基于自适应Epsilon约束处理的约束多目标优化方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于约束多目标优化算法技术领域,特别涉及一种基于自适应Epsilon约束处理的约束多目标优化方法。
背景技术
约束多目标优化问题在生产与生活中普遍存在,不但包括多个相互冲突的目标函数,还包括大量的约束条件限制且要求严苛,这就造成了目标函数难以同时取得最优,同时因为决策空间有多个强约束的存在,使得可行域极其狭小难以求得最优可行解。例如,在公交车辆路径规划问题中,需要考虑道路状况、距离远近、覆盖范围、油电开支等问题;在经济环境调度问题中,需要满足各火力发电机组之间的发电量要求、燃料成本、废气排放水平控制等;在机器人夹具优化问题中,夹具尺寸、刚性、重量、多任务适配性、易维护性等。在强约束多目标优化问题中,如果调整其中任一目标的状态,往往会引发其中一个或多个目标的性能下降或者直接导致解决方案不可行。所以约束多目标优化问题是在满足各项约束条件的情况下,权衡兼顾各个目标,帮助选出最优的解决方案。
近二十年来,约束多目标优化问题受到广泛关注,学者们提出了各类能够在单次运算条件下找到一组最优解的进化算法。但在实际问题中,约束多目标优化问题常因为严苛约束条件的存在,会直接对最优解的最佳性能产生影响。例如,在飞行器结构优化问题中,载荷量、与飞行距离、飞行速度等会相互制约从而影响性能;在工业生产调度问题中,订单量、与操作工人数量、机器设备数量、时间成本等约束会直接影响生产工作安排;在经济增长问题中,经济总量、人均收入、人口数量、资源剩余量与环境保护等相互限制,因此,对约束多目标优化问题的研究具有十分重要的理论意义和应用价值。求解约束多目标优化问题最优解的这一过程称为约束多目标优化。在约束多目标优化问题中,有多种求解技术,其中可分为罚函数法、可行性法则、随机排序法、Epsilon约束处理法、多目标优化法、混合法等六大类。另外,帕累托Pareto优化理论在1906年由Vilfreto Pareto等人提出,只有当一个目标不得不以牺牲其他目标为条件进行优化,才达到资源分配的最优化。其中Pareto最优解构成的解集称为Pareto最优前沿。强约束多目标优化问题特征是决策变量和约束条件很多,这就造成了决策变量可行域空间极小,容易陷入局部最优不可行解难以求得可行解,因此如何使用约束处理技术和进化算法在迭代求解过程中,找到可行解并满足约束成了非常关键的问题。
发明内容
Epsilon约束处理法是通过设定Epsilon值将约束划分为不同的区间,个体之间的比较在不同的约束区间内采用不同的处理方法,该方法是对可行性法则的扩展,将一部分优质的不可行解当做可行解处理,有效避免算法过早落入局部最优。
本发明的目的是提供一种基于自适应Epsilon约束处理的约束多目标优化方法,也可以称之为基于自适应Epsilon约束处理技术的多目标优化差分进化算法(MODE-SaE)。在约束多目标优化过程中可以获得具有良好收敛性和多样性的Pareto最优解。包括以下步骤:
S1:在初始化种群之后,将初始种群P
S2:对种群P
S3:通过基于自适应Epsilon约束支配选择算子从P
本发明的方法是在找出测试函数的Pareto最优解集。在实际应用中,决策者还需要根据实际情况从解集中挑选符合要求的解。
优选的,所述步骤S1包括:
S11:初始化种群,产生初始种群P
S12:对初始种群P
S13:计算初始种群P
S14:初始化时DE差分进化算子参数,F=0.5,CR=1.0;
S15:对外部档案Nadir点不变次数初始化:N
S16:循环代数:G=1。
优选的,所述步骤S2包括:
S21:输入种群P
S22:对种群P
S23:将后代种群childP
S24:通过DE差分进化和多项式变异产生外部档案A的后代种群childP
S25:将childP
S26:根据DE参数自适应切换机制对DE差分进化算子进行更新;
S27:根据分区拥挤距离管理外部档案A。
优选的,所述步骤S26中DE参数自适应切换机制描述如下:
算法运行初期,更注重全局搜索能力,交叉概率参数CR的设置需要足够大才能保证算法变异性,增益系数F需要取值适中保证算法收敛速度,所以初始DE算子参数设置为F=0.5,CR=1.0,当算法收敛时,更加关注算法的局部搜索能力,所以增益系数F降低,此时DE算子的参数设置为F=0.1,CR=1.0,两种参数设置并不是一成不变的,为了防止算法过早落入局部最优,算法设置局部搜索因子I
优选的,所述步骤S27中外部档案A管理机制如下:
如果外部档案A的规模超过设定大小N
(1)拥挤距离计算:对外部档案A中的所有个体拥挤度距离进行计算;
(2)目标空间标准化:通过对个体的目标函数归一化操作将目标空间标准化,其计算公式为:
式中,理想点Z
(3)种群分区:计算每个个体同目标空间均匀分布权重向量之间的角度,将每个个体分配到具有最小角度的权重向量所在区域,分区计算公式为:
Φ
式中,N=N
(4)个体选择:在个体选择过程中,如果某个向量区域只有一个个体,则设定该个体拥挤距离无限大,否则将向量区域中PBI聚合函数值最小的个体设为无限大;然后对外部档案中的个体拥挤度距离降序排列,选择N
ming
式中,θ是权衡收敛性和分布性的参数,这里默认设为5。
优选的,所述步骤S3包括:
S31:通过基于Epsilon约束支配的选择算子,对P
S32:计算S31步骤生成新种群P
S33:通过不可行解约束违反度最大最小值自适应调节约束违反度ε(G):
S34:迭代次数G=G+1;;
S35:最终输出外部档案A中的N
优选的,所述步骤S31中分为以下三种情况:
(1)当种群P
(2)当种群P
(3)当种群P
优选的,所述步骤S33中根据种群P
(1)种群P
(2)种群P
式子中,T
在本发明中,为了应对强约束多目标问题的特点,能够在狭小可行域内找到具有良好收敛性的Pareto解集S,摒弃了传统的Epsilon约束处理思想,采用了DE差分进化参数自适应切换机制来处理优化过程,实现算法全局搜索和局部搜索的动态切换,并且提出了自适应Epsilon约束处理技术,根据算法迭代过程与可行解存在情况,自适应调整Epsilon值,能够帮助保留一些约束违反度不高而目标函数较优的不可行解来增加种群的多样性,有助于算法跳出局部最优不可行解的陷阱,最终求得可行解。
附图说明
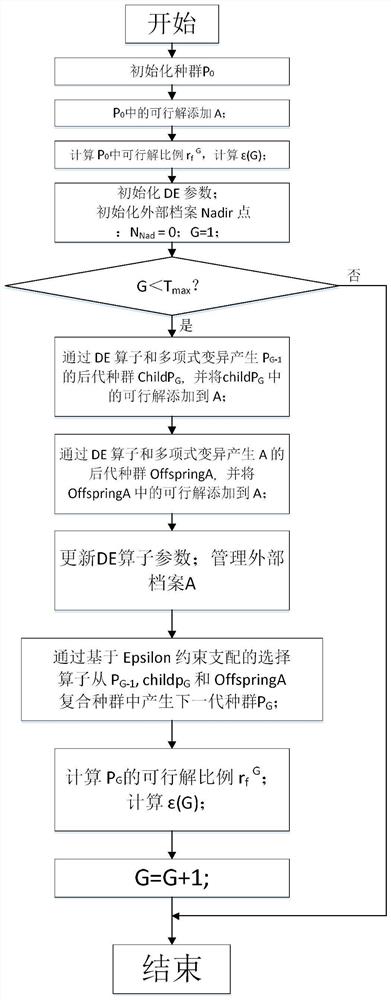
图1为本发明的基于自适应Epsilon约束处理技术的多目标差分进化算法的总流程图;
图2为本发明的自适应Epsilon约束处理技术流程示意图;
图3为本发明的自适应Epsilon不同阶段变化趋势图;
图4为本发明DE参数自适应切换机制流程图;
图5为本发明基于Epsilon约束支配选择算子流程示意图;
图6为本发明与其他算法在NCT6测试问题上的仿真实验效果图;
图7为本发明与其他算法在LIR3测试问题上的仿真实验效果图。
具体实施方式
为了更好地解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明做详细描述。
在本发明中,为了应对约束问题存在的可行域狭小的问题,将搜索过程分为不存在可行解阶段和存在可行解阶段,在搜索时自适应调整Epsilon值,保留约束违反度小且目标函数较优的个体,并且搭配自适应切换DE差分进化算子参数与外部档案维护机制,在搜索优化时,解一旦有陷入局部最优的情况出现,算法能够帮助跳出局部最优,防止算法落入局部不可行区域。
设计的整个算法流程图如图1所示,本发明的方法是以种群中可行解比例为基础,在种群迭代循环的过程中,自适应地调整参数,跳出局部最优来达到寻优的目的。本发明的方法包括:
Step1:初始化种群,得到初始化种群P
本实施案例中初始化的种群是在测试函数的决策变量空间上均匀分布随机产生得到的一组解的集合。
Step2:对初始种群P
Step3:对初始种群P
Step4:对DE差分进化算子初始化F=0.5,CR=1.0,外部档案Nadir点不变的次数:N
Step5:判定迭代次数G是否小于最大迭代次数T
Step6:通过差分进化DE算子和多项式变异对P
Step7:通过差分进化DE算子和多项式变异对外部档案A进行操作,产生A的后代种群OffspringA,并将OffspringA中的可行解添加到外部档案A中;
具体地,在Step6和Step7实现过程中对PG-1和外部档案A进行的DE差分进化操作和多项式变异,目的是为在种群当前位置附近产生新的个体,保证进化过程的推进。
Step8:根据DE参数自适应切换机制更新DE差分进化算子参数,并根据外部档案管理机制对外部档案A进行操作;
Step9:基于Epsilon约束支配的选择算子从P
具体地,Step9步骤中对复合种群中的个体分为两类,一类满足Epsilon约束为P
Step10:计算种群P
Step11:循环次数G=G+1,并判断是否满足最大迭代次数T
Step12:输出外部档案A作为最终解,结束算法。
本实施例的方法是在找出测试函数Pareto最优解集。在实际应用当中,决策者需要根据实际情况从Pareto最优解集中挑选出符合要求的解。
为了更好地理解本发明上述步骤的细节,以下对算法关键环节进行详细叙述。
如图2所示,为Step8中DE差分进化算子自适应切换机制流程图,在经典DE算子中,种群中所有个体都使用相同的F和CR参数产生个体,在进化过程中始终保持不变。本发明根据进化不同阶段的不同特点,针对性地提出了DE参数自适应切换机制。
Step81:对外部档案A规模大小与种群设定规模N
Step82:判断Z
Step83:对外部档案Nadir点不变次数N
Step84:结束。
如图3所示为基于Epsilon约束支配的选择算子,用于选取优质解。具体步骤如下:
Step91:对复合种群中的所有解进行判定,约束违反度≤约束松弛Epsilon的解放入种群P
Step92:将种群P
Step93:若P
Step94:结束。
如图4所示,Step10中都使用了自适应Epsilon约束处理技术,是为了在搜索过程中保留约束违反度不高目标函数较优的不可行解,避免丧失个体多样性,其基本思想是将整个搜索过程分为不存在可行解和存在可行解两个阶段,不存在可行解阶段Epsilon值根据搜索阶段不断缩小,存在可行解阶段时,Epsilon值在切换时有回调操作,跳出局部。主要流程如图2所示,其中主要步骤包括:
Step101:自适应Epsilon约束处理技术中约束松弛值Epsilon随着种群迭代次数G变化分为存在可行解阶段和不存在可行解阶段,首先判定当前种群中是否存在可行解,不存在可行解跳至Step102,存在可行解则跳至Step103。
Step102:若种群处于不存在可行解阶段,ε(G)维持在不可行解的最大约束违反度Φ
Step103:若处于存在可行解阶段,且r
Step104:若处于存在可行解阶段,当r
如图5(a)所示,不存在可行解阶段算法求解时,Epsilon值根据迭代次数递增下调,当种群中存在可行解阶段如图5(b)所示,Epsilon值变化时,会有回调操作,目的是跳出局部最优。
有效性验证
如图6所示,首先仿真展示了本发明算法和其他算法在NCT6测试问题上的仿真实验效果图,Pareto最优前沿由约束边界和无约束Pareto前沿组成,算法函数评价次数为200000次,可行域百分比小于0.1%,每个算法对测试问题独立运行30次。其中“+”号为每个算法所找出的最优解,“.”号为NCT6测试问题的真实Pareto最优前沿。如图7所示,仿真展示了本发明算法与其他算法在LIR3测试问题上的仿真实验效果图,Pareto最优前沿是分段连续的,可行域百分比小于0.1%,算法函数评价次数为300000次,每个算法对测试问题独立运行30次。其中圆圈为每个算法所找出的最优解,线段为LIR3测试问题的真实Pareto最优前沿。从图6、图7中可以看出应用自适应Epsilon约束处理技术的本发明算法(MODE-SaE)所获得的Pareto最优前沿能够较好的收敛于真实前沿,而对比算法所获取的前沿不稳定或过早陷入局部最优,不能较好地收敛,从而说明了本发明理论上与实际仿真中的有效性。
可靠性验证
表1和表2为本发明算法(MODE-SaE)和其他五种算法在各个基准问题上IGD指标的均值和方差与HV指标均值和方差。一组采用新约束测试问题(New Constrained TestProblems,NCTPs)中的九个,在实验中这九个测试问题都具有二维目标函数和七维决策变量。第二组是四个大不可行区域约束多目标优化问题(Large Infeasible Region CMOPs,LIRCMOPs),它们的目标空间都具有大的不可行区域。在实验中这组测试问题都具有二维目标函数和三十维决策变量,PF都只位于约束边界。最后一组是受约束的DTLZ测试问题之一,名为C1-DTLZ1。它的PF与无约束PF相同,该基准测试问题具有二维目标函数和十维决策变量。对于NCTPs和C1-DTLZ1,算法将在200000次函数评价后终止运行;对于LIRCMOPs,算法将在300000次函数评价后终止运行。基准测试问题可分为三组。
表1MODE-SaE算法和其他五种算法在各个基准问题上IGD指标的均值和方差
表2MODE-SaE算法和其他五种算法在各个基准问题上的HV指标均值和方差
上述仿真结果为每个算法30次独立运行之后记录,将本发明提出的MODE-SaE算法获得的结果与其他五种算法(NSGA-II,RVEA,MOEA/DD,GDE3和CTAEA)获得的结果在HV性能指标和IGD性能指标方面进行比较,结果如表1和表2所示。表中,各测试函数上的最优结果用加粗表示;+、-和≈表示该算法优于、劣于和相似于MODE-SaE算法;NaN为算法不能在该测试函数上每次运行获得可行解。可见,就HV指标和IGD指标而言,MODE-SaE算法在所有14个测试问题中明显优于NSGA-II,RVEA,MOEA/DD和GDE3,尽管14个测试问题的可行域都极小,但本发明所提出的算法,依然能获得具有良好收敛性的Pareto最优解。
需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。本发明说明书包含多项发明构思,诸如“优选地”、“根据一个优选实施方式”或“可选地”均表示相应段落公开了一个独立的构思,申请人保留根据每项发明构思提出分案申请的权利。
- 一种基于约束多目标优化算法的无线传感器配置优化方法
- 一种最优点个数约束的数据流处理系统多目标优化方法