后端传动装置、医疗器械和手术机器人
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及医疗器械技术领域,具体而言涉及一种后端传动装置、医疗器械和手术机器人。
背景技术
在机器人辅助微创手术中,机器人末端连接的手术工具穿过人体表面的创口或者自然孔道进入人体,对人体内的组织进行操作。这种手术工具主要由位于前端的安装在腕部机构上的执行器或工具(例如手术钳、剪切工具或烧灼工具)、为前端提供多个自由度运动的腕部机构、从器械后端延伸到前端的主管路、以及器械后端的动力和传动装置几部分组成。前端执行器和腕部机构通常通过固定在其上的多跟线缆来驱动,这些线缆贯穿在手术工具的主管路内并由后端的动力和传动装置来驱动。
对于手术钳及其他夹持或剪切类工具,腕部机构通常需要实现俯仰、偏转和夹持三个自由度。其配合机器人后端所具有的额外的自由度,可以实现完成手术操作所需的运动。根据腕部机构的具体实现方式,其所需要的驱动线缆数量也有所不同(例如4根或6根)。通常,为了实现腕部机构各个关节的大范围运动(例如-90°到90°),需要在腕部机构上加装额外的滑轮以对线缆进行导向,但增加额外的滑轮等零件会阻碍手术器械前端的小型化。此外,使用更多的线缆也会增加器械尺寸和成本。
现有的驱动4线腕部的后端传动装置通过连杆或摇臂的摆动来实现两根线的释放和另外两根线的收紧,进而实现腕部的俯仰运动。使用这种方式时,随着俯仰角度的变化,收紧和释放的线缆长度并不相等,这将会导致线缆的松紧发生变化,可能会因线缆过松而产生间隙降低精度或线缆过紧而产生摩擦阻力过大加快磨损的问题。为了避免此问题的发生,可以限制俯仰关节的转角范围,但这将影响工具的功能。此外,使用这种机构时后端电机的输出端转角与腕部俯仰角成非线性关系,需要额外的标定工作以实现精确位置控制,增加了额外的工作量。
为此,本发明提供了一种后端传动装置、医疗器械和手术机器人,以至少部分地解决现有技术中的问题。
发明内容
在发明内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
为了至少部分地解决上述问题,本发明公开了一种后端传动装置,其包括:
第一转动件;
第二转动件;
第三转动件;
第一传动组件,所述第一传动组件用于分别连接第一线缆和第二线缆,并且分别连接至所述第一转动件和第三转动件;以及
第二传动组件,所述第二传动组件用于分别连接第三线缆和第四线缆,并且分别连接至所述第二转动件和第三转动件;
其中,所述第一转动件构造为可转动,以能够经由所述第一传动组件拉进所述第一线缆和所述第二线缆中的一者,同时释放所述第一线缆和所述第二线缆中的另一者,
所述第二转动件构造为可转动,以能够经由所述第二传动组件拉进所述第三线缆和所述第四线缆中的一者,同时释放所述第三线缆和所述第四线缆中的另一者,
所述第三转动件构造为可转动,以能够经由所述第一传动组件和所述第二传动组件实现:
拉进所述第一线缆和所述第二线缆中的至少一者,同时释放所述第三线缆和所述第四线缆中的至少一者,或者
拉进所述第三线缆和所述第四线缆中的至少一者,同时释放所述第一线缆和所述第二线缆中的至少一者。
根据本发明的后端传动装置,后端传动装置连接至例如腕部机构的四根驱动线缆,使得腕部机构与后端传动装置协作地工作,通过拉进或者释放驱动线缆(即第一线缆、第二线缆、第三线缆和第四线缆),以实现腕部机构的俯仰、偏转和夹握,这种驱动方式的结构简单,并且传动精确,转动件和腕部机构的俯仰、偏转和夹握角度成线性关系,并且在腕部机构的上述角度发生大范围变化时仍可以保证驱动线缆等长释放和/或拉进。
可选地,所述第一转动件绕第一中心轴线可转动,所述第二转动件绕第二中心轴线可转动,所述第三转动件绕第三中心轴线可转动,所述第一中心轴线平行于所述第二中心轴线,并且平行于所述第三中心轴线。
可选地,所述第一传动组件包括:
第一动滑轮,所述第一动滑轮用于连接所述第一线缆;
第一传动线缆,所述第一传动线缆绕过所述第一动滑轮,并且所述第一传动线缆的两端分别连接至所述第一转动件和所述第三转动件;
第二动滑轮,所述第二动滑轮绕第二轴可转动,所述第二动滑轮用于连接所述第二线缆;以及
第二传动线缆,所述第二传动线缆绕过所述第二动滑轮,并且所述第二传动线缆的两端分别连接至所述第一转动件和所述第三转动件;
其中,所述第一传动线缆绕所述第一转动件的缠绕方向和所述第二传动线缆绕所述第一转动件的缠绕方向相反,并且所述第一传动线缆绕所述第三转动件的缠绕方向与所述第二传动线缆绕所述第三转动件的缠绕方向相同;
所述第一转动件或所述第三转动件转动时,所述第一动滑轮在所述第一传动线缆的作用下移动,所述第二动滑轮在所述第二传动线缆的作用下移动。
可选地,所述第一传动组件还包括第一导向轮,所述第一传动线缆的位于所述第一转动件和所述第一动滑轮之间的部分绕过所述第一导向轮,使得所述第一传动线缆的位于所述第一导向轮和所述第一动滑轮之间的部分平行于所述第一传动线缆的位于所述第一动滑轮和所述第三转动件之间的部分。
可选地,所述第二传动线缆的位于所述第一转动件和所述第二动滑轮之间的部分平行于所述第二传动线缆的位于所述第二动滑轮和所述第三转动件之间的部分,并且平行于所述第一传动线缆的位于所述第一动滑轮和所述第三转动件之间的部分。
可选地,所述第二传动组件包括:
第三动滑轮,所述第三动滑轮用于连接所述第三线缆;
第三传动线缆,所述第三传动线缆绕过所述第三动滑轮,并且所述第三传动线缆的两端分别连接至所述第二转动件和所述第三转动件;
第四动滑轮,所述第四动滑轮绕第四轴可转动,所述第四动滑轮用于连接所述第四线缆;以及
第四传动线缆,所述第四传动线缆绕过所述第四动滑轮,并且所述第四传动线缆的两端分别连接至所述第二转动件和所述第三转动件;
其中,所述第三传动线缆绕所述第二转动件的缠绕方向与所述第四传动线缆绕所述第二转动件的缠绕方向相反,并且所述第三传动线缆绕所述第三转动件的缠绕方向和所述第四传动线缆绕所述第三转动件的缠绕方向与所述第一传动线缆绕所述第三转动件的缠绕方向和所述第二传动线缆绕所述第三转动件的缠绕方向相反;
所述第二转动件或所述第三转动件转动时,所述第三动滑轮在所述第三传动线缆的作用下移动,所述第四动滑轮在所述第四传动线缆的作用下移动。
可选地,所述第一动滑轮经由第一轴可枢转地连接至第一动滑轮座,所述第一动滑轮座用于连接所述第一线缆,所述第二动滑轮经由第二轴可枢转地连接至第二动滑轮座,所述第二动滑轮座用于连接所述第二线缆,所述第一轴平行于所述第二轴,并且平行于所述第一中心轴线,并且/或者
所述第三动滑轮经由第三轴可枢转地连接至第三动滑轮座,所述第三动滑轮座用于连接所述第三线缆,所述第四动滑轮经由第四轴可枢转地连接至第四动滑轮座,所述第四动滑轮座用于连接所述第四线缆,所述第三轴平行于所述第四轴,并且平行于所述第一中心轴线。
可选地,所述第二传动组件还包括第二导向轮,所述第四传动线缆的位于所述第二转动件和所述第四动滑轮之间的部分绕过所述第二导向轮,使得所述第四传动线缆的位于所述第二导向轮和所述第四动滑轮之间的部分平行于所述第四传动线缆的位于所述第四动滑轮和所述第三转动件之间的部分。
可选地,所述第三线缆的位于所述第二转动件和所述第三动滑轮之间的部分平行于所述第三线缆的位于所述第三动滑轮和所述第三转动件之间的部分,并且平行于所述第四传动线缆的位于所述第四动滑轮和所述第三转动件之间的部分。
根据本发明的第二方面,公开了一种医疗器械,其包括根据上述第一方面中任一项所述的后端传动装置。
根据本发明的第三方面,公开了一种手术机器人,其包括根据上述第三方面中所述的医疗器械。
附图说明
本发明的下列附图在此作为本发明的一部分用于理解本发明。附图中示出了本发明的实施例及其描述,用来解释本发明的原理。
附图中:
图1为根据本发明的第一实施方式的手术机器人的结构示意图;
图2为图1中的手术机器人的局部结构示意图,其中示出了腕部机构、第一线缆、第二线缆、第三线缆和第四线缆;
图3为图1中的手术机器人的另一个局部结构示意图,其中示出了后端传动装置、第一线缆、第二线缆、第三线缆和第四线缆;
图4为图1中的手术机器人的后端传动装置的局部结构示意图。
附图标记说明:
100:手术机器人 110:机械臂
111:臂 120:医疗器械
130:腕部机构 131:近端夹具
132:远端夹具 133:执行器
134:夹爪上颚 135:夹爪下颚
136:第一销轴 137:第二销轴
140:主管路 141:第一线缆
142:第二线缆 143:第三线缆
144:第四线缆 150:后端传动装置
151:第一转动件 152:第二转动件
153:第三转动件 156:第一动滑轮
157:第二动滑轮 158:第一传动线缆
159:第二传动线缆 161:第一轴
162:第二轴 163:第一导向轮
164:第三动滑轮 165:第四动滑轮
166:第三传动线缆 167:第四传动线缆
168:第三轴 169:第四轴
171:第二导向轮 172:底盘
173:第一转动轴 174:第二转动轴
175:第三转动轴 176:第三导向轮组
177:第五轴 178:第三导向轮
181:第一动滑轮座 182:第二动滑轮座
183:第三动滑轮座 184:第四动滑轮座
A1:第一中心轴线 A2:第二中心轴线
A3:第三中心轴线
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员来说显而易见的是,本发明实施方式可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明实施方式发生混淆,对于本领域公知的一些技术特征未进行描述。
为了彻底了解本发明实施方式,将在下列的描述中提出详细的结构。显然,本发明实施方式的施行并不限定于本领域的技术人员所熟习的特殊细节。需要说明的是,本发明中所引用的诸如“第一”和“第二”的序数词仅仅是标识,而不具有任何其他含义,例如特定的顺序等。而且,例如,术语“第一部件”其本身不暗示“第二部件”的存在,术语“第二部件”本身不暗示“第一部件”的存在。本发明中所使用的术语“上”、“下”、“前”、“后”、“左”、“右”以及类似的表述只是为了说明的目的,并非限制。
如图1所示,本发明公开了一种后端传动装置150、医疗器械120和手术机器人100。手术机器人100包括可移动地设置的机械臂110以及安装至该机械臂110的医疗器械120,医疗器械120包括该后端传动装置150。如在本领域已知的,医疗器械120可以实现很多功能,包括但不限于不同形状和大小的手术钳或抓持器、针驱动器、剪刀或灼烧工具。
如图1所示,手术机器人100主要包括基座180和可转动地设置在基座180的上端的至少一个机械臂110以及安装至机械臂110的对应端口的医疗器械120。图1中仅示例性地示出了一个机械臂110,该机械臂110包括多个首尾连接在一起的臂111,并且这些臂111可转动的设置。当有多个机械臂110时,每一个机械臂110的对应端口均安装有医疗器械120。医疗器械120与机械臂110可拆卸地连接,以便于在更换或者维修医疗器械120,并且被安装到机械臂110上的医疗器械120可以被选择用于具体医疗程序或者在医疗程序期间被改变以提供需要的临床功能。
机械臂110的对接端口一般包括为医疗器械120的操作提供机械动力的驱动电机。对接端口可以另外包括与医疗器械120连接的电接口,以便例如识别在对接端口中的器械类型并且获得器械的参数。
医疗器械120通常包括后端传动装置150、从后端传动装置150延伸的主管路140和在主管路140的远端处的腕部机构130。被连接至腕部机构130的驱动线缆(具体地指第一线缆141、第二线缆142、第三线缆143和第四线缆144)和电导体可以延伸通过主管路140并且连接至后端传动装置150。后端传动装置150提供上述驱动线缆至驱动电机的电机驱动轴的机械联接,以通过控制驱动线缆的运动和张力从而操作腕部机构130。主管路140是中空的,并且可以是刚性的或者挠性的。
如图2所示,腕部机构130包括近端夹具131、远端夹具132和执行器133。远端夹具132通过第一销轴136可枢转地连接至近端夹具131,从而实现腕部机构130的俯仰运动。执行器133包括夹爪上颚134和夹爪下颚135,夹爪上颚134和夹爪下颚135通过第二销轴137可枢转地连接至远端夹具132,从而实现腕部机构130的夹握和偏转。优选地,第二销轴137垂直于第一销轴136。
第一线缆141和第二线缆142被绕接至执行器133的夹爪下颚135,也就是说,第一线缆141和第二线缆142可以为不间断的一体结构的线缆绕过夹爪下颚135形成。第三线缆143和第四线缆144被绕接至执行器133的夹爪上颚134,也就是说,第三线缆143和第四线缆144可以为不间断的一体结构的线缆绕过夹爪上颚134形成。第一线缆141、第二线缆142、第三线缆143和第四线缆144沿执行器133、远端夹具132和近端夹具131中的导向通道(未示出)的坚硬表面延伸,并且通过主管路140延伸返回至后端传动装置150。例如,导向通道可以为横截面为U形或者半圆形的凹槽。
继续参照图2,通过等长拉进第三线缆143和第四线缆144的同时等长释放第一线缆141和第二线缆142,使得远端夹具132相对于近端夹具131绕第一销轴136顺时针转动,以实现腕部机构130的俯仰正向运动(参见图2)。类似地,通过等长拉进第一线缆141和第二线缆142的同时等长释放第三线缆143和第四线缆144,使得远端夹具132相对于近端夹具131绕第一销轴136逆时针转动,实现腕部机构130的俯仰反向运动。
通过拉进第四线缆144的同时等长释放第三线缆143,使得夹爪上颚134相对于远端夹具132绕第二销轴137的顺时针转动(参见图2中的偏转1)。类似地,通过拉进第三线缆143的同时等长释放第四线缆144,使得夹爪上颚134相对于远端夹具132绕第二销轴137的逆时针转动。通过拉进第二线缆142的同时等长释放第一线缆141,使得夹爪下颚135相对于远端夹具132绕第二销轴137的顺时针转动(参见图2中的偏转2)。类似地,通过拉进第一线缆141的同时等长释放第二线缆142,使得夹爪下颚135相对于远端夹具132绕第二销轴137的逆时针转动。通过夹爪上颚134和夹爪下颚135的运动组合可以实现执行器133的偏转和夹握运动,这将在下面进行详细的说明。
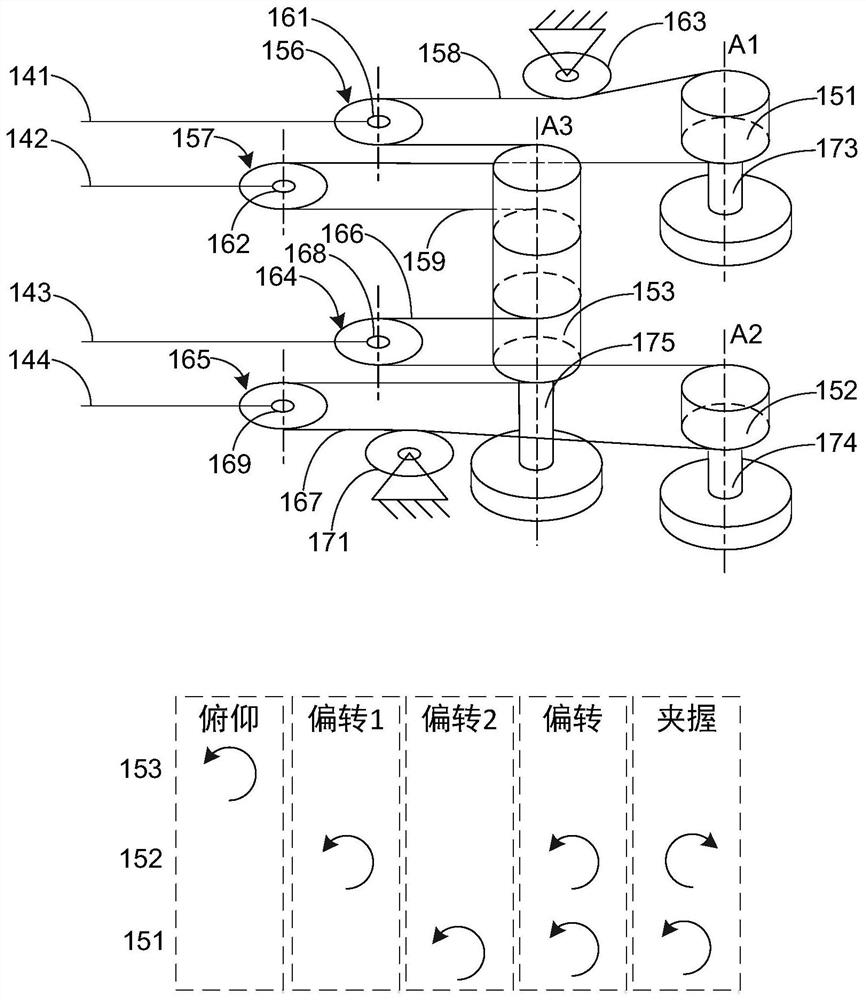
如图3和图4所示,后端传动装置150主要包括第一转动件151、第二转动件152、第三转动件153、第一传动组件、第二传动组件、第一转动轴173、第二转动轴174第三转动轴175和底盘172。第一转动轴173、第二转动轴174和第三转动轴175均分别可转动地安装至底盘172,并且分别用于与对应的驱动电机连接。第一传动组件、第二传动组件均安装至底盘172。底盘172具有和驱动电机对应的接口,确保在医疗器械120正确安装时,第一转动轴173、第二转动轴174和第三转动轴175能够与驱动电机稳定连接,以实现旋转运动的传递。
可以理解,手术机器人100可以包括至少三个驱动电机,其中三个驱动电机分别与第一转动轴173、第二转动轴174和第三转动轴175连接。第一转动轴173、第二转动轴174和第三转动轴175相互平行地设置,并且第一转动轴173、第二转动轴174和第三转动轴175大致呈三角形排布。可以理解,第一转动轴173、第二转动轴174和第三转动轴175的排布方式不限于本实施方式,根据需要,第一转动轴173、第二转动轴174和第三转动轴175还可以呈直线排布。第一转动轴173与第一转动件151固定连接,第二转动轴174与第二转动件152固定连接,第三转动轴175与第三转动件153固定连接,以分别带动第一转动件151、第二转动件152和第三转动件153的转动。在本实施方式中,第一转动件151、第二转动件152和第三转动件153为绞盘。
第一传动组件用于分别连接第一线缆141和第二线缆142,并且分别连接至第一转动件151和第三转动件153。第一传动组件主要包括第一动滑轮156、第二动滑轮157、第一传动线缆158和第二传动线缆159。第一动滑轮156经由第一轴161可枢转地连接至第一动滑轮座181,第一动滑轮156绕第一轴161可枢转,第一线缆141连接至第一动滑轮座181。第二动滑轮157经由第二轴162可枢转地连接至第二动滑轮座182,第二动滑轮157绕第二轴162可枢转,第二线缆142连接至第二动滑轮座182。
第一传动线缆158绕过第一动滑轮156,并且第一传动线缆158的两端分别连接至第一转动件151和第三转动件153。第二传动线缆159绕过第二动滑轮157,并且第二传动线缆159的两端分别连接至第一转动件151和第三转动件153。具体地,第一传动线缆158和第二传动线缆159绕第一转动件151的缠绕方向相反,并且绕第三转动件153的缠绕方向相同。当第一转动件151或第三转动件153转动时,第一动滑轮156在第一传动线缆158的作用下移动,并且第二动滑轮157在第二传动线缆159的作用下移动。
第一传动组件还包括第一导向轮163,第一传动线缆158的位于第一转动件151和第一动滑轮156之间的部分绕过第一导向轮163,使得第一传动线缆158的位于第一导向轮163和第一动滑轮156之间的部分平行于第一传动线缆158的位于第一动滑轮156和第三转动件153之间的部分,并且使得第一传动线缆158的位于第一导向轮163和第一动滑轮156之间的部分与第一传动线缆158的位于第一动滑轮156和第三转动件153之间的部分的线速度的绝对值相等,也就是说,第一传动线缆158的位于第一动滑轮156的两侧的线缆的线速度的绝对值相等。第二传动线缆159的位于第一转动件151和第二动滑轮157之间的部分平行于第二传动线缆159的位于第二动滑轮157和第三转动件153之间的部分,并且平行于第一传动线缆158的位于第一动滑轮156和第三转动件153之间的部分,也就是说,第二传动线缆159的位于第二动滑轮157的两侧的线缆的线速度的绝对值相等。第一导向轮163可以为定滑轮。本领域技术人员可以理解,根据需要,还可以额外地增加其它导向轮,以对第一传动线缆158和第二传动线缆159进行导向。
第一转动件151构造为绕第一中心轴线A1可转动,以能够经由第一传动组件拉进第一线缆141和第二线缆142中的一者,同时释放第一线缆141和第二线缆142中的另一者,以实现夹爪下颚135相对于远端夹具132绕第二销轴137的顺时针或者逆时针转动。优选地,第一轴161平行于第二轴162,并且平行于第一中心轴线A1。
具体地,当第三转动件153保持不动时,通过驱动电机控制第一转动轴173带动第一转动件151逆时针转动时,第二传动线缆159被拉进(即缠绕在第一转动件151上)的同时第一传动线缆158被等长释放,即第二线缆142经由第二动滑轮157被拉进的同时第一线缆141经由第一动滑轮156等长被释放,进而实现夹爪下颚135相对于远端夹具132绕第二销轴137的顺时针转动(参见图2中的偏转2)。当第三转动件153保持不动,通过驱动电机控制第一转动轴173带动第一转动件151顺时针转动时,第一传动线缆158被拉进(即缠绕在第一转动件151上)的同时第二传动线缆159被等长释放,即第一线缆141经由第一动滑轮156被拉进的同时第二线缆142经由第二动滑轮157等长被释放,进而实现夹爪下颚135相对于远端夹具132绕第二销轴137的逆时针转动。
继续参照图3和图4,第二传动组件用于分别连接第三线缆143和第四线缆144,并且分别连接至第二转动件152和第三转动件153。第二传动组件包括第三动滑轮164、第四动滑轮165、第三传动线缆166和第四传动线缆167。第三动滑轮164经由第三轴168可枢转地连接至第三动滑轮座183,第三动滑轮164绕第三轴168可枢转,第三线缆143连接至第三动滑轮座183。第四动滑轮165经由第四轴169可枢转地连接至第四动滑轮座184,第四动滑轮165绕第四轴169可枢转,第四线缆144连接至第四动滑轮座184。
第三传动线缆166绕过第三动滑轮164,并且第三传动线缆166的两端分别连接至第二转动件152和第三转动件153。第四传动线缆167绕过第四动滑轮165,并且第四传动线缆167的两端分别连接至第二转动件152和第三转动件153。具体地,第三传动线缆166和第四传动线缆167绕第二转动件152的缠绕方向相反,并且绕第三转动件153的缠绕方向与第一传动线缆158和第二传动线缆159绕第三转动件153的缠绕方向相反。当第二转动件152或第三转动件153转动时,第三动滑轮164在第三传动线缆166的作用下移动,并且第四动滑轮165在第四传动线缆167的作用下移动。
第二传动组件还包括第二导向轮171,第四传动线缆167的位于第二转动件152和第四动滑轮165之间的部分绕过第二导向轮171,使得第四传动线缆167的位于第二导向轮171和第四动滑轮165之间的部分平行于第四传动线缆167的位于第四动滑轮165和第三转动件153之间的部分。第三线缆143的位于第二转动件152和第三动滑轮164之间的部分平行于第三线缆143的位于第三动滑轮164和第三转动件153之间的部分,并且平行于第四传动线缆167的位于第四动滑轮165和第三转动件153之间的部分。第二导向轮171可以为定滑轮。本领域技术人员可以理解,根据需要,还可以额外地增加其它导向轮,以对第三传动线缆166和第四传动线缆167进行导向。
第二转动件152构造为绕第二中心轴线A2可转动,以能够经由第二传动组件拉进第三线缆143和第四线缆144中的一者,同时释放第三线缆143和第四线缆144中的另一者,以实现夹爪上颚134相对于远端夹具132绕第二销轴137的顺时针或者逆时针转动。优选地,第三轴168平行于第四轴169,并且平行于第二中心轴线A2。
具体地,当第三转动件153保持不动时,通过驱动电机控制第二转动轴174带动第二转动件152逆时针转动时,第四传动线缆167被拉进(即缠绕在第二转动件152上)的同时第三传动线缆166被等长释放,即第四线缆144经由第四动滑轮165被拉进的同时第三线缆143经由第三动滑轮164等长被释放,使得夹爪上颚134相对于远端夹具132绕第二销轴137的顺时针转动(参见图2中的偏转1)。当第三转动件153保持不动时,通过驱动电机控制第二转动轴174带动第二转动件152顺时针转动时,第三传动线缆166被拉进(即缠绕在第二转动件152上)的同时第四传动线缆167被等长释放,即第三线缆143经由第三动滑轮164被拉进的同时第四线缆144经由第四动滑轮165等长被释放,使得夹爪上颚134相对于远端夹具132绕第二销轴137的逆时针转动。
后端传动装置150还包括第三导向轮组176(参见图4),第三导向轮组176包括两个相互平行的第五轴177和分别可枢转地设置在该两个第五轴177上的两个第三导向轮178。第三导向轮178可以为定滑轮。
该四个第三导向轮178分别能够对第一线缆141、第二线缆142、第三线缆143和第四线缆144进行导向,使得第一线缆141的位于第三导向轮组176和第一动滑轮156之间的部分平行于第一传动线缆158的位于第一动滑轮156和第三转动件153之间的部分,并且第二线缆142的位于第三导向轮组176和第二动滑轮157之间的部分平行于第二传动线缆159的位于第二动滑轮157和第三转动件153之间的部分,并且使得第三线缆143的位于第三导向轮组176和第三动滑轮164之间的部分平行于第三传动线缆166的位于第三动滑轮164和第三转动件153之间的部分,并且第四线缆144的位于第三导向轮组176和第四动滑轮165之间的部分平行于第四传动线缆167的位于第四动滑轮165和第三转动件153之间的部分。由此可以实现第一转动件151和第三转动件153对第一线缆141和第二线缆142的线性组合的驱动,并且实现第二转动件152和第三转动件153对第三线缆143和第四线缆144的线性组合的驱动。
在本实施方式中,通过控制第一转动轴173和第二转动轴174的转动,即可实现执行器133的偏转和夹握运动。
具体地,当第三转动轴175保持不动,并且第一转动轴173和第二转动轴174等角度逆时针转动时,即第一转动件151和第二转动件152等角度逆时针转动时,夹爪上颚134和夹爪下颚135均沿顺时针转动,使得执行器133实现正向偏转运动(参见图2)。当第三转动轴175保持不动,并且第一转动轴173和第二转动轴174等角度顺时针转动时,即第一转动件151和第二转动件152等角度顺时针转动时,夹爪上颚134和夹爪下颚135均沿逆时针转动,使得执行器133实现反向偏转运动。
当第三转动轴175保持不动,并且第一转动轴173逆时针转动,同时第二转动轴174等角度顺时针转动时,即第一转动件151逆时针转动,同时第二转动件152等角度顺时针转动时,使得夹爪下颚135顺时针转动,并且夹爪上颚134逆时针转动,以实现执行器133的夹握动作(参见图2)。当第三转动轴175保持不动,并且第一转动轴173顺时针转动,同时第二转动轴174等角度逆时针转动时,即第一转动件151顺时针转动,同时第二转动件152等角度逆时针转动时,使得夹爪下颚135逆时针转动,并且夹爪上颚134顺时针转动,以实现执行器133的夹握松开动作。
第三转动件153构造为绕第三中心轴线A3可转动,以能够经由第一传动组件和第二传动组件实现:拉进第一线缆141和第二线缆142中的至少一者,同时释放第三线缆143和第四线缆144中的至少一者,或者拉进第三线缆143和第四线缆144中的至少一者,同时释放第一线缆141和第二线缆142中的至少一者,以实现腕部机构130的俯仰运动。优选地,第一中心轴线A1平行于第二中心轴线A2,并且平行于第三中心轴线A3。
在本实施方式中,当第三转动件153转动时,能够经由第一传动组件和第二传动组件实现等长拉进第一线缆141和第二线缆142,同时等长释放第三线缆143和第四线缆144(即第一线缆141和第二线缆142在第三转动件153转动的过程中被缠绕在第一转动件151上的长度等于第三线缆143和第四线缆144释放的长度),或者等长拉进第三线缆143和第四线缆144,同时等长释放第一线缆141和第二线缆142,以实现腕部机构130的俯仰运动(即第三线缆143和第四线缆144在第三转动件153转动的过程中被缠绕在第二转动件152上的长度等于第一线缆141和第二线缆142释放的长度)。
具体地,当第一转动轴173和第二转动轴174保持不动,通过驱动电机控制第三转动轴175带动第三转动件153逆时针转动时,第一传动线缆158和第二传动线缆159被等长释放的同时,第三传动线缆166和第四传动线缆167被等长拉进,即第一线缆141和第二线缆142被等长释放的同时第三线缆143和第四线缆144被等长拉进,进而实现腕部机构130的俯仰正向运动。类似的,当第一转动轴173和第二转动轴174保持不动,通过驱动电机控制第三转动轴175带动第三转动件153顺时针转动时,第一传动线缆158和第二传动线缆159被等长拉进的同时第三传动线缆166和第四传动线缆167被等长释放,即得第一线缆141和第二线缆142被等长拉进的同时第三线缆143和第四线缆144被等长释放,进而实现腕部机构130的俯仰反向运动。
在本实施方式中,由于第一转动件151、第二转动件152、第三转动件153的转动经由第一动滑轮156、第二动滑轮157、第三动滑轮164和第四动滑轮165被传递到第一线缆141、第二线缆142、第三线缆143和第四线缆144,因此第一线缆141、第二线缆142、第三线缆143和第四线缆144的移动长度(拉进或者释放的长度)对应地只有第一传动线缆158、第二传动线缆159、第三传动线缆166和第四传动线缆167的移动长度的一半,相当于实现了从输入侧到输出侧2:1的减速比。因此当驱动电机的减速器存在回程差时,或者第一转动轴173、第二转动轴174和第三转动轴175与驱动电机的连接处存在回程差时,这些回程差对前端的腕部机构130的影响减小一半,以提高腕部机构130的运动精度。
根据本发明的后端传动装置,后端传动装置连接至例如腕部机构的四根驱动线缆,使得腕部机构与后端传动装置协作地工作,通过等长拉进或者释放驱动线缆(即第一线缆、第二线缆、第三线缆和第四线缆),以实现腕部机构的俯仰、偏转和夹握,这种驱动方式的结构简单,并且传动精确,转动件和腕部机构的俯仰、偏转和夹握角度成线性关系,并且在腕部机构的上述角度发生大范围变化时仍可以保证驱动线缆等长释放和/或拉进。
除非另有定义,本文中所使用的技术和科学术语与本发明的技术领域的技术人员通常理解的含义相同。本文中使用的术语只是为了描述具体的实施目的,不是旨在限制本发明。本文中出现的诸如“设置”等术语既可以表示一个部件直接附接至另一个部件,也可以表示一个部件通过中间件附接至另一个部件。本文中在一个实施方式中描述的特征可以单独地或与其它特征结合地应用于另一个实施方式,除非该特征在该另一个实施方式中不适用或是另有说明。
本发明已经通过上述实施方式进行了说明,但应当理解的是,上述实施方式只是用于举例和说明的目的,而非意在将本发明限制于所描述的实施方式范围内。本领域技术人员可以理解的是,根据本发明的教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围以内。
- 后端传动装置、医疗器械和手术机器人
- 后端传动装置、医疗器械和手术机器人