使机器人的重心上下运动。结合图8和图9所示,图8是本发明实施例中的机器人的移动装置的腿部站立仿真示意图,图9是本发明实施例中的机器人的移动装置的腿部收缩过程仿真示意图,由于与驱动装置连接的电机连接杆5铰接在足部连接杆7的两端之间的杆身上,因此使得当机器人在原地上下运动时,即在原地进行可折叠腿部2伸缩时,足部连接杆7的第二端的运动轨迹近似一条与地面垂直的直线,所以当机器人的高度发生改变时,能够使得机器人的重心保持在整体的中部,从而降低了机器人平衡控制的难度,进而提高了机器人在不同重心高度的稳定性。
在一种可选的实施方式中,请参阅图3所示,所述轮足式运动组件的数量为两个,两个所述轮足式运动组件设于所述机架1的相对两侧上。当然,所述轮足式运动组件可以根据实际使用要求设置为其他数量,在此不做赘述。
请参阅图2所示,在本发明实施例中,所述电机连接杆5的第二端铰接在所述足部连接杆7的中上部。所述辅助连接杆6的第一端位于所述电机连接杆5的第一端的右上方。所述电机连接杆5和所述辅助连接杆6的长度均大于所述辅助连接杆6的第一端与所述电机连接杆5的第一端之间的距离,所述辅助连接杆6的第一端与所述电机连接杆5的第一端之间的距离大于所述辅助连接杆6的第二端与所述电机连接杆5的第二端之间的距离。
请参阅图1所示,在一种可选的实施方式中,所述驱动装置包括驱动电机4,所述驱动电机4安装在所述机架1上,所述电机连接杆5的第一端固定连接在所述驱动电机4的输出轴上。由于所述电机连接杆5的第一端固定连接在所述驱动电机4的输出轴上,因此,当所述驱动电机4的输出轴转动时,可以带动整个可折叠腿部2进行折叠或伸展。
请参阅图3和图7所示,在一种可选的实施方式中,所述可折叠腿部2还包括减震装置,所述减震装置设于所述足部连接杆7和电机连接杆5之间。具体地,所述可折叠腿部2还包括连接轴11,所述电机连接杆5通过所述连接轴11与所述足部连接杆7铰接;所述减震装置包括至少一个扭簧8,所述扭簧8套设在所述连接轴11上,所述扭簧8的第一端抵靠在所述电机连接杆5上,所述扭簧8的第二端抵靠在所述足部连接杆7上。
在具体实施当中,传统的机器人容易受到地形影响而无法平稳移动,特别是面对复杂地形、不连续地形时,地形的复杂性会影响机器人执行任务,例如,若机器人需要通过摄像头开展探测任务时,传统的机器人在移动过程中容易受到地形影响导致摄像头严重晃动,从而影响摄像头拍摄。而本发明实施例提供的机器人的移动装置在所述足部连接杆7和电机连接杆5之间设置减震装置,例如,将扭簧8套设在连接轴11上,且扭簧8的两端分别抵靠在所述电机连接杆5和所述足部连接杆7上,从而能够有效减震,使得机器人能够平稳地移动,有利于机器人顺利执行任务。此外,当所述可折叠腿部2处于收缩状态时,所述扭簧8被压缩,当所述可折叠腿部2从收缩状态切换至伸展状态的过程中,所述扭簧8恢复原有状态,从而可以为所述可折叠腿部2提供伸展的动力,因此可以极大地减少所述驱动电机4所需的输出扭矩,因而用户可以选择动力更小的驱动电机,以减少机器人的整体运行功耗,并延长所述驱动电机4的使用寿命。
请参阅图1至图3所示,在一种可选的实施方式中,所述动力轮3包括轮胎9和轮毂电机10,所述轮胎9设于所述轮毂电机10上,所述轮毂电机10安装在所述足部连接杆7的第二端。所述轮毂电机10用于实现机器人的平衡、行进和转弯等动作。在具体实施当中,通过轮毂电机10为动力轮3提供驱动力,使得所述移动装置能够带动机器人快速移动,而控制机器人的转弯动作可以通过控制不同轮足式运动组件的动力轮3的差速和可折叠腿部2之间的高度差来实现,具体控制方法可采用现有技术来实现,在此不做更多的赘述。
在一种可选的实施方式中,可根据实际需要在所述动力轮3上安装其他设备,例如,可以在所述动力轮3上设置距离传感器和编码器,所述距离传感器用于测量动力轮3与障碍物的距离,所述编码器用于测量轮毂电机10的实际运行速度。
在一种可选的实施方式中,所述机器人的移动装置还包括控制器,所述控制器分别与所述驱动装置和所述动力轮3电连接。当然,也可以在机器人上设置主控制器,并通过机器人的主控制器直接控制驱动装置和动力轮3进行工作,在此不做更多的赘述。
在一种可选的实施方式中,可根据实际需要在所述机架1上安装其他设备,例如,可以在所述机架1上安装摄像头、姿态传感器模块等设备,通过控制器实现机器人的平衡、位置、速度和姿态控制,所述摄像头用于获取机器人所处环境的地形和图像信息,所述姿态传感器模块用于获取机器人姿态、速度数据。
为了解决相同的技术问题,本发明实施例还提供一种机器人,包括所述的机器人的移动装置。
相比于现有技术,本发明实施例的有益效果在于:本发明实施例提供了一种机器人的移动装置,其包括机架1以及安装在所述机架1上的至少二个轮足式运动组件;每一所述轮足式运动组件均包括可折叠腿部2和动力轮3,可折叠腿部2包括驱动装置、电机连接杆5、辅助连接杆6和足部连接杆7,辅助连接杆6的第一端与机架1铰接,辅助连接杆6的第二端与足部连接杆7的第一端铰接,动力轮3安装在足部连接杆7的第二端,机器人的移动装置通过使用轮式结构,能够具有较高的速度和效率,能降低系统控制的难度;而驱动装置安装在机架1上,驱动装置的输出端与电机连接杆5的第一端连接,电机连接杆5的第二端铰接在足部连接杆7的两端之间的杆身上,驱动装置提供驱动力,驱动电机连接杆5、辅助连接杆6、足部连接杆7进行折叠或伸展,以使得机器人的移动装置能够改变自身高度,具有较好的地形适应能力和灵活性。此外,由于与驱动装置连接的电机连接杆5铰接在足部连接杆7的两端之间的杆身上,因此使得当机器人在原地上下运动时,即在原地进行可折叠腿部2伸缩时,足部连接杆7的第二端的运动轨迹近似一条与地面垂直的直线,所以当机器人的高度发生改变时,能够使得机器人的重心保持在整体的中部,从而降低了机器人平衡控制的难度,进而提高了机器人在不同重心高度的稳定性。同时,本发明实施例还相应地提供了一种机器人。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以作出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
- 一种轮腿复合型的机器人移动装置及轮腿复合型机器人
- 一种用于等电位机器人的移动装置和等电位机器人