一种基于离散点轨迹拟合的车辆避障预警方法及装置
文献发布时间:2023-06-19 13:46:35
技术领域
本发明涉及车辆避障预警技术领域的一种车辆避障预警方法,尤其涉及一种基于离散点轨迹拟合的车辆避障预警方法,还涉及一种预警装置。
背景技术
车辆行驶轨迹可采用车载行驶记录仪等获取,但是车载行驶记录仪主要用于存储当前车辆行驶路况,并不具备车辆行驶轨迹预测功能。传统曲线拟合主要用于插值计算,也就是获得区间内某一自变量对应因变量的数值,而对于区间外预测精度一般较低。传统道路监控方式一般为静态监测,针对车辆行驶过程中可能发生的行驶方向偏离车道或碰撞障碍物等状况,并不能提前给出预警提示。另外,现有车载防碰撞系统一般采用距离传感,但不具有碰撞方向预测,仅仅适用于倒车等慢速停车情况,而且目前应用上述系统的车辆之间并不具备联网通信功能。
因此,为避免现有车辆行驶轨迹预测技术的不足之处,解决现有车辆行驶轨迹预测不准确、事故概率高的问题,需要一种车辆轨迹拟合方法及其警示装置。
发明内容
为解决现有的车辆行驶轨迹预测精度低的技术问题,本发明提供一种基于离散点轨迹拟合的车辆避障预警方法及装置。
本发明采用以下技术方案实现:一种基于离散点轨迹拟合的车辆避障预警方法,其包括以下步骤:
一种基于离散点轨迹拟合的车辆避障预警方法,其特征在于,其包括以下步骤:
S1:先获取车辆的历史轨迹数据,再根据所述历史轨迹数据对多个连续轨迹点进行NURBS样条拟合,得到拟合曲线,最后计算出所述拟合曲线端点的切线;
S2:先根据所述车辆在任意时刻的行驶速度和位置,获得所述车辆的最大制动减速度,以计算出最小安全行驶距离一,再计算出所述车辆在制动前的反应距离,最后根据所述最小安全行驶距离一和所述反应距离,计算出所述车辆的安全距离一;
S3:先计算所述拟合曲线端点的前一轨迹点的切线方向向量和实际速度,再根据所述切线方向向量和所述实际速度,计算出所述前一轨迹点处的拟合方向角度误差,然后在所述拟合曲线端点处以所述安全距离一为半径,所述拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域一,最后判断所述大概率碰撞区域一是否有固定障碍物,并计算出相应的预警概率一;
S4:先根据所述车辆在任意时刻相对一个移动障碍物的行驶速度和位置,计算出最小安全行驶距离二,再计算出所述车辆在制动前的反应距离,最后根据所述最小安全行驶距离二和所述反应距离,计算出所述车辆的安全距离二;
在所述拟合曲线端点处以所述安全距离二为半径,所述拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域二,最后判断所述大概率碰撞区域二是否有所述移动障碍物,并计算出相应的预警概率二;其中,所述多倍拟合方向角度误差中的倍数等于所述拟合曲线的拟合次数;
S5:根据所述预警概率一和所述预警概率二,对所述车辆进行预警。
本发明通过车辆历史轨迹拟合的方法,计算车辆大概率碰撞区域,预测碰撞方向,对车辆安全行驶具有精确预警功能,解决了车辆行驶轨迹预测精度低的技术问题,可以降低车辆行驶过程中的碰撞概率,可以借鉴应用到车辆自动驾驶中,弥补了现有技术的空白。
作为上述方案的进一步改进,所述步骤S5,先根据所述车辆的实际驾驶数据,预设出一个低风险预警概率、一个中风险预警概率和一个高风险预警概率,再将所述预警概率一分别与所述低风险预警概率、所述高风险预警概率比较,按照一个预设方案获得相应的预警等级,或/和,将所述预警概率二分别与所述低风险预警概率、所述高风险预警概率比较,按照所述预设方案获得相应的预警等级。
作为上述方案的进一步改进,所述步骤S1,NURBS样条拟合的次数为三次;定义当前时刻t的车辆行驶状态通过车辆传感单元读取,速度为V
作为上述方案的进一步改进,所述步骤S2,所述最小安全行驶距离一的计算公式为:
L
式中,L
所述反应距离的计算公式为:
L
式中,L
所述安全距离一的计算公式为:
Ls=L
式中,Ls为所述安全距离一。
作为上述方案的进一步改进,所述步骤S3,定义所述拟合曲线端点的前一轨迹点的切线方向向量v
式中,α为所述拟合方向角度误差。
作为上述方案的进一步改进,所述步骤S3,在所述大概率碰撞区域一中没有固定障碍物时,则所述预警概率一为零;
在所述大概率碰撞区域一中有固定障碍物时,则计算所述固定障碍物与位置S
所述预警概率一的计算公式为:
式中,P
作为上述方案的进一步改进,所述步骤S4,所述最小安全行驶距离二的计算公式为:
L
式中,V
作为上述方案的进一步改进,所述步骤S4,在所述大概率碰撞区域二中没有移动障碍物时,则所述预警概率二为零;
在所述大概率碰撞区域二中有移动障碍物时,则计算所述移动障碍物与位置S
所述预警概率二的计算公式为:
式中,P
作为上述方案的进一步改进,在所述步骤S5中,定义出一个低风险预警概率P
若P
若P
若P
若P
或/和,
若P
若P
若P
若P
本发明还提供一种预警装置,其应用上述任意所述的基于离散点轨迹拟合的车辆避障预警方法,其包括:
存储单元,其用于获取并储存车辆的历史轨迹数据;
逻辑综合单元,其用于根据所述历史轨迹数据对多个连续轨迹点进行NURBS样条拟合,得到拟合曲线,最后计算出所述拟合曲线端点的切线;所述逻辑综合单元还用于先根据所述车辆在任意时刻的行驶速度和位置,得所述车辆的最大制动减速度,以计算出最小安全行驶距离一,再计算出所述车辆在制动前的反应距离,最后根据所述最小安全行驶距离一和所述反应距离,计算出所述车辆的安全距离一;所述逻辑综合单元还用于先计算所述拟合曲线端点的前一轨迹点的切线方向向量和实际速度,再根据所述切线方向向量和所述实际速度,计算出所述前一轨迹点处的拟合方向角度误差,然后在所述拟合曲线端点处以所述安全距离一为半径,所述拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域一,最后判断所述大概率碰撞区域一是否有固定障碍物,并计算出相应的预警概率一;所述逻辑综合单元还用于先根据所述车辆在任意时刻相对一个移动障碍物的行驶速度和位置,计算出最小安全行驶距离二,再计算出所述车辆在制动前的反应距离,最后根据所述最小安全行驶距离二和所述反应距离,计算出所述车辆的安全距离二;所述逻辑综合单元还用于在所述拟合曲线端点处以所述安全距离二为半径,所述拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域二,最后判断所述大概率碰撞区域二是否有所述移动障碍物,并计算出相应的预警概率二;其中,所述多倍拟合方向角度误差中的倍数等于所述拟合曲线的拟合次数;以及
预警提示单元,其用于根据所述预警概率一和所述预警概率二,对所述车辆进行预警。
本发明的基于离散点轨迹拟合的车辆避障预警方法及装置具有以下有益效果:
1、该基于离散点轨迹拟合的车辆避障预警方法,其通过车辆历史轨迹拟合的方法,计算车辆大概率碰撞区域,预测碰撞方向,对车辆安全行驶具有精确预警功能。
2、该基于离散点轨迹拟合的车辆避障预警方法,其可以防止车辆行驶过程中,发生偏离车道、碰撞障碍物等现象,降低车辆之间的碰擦概率,可以借鉴应用到车辆自动驾驶中,弥补了现有技术的空白。
3、该预警装置,其有益效果与上述基于离散点轨迹拟合的车辆避障预警方法的有益效果相同,在此不再做赘述。
附图说明
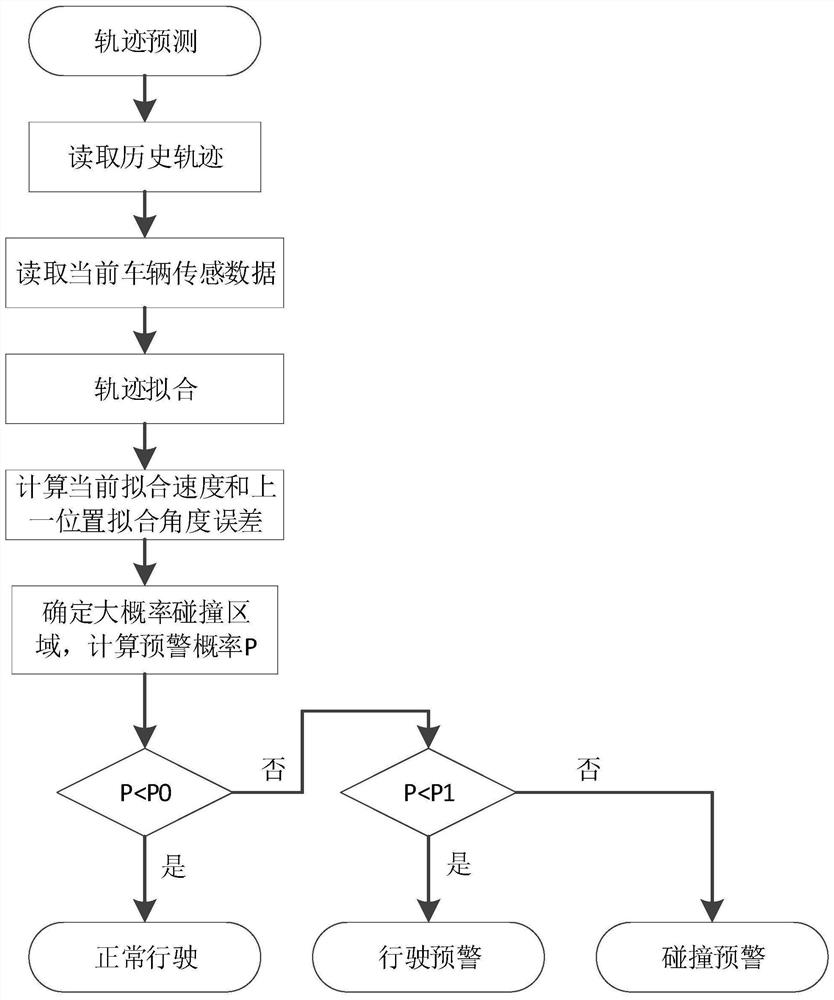
图1为本发明实施例1中的基于离散点轨迹拟合的车辆避障预警方法的流程图;
图2为本发明实施例1中轨迹点拟合示意图;
图3本发明实施例2中预警装置的结构框图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
实施例1
请参阅图1和图2,本实施例提供了一种基于离散点轨迹拟合的车辆避障预警方法。该预警方法首先从存储单元中根据历史轨迹数据进行BURBS样条拟合,然后计算拟合样条端点的切线。根据当前车辆数据,计算车辆安全距离Ls。根据安全距离和切线距离计算车辆碰撞概率P,并发布预警信息。在本实施例中,该基于离散点轨迹拟合的车辆避障预警方法主要从以下几个步骤实现,具体为步骤S1-S5。
步骤S1:先获取车辆的历史轨迹数据,再根据历史轨迹数据对多个连续轨迹点进行NURBS样条拟合,得到拟合曲线,最后计算出拟合曲线端点的切线。NURBS样条拟合的次数为三次;定义当前时刻t的车辆行驶状态通过车辆传感单元读取,速度为V
步骤S2:先根据车辆在任意时刻的行驶速度和位置,并且根据车辆性能参数,获得车辆的最大制动减速度,以计算出最小安全行驶距离一,再计算出车辆在制动前的反应距离,最后根据最小安全行驶距离一和反应距离,计算出车辆的安全距离一。在本实施例中,最小安全行驶距离一的计算公式为:
L
式中,L
反应距离的计算公式为:
L
式中,L
安全距离一的计算公式为:
Ls=L
式中,Ls为安全距离一。
步骤S3:先计算拟合曲线端点的前一轨迹点的切线方向向量和实际速度,再根据切线方向向量和实际速度,计算出前一轨迹点处的拟合方向角度误差,然后在拟合曲线端点处以安全距离一为半径,拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域一,最后判断大概率碰撞区域一是否有固定障碍物,并计算出相应的预警概率一。其中,多倍拟合方向角度误差中的倍数等于拟合曲线的拟合次数。在本实施例中,定义拟合曲线端点的前一轨迹点的切线方向向量v
式中,α为拟合方向角度误差。
在大概率碰撞区域一中没有固定障碍物时,则预警概率一为零。
在大概率碰撞区域一中有固定障碍物时,则计算固定障碍物与位置S
预警概率一的计算公式为:
式中,P
步骤S4:先根据车辆在任意时刻相对一个移动障碍物的行驶速度和位置,计算出最小安全行驶距离二,再计算出车辆在制动前的反应距离,最后根据最小安全行驶距离二和反应距离,计算出车辆的安全距离二。
在拟合曲线端点处以安全距离二为半径,拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域二,最后判断大概率碰撞区域二是否有移动障碍物,并计算出相应的预警概率二。其中,多倍拟合方向角度误差中的倍数等于拟合曲线的拟合次数,在本实施例中,均为三次。
最小安全行驶距离二的计算公式为:
L
式中,V
同样,在位置S
在大概率碰撞区域二中没有移动障碍物时,则预警概率二为零。
在大概率碰撞区域二中有移动障碍物时,则计算移动障碍物与位置S
预警概率二的计算公式为:
式中,P
步骤S5:根据预警概率一和预警概率二,对车辆进行预警。
在一些实施例中,先根据车辆的实际驾驶数据,预设出一个低风险预警概率、一个中风险预警概率和一个高风险预警概率,再将预警概率一分别与低风险预警概率、高风险预警概率比较,按照一个预设方案获得相应的预警等级,或/和,将预警概率二分别与低风险预警概率、高风险预警概率比较,按照预设方案获得相应的预警等级。
在本实施例中,障碍物为固定障碍物或者移动障碍物时,预警概率P为P
在其他实施例中,定义出一个低风险预警概率P
①若P
②若P
③若P
④若P
相对于移动障碍物,则:
(1)若P
(2)若P
(4)若P
(5)若P
当然,关于预警概率二的比较方式与预警概率一的类似,该方式既可以出现在本实施例中,也可以出现在其他实施例中,而且,两个预警概率的比较方式可以同时出现,也可以分别出现。这是因为,在一些实施例中,固定障碍和移动障碍可以同时出现,也可以各自出现,因此需要根据不同的情景进行预警。当然,在有一些实施例中,可以这两个预警概率所比较的预设概率可以不同,这可以根据实际实验测量所获得的数据进行确定,从而满足不同的避障要求。在障碍物为固定障碍物或者移动障碍物时,预警概率P为P
综上,相较于现有的车辆避障预警技术,本实施例的基于离散点轨迹拟合的车辆避障预警方法具有以下优点:
1、该基于离散点轨迹拟合的车辆避障预警方法,其通过车辆历史轨迹拟合的方法,计算车辆大概率碰撞区域,预测碰撞方向,对车辆安全行驶具有精确预警功能。
2、该基于离散点轨迹拟合的车辆避障预警方法,其可以防止车辆行驶过程中,发生偏离车道、碰撞障碍物等现象,降低车辆之间的碰擦概率,可以借鉴应用到车辆自动驾驶中,弥补了现有技术的空白。
实施例2
请参阅图3,本实施例提供了一种预警装置,该装置应用实施例1中的基于离散点轨迹拟合的车辆避障预警方法,具体包括控制单元、无线通信模块、存储单元、逻辑综合单元、预警提示模块。控制单元实现控制算法并与各单元交互数据,无线通信模块实现车载警示装置之间的通信功能,存储单元存储车辆历史轨迹数据,逻辑综合单元实现车辆行驶预警概率计算,预警提示模块实现对预警进行提示。
存储单元用于获取并储存车辆的历史轨迹数据,其中当前时刻t的车辆行驶状态通过车辆传感单元读取。逻辑综合单元,其用于根据历史轨迹数据对多个连续轨迹点进行NURBS样条拟合,得到拟合曲线,最后计算出拟合曲线端点的切线。逻辑综合单元还用于先根据车辆在任意时刻的行驶速度和位置,得车辆的最大制动减速度,以计算出最小安全行驶距离一,再计算出车辆在制动前的反应距离,最后根据最小安全行驶距离一和反应距离,计算出车辆的安全距离一。逻辑综合单元还用于先计算拟合曲线端点的前一轨迹点的切线方向向量和实际速度,再根据切线方向向量和实际速度,计算出前一轨迹点处的拟合方向角度误差,然后在拟合曲线端点处以安全距离一为半径,拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域一,最后判断大概率碰撞区域一是否有固定障碍物,并计算出相应的预警概率一。逻辑综合单元还用于先根据车辆在任意时刻相对一个移动障碍物的行驶速度和位置,计算出最小安全行驶距离二,再计算出车辆在制动前的反应距离,最后根据最小安全行驶距离二和反应距离,计算出车辆的安全距离二。逻辑综合单元还用于在拟合曲线端点处以安全距离二为半径,拟合曲线端点的切线向量所在直线对称,角度为多倍拟合方向角度误差的扇形区域定义为大概率碰撞区域二,最后判断大概率碰撞区域二是否有移动障碍物,并计算出相应的预警概率二。其中,多倍拟合方向角度误差中的倍数等于拟合曲线的拟合次数。
预警提示单元用于根据预警概率一和预警概率二,对车辆进行预警。无线通信模块主要用于收发无线信号,可以与交通指挥中心之间进行通信功能,也可以与报警设备、手机等进行信号传送,在此不做赘述。
实施例3
本实施例提供了一种计算机终端,其包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序。处理器执行程序时实现实施例1中基于离散点轨迹拟合的车辆避障预警方法的步骤。
基于离散点轨迹拟合的车辆避障预警方法在应用时,可以软件的形式进行应用,如设计成独立运行的程序,安装在计算机终端上,计算机终端可以是电脑、智能手机、控制系统以及其他物联网设备等。该基于离散点轨迹拟合的车辆避障预警方法也可以设计成嵌入式运行的程序,安装在计算机终端上,如安装在单片机上。
实施例4
本实施例提供了一种计算机可读存储介质,其上存储有计算机程序。程序被处理器执行时,实现实施例1中基于离散点轨迹拟合的车辆避障预警方法的步骤。基于离散点轨迹拟合的车辆避障预警方法在应用时,可以软件的形式进行应用,如设计成计算机可读存储介质可独立运行的程序,计算机可读存储介质可以是U盘,设计成U盾,通过U盘设计成通过外在触发启动整个方法的程序。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种基于离散点轨迹拟合的车辆避障预警方法及装置
- 一种车辆避障方法、车辆避障装置、车辆避障系统和车辆