一种基于字典匹配度的目标类别识别方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明属于水下目标识别分类领域,涉及一种利用不同模型的目标字典、稀疏重构与字典匹配度的思想,从接收回波在每个字典中可恢复的程度判断目标类型的方法。
背景技术
传统的利用分类器在处理差异较大的数据时效果很好,但数据变得复杂时对特征提取方法有了更高的要求,而且分类器对目标特征表达能力和泛化性下降。由于水声信号的复杂性和不稳定性,传统的分类方法不能更好的处理数据,无法精确的分类目标。为了提高在低信噪比下利用目标回波信号对目标识别分类的效率和精度,该发明是十分有必要的。
发明专利公开了“一种基于稀疏特征的目标类别识别算法”。其利用目标回波信号在字典域的稀疏表达作为目标特征,采用向量机分类算法进行目标识别分类。该方法用到SVM分类器进行分类,SVM算法对大规模训练样本难以实施,并对缺失的数据敏感,对参数和核函数的选择敏感,所以识别方法受分类器影响较大。
发明内容
要解决的技术问题
为了避免现有技术的不足之处,本发明提供一种基于字典匹配度的目标类别识别方法。
技术方案
一种基于字典匹配度的目标类别识别方法,利用目标字典、稀疏重构与字典匹配度的思想,从接收回波在每个字典中可恢复的程度判断,若匹配度高,则判定为该类目标;其特征在于步骤如下:
步骤1:将目标以其几何中心为原点进行旋转,并将目标旋转角度划分为N
ψ
同理可得不同目标模型的角度字典;
步骤2:将水下未知目标回波分别在每个字典稀疏表达得到稀疏向量;求解未知目标回波信号x在不同目标字典中的稀疏表达α时,即求解
其中,γ代表权系数,随噪声改变,α为稀疏表示向量;利用稀疏向量α分别在不同目标字典下重构出原信号;
步骤3:通过构造的已知模型目标字典重构未知目标信号,依据重建效果判断未知目标是哪类目标;为了更好的刻画和比较目标字典的重构性能,使用字典匹配度这一概念,设x为未知目标信号,
由字典匹配度的定义可以得知,a的取值为正数,范围为0到1之间,若目标字典重构信号效果好,则匹配度的取值趋向1,若目标字典重构信号效果差,则匹配度取值趋向于0;选择取值大的那一个,则未知目标与该已知目标的字典匹配度最高,判定未知目标为该类目标。
一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
有益效果
本发明提供的一种基于字典匹配度的目标类别识别方法,抛弃了以往提取特征可能会造成信息损失的缺点,不受分类器的影响,分别构造不同模型的目标字典,利用目标字典、稀疏重构和字典匹配度的思想,从声呐阵列接收到的目标回波信号在每个字典中可恢复的程度判断,若匹配度高,则判定为该类目标。该发明可以实现良好的分类效果,不需要分类器进行分类,减小了分类器的设计以及提取特征不完全对目标分类的影响,弥补了原有算法的不足。
本发明提供的目标识别分类方法可以针对不同环境、不同干扰下建立不同模型的字典,从而可以满足在各种环境下均可以重构目标信号,计算字典匹配度,从而达到识别分类的目的,不再受分类器参数选择的影响。经试验验证,该方法达到了非常好的效果,在相同信噪比条件下,目标识别分类精度高于用分类器识别分类的精度。
附图说明
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
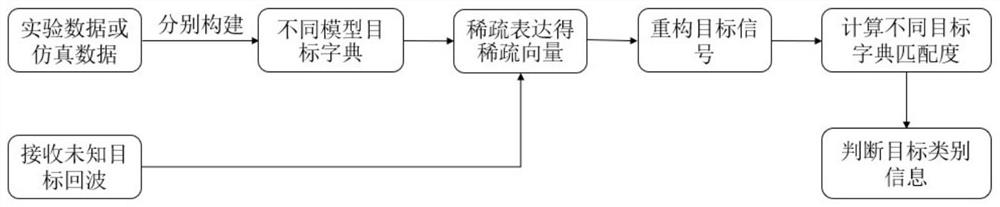
图1为该发明的流程图。
图2为该发明中所建立的有关AUV模型、鱼雷模型以及水雷模型的目标字典和相干特性图:(a)AUV模型的目标字典;(b)鱼雷模型的目标字典;(c)水雷模型的目标字典;(d)AUV模型的目标字典的相干特性三维图;(e)鱼雷模型的目标字典的相干特性三维图;(f)水雷模型的目标字典的相干特性三维图;(g)AUV模型的目标字典的相干特性等高线图;(h)鱼雷模型的目标字典的相干特性等高线图;(i)水雷模型的目标字典的相干特性等高线图;(j)AUV模型的目标字典的相干特性侧视图;(k)鱼雷模型的目标字典的相干特性侧视图;(l)水雷模型的目标字典的相干特性侧视图。
图3为该发明中在不同信噪比下基于不同模型字典未知信号匹配度仿真结果。
图4为该发明中基于不同发射信号字典匹配度的目标类别识别率。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
本发明的基本思路是首先分别构造AUV模型、鱼雷模型以及水雷模型的目标字典,将接收的未知目标回波在每个字典中稀疏表达得到稀疏向量,再由所得稀疏向量重构原信号,利用字典匹配度的概念,将未知信号与字典进行匹配,判断与哪个字典的匹配度高,则为哪类目标。
步骤一:首先构造AUV模型目标字典D
将AUV模型以其几何中心为原点进行旋转,旋转角度以1°为步长共旋转360°,每一个旋转角方向对应字典中的一个元素,即构造关于角度的字典D
ψ
同理可得鱼雷模型目标字典为D
步骤二:将水下未知目标回波分别在AUV模型目标字典D
其中,γ代表权系数,随噪声改变,α为稀疏表示向量。
l
步骤三:计算目标字典的匹配度。将未知信号与AUV模型目标字典D
设未知信号为AUV模型回波,利用已构造的三个目标字典,在不同信噪比下测试三个字典的信号重构能力。目标选取AUV模型、鱼雷模型、水雷模型。发射信号采用仿生信号,分别在-3dB、0dB、3dB和6dB下使用该算法测试未知信号与三个已知字典的匹配度,结果如表1与图3所示。
表1为该发明中图3的结果以表格的形式呈现出来,结果更加明确
从表1与图3可以看出,随信噪比变高,未知信号与目标字典的匹配度变高,AUV模型字典从SNR=-3dB时的0.48升高到6dB的0.71,鱼雷模型字典从SNR=-3dB时的0.37升高到6dB的0.52,水雷模型字典从SNR=-3dB时的0.19升高到6dB的0.35,说明信噪比越高,信号的重构效果越好;对比三个不同目标在同一信噪比下的匹配度,可以看出,在同一信噪比下,AUV模型字典匹配度均高于其他两个字典,此时即判定未知目标为AUV目标,说明该算法可以正确分类目标,验证了其有效性。
步骤四:为了分析算法抗噪性与稳定性,进行基于不同发射信号字典匹配度的目标识别研究,在不同的信噪比下测试识别率。在不同信噪比下基于不同发射信号的目标识别结果如表2和图4所示。
表2为该发明中图4的结果以表格的形式呈现出来
从表2和图4可以看出,当发射信号为60kHz-65kHz的LFM信号,随信噪比变高,识别率上升,在SNR=-3dB时达到73.89%;对比两个LFM信号,随着带宽增加,识别率在SNR=-3dB时达到77.69%;仿生信号的一次谐波识别率在SNR=-3dB时达到89.63%,仿生信号的二次谐波识别率-3dB达到91.94%;仿生信号的识别效果最好,可在SNR=-3dB时达到97.22%,因此验证了基于字典匹配度多目标类别识别方法的可行性,且当发射信号为仿生信号时基于字典匹配度目标类别识别效果最好,识别率在SNR=-3dB时达到97.22%。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
- 基于匹配字典和压缩感知的雷达一维距离像目标识别方法
- 基于匹配字典和压缩感知的雷达一维距离像目标识别方法