一种远程控制的延迟判断及障碍预先判断方法和机器人系统
文献发布时间:2023-06-19 13:26:15
技术领域
本发明涉及机器人远程控制领域,尤其涉及一种远程控制的延迟判断及障碍预先判断方法和机器人系统。
背景技术
机器人远程控制即通过网络等远程通信的方式,将人机控制设备与机器人建立起远程通信连接,而后操作人员可以在人机控制设备上进行操作,人机控制设备会将操作人员的操作指令通过远程通信发送到机器人上,机器人就可以响应操作人员的控制指令。如前进后退等。特别地,有些远程控制的基础是基于机器人上面的摄像头回传的视频数据,操作人员在查看视频后对机器人进行控制。由于网络本身就存在延迟,这样存在操作指令与机器人实时情况不对应的问题,容易造成机器人移动卡位、碰撞或者跌落等危险情况。
发明内容
为此,需要提供一种远程控制的延迟判断及障碍预先判断方法和机器人系统,解决由于网络延迟导致远程控制机器人时可能出现危险情况的问题。
为实现上述目的,本发明提供了一种远程控制的延迟判断及障碍预先判断方法,包括如下步骤:
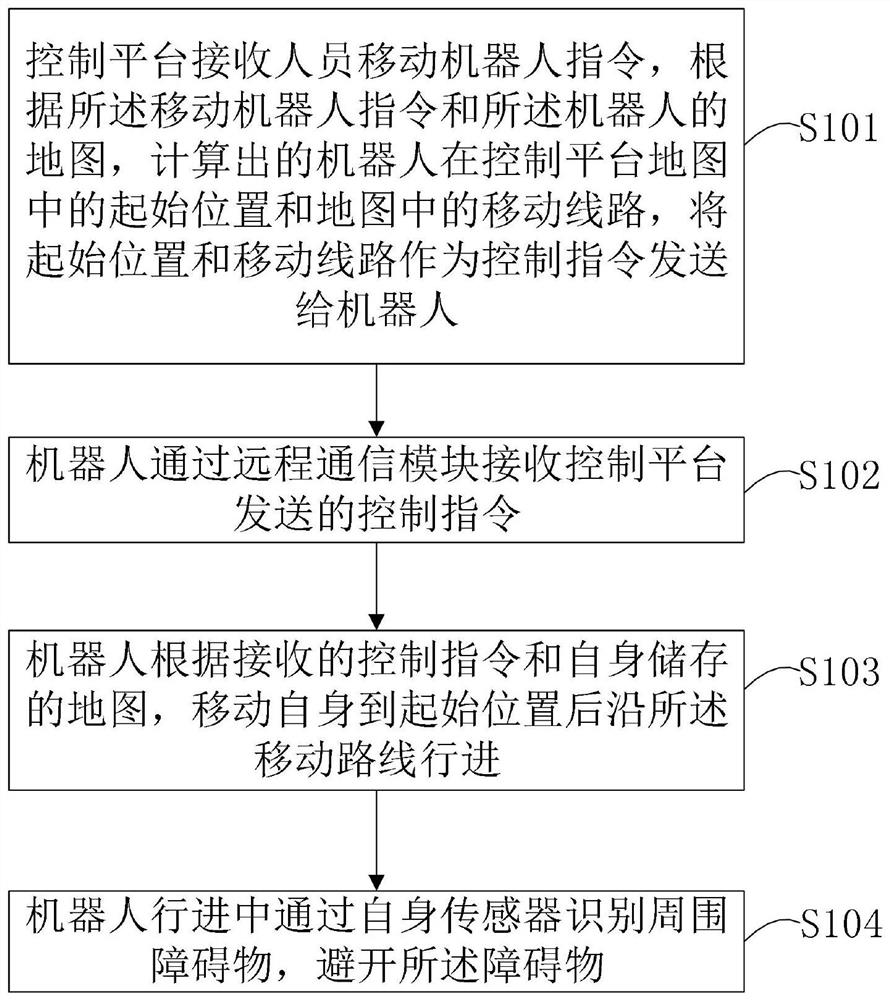
控制平台接收人员移动机器人指令,根据所述移动机器人指令和所述机器人的地图,计算出的机器人在控制平台地图中的起始位置和地图中的移动线路,将起始位置和移动线路作为控制指令发送给机器人;
机器人通过远程通信模块接收控制平台发送的控制指令;
机器人根据接收的控制指令和自身储存的地图,移动自身到起始位置后沿所述移动路线行进;
机器人行进中通过自身传感器识别周围障碍物,避开所述障碍物。
进一步地,还包括步骤:机器人获取自身摄像头获取当前环境画面,并通过远程通信模块发送到控制平台,所述控制平台接收到环境画面后显示所述环境画面。
进一步地,所述移动机器人指令包括人员控制的前进动作、后退动作或转动动作,以及每个动作对应的时间,控制平台根据动作和时间计算移动路线。
进一步地,控制平台根据控制指令在显示的平台地图上模拟机器人移动并显示。
进一步地,机器人根据自身传感器获取当前在地图所处位置并实时发送给控制平台,控制平台根据接收到的所处位置后在显示的平台地图上显示机器人位置。
进一步地,还包括步骤:机器人上传识别到的障碍物的位置信息到控制平台,控制平台接收到障碍物的位置信息后根据位置信息在地图上显示障碍物。
本发明提供一种机器人系统,包括机器人和远程连接的控制平台,所述机器人系统实现如本发明实施例任意一项所述方法的步骤。
区别于现有技术,上述技术方案通过生成带有起始位置和移动路线的控制指令,可以让机器人根据在地图内的该起始位置和移动路线进行行进。避免因为网络延迟导致机器人远程控制走到危险区域发生危险的情况。同时机器人可以完成障碍物检测和避障,进一步保障机器人的控制安全。
附图说明
图1为本发明的方法流程图;
图2为本发明的系统结构示意图。
具体实施方式
为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
请参阅图1到图2,本实施例提供一种远程控制的延迟判断及障碍预先判断方法,可以应用于图2的机器人系统上。机器人包括有用于控制的T-BOX控制器,还包括有用于转向行走的机构以及摄像头和传感器,传感器可以是感知传感器,如激光、雷达或者红外探头等。机器人内部存储有当前所在区域的地图信息,通过传感器定位,可以确定机器人在地图内所处的位置。控制平台包括有显示设备和人机交互设备,如控制摇杆或者键盘鼠标、触屏等。控制人员通过操作人机交互设备,可以实现指令的输入。控制平台也存储有机器人所在区域的地图信息。显示设备可以用于显示地图画面。
本发明在实施时,首先控制人员通过人机交互设备对机器人进行控制。如在显示有机器人地图的触摸屏上画出机器人的移动线路痕迹,或者控制摇杆让机器人往前移动一段时间。而后进入步骤S101:控制平台接收人员移动机器人指令,根据所述移动机器人指令和所述机器人的地图,计算出的机器人在控制平台地图中的起始位置和地图中的移动线路,将起始位置和移动线路作为控制指令发送给机器人。如是触摸屏上显示的地图上的移动线路痕迹,则移动线路痕迹的开端即为机器人的起始位置,移动线路痕迹即为机器人需要移动的移动线路。如果是摇杆等控制方式,则可以在地图上初始化一个机器人位置(该位置可以是机器人发送的实时位置),作为起始位置,而后根据摇杆控制的方向和时间,即可以确定出移动的方向和距离,从而形成移动线路。而后控制人员可以进行确认发送操作(不确认就不发送,避免误操作),则控制指令会通过远程发送到机器人。即进入步骤S102机器人通过远程通信模块接收控制平台发送的控制指令。远程通信模块可以是物联网模块或者互联网模块,实现远程网络通信。
而后进入步骤S103机器人根据接收的控制指令和自身储存的地图,移动自身到起始位置后沿所述移动路线行进。起始位置包含有在机器人在地图内的位置,移动路线也是机器人在地图中的移动路线。而后机器人可以通过传感器获取周围环境的情况,从而确定自身在地图中的位置,而后可以实现移动。在移动过程中,还包括步骤S104机器人行进中通过自身传感器识别周围障碍物,避开所述障碍物。避开障碍物后,可以继续沿着未完成的移动路线行进,从而完成对控制指令响应。这样通过控制平台发送与地图相关的起始位置和行进路线,可以将视频回传与控制做分离,即使视频回传出现延迟,机器人也能按照控制的控制指令进行行进,而不会出现行走到危险区域的情况,保证了机器人的安全。同时通过障碍物的判断,可以进一步保证机器人的安全。
为了显示机器人当前所处的环境画面,本发明还包括步骤:机器人获取自身摄像头获取当前环境画面,并通过远程通信模块发送到控制平台,所述控制平台接收到环境画面后显示所述环境画面。这样人员通过显示的环境画面视频可以知道机器人的情况。
进一步地,所述移动机器人指令包括人员控制的前进动作、后退动作或转动动作,以及每个动作对应的时间,控制平台根据动作和时间计算移动路线。机器人在移动或者转动时,存在一个预设的移动速度或者转动速度,通过指令动作与时间,可以计算对应的移动距离,从而可以生成对应的移动路线。本发明也可以进行实时的控制,控制平台在接收实时操作命令后,只需要实时将生成的初始位置和移动路线发送给机器人即可以完成实时控制。或者在实时控制时,控制平台实时将前进动作、后退动作或转动动作通过远程控制发送到机器人,实时需要机器人实时回传环境画面才能实现控制。在某些实施例中,环境画面包含有时间参数,控制平台在发送控制指令时,还包含当前的时间参数,机器人会记录走过的位置和对应的时间。机器人接收到控制指令时会将时间参数与记录的时间和对应的位置作为控制指令的位置,而后在该位置实现动作指令。这样即使存在画面延迟,也可以实现操做人员需要在该画面的控制指令,避免错误移动。如机器人处在A时间处在A位置形成具有A时间的A画面,控制平台接收到A画面,而后由于延迟,机器人移动到B位置,但是控制平台还是A画面,此时控制人员要在A画面进行后退,则控制平台会发送A画面的时间A和后退指令到机器人,机器人根据接收到的时间A知道是在A位置后移,则会回到A位置进行后移,而不会在B位置进行后移。这样实现控制画面与控制指令在机器人处也是对应的,避免出现因为延迟导致的错误远程控制。
为了预先显示出机器人的移动情况,控制平台根据控制指令在显示的平台地图上模拟机器人移动并显示。这样模拟后,可以实时反映机器人的位置,即使由于机器人延迟未更新,也可以知道机器人实际位置,用作后续控制参考。
在实际控制过程中,机器人要实时反馈位置,机器人根据自身传感器获取当前在地图所处位置并实时发送给控制平台,控制平台根据接收到的所处位置后在显示的平台地图上显示机器人位置。机器人的实时位置和上述的模拟机器人移动可以采用不同的颜色进行显示。地图的显示画面与摄像头的实时环境画面可以显示在不同的画面上,当然也可以在地图上的机器人位置处小窗显示实时环境画面,这样机器人位置移动时,环境画面视频窗口也跟着移动,便于控制人员查看。
为了便于控制人员指导障碍物情况,本发明还包括步骤:机器人上传识别到的障碍物的位置信息到控制平台,控制平台接收到障碍物的位置信息后根据位置信息在地图上显示障碍物。这样控制人员从地图上可以知道障碍物位置,路线控制可以避开障碍物。
本发明提供一种机器人系统,包括机器人和远程连接的控制平台,所述机器人系统实现如本发明实施例任意一项所述方法的步骤。本系统方案通过生成带有起始位置和移动路线的控制指令,可以让机器人根据在地图内的该起始位置和移动路线进行行进。避免因为网络延迟导致机器人远程控制走到危险区域发生危险的情况。同时机器人可以完成障碍物检测和避障,进一步保障机器人的控制安全。
需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
- 一种远程控制的延迟判断及障碍预先判断方法和机器人系统
- 一种预先判断无功补偿装置导流回路发热缺陷的方法