用于液体灌注的智能调控方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及智能调控技术领域,具体是一种用于液体灌注的智能调控方法。
背景技术
体外循环是利用一系列特殊人工装置将回心静脉血引流到体外,经人工方法进行气体交换,调节温度和过滤后,输回体内动脉系统的生命支持技术。
在体外循环过程中,需要将心脏离体停跳并间断灌注添加营养液的营养液,避免心脏功能受损,现如今营养液灌注基本是手术医师结合自身经验和操作习惯来控制灌注过程,其中灌注间隔时间、灌注速度、灌注温度、灌注单次剂量、灌注总量等都是人为经验判断,无法及时、准确进行操作,这就导致现有的灌注系统不仅灌注结果不准确、误差大,病人后遗症大,而且医师频繁的操作也给长时间手术带来了诸多不便和身心负担,影响手术医师正常操作。
发明内容
本发明的目的在于克服现有技术的不足,提供一种用于液体灌注的智能调控方法,该智能调控方法基于对目标灌注区域的环境数据检测,进而基于检测数据实现灌注过程控制,并及时微调,具有灌注精度高、灌注准确及时的技术特点。
本发明的目的主要通过以下技术方案实现:用于液体灌注的智能调控方法,该智能调控方法应用于液体灌注的智能调控系统,所述液体灌注的智能调控系统包括存储箱和设备箱;所述存储箱内设置有恒温电换热管和仿形底座,仿形底座设置有心脏存储腔,所述仿形底座上端一侧设置有转动支架,转动支架连接有出液管路,所述仿形底座底部还连通有与心脏存储腔连通的回液管路;出液管路包括顺次连通的主管路、软管及灌注针,所述软管外部套设有鹅颈管,所述灌注针的针口一端分叉形成有两个斜支管,两个斜支管分别内设有温度传感器和乳酸传感器;设备箱内通过管路顺次连通有营养液存储罐、蠕动泵、过滤器、膜氧合器、电温控箱、电子调速阀及电子流量计,所述主管路与流量计出口端连通,所述回液管路与营养液存储罐连通;还包括设置于设备箱内的控制系统,恒温电换热管、温度传感器、乳酸传感器、蠕动泵、膜氧合器、电温控箱、电子调速阀及电子流量计均与所述控制系统信号连接;
所述智能调控方法包括以下步骤:
控制系统控制恒温电换热管工作直至存储箱内温度稳定至所需温度;
连通灌注针和目标灌注区域;
乳酸传感器获取所述目标灌注区域的乳酸含量作为第一乳酸数据发送至控制系统,温度传感器获取所述目标灌注区域的温度发送至控制系统;
控制系统接收第一乳酸数据并与预设的第一乳酸阀值比较,当接收到的所述第一乳酸数据超过第一乳酸阈值时,发出灌注触发指令,控制蠕动泵和膜氧合器开启进行灌注;
控制系统在所述第一乳酸数据超过所述第一乳酸阈值时,同步记录当前目标灌注区域的温度作为第一温度数据,记录本次第一乳酸数据在超过第一乳酸阈值后的最大值作为第一修正数据,并将所述第一温度数据和所述第一修正数据进行运算后修正所述第一乳酸阈值。
本技术方案的智能调控方法中,将所述第一温度数据和所述第一修正数据进行运算后修正所述第一乳酸阈值具体包括:
控制系统将第一修正数据与控制系统预设的第二乳酸阀的差值作为第二修正数据,通过第一温度数据修正所述第二修正数据作为第三修正数据,并计算第一乳酸阀值与第三修正数据的差值作为修正后的第一乳酸阀值。
本技术方案的智能调控方法中,所述控制系统在开启时对所述第一乳酸阈值进行初始化;
所述控制系统将所述第二乳酸阈值赋值于所述第一乳酸阈值完成所述初始化。
本技术方案的智能调控方法中,所述通过第一温度数据修正所述第二修正数据作为第三修正数据具体包括:
控制系统计算所述第一温度数据和控制系统预设的第二温度数据的比值,将比值作为第四修正数据;所述第一温度数据和所述第二温度数据均采用开氏温度;
所述控制系统计算所述第二修正数据与所述第四修正数据的乘积作为第三修正数据。
本技术方案的智能调控方法中,所述控制蠕动泵和膜氧合器开启进行灌注还包括:
温度传感器获取所述第一乳酸数据超过所述第一乳酸阈值的时刻作为第一时刻,并获取本次第一乳酸数据在超过第一乳酸阈值后的达到最大值的时刻作为第二时刻;
控制系统计算所述第二时刻与所述第一时刻的差值作为修正时间,并计算所述最大值与所述第一乳酸阈值的差值作为修正乳酸数据;
控制系统计算所述修正乳酸数据与所述修正时间的比值作为升高速度数据,并基于所述升高速度数据生成灌注流量数据;
控制系统基于灌注流量数据控制电子调速阀进行流量修正,控制下一次灌注流量。
本技术方案的智能调控方法中,所述控制系统计算所述修正乳酸数据与所述修正时间的比值作为升高速度数据,并基于所述升高速度数据生成灌注流量数据,具体包括:
控制系统预设有灌注基准速度和灌注基准流量;
控制系统计算所述升高速度数据与所述基准速度的比值乘以所述基准流量生成灌注流量数据。
本技术方案的智能调控方法中,获取温度传感器获取所述目标灌注区域的温度发送至控制系统之后,还包括:
控制系统基于获取的目标灌注区域的温度与控制系统预设温度进行比较,当获取的目标灌注区域的温度超过控制系统预设温度时,控制电温控箱开启直至下一次获取的目标灌注区域的温度低于控制系统预设温度。
本技术方案的智能调控方法中,所述灌注针位于两个所述斜支管同一圆周外壁还设置有第三斜支管,第三斜支管同样朝向灌注针的针口一端;
所述第三斜支管内设置有生物电传感器,生物电传感器与所述控制系统信号连接。
本技术方案的智能调控方法中,还包括以下步骤:
生物电传感器获取目标灌注区域的生物电信号;
控制系统接收生物电信号并进行处理后生成电信号判别数据,并在所述电信号判别数据超过控制系统预设的生物电信号数据阈值时发出灌注触发指令,控制蠕动泵和膜氧合器开启进行灌注。
本技术方案的智能调控方法中,所述控制系统对所述生物电信号滤波降噪后,进行频域分析获取预设频带内的功率谱密度,并将所述功率谱密度作为电信号判别数据。
与现有技术相比,本发明的有益效果如下:本发明的液体灌注的智能调控系统可以将离体心脏进行稳定固定,且在灌注时灌注针不会移位,可确保灌注位置的准确性,并可对灌注条件和过程进行智能调控。
因此,基于此,本发明的用于液体灌注的智能调控方法即可在系统支持下,可针对不同特征的离体心脏灵活的对灌注条件、时间、剂量等进行智能综合调控,实现了精准、及时的营养液灌注,保证了离体心脏活性,且全程无需手术医师操控,减少了手术医师负担。
附图说明
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本申请的一部分,并不构成对本发明实施例的限定。在附图中:
图1是本发明用于液体灌注的智能调控系统的侧视图;
图2是本发明用于液体灌注的智能调控系统的俯视图;
图3是本发明用于液体灌注的智能调控系统的正视图一;
图4是本发明用于液体灌注的智能调控系统的出液管路的结构示意图;
图5是本发明用于液体灌注的智能调控系统的灌注针的第一结构示意图;
图6是本发明用于液体灌注的智能调控系统的灌注针的第二结构示意图;
图7是本发明用于液体灌注的智能调控系统的正视图二;
图8是本发明用于液体灌注的智能调控系统的控制系统的结构框图;
图9是本发明用于液体灌注的智能调控方法的流程图;
图10是本发明用于液体灌注的智能调控方法中步骤206的流程图;
图中的标号分别表示为:
100、用于液体灌注的智能调控系统;
101、存储箱;
1011、恒温电换热管;1012、仿形底座;10121、减震支架;10122、心脏存储腔;10123、软胶散热垫;1013、转动支架;1014、出液管路;10141、主管路;10142、软管;10143、灌注针;101431、斜支管;101432、温度传感器;101433、乳酸传感器;101434、第三斜支管;101435、生物电传感器;10144、鹅颈管;10145、金属针头;1015、回液管路;
102、设备箱;
1021、营养液存储罐;1022、蠕动泵;1023、过滤器;1024、膜氧合器;1025、电温控箱;1026、电子调速阀;1027、电子流量计;
103、控制系统;
1031、获取模块;1032、控制模块;1033、修正模块;
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
本发明第一个实施例提供了一种用于液体灌注的智能调控系统100,该用于液体灌注的智能调控系统100主要用于各个领域、各种液体灌注领域的智能化液体灌注,尤其适用于离体心脏营养液的智能调控灌注,属于新一代智能调控系统。
如图1-图2所示,本用于液体灌注的智能调控系统100主要由存储箱101和设备箱102两大部件组成,其中,存储箱101和设备箱102可以是一体成型的,也可以是分体结构进行拼接、层叠组成的,存储箱101主要用于离体心脏存储,设备箱102主要用于安装设备以供离体心脏进行营养液智能灌注。作为一种设置方式,存储箱101和设备箱102可以是由一设备主体利用隔板隔离形成,且存储箱101位置设备箱102的上端或上部,存储箱101的箱体可以采用透明材料如透明塑胶等制成,以便于观察内部心脏情况,且存储箱101的箱体上端采用透明密封盖密封,并最好采用隔热透明塑胶制成,以确保存储箱101内温度。
如图3所示,存储箱101内壁设置有恒温电换热管1011,恒温电换热管1011可呈蛇形弯折环绕覆盖于存储箱101内壁,以对存储箱101内温度进行调节,保证存储箱101内温度处于所需温度。
在存储箱101内的中部位置则设置有一与心脏外形相似的仿形底座1012,仿形底座1012通过一减震支架10121连接于存储箱101内,可以避免存储箱101在移动或触碰后影响离体心脏存储,为了更好的定位和放置离体心脏,仿形底座1012上端则向内凹陷形成与心脏外形相仿的心脏存储腔10122,离体心脏即可存储于心脏存储腔10122内并与心脏存储腔10122很好的匹配,保证离体心脏的稳定。具体的,仿形底座1012由钛合金制成,钛合金为稳定性很好的医用金属,以避免其因腐蚀、感染等造成离体心脏的损害,并且可以对离体心脏进行很好的热交换。进一步的,仿形底座1012位于心脏存储腔10122的腔壁还贴附有软胶散热垫10123,以便于离体心脏代谢的热量能及时散发。
存储箱101还位于仿形底座1012上端设置有转动支架1013,转动支架1013连接有出液管路1014。转动支架1013由水平转动架体和转动连接在水平转动架体上的竖直转动架体组成,出液管路1014连接于竖直转动架体上,从而转动支架1013可以带动出液管路1014水平和竖直转动,进而可以根据灌注位置进行位置调节,使得出液管路1014与离体心脏的连接位置稳定。
如图4-图6,出液管路1014主要用于与离体心脏连通以灌注营养液,其主要由顺次连通的主管路10141、软管10142及灌注针10143组成。
具体的,主管路10141用于与设备箱102连通。
软管10142则用于连通主管路10141和灌注针10143。软管10142可通过卡扣、粘接等方式连接于竖直转动架体上,采用软胶管制成,其可以根据灌注针10143的灌注位置需求而任意弯折,可很好的保证灌注针10143的灌注位置。进一步的,为进一步保证和定位灌注针10143的灌注位置,软管10142外部滑动套设有鹅颈管10144,鹅颈管10144用于与竖直转动架体连接,其具有任意弯折和任意位置固定的特性,从而在灌注针10143与离体心脏连通后,可以保持灌注针10143的位置使其能更好的保持灌注位置而不移位,提高灌注的安全性和稳定性。
灌注针10143用于与离体心脏连通。灌注针10143为软胶灌注针,避免硬质结构对离体心脏造成损害,软管10142通过鹅颈管10144内部与所述主管路10141连通,在使用之前,灌注针10143内套设有一金属针头10145,灌注时,金属针头10145扎入离体心脏后取出,即可将灌注针10143留在离体心脏内,完成与离体心脏连通。
为了实现对心脏进行心肌细胞氧缺乏的检测,以了解心脏新陈代谢和活性,灌注针10143的针口一端分叉形成有两个斜支管101431,两个斜支管101431分别内设有温度传感器101432和乳酸传感器101433。温度传感器101432和乳酸传感器101433可以分别对心脏内灌注区域进行温度和乳酸含量进行检测,从而可以获取心脏新陈代谢和缺氧情况,并可作为灌注的部分数据,用于控制灌注时间、流量、营养液温度等,此部分内容留待后序详述。作为补充,温度传感器101432和乳酸传感器101433的信号线可通过灌注针10143和软管10142的壁内走线并通过鹅颈管10144后与所述设备箱102连接。
进一步的,灌注针10143位于两个所述斜支管同一圆周外壁还设置有第三斜支管101434,第三斜支管101434同样朝向灌注针10143的针口一端,并在第三斜支管101434内设置有生物电传感器101435,生物电传感器101435与所述述设备箱102连接,从而可以基于生物电传感器101435检测离体心脏生物电信息,进一步起到监控心脏新陈代谢和活性的作用,并可防止心脏复跳。
请继续参阅图3,为了回收离体心脏排出的废液,仿形底座1012底部还连通有与心脏存储腔10122连通的回液管路1015。回液管路1015用于接收心脏排出的废液,避免废液堆积影响或损害心脏。进一步的,回液管路1015可与设备箱102连通,并与出液管路1014形成一完整循环管路,经过过滤、更换、添加新营养液后再次使用,实现循环使用的目的。
如图7所示,设备箱102主要用于安装灌注设备。
具体的,设备箱102为硬质材料如金属制成的箱体结构,箱体形状可任选,箱体可设置开关门以对内部设备进行安装维护。在设备箱102内部设置有通过管路顺次连通的营养液存储罐1021、蠕动泵1022、过滤器1023、膜氧合器1024、电温控箱1025、电子调速阀1026及电子流量计1027,所述出液管路1014的主管路10141与流量计1027出口端连通,所述回液管路1015与营养液存储罐1021连通。营养液存储罐1021存储有营养液,营养液依次经过蠕动泵1022、过滤器1023、膜氧合器1024、电温控箱1025、电子调速阀1026、电子流量计1027、主管路10141、软管10142及灌注针10143后对离体心脏进行营养液灌注,再通过回液管路1015回收营养液,从而形成一个完整的营养液循环灌注系统。
在实际使用时,蠕动泵1022用于输送营养液,并在需要时改变营养液输送压力;过滤器1023用于过滤营养液内杂质;膜氧合器1024用于产生氧气,在需要时,可以为营养液注氧,以为心脏提供充足的氧气;电温控箱1025则具有调温作用,在需要时,用于改变营养液温度,使其更适合心脏所需;电子调速阀1026用于调节营养液流量或流速,以保证单位时间的灌注量;电子流量计1027则是用于检测营养液流量或流速,便于手术医师观察以及作为基础数据使用。
基于以上结构,可以实现心脏的存储和灌注,但为了实现精准、及时的灌注要求,本用于液体灌注的智能调控系统100还设置有控制系统103,其设置于设备箱102以内,以上的恒温电换热管1011、生物电传感器101435、温度传感器101432、乳酸传感器101433、蠕动泵1022、膜氧合器1024、电温控箱1025、电子调速阀1026及电子流量计1027等电子设备均与控制系统103实现信号连接,从而可以通过控制系统103接收相应数据、基于相应数据进行调节和控制,实现智能灌注调控。
如图8所示,控制系统103主要由信号连接的获取模块1031、控制模块1032及修正模块1033三大模块组成。
其中,获取模块1031用于接收并获取设备检测数据,该设备检测数据为恒温电换热管1011、生物电传感器101435、温度传感器101432、乳酸传感器101433、蠕动泵1022、膜氧合器1024、电温控箱1025、电子调速阀1026及电子流量计1027等的检测数据和/或检测数据获取时刻。以温度传感器101432和乳酸传感器101433为例,温度传感器101432和乳酸传感器101433分别实时获取灌注区域的温度数据和乳酸含量数据,获取模块1031实时的接收温度数据和乳酸含量数据;或,控制模块1032控制获取模块1031发出获取指令,此时温度传感器101432和乳酸传感器101433接收指令进行灌注区域的温度数据和乳酸含量数据检测,完成后发送至获取模块1031。
控制模块1032用于控制恒温电换热管1011、生物电传感器101435、温度传感器101432、乳酸传感器101433、蠕动泵1022、膜氧合器1024、电温控箱1025、电子调速阀1026及电子流量计1027的工作,其预设有若干阀值,如乳酸含量阀值、温度阀值、流量阀值等,当获取模块1031获取设备检测数据后,控制模块1032基于获取的设备检测数据或基于设备检测数据与相应阀值的比较,来对以上电子设备进行智能控制。
修正模块1033用于修正设备检测数据以获得修正数据,从而可以根据设备检测数据和修正数据修正控制模块1032下一次工作的预设阀值,使得所需电子设备开闭或工作量更贴合实际所需,从而可以尽量保证灌注更加精准和贴合实际。以乳酸含量阀值为例,当控制模块1032根据设备检测数据获得了修正数据后,其可以根据修正数据调整其自身预设的乳酸含量阀值,从而使得每次灌注的时刻或灌注量均能更能及时和准确,从而保证每次灌注都能更贴合实际灌注所需。
需要说明的是,控制系统103作为一套对灌注装置进行检测控制的设备,控制系统103可以是台式电脑、平板电脑、笔记本电脑、手机或者其他能够实现数据处理以及数据通信的控制系统,在此不作过多限定。
以上即为用于液体灌注的智能调控系统100的全部内容和解释,为了用于液体灌注的智能调控系统100能够被更好的理解和实施,本发明第二个实施例则公开了一种用于液体灌注的智能调控方法200。
本用于液体灌注的智能调控方法200主要用于液体灌注时的智能化控制,尤其适用于离体心脏营养液灌注时的智能控制,可基于以上用于液体灌注的智能调控系统100完整实施。
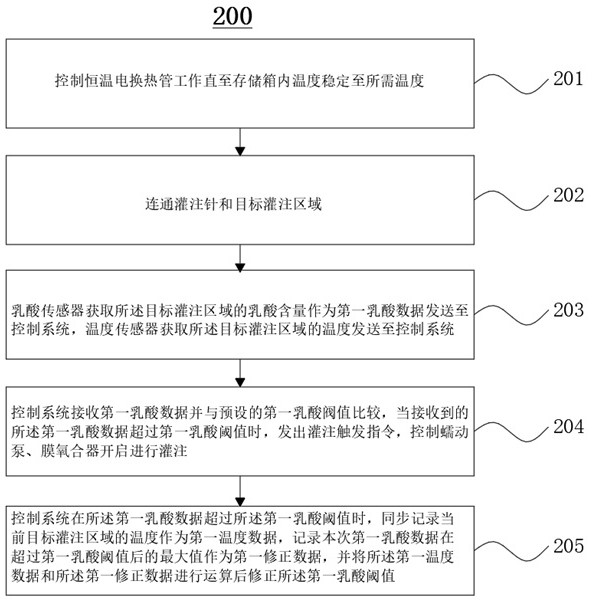
如图9所示,用于液体灌注的智能调控方法200主要包括以下步骤201~205:
步骤201、控制恒温电换热管1011工作直至存储箱102内温度稳定至所需温度。
本步骤中,离体心脏存储至存储箱102内前,需要保证存储箱102内温度先升高或降至存储温度,一般的存储温度在4℃~10℃,然后才能进行存储,因此,可控制恒温电换热管1011工作对存储箱102进行调温一致温度稳定在存储温度。
作为可行的恒温电换热管1011控制方式,恒温电换热管1011可以通过上述控制系统103进行控制。具体的,控制系统103的控制模块1032开启控制恒温电换热管1011工作直至其稳定后完成调温,控制模块1032可预设一恒温阀值以控制恒温电换热管1011调至该阀值或该阀值范围内。进一步的,存储箱102内还可设置一些温度检测设备如温度传感器、温度计等实时检测室内温度,控制模块1032随时可以根据检测的室内温度进行控制,以保证存储箱102内温度的稳定性和准确性。
步骤202、连通灌注针10143和目标灌注区域。
本步骤中,当存储箱102内温度满足所需后,即可将离体心脏放置于心脏存储腔10122内稳定支撑,此时即可将灌注针10143与离体心脏连通,其中,连通时,离体心脏的心脏冠状动脉、心脏冠状动脉根部等动脉区域可作为目标灌注区域,灌注针10143可在目标灌注区域内与心脏连通,为离体心脏提供营养液。
步骤203、乳酸传感器101433获取所述目标灌注区域的乳酸含量作为第一乳酸数据发送至控制系统103,温度传感器101432获取所述目标灌注区域的温度发送至控制系统103。
本步骤中,利用乳酸测量值来评估离体心脏新陈代谢情况、营养液灌注情况的医学原理,通过设置乳酸传感器101433来检测目标灌注区域的乳酸含量,进而可以了解心脏活性,并且评估所需的营养液,并且检测实时进行,可以保证检测的及时性。
同理,离体心脏新陈代谢会产生热量,引发离体心脏内部温度升高,为了避免离体心脏温度过高而影响活性,本步骤的温度传感器101432可以实时采集目标灌注区域的温度并发送至控制系统103,以便于对离体心脏进行更全面的监控。
步骤204、控制系统103接收第一乳酸数据并与预设的第一乳酸阀值比较,当接收到的所述第一乳酸数据超过第一乳酸阈值时,发出灌注触发指令,控制蠕动泵1022、膜氧合器1024开启进行灌注。
现有技术中,发明人发现在对目标灌注区域进行营养液灌注时,由于营养液的供氧和停跳功能需要时间发挥作用,所以如果只是在乳酸含量达到一定程度时灌注营养液,乳酸含量也会持续上升一段时间,造成灌注监控不够准确,这也是现有人为灌注过程中导致灌注不精准的原因之一。
因此,本步骤中,为了避免灌注不够准确和及时,控制系统103也即控制模块1032预设有第一乳酸阀值,第一乳酸阀值的真实数值应当略低于实际需要灌注时的乳酸阀值,当接收到的所述第一乳酸数据超过第一乳酸阈值时,控制系统103发出灌注指令即控制控制蠕动泵1022、膜氧合器1024工作,进行营养液灌注,从而在灌注开始过程中,乳酸含量即使有所上升也不会造成灌注不及时的问题,可确保灌注更加及时准确。
需要说明的是,灌注一般按照10~15ml/公斤体重的营养液灌注剂量进行灌注,该剂量属于现有技术,在此处不再多做复述。
步骤205、控制系统103在所述第一乳酸数据超过所述第一乳酸阈值时,同步记录当前目标灌注区域的温度作为第一温度数据,记录本次第一乳酸数据在超过第一乳酸阈值后的最大值作为第一修正数据,并将所述第一温度数据和所述第一修正数据进行运算后修正所述第一乳酸阈值。
本步骤中,为了解决现有技术中灌注后乳酸持续升高的问题,在本实施例中发明人对第一乳酸数据进行持续修正,应当理解的是,本步骤中的修正过程是一个动态修正过程,并且每次修正的结果会影响下一次灌注的第一乳酸阈值。同时为了保证数据修正的准确性,发明人通过温度传感器101432实时获取第一温度数据,并通过修正模块1033计算第一修正数据,其主要的修正原理在于通过将下一次灌注对应的第一乳酸阈值修正到灌注时最大值与本次的第一乳酸阈值符合,并且结合温度因素进行进一步的修正,以此达到修正温度的目的,并且由于修正是动态的,所以最终的修正值会越来越逼近真实值。
需要说明的是,步骤203中,温度传感器101432获取所述目标灌注区域的温度发送至控制系统103之后,还包括:控制系统103基于获取的目标灌注区域的温度与控制系统103预设温度进行比较,当获取的目标灌注区域的温度超过控制系统103预设温度时,控制电温控箱1025开启直至下一次获取的目标灌注区域的温度低于控制系统预设温度。从而可以直接通过电温控箱1025对灌注温度进行调整,以辅助离体心脏降温。
本用于液体灌注的智能调控方法200可针对不同特征的离体心脏灵活的对灌注条件、时间、剂量等进行智能综合调控,实现了精准、及时的营养液灌注,保证了离体心脏活性,且全程无需手术医师操控,减少了手术医师负担。
具体的,在步骤205中,所述第一温度数据和所述第一修正数据进行运算后修正所述第一乳酸阈值具体包括以下步骤:
控制系统将103第一修正数据与控制系统103预设的第二乳酸阀的差值作为第二修正数据,通过第一温度数据修正所述第二修正数据作为第三修正数据,并计算第一乳酸阀值与第三修正数据的差值作为修正后的第一乳酸阀值。
该步骤中,第二乳酸阈值是一个固定值,用于表征应当要进行灌注操作的乳酸状态。通过将第一修正数据与第二乳酸阈值计算差值的方式,可以得出在进行灌注后乳酸含量最大值与第二乳酸阈值的差异,一般在开始的几次灌注中,这个差值是一个正值,然后基于不同温度状况对乳酸产生的影响进行修正。
在具体的实践中,发明人发现,手术环境下,目标灌注区域的温度是存在变化的,其变化的主要因素在于各种设备的发热、手术室环境温度的变化和手术灯温度的影响,这些因素是难以从源头上进行控制的,所以在本实施例中,发明人采用了一种直接对第二修正数据进行温度修正的方式进行,应当理解的是,温度修正可以采用温度对应乳酸变化曲线进行,也可以采用差值等技术进行,在此不多做复述。
对第二修正数据进行修正后生成的第三修正数据,在本步骤中被直接从第一乳酸阈值中减去作为新的第一乳酸阈值供下一次灌注检测使用。由于每次的第一乳酸阈值都在变化,会使得第一修正数据不断向第二乳酸阈值逼近,从而保证了检测的准确性,并且当第一修正数据开始低于第二乳酸阈值时,也可以通过上述的差值计算进行及时的回调。
需要说明的是,控制系统103在开启时最好对所述第一乳酸阈值进行初始化;具体的的初始化为:所述控制系统103将所述第二乳酸阈值赋值于所述第一乳酸阈值完成所述初始化。
发明人认为,由于以上整个第一乳酸阈值的调整过程可视为一种迭代逼近的过程,所以在迭代初始,从安全的角度出发,需要进行初始化,先将第二乳酸阈值赋值于第一乳酸阈值,即第一次进行灌注的时候,是以第二乳酸阈值为标准进行灌注的。
在上部步骤中,通过第一温度数据修正所述第二修正数据作为第三修正数据具体包括以下步骤:
控制系统103也即控制模块1032计算所述第一温度数据和控制模块1032预设的第二温度数据的比值,将比值作为第四修正数据;所述第一温度数据和所述第二温度数据均采用开氏温度;所述控制模块1032计算所述第二修正数据与所述第四修正数据的乘积作为第三修正数据。
该步骤中,为了实现对第二修正数据的温度修正,控制模块1032预设了第二温度数据作为一个标准化的数据,应当理解的是第二温度数据可选用设备箱102的恒温温度,也即开氏温度277.15K~283.15K的区间内任意值,通过产生的第四修正数据对第二修正数据进行修正后,就可以获取用于直接进行修正计算的第三修正数据。
在步骤204中,控制蠕动泵1022、膜氧合器1024开启进行灌注还包括以下步骤:
温度传感器101432获取所述第一乳酸数据超过所述第一乳酸阈值的时刻作为第一时刻,并获取本次第一乳酸数据在超过第一乳酸阈值后的达到最大值的时刻作为第二时刻;控制系统103也即控制模块1032计算所述第二时刻与所述第一时刻的差值作为修正时间,并计算所述最大值与所述第一乳酸阈值的差值作为修正乳酸数据;控制模块1032计算所述修正乳酸数据与所述修正时间的比值作为升高速度数据,并基于所述升高速度数据生成灌注流量数据;控制模块1032基于灌注流量数据控制电子调速阀1026进行流量修正,控制下一次灌注流量。
虽然通过前述的实施例已经可以实现对乳酸含量的准确检测和精准控制,但是如果每次都基于同样的流量进行灌注,对于乳酸含量的抑制是不利的,例如在到达第一乳酸阈值后,乳酸含量依然以较快速度升高,可能会使得乳酸含量的最大值达到一个较为危险的值,尤其是不同的人其对应的身体状况差异很大,其乳酸含量升高的速度也有较大差异,所以在上述具体灌注过程中采用了一种对乳酸含量升高速度自适应的方式来控制营养液灌注流量,以解决上述问题。
具体的,上述步骤中,主要采用开始灌注到乳酸上升到最大值的速度作为升高速度数据进行流量控制。具体的,可以通过线性插值进行流量控制,也可以通过数据拟合进行流量控制,通过本步骤的方式,可以很好的对不同的乳酸上升情况进行自适应控制。
作为上述方式的可行步骤,所述控制系统计算所述修正乳酸数据与所述修正时间的比值作为升高速度数据,并基于所述升高速度数据生成灌注流量数据,具体包括:
控制系统103也即控制模块1032预设有灌注基准速度和灌注基准流量;
控制模块1032计算所述升高速度数据与所述基准速度的比值乘以所述基准流量生成灌注流量数据。
本步骤中,通过线性计算方式,通过预设的灌注基准速度和灌注基准流量即可对灌注流量进行具体控制,从而可以保证流量实时调控。需要说明的是,灌注基准速度和灌注基准流量在现有技术中存在较多不同的标准,如通过大数据计算若干人的灌注速度和灌注流量的平均值作为最开始的灌注基准速度和灌注基准流量,或针对不同体重、年龄段的人获取的灌注速度和灌注流量的平均值作为最开始的灌注基准速度和灌注基准流量,由于现有技术较多,此处不作具体累述。
如图10所示,本用于液体灌注的智能调控方法200在实施时,还包括有应急步骤206,具体包括:
步骤2061、生物电传感器101435实时检测目标灌注区域的生物电信息;
步骤2062、控制系统103也即控制模块1032对所述生物电信号进行处理后生成电信号判别数据,并在所述电信号判别数据超过阈值时发出灌注触发指令,开始灌注。所述阀值为预设的生物电信号判别阀值,其数值低于心脏复跳时的生物电信号值。
本步骤206中,考虑到随着乳酸含量升高,心脏很容易出现复跳现象,这在手术过程中是非常危险的,而在科学实践中,发明人发现生物电信号的活跃程度可以很好的对心脏复跳进行检测和预测,所以在本步骤中采用生物电信号进行应急的判断,当电信号判别数据超过阈值时,说明心脏即将复跳,此时开始灌注即可很好抑制复跳。
具体的,步骤206中,对所述生物电信号进行处理后生成电信号判别数据具体为:控制系统103对所述生物电信号滤波降噪后,进行频域分析获取预设频带内的功率谱密度,并将所述功率谱密度作为电信号判别数据。由于生物电信号本身的噪声比较大,容易受到周围环境的影响,同时发明人还发现在不同的频带内,生物电信号所表征的复跳情况是不同的,所以在本步骤中采用了提取预设频带内的功率谱密度,并以功率谱密度进行复跳的判断依据。
需要说明的是,应急步骤206是在步骤202完成后即存在的与202并行的步骤,其与步骤202~205并没有前后之分,在整个用于液体灌注的智能调控方法200使用过程中均是存在的一种特殊应急步骤。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 用于液体灌注的智能调控方法
- 液体计量泵、电解液灌注设备及液体灌注方法